1.本发明涉及一种确定机舱的定向的方法。
背景技术:
2.风力涡轮机的机舱(例如相对于真实(地理)北方)的定向的确定考虑到多种原因可能是重要的。首先,由于机舱通常指向风,其定向可用作风向的指示。该指示可用于分析风力涡轮机的性能。例如,由于风力涡轮机处于另一风力涡轮机的尾流中,所以风力涡轮机可能不会产生像对于给定的风力强度所期望的那样多的功率。因此,如果风向是已知的,则可以考虑这种欠佳性能。另选地,风向可用于修改风力涡轮机的操作。例如,已知的是,如果风从某一方向到来,则预期大量的风切变,因此风力涡轮机被降额。
3.风力涡轮机的定向可手动确定,例如通过与机舱成直线地站立在涡轮机后面的一定距离,然后用罗盘测量风力涡轮机的视方向。然后,在其被手动输入到风力涡轮机的控制系统中之前,该定向测量必须从磁北校正到真(地理)北。这种方法易于人为误差。
技术实现要素:
4.本发明的第一方面提供一种确定风力涡轮机的机舱的定向的方法,其中所述机舱携带全球导航卫星系统(gnss)传感器,所述方法包括:使所述机舱在一系列定向之间偏航;基于由所述gnss传感器测量的一系列校准位置获得轨迹数据,其中当所述机舱处于所述一系列定向中的相应定向时,由所述gnss传感器测量每一校准位置;存储所述轨迹数据;在存储所述轨迹数据之后,用所述gnss传感器测量新位置;以及基于所述存储的轨迹数据和所述新位置确定所述机舱的定向。
5.确定机舱的定向可包括识别轨迹数据中最接近新位置的位置;以及识别机舱的与所识别的位置对应的定向。轨迹数据中的所识别的位置可以是由gnss传感器测量的校准位置中的一个,或由轨迹数据记录的一些其他位置。轨迹数据可以存储为查找表,其使得能够基于所识别的位置来查找机舱的定向。
6.gnss传感器可以在以偏航轴为中心的圆上移动,并且轨迹数据可以指示偏航轴的位置。例如,轨迹数据可以包括偏航轴的位置坐标或由偏航轴的位置坐标构成。
7.所存储的轨迹数据可限定参考系,并且新位置可被转换到该参考系中,然后用于通过三角法来确定机舱的定向。
8.轨迹数据可以包括校准位置的检验,或者基于校准位置的几何函数(诸如圆)。
9.轨迹数据可以包括多组轨迹数据,每组轨迹数据对应于风力涡轮机所经历的不同水平的推力。例如,每组轨迹数据可以包括查找表(或查找表的一部分),其包含与相应的推力水平相对应的一组校准位置。
10.每组轨迹数据可以通过使机舱在一系列定向之间偏航来获得,其中风力涡轮机经历不同水平的推力中的相应一个;以及基于由gnss传感器测量的一系列校准位置来获得该组轨迹数据。
11.可以通过以下方式确定机舱的定向:基于新位置选择轨迹数据集合中的一个,并且基于轨迹数据集合中的所选择的一个确定机舱的定向。
12.所述方法还可包括以下步骤:确定与所述gnss传感器在所述机舱上的位置相关联的校正角;以及基于所述校正角确定所述机舱的定向。
13.可以通过以下方式确定校正角度:使用加速度计来确定风力涡轮机的振动方向,并且基于振动方向确定校正角度。
14.可基于传感器在机舱上的已知位置来确定机舱的定向。传感器在机舱上的已知位置可以通过测量或通过设计来获得。例如,通过将传感器设计为定位在机舱的中心,传感器可以是已知的。另选地,可通过以下方式获得传感器在机舱上的位置:通过定向测量,或通过使用加速计确定风力涡轮的振动方向并基于振动方向确定机舱上的传感器的角位置。
15.校准位置和新位置可以由gnss传感器相对于卫星星座和地面基本模块来测量。
16.机舱可以携带多个全球导航卫星系统(gnss)传感器,可以基于由gnss传感器测量的一系列校准位置来获得轨迹数据,其中,当机舱处于一系列定向中的相应定向时,由gnss传感器测量每个校准位置;gnss传感器可以各自测量相应的新位置;并且可以基于所存储的轨迹数据和gnss传感器的新位置来确定机舱的定向。
17.通过该方法确定的机舱的定向可以是地理方位(例如,相对于地理或真北的方位)。
18.根据本发明的另一方面,提供了一种风力涡轮机,包括:塔架;可旋转地安装在塔架上的机舱;由机舱携带的全球导航卫星系统(gnss)传感器;以及控制系统,其构造成:使机舱在一系列定向之间偏航;基于由gnss传感器测量的一系列校准位置获得轨迹数据,其中,当机舱处于一系列定向中的相应定向时,由gnss传感器测量每个校准位置;存储轨迹数据;在存储轨迹数据之后,利用gnss传感器测量新位置;以及基于存储的轨迹数据和新位置确定机舱的定向。
19.控制系统可构造成通过根据本发明的第一方面的方法确定机舱的定向。
附图说明
20.现在将参照附图描述本发明的实施例,其中:
21.图1示出了风力涡轮机;
22.图2a示出了根据一个实施例的机舱的俯视图;
23.图2b示出了如何确定机舱的定向;
24.图3a示出了从机舱中心平面偏移的gnss传感器;
25.图3b示出了可以如何测量校正角度;
26.图3c示出了如何使用校正角度来校正机舱定向的测量;
27.图4示出了经历推力的图1的机舱的俯视图;
28.图5示出了根据另一实施例的机舱的俯视图;
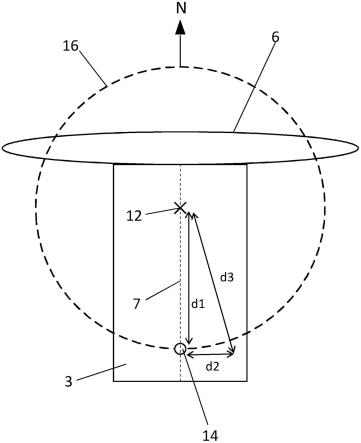
29.图6示出了根据又一实施例的机舱的俯视图;以及
30.图7示出了根据又一实施例的机舱的俯视图。
具体实施方式
31.图1示出了风力涡轮机1。风力涡轮机1具有塔架2和位于塔架2的顶部处的机舱3。风力涡轮机转子4连接到机舱3并且布置成相对于机舱3旋转。风力涡轮机转子4包括风力涡轮机毂5和从毂5延伸的多个风力涡轮机叶片6。虽然示出了具有三个叶片6的风力涡轮机转子4,但是可以使用不同数量的叶片,诸如两个或四个。
32.图2a从自上而下的角度示出了机舱3和风力涡轮机叶片6。机舱3可由偏航驱动系统11旋转,使得其相对于塔架2围绕垂直偏航轴12偏航。机舱3可偏航通过完整的360
°
。
33.机舱3携带gnss传感器14。gnss传感器14可以安装在机舱的顶部上(例如,在冷却器顶部上)。或者,gnss传感器14可由从机舱延伸的臂保持,或其可由风力涡轮的任何其它部分支撑,所述任何其它部分在机舱偏航时与机舱一起旋转。
34.gnss传感器14是使用一个或多个全球导航卫星系统(诸如gps、伽利略、glonass、北斗)来确定其位置的位置传感器。当机舱3偏航时,gnss传感器14的位置改变,因为gnss传感器14偏离偏航轴12。gnss传感器14可以用厘米精度测量其位置。位置可以被记录为一组坐标,例如(经度、纬度)、(x,y)或(r,θ)。
35.gnss传感器14使用卫星星座来确定其位置。可选地,传感器14可以使用地面实时动态(rtk)基本模块来提高其位置测量的精度。该rtk模块可以在风电场中的多个风力涡轮机之间共享。
36.在图1中以10示出了风力涡轮机的控制系统10。在这种情况下,控制系统10位于塔的底脚处,但是它可以位于任何其他位置(例如在机舱中),或者控制系统10可以分布在风力涡轮机的不同部分上。控制系统10连接到偏航驱动系统11和gnss传感器14。控制系统10构造成通过下面描述的方法确定风力涡轮机的机舱的定向。
37.控制系统10引导偏航驱动系统11使机舱3在一系列定向或偏航角之间偏航,并且针对每个定向进行校准位置测量。这可以在涡轮机开始操作和发电之前在单独的校准例程中完成。例如,在风力涡轮机开始操作之前,常见的是执行电缆扭转检查,其中机舱被偏航通过一系列旋转,扭转电缆,直到安全机构被触发,然后机舱被偏转回来,解开电缆。线缆扭转检查的主要目的是检查安全机构,但是可选地,可以在这种线缆扭转检查期间进行校准位置测量。这可以提供一组大的校准位置测量,例如通过一个方向上的5转和相反方向上的5转。替代地,校准位置测量可在风力涡轮机的操作寿命的初始阶段期间(例如,在其可预期指向许多方向时的第一年期间)进行。在这种情况下,校准位置测量可能无法用于所有方向,但是足够的测量是可能的。
38.与校准位置测量相关联的一系列定向可以在整个360
°
旋转上具有近似相等的分布。在每个定向中,机舱3面向不同的方向。在图2a中所示的时间,机舱3处于其面向真北(即,地理北)的定向中。对于每个定向,gnss传感器14处于不同的位置。在每个定向处,gnss传感器14测量相应的校准位置。
39.由控制系统10基于一系列校准位置(对应于一系列定向)获得并存储轨迹数据。例如,轨迹数据可以包括校准位置测量值的核对。因此,在图2a的情况下,如果在笛卡尔(x,y)坐标中记录gnss传感器14的位置,则在机舱指向北时的校准位置测量可以是(0,-1)。轨迹数据指示当gnss传感器14在一系列定向之间偏航时由gnss传感器14行进的轨迹(在这种情况下,为圆16)。
40.不是将轨迹数据存储为未处理的校准位置测量值的核对,而是可以处理位置校准测量值,使得轨迹数据以某种其它方式存储,例如作为几何函数,或者简单地作为圆16的中心的坐标(也是偏航轴12的位置)存储。
41.在已经如上所述地存储了轨迹数据之后,可以使用所存储的轨迹数据来确定风力涡轮机的机舱的定向。因此,可以用gnss传感器14来测量新位置(x1,y1);并且基于所存储的轨迹数据和新位置来确定机舱的定向。例如,如果新位置(x1,y1)是(0.707,-0.707),则轨迹数据可以指示机舱定向是西北。预期精度在1度以内。
42.图2b更详细地示出了如何确定机舱定向。位置14a指示当机舱指向北(对应于图2a)时gnss传感器14的位置。由于gnss传感器14居中地安装在机舱上,所以该位置14a是由于偏航轴12的正南方。因此,从位置14a到偏航轴12的线15在南北方向上延伸。
43.机舱已经逆时针偏航45
°
,因此它现在指向西北,并且gnss传感器14已经移动到图2b中所示的新位置(x1,y1)。从新位置(x1,y1)到偏航轴12的线17以与南北方向15成45
°
角延伸。因此,通过构造线17,并且测量相对于南北方向15的角度,可以获得机舱定向。
44.当机舱指向北时,gnss传感器14的位置可以以多种方式获得。
45.优选地,基于机舱上的传感器的已知位置来确定机舱的定向。机舱上的传感器的已知位置可以通过测量或通过设计来获得,如下面的各种示例中所描述的。
46.在第一示例中,如果gnss传感器14被设计为准确地居中安装(在机舱的中心平面7上),则可以假设当机舱指向北时它是由于偏航轴12的正南方。
47.可能无法将gnss传感器14居中地安装在机舱上,因为其它设备必须放置在该中心位置处。因此,在其他示例中,gnss传感器14不安装在中心平面7上,但是其在机舱上的位置仍然是已知的。因此,当机舱指向北时,gnss传感器14的位置可基于其在机舱上的已知位置而获得。
48.例如,操作者可以手动测量从偏航轴12到gnss传感器的距离d1以及从gnss传感器到机舱的中心平面7的距离d2,并且将距离d1、d2键入到控制器中。然后可以通过三角法从距离d1和d2获得机舱上的传感器的角位置(即,角度d1d3)。或者,距离d1、d2可以是设计已知的。可替代地,可以存在两个或更多个可能的位置,并且每个位置的距离d1、d2是已知的。在这种情况下,简单地需要将传感器占据的可能位置中的那个位置键入到控制器中。或者,距离d2可以是已知的(通过测量或设计),但是距离d1可以是未知的。在这种情况下,可以通过分析校准位置测量值以获得圆16的半径(其为距离d3)来确定从传感器14到偏航轴12的距离d3。然后可以根据距离d2和d3通过三角法来获得传感器的角位置(角度d1d3)。
49.在上述所有示例中,不需要进行机舱的定向的校准测量,因为gnss传感器14可以使用卫星来确定南北方向。换句话说,gnss系统固有地已知南北方向。
50.如果gnss传感器14相对于机舱的位置是未知的,则可能需要进行机舱的定向的一个或多个校准测量。例如,机舱可被偏航直到它指向北,并且测量传感器的(x,y)位置。可替代地,可以利用罗盘来测量机舱的定向,并且该定向测量与gnss传感器14的特定(x,y)位置测量相关联。然后可以获得线15。例如,参照图2b,如果机舱指向西,则gnss传感器将处于位置14b。测量机舱的定向(在这种情况下90
°
)以及传感器的位置(在这种情况下,(1,0))。现在可以通过围绕圆移动90
°
来获得线15的方向。这种类型的校准过程不是优选的,因为它易于人为误差。
51.在以上示例中,通过基于新位置(x1,y1)计算偏航轴12的(x,y)坐标以及线15的方向来获得机舱的定向。在这种情况下,如果gnss传感器14准确地居中地安装在机舱上,则轨迹数据可仅由在圆的中心处的偏航轴12的坐标组成,不需要其它信息。可替代地,所存储的轨迹数据还可以包括如上所述机舱的定向的校准测量,和/或机舱上的传感器的位置(例如,距离d2、距离d1和d2、角度d1d3或可以用于在机舱指向北时推断gnss传感器14的位置的任何其他数据)。
52.在另一示例中,所存储的轨迹数据可以基于偏航轴12的已知位置和当机舱指向北时gnss传感器14的位置来简单地定义参考系的原点和定向。换句话说,参考系可以被定义为使得偏航轴12在坐标(0,0)处,并且当机舱指向北时gnss传感器14的位置在坐标(1,0)处。因此,可简单地基于在新位置处的gnss传感器14的坐标(x1,y1)通过三角法来确定机舱的定向。例如,如果新位置是(x1,y1),则可以通过三角法获得机舱的定向为tan-1
(x1/y1)。
53.以上示例依赖于在校准例程期间gnss传感器14的轨迹是在偏航轴12上居中的圆16的假设。在另一示例中,轨迹数据可以包括具有一系列校准位置测量(在任何参考系中)和与每个校准位置测量相关联的机舱定向的查找表。该方法不依赖于在校准例程期间gnss传感器14的轨迹是在偏航轴12上居中的圆16的假设。
54.这样的查找表的基本示例在下面的表1中示出:
55.表1
56.校准位置测量机舱定向(0,-1)北(0,1)南(-1,0)东(1,0)西
57.在这种情况下,不是通过计算来确定机舱定向,而是通过识别轨迹数据中最接近新位置的位置来确定;以及使用查找表来检索与所识别的位置相对应的机舱的定向。
58.传感器14可安装在任何位置,只要其与机舱一起旋转即可。在图2a的示例中,传感器14安装在机舱的中心平面7上,并且与偏航轴12间隔开距离d1。如果传感器14从机舱上其在校准例程期间占据的位置移动,则其位置不再可用于测量机舱定向。
59.图3a示出了该问题。在这种情况下,gnss传感器14已经从机舱的中心平面7移动了距离d2。机舱指向北,但gnss传感器14现在处于圆16上的位置处,这将暗示机舱3已向西偏航。
60.该问题使得期望检查机舱3上的gnss传感器14的位置,以便确保自从在校准例程中已经获得轨迹数据以来其未被移动。
61.图3b示出了如何解决该问题。机舱3承载加速度计8,其检测机舱3的振动,其在机舱3的纵向方向上(即,在机舱面向的方向上)最显著地发生。例如,如果机舱3面向北,则机舱3将在南北方向上振动。
62.加速度计8可以是双轴加速度计,因此它可以感测振动的幅度和方向。加速度计8可由机舱携带,或者其可由风力涡轮机的与机舱一致地振动的任何其它部分承载。加速度计8也可以内置到gnss传感器14中,因此它们基本上处于相同的位置。
63.如果gnss传感器14位于中心平面7上,则振动方向将是径向的,换句话说,振动将
朝向和远离圆16的中心处的偏航轴12,如箭头38所指示,与圆的半径一致。如果传感器14没有位于机舱的中心平面7上(因为它已经从中心平面7移动,或者已经从中心平面7偏移距离d2),则振动方向将不是径向的。这由没有指向偏航轴12的南北箭头34指示。因此,通过感测振动方向是否是径向的,可以推断gnss传感器14的位置,并且具体地确定角度d1d3。因此,可以通过感测振动方向和径向方向之间的角度来确定该角度d1d3。
64.如果传感器在校准位置测量期间处于该位置,则经由加速度计8如上所述获得的角度d1d3可以存储为轨迹数据的一部分并且用于确定机舱定向。如果传感器在校准位置测量期间在中心平面7上,并且随后移动距离d2,则如上所述经由加速度计8获得的角位置(角d1d3)可用于将校正应用于机舱定向测量,如下所述。
65.具体地,然后可以确定振动方向34和径向方向之间的校正角δ,并且该校正角δ用于将校正应用于机舱定向测量。校正过程在图3c中示出。图3c对应于图2b,除了gnss传感器14已移动距离d2。测量振动的方向39,测量线17a和39之间的校正角δ;测量线17a和15之间的角度θ;然后将校正的机舱定向测量值获得为θ-δ。
66.现在转向图4,可以获得指示多于一个轨迹16、18的轨迹数据。因此,对于给定的定向,gnss传感器14可根据机舱3所经历的推力来测量不同的位置。
67.在机舱3经历可忽略的推力的第一场景中,gnss传感器14可以通过测量第一系列的校准位置来获得第一组轨迹数据。第一组轨迹数据指示第一轨迹16。
68.在机舱3经历推力20的第二场景中,gnss传感器14通过测量第二组校准位置来获得第二组轨迹数据。第二组轨迹数据指示第二轨迹18。在轨迹18上的每个位置处,推力的大小相同,但是推力的方向不同。轨迹16、18可以是以偏航轴12为中心的同心圆。
69.可以看出,第一和第二轨迹16、18都是圆形,其中第二轨迹18具有比第一轨迹16更大的半径。这是因为当机舱3经历推力20时,承载机舱3的塔架2弯曲。这导致机舱和gnss传感器14移动。取决于推力20来自哪个方向以及机舱3面向哪一个方向,塔架2将沿不同方向弯曲。
70.然后可以用gnss传感器14来测量新位置;并且基于所存储的两个圆16、18的轨迹数据来确定机舱的定向。这可以以多种不同方式来完成。例如,如果新位置落在圆圈16、18中的一个上,则该圆圈的轨迹数据可以用于确定机舱定向;并且如果新位置没有落在圆圈16、18中的一个上,则可以选择最接近的圆。例如,对于新位置(x1,y1)和(x2,y2),查找表中所选择的最接近校准位置可以在较大(高推力)圆18上,并且对于位置(x3,y3),查找表中所选择的最接近校准位置可以在较小(低推力)圆16上。
71.可以通过在高风速的时间期间进行校准测量并规律地更新圆直到测量到最高半径圆,来随时间测量较大的圆18。典型的风力涡轮机的峰值推力可以是相当低的风速(例如9m/s),因此最大可能的圆应当被相当快地测量。
72.在该示例中,仅测量两个圆:与低(或零)推力相关联的圆16和与最大推力相关联的圆18。替代地,可以测量一个或多个另外的圆:例如,圆16、18之间的并且与中等推力相关联的第三圆。如果测量较高数量的圆圈,则新位置更可能落在它们中的一个上(或接近于它们中的一个),使得来自查找表的机舱定向的估计可能更准确。
73.图5示出了具有由机舱3承载并且在前后方向上间隔开的两个gnss传感器114、214的实施例。在该实施例中,获得轨迹数据,轨迹数据基于由每个gnss传感器114、214测量的
相应系列的校准位置。轨迹数据可以包括两个查找表。每个查找表对应于由相应轨迹16a、16b上的gnss传感器114、214中的一个测量的一系列校准位置。gnss传感器114、214位于不同的轨迹16a、16b上,因为它们处于距偏航轴12不同的距离。
74.在存储轨迹数据之后,测量每个gnss传感器114、214的新位置。将这些新位置与存储的轨迹数据进行比较,以确定机舱3的定向。更具体地,每个新位置可以被输入到查找表中,该查找表对应于获得新位置的gnss传感器114、214。
75.图6示出了具有由机舱3承载并且在左右方向上间隔开的两个gnss传感器314、414的实施例。在此实施例中,gnss传感器314、414两者测量相同系列的校准位置,因为它们位于彼此相同的轨迹上。这是因为gnss传感器314、414与偏航轴12等距。因此,所获得的轨迹数据通常指示包括单个圆的轨迹16,gnss传感器314、414位于该单个圆上。
76.如关于先前实施例所讨论的,存储轨迹数据,并且在存储轨迹数据之后,测量每个gnss传感器314、414的新位置。基于所存储的轨迹数据和所测量的新位置来确定机舱3的定向。
77.多个gnss传感器的使用提供了提供机舱的定向的更准确、更可靠的指示的优点。
78.现在转到图7,示出了具有两个转子-机舱组件(rna)的风力涡轮机。每个rna包括相应的机舱3a、3b,机舱3a、3b承载相应的gnss传感器514、614。所述rna围绕共同的偏航轴112旋转。两个gnss传感器514、614与偏航轴112等距,因此当rna被偏航时,它们遵循相同的轨迹116。
79.如前所述,基于由每个gnss传感器514、614测量的一系列校准位置获得轨迹数据。在gnss传感器514、614位于相同轨迹116上的情况下,可以仅针对gnss传感器514、614中的一者测量一系列校准位置,且对于另一传感器不测量这些位置以避免冗余。存储轨迹数据。
80.如之前所讨论的,在存储轨迹数据之后,测量每个gnss传感器514、614的新位置。然后基于所存储的轨迹数据和所测量的新位置来确定机舱3的定向。
81.尽管以上已经参考一个或多个优选实施例描述了本发明,但是应当理解,在不脱离如所附权利要求中限定的本发明的范围的情况下,可以进行各种改变或修改。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
