1.本发明涉及用于控制风力涡轮机的方法、被布置用于控制风力涡轮机的方法的风力涡轮机控制器、包括被布置用于控制风力涡轮机的方法的风力涡轮机控制器的风力涡轮机、以及风力涡轮机阵列,其中,至少第一风力涡轮机包括风力涡轮机控制器。
背景技术:
2.为了满足巴黎协定提出的1.5摄氏度气候稳定目标,在未来的几年中需要大量减少化石燃料发电。为了替代这种发电能力,需要大量增加例如太阳能和风能的可再生能源。
3.大规模开发风能的最有效的方法是通过在所谓的风电场中在陆地或海上放置单独的风力涡轮机。这些风电场包括多个通常是相同类型的风力涡轮机,这些风力涡轮机在一定区域上分开,并且通常共享公共基础设施,从而降低涡轮机的总体资本运营费用,而且允许高效地维护风电场,同时限制陆地和/或海域的使用。
4.然而,当风力涡轮机从风中摄取能量时,在涡轮机的下游生成尾流。在风力涡轮机的尾流中,(平均)风速降低并且(平均)湍流增加。这种不利的影响位于更下游的涡轮机,因为降低的风速导致产生较低的能量,并且增加的湍流增加了下游涡轮机所承受的疲劳载荷。
5.当流进一步向下游行进时,尾流扩散,从而与周围的自由流风混合,使得尾流随着时间(从而随着距离)而朝向自由流状态恢复。由于风电场的布置是至少在可用区域、安装功率和基础设施成本之间的折衷,因此将风力涡轮机间隔在尾流效应最小化的这种相互距离处在经济上是非常没有吸引力的。
6.为了优化风电场水平的功率输出,与单独风力涡轮机水平相反,风电场控制研究聚焦于于稳态优化控制,其也被称为所谓的轴向诱导控制或降额方法,其中,对布置在风电场上游的风力涡轮机进行控制,以降低其功率产生(即,降额其性能),使得布置在下风处的风力涡轮机能够从经过涡轮机的风中摄取稍微更多的能量。目标是找到最佳静态控制参数,而不管风和涡轮机的动力性能如何。然而,发现与所有涡轮机以其各自的最佳状态运行的稳态“贪婪”策略相比,这种静态方法的潜在功率增益甚至可能导致更低的总功率产生。
技术实现要素:
7.本发明的目标(可能还有其他目标)可以是获得用于控制风力涡轮机的方法,该方法减少风力涡轮机下游的尾流效应,这至少部分地缓解了至少一个上述问题。
8.除了其它目标以外,该目标可至少部分地通过一种控制风力涡轮机的方法来满足,该风力涡轮机包括转子,该转子包括至少第一叶片,该方法包括以下步骤:在第一叶片旋转的同时通过在第一桨距角与第二桨距角之间随着时间动态地改变第一叶片的桨距角而随着时间改变第一叶片的诱导因子,特别是径向诱导因子,其中,第一桨距角不同于第二桨距角,并且其中,桨距角随着时间的动态改变使得叶片处于第一桨距角和第二桨距角的第一叶片的相应旋转位置及时位移,使得在风力涡轮机下游形成的尾流的位置和/或方向
相对于风力涡轮机的转子动态地变化。
9.在本发明的另外方面中,代替相对于风力涡轮机的转子动态地改变在风力涡轮机下游形成的尾流的位置和/或方向,还可以控制桨距角随着时间的动态改变,使得在风力涡轮机下游形成的尾流的形状(而不是位置和/或方向)相对于风力涡轮机的转子动态地变化。变化的形状可以例如对应于具有大致恒定形状的尾流,该尾流随着时间沿着转子的轴线旋转,优选地以(显著)低于转子转速的转速旋转。
10.一种风力涡轮机,包括转子,该转子包括至少一个叶片,但通常包括多个叶片,例如两个或三个叶片,以将风的动能转换成机械能,该机械能由发电机转换成电能。具体地,风速使叶片旋转,这又为发电机提供动力。然而,旋转的叶片(有效地形成转子盘)使风减速并且导致在涡轮机后面形成尾流。尾流内的风具有比在转子盘周围经过的未穿过涡轮机叶片的风更慢的平均速度和更高的平均湍流。而且,尾流中的风速相对于不受转子影响的风速更慢导致尾流膨胀,即尾流的直径膨胀超过转子的直径。通常,尾流限定了受涡轮机叶片影响的流体(例如空气)的体积。布置在该尾流下游(下风处)的任何涡轮机仅能使用相对较慢的风速来转动其叶片,从而导致下风处涡轮机的更低功率输出。另外,由于增加的平均湍流,下风处涡轮机也将经历更多的疲劳载荷,从而不利地影响其寿命。
11.通过将动能从尾流周围的风传递到尾流本身中,尾流中的风和周围空气的相对速度和湍流差随着时间缓慢地减小。这个过程被称为湍流混合。因为湍流混合自然发生,所以从风传递到风力涡轮机的动能将最终被替换。然而,将动能传递到尾流中所需的距离取决于风速。因此,定位为挨着的第一涡轮机与第二涡轮机之间的距离(通常小于10个转子直径,即10d)可能不足以在风到达布置在第一风力涡轮机下游的第二涡轮机之前返回由第一涡轮机获取的动能。
12.通常,诱导因子通过将转子平面上游的风速v
∞
与转子平面(即,转子盘)处的风速vd的差值除以上游风速v
∞
来确定,使得:
[0013][0014]
而且,各个叶片可具有与其相关联的单独的诱导因子。叶片的诱导因子可以通过使叶片相对于风俯仰(即,使叶片围绕其纵轴旋转,使得叶片的横截面与转子平面之间的角度变化)来改变。通过改变叶片的诱导因子,可以局部地改变离开转子平面的风的速度和方向,因此实际上改变尾流本身的位置。
[0015]
通过也及时地位移叶片处于第一桨距角并且优选地处于第二桨距角的第一叶片的相应旋转位置,叶片的诱导变化(即,变化的诱导因子)随着时间发生在转子平面中的不同角位置处。因此,在风力涡轮机下游形成的尾流的位置也相对于风力涡轮机的转子动态地变化。尾流位置的这种变化增加了湍流混合,使得将动能传递到尾流中所需的距离减小,并且可布置在风力涡轮机下游的任何涡轮机从而受到尾流的影响小得多。在多个叶片的情况下,至少第一叶片的桨距角优选地布置为相对于其它叶片单独地改变。
[0016]
在可选实施例中,该方法包括以下步骤:在转子上施加偏航力矩和倾斜力矩,以便通过将桨距角的周期性变化叠加在风力涡轮机的第一(例如共同的)叶片桨距角上以便动态地改变第一叶片的桨距角来获得强制的尾流混合。因此,该方法的益处在于,通过仅对现有的用于风力涡轮机的控制方法施加微小的变化(即,通过将周期性变化叠加到桨距角上)
就可以获得改善的尾流混合。
[0017]
在该方法的可选实施例中,随着时间改变第一叶片的诱导因子的步骤还包括:根据预定周期函数动态地改变第一叶片的桨距角,并且其中,预定周期函数被定义为使得及时位移叶片处于第一桨距角和第二桨距角的第一叶片的相应旋转位置。周期性变化(即,根据预定周期函数)是一种确保以下内容的简单且有效的方式:及时位移叶片处于第一桨距角和第二桨距角的第一叶片的相应旋转位置,从而使得能够动态地改变在风力涡轮机下游形成的尾流的位置和/或方向。
[0018]
在方法的可选实施例中,预定周期函数被定义为使得叶片在转子平面中的旋转位置从旋转到旋转位移,在该旋转位置处,叶片处于第一桨距角。由于在转子平面中的不同角位置处发生的叶片的诱导变化,作用在叶片上的合成推力也将随着诱导变化而变化,使得整个转子经历推力的取向的周期性变化,而不显著改变力本身的幅度。因此,仅经历推力的相对小的变化,使得推力不会太多地增加在涡轮机上诱导的疲劳载荷。特别地,如果从旋转到旋转的位移相对缓慢,例如每次旋转小于180
°
(度),优选每次旋转小于90
°
,更优选每次旋转小于45
°
,则周期性地改变推力取向是不导致涡轮机疲劳载荷显著增加的低频力变化。
[0019]
在一个可选实施例中,转子包括第二叶片,该方法包括以下步骤:通过在第一桨距角与第二桨距角之间动态地改变第二叶片的桨距角而随着时间改变第二叶片的诱导因子,其中,第一叶片处于第一桨距角的时间不同于第二叶片处于第一桨距角的时间。改变第一叶片的桨距角可能导致转子中的一些不平衡。通过如在此所述地也动态地改变第二叶片的桨距角,可以至少部分地补偿不平衡。
[0020]
在一个可选实施例中,转子包括第二叶片,该第二叶片优选地布置为使得其桨距角可以相对于第一叶片的桨距角单独地改变或独立于第一叶片的桨距角而改变,并且其中,该方法优选地包括以下步骤:通过根据预定周期函数动态地改变第二叶片的桨距角而随着时间改变第二叶片的诱导因子,并且其中,第二叶片的桨距角的动态改变与第一叶片的桨距角的动态改变相差相位偏移。通过也根据预定周期函数改变第二叶片的诱导因子,但是相对于第一叶片具有相位偏移,第一叶片和第二叶片的桨距角(以及因此它们的诱导因子)不同时处于它们的最大值或最小值。如果诱导因子将同时处于其最大值或最小值,则涡轮机将有效地降额,并且其功率产生将降低,因为转子的诱导因子作为总数将被改变,而不是产生局部变化,局部变化对总转子的诱导因子并因此对涡轮机的功率输出仅具有小的影响。
[0021]
相位偏移可选择为大致等于转子平面中第一叶片与第二叶片之间的交叉角。例如,对于双叶片涡轮机,交叉角为近似180
°
。通过也具有大约180
°
的相位偏移,第一叶片的最小诱导因子同时由第二叶片的最大值补偿,使得对于整个转子,总诱导因子的变化是最小的。例如,对于三叶片涡轮机,交叉角为近似120
°
。通过也具有大约120
°
的相位偏移,第一叶片的最小诱导因子由其它两个叶片近似地补偿。
[0022]
根据方法的可选实施例,通过对在非旋转参考坐标系中定义的时间变化偏航函数、或对在非旋转参考坐标系中定义的时间变化倾斜函数、或对时间变化偏航函数和倾斜函数的组合执行逆多叶片坐标(mbc)变换,来获得桨距角随着时间的动态改变。多叶片坐标(mbc)通常用于将叶片上的力矩从局部叶片坐标系变换到非旋转或地面固定惯性坐标系,以确定例如涡轮机塔架上的载荷。通过在非旋转坐标系中定义能够分别水平地和/或竖直
地操纵尾流的时间变化偏航和/或倾斜信号,并且执行逆mbc变换,信号被变换到局部叶片坐标系,从而获得至少第一叶片的桨距角的动态改变。
[0023]
在本发明的实施例中,时间变化偏航函数是周期偏航函数和/或时间变化倾斜函数是周期倾斜函数。通过执行逆多叶片坐标(mbc)变换,获得了预定的周期函数,使得随着时间动态地改变桨距角是根据预定的周期函数动态地改变桨距角。因此,可以实现相对简单的函数,以便实现上面给出的期望效果。优选地,周期倾斜函数和/或周期偏航函数是具有预定频率的正弦函数。从而,逆变换导致单个叶片的周期桨距函数,由此,周期桨距函数也是正弦函数或正弦函数的叠加,使得获得平滑的桨距信号。由于尤其是实用规模的风力涡轮机的各个叶片的尺寸和重量,优选平滑的桨距信号,因为从而没有通过桨距机构引入突然的、冲击状的激励,因为这些激励将激励风力涡轮机结构的所有种类的不需要的动力学并且在涡轮机及其部件上引入增加的载荷。
[0024]
在方法的一个实施例中,预定周期函数包括具有第一频率的第一正弦函数,其中,第一频率不同于转子的旋转频率或其倍数。替代性地,预定周期函数包括第一正弦函数和具有第二频率的第二正弦函数的叠加,其中,第一频率和第二频率不同。如上所述,正弦函数或正弦函数的叠加给出平滑的周期性桨距角变化。
[0025]
第一频率的值或第二频率的值可以选择为大致等于随着预定频率增加或减小的转子的旋转频率,该预定频率是小于旋转频率的非零频率。从而,至少第一叶片的桨距角根据预定周期函数的动态改变与涡轮机的旋转频率相比是相对缓慢的变化。因此,这些低频信号给出缓慢且平滑的周期性桨距角变化,该变化不期望导致涡轮机上的载荷的显著增加,而同时获得导致尾流混合增加的尾流的位置和方向的相对缓慢的变化。由于预定频率是小于旋转频率的非零频率,因此如上所述获得了改善尾流混合的效果,同时与例如用于减轻载荷的现有单独桨距控制方法相比,叶片的俯仰动作仅略微增加,使得桨距系统、尤其是桨距轴承上的额外载荷受到限制,桨距轴承通常是桨距系统的最疲劳关键部分。
[0026]
优选地,预定频率至少根据转子的直径、转子的转速和/或在风力涡轮机的上游确定的流入风速来确定。因此,预定周期函数被定制成适应不同的运行条件或涡轮机尺寸,使得对于不同的运行条件和涡轮机尺寸可以获得增加的尾流混合。替代性地或另外地,预定频率优选地至少根据斯特鲁哈尔数来确定,其中,斯特鲁哈尔数优选地在0.05至1.0之间,更优选地在0.15至0.55之间,并且甚至更优选地在0.2至0.3之间,最优选地在0.25左右。
[0027]
周期倾斜和/或偏航函数的预定频率可以用称为斯特鲁哈尔数的无量纲数确定:
[0028][0029]
该无量纲数限定流入风速u
∞
、涡轮机转子直径d和预定频率f之间的关系。基于使用模拟程序(模拟器for风电场应用(sowfa))的计算机模拟,对于层流条件下的不同频率,估计最佳斯特鲁哈尔数优选在0.05至1.0之间,更优选在0.15至0.55之间,甚至更优选在0.2至0.3之间,最优选在0.25左右。发现以根据这种斯特鲁哈尔数确定的预定频率应用任何实施例都给出了极好的尾流混合。
[0030]
在该方法的一个可选实施例中,第一桨距角与第二桨距角之间的差值为30
°
或更小,优选20
°
或更小,更优选10
°
或更小,最优选在2
°
至8
°
之间。桨距角的变化太大将导致涡轮机的性能降低,而变化太小将不会导致所需量的尾流混合。在上述给定范围内发现这两
者之间的良好折衷。
[0031]
在本发明的第二方面中,提供了一种被布置用于控制风力涡轮机的风力涡轮机控制器,该风力涡轮机包括转子,该转子包括至少第一叶片,其中,控制器被布置用于通过根据预定周期函数动态地改变第一叶片的桨距角使得第一叶片的桨距角在第一叶片旋转的同时在第一桨距角与第二桨距角之间周期性地变化,来随着时间改变第一叶片的诱导因子,其中,第一桨距角不同于第二桨距角,并且其中,预定周期函数被定义为使得叶片处于第一桨距角和第二桨距角的第一叶片的相应旋转位置被及时位移,使得控制器被布置用于相对于风力涡轮机的转子动态地改变在风力涡轮机的下游形成的尾流的位置。因此,将控制方法的优点应用于控制器中。
[0032]
在本发明的第三方面中,提供了一种风力涡轮机,包括转子,该转子包括至少第一叶片,风力涡轮机还包括风力涡轮机控制器,该风力涡轮机控制器被布置用于根据给出的任意实施例的控制风力涡轮机的方法。因此,获得了一种风力涡轮机,其能够改善在涡轮机下游形成的尾流中的混合。
[0033]
在另外方面,提供了一种至少两个风力涡轮机的阵列,其中,对于给定的风向,第二风力涡轮机至少部分地布置在第一风力涡轮机的尾流的下游,其中,第一风力涡轮机和第二风力涡轮机包括转子,该转子包括至少第一叶片,并且其中,至少第一风力涡轮机包括风力涡轮机控制器,该风力涡轮机控制器被布置用于根据给出的任何实施例的控制风力涡轮机的方法。因此,获得了一种涡轮机阵列(例如风电场),其中,至少一个涡轮机被构造用于改善在涡轮机下游形成的尾流中的混合,使得可以进一步增加风力涡轮机阵列(即风电场)的电能产生。
附图说明
[0034]
本发明进一步通过以下附图所例示,所述附图示出了根据本发明的用于控制风力涡轮机的方法的示例性实施例,并且不旨在以任何方式限制本发明的范围,附图中:
[0035]-图1a示意性地示出了包括三叶片转子的水平轴风力涡轮机。
[0036]-图1b示意性地示出了俯仰的叶片。
[0037]-图2示意性地示出了包括不同部件的风力涡轮机的机舱和转子。
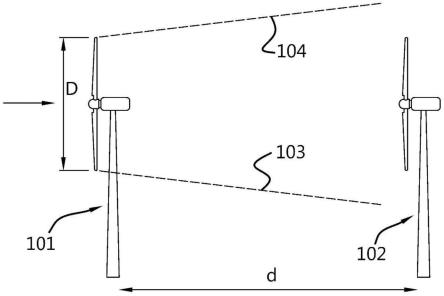
[0038]-图3示意性地示出了两个风力涡轮机的阵列,其中,第二风力涡轮机布置在第一风力涡轮机的尾流的下游。
[0039]-图4示出了包括控制风力涡轮机的方法的实施例所包括的不同步骤的流程图。
[0040]-图5示出了表示在基于不同的斯特鲁哈尔数(strouhal number)控制的涡轮机之后的不同距离处的平均尾流速度的曲线图。当应用贪婪控制时,通过除以各个位置处的尾流速度来对速度进行归一化。
[0041]-图6a和图6b示意性地示出了对于分别用该方法的两个不同实施例控制的涡轮机在一个激励周期t期间的不同时刻的尾流的位置。
[0042]-图7示出了由使用贪婪控制方法控制的涡轮机生成的尾流与由使用根据本发明的控制风力涡轮机的方法的实施例控制的涡轮机生成的尾流之间的差异。
具体实施方式
[0043]
图1a示意性地示出了典型的三叶片水平轴风力涡轮机1的布局。该风力涡轮机包括位于基座3顶部的塔架2。注意,这种风力涡轮机可以布置在陆地(例如陆上)和海洋(例如海上)。在后一种情况下,基座3将通常是海上基座,例如是安装到海床中的海床固定结构(例如单桩、三脚架、导管架),或者替代性地是漂浮基座,其中将浮体固定到海床,以将其保持在适当位置。在陆上涡轮机的情况下,这种基座3通常是所谓的重力基座,其包括重的混凝土体,以保持风力涡轮机1固定到地面。
[0044]
与转子5联接的机舱4布置在塔架2的顶部。转子5包括三个叶片51、52、53,但是任何数量的叶片都是可能的,例如也可以应用一个、两个或四个叶片。叶片51、52、53固定到转毂54。机舱4围绕与塔架2大致平行或重合且大致垂直于地平面的竖轴i的旋转被称为偏航旋转。偏航角可以根据风向来限定,在这种情况下,非零偏航角意味着在转子轴线ii的方向与风向w之间存在错位。转子5布置为围绕转子轴线ii旋转,这种旋转通常称为方位角旋转。此外,叶片51、52、53被布置为围绕其相应的纵轴iii旋转,该旋转被称为桨距旋转(pitch rotation),并且叶片51、52、53的横截面的中心轴线v相对于转子5的旋转平面iv之间的角度称为桨距角(pitch angle)。图1b示出了相对于转子平面iv以桨距角θ1俯仰的第一叶片51的横截面的中心轴线v。
[0045]
图2示意性地示出了风力涡轮机1的机舱4和转子5,其中,不同的部件布置在机舱4中。机舱4容纳传动系6,该传动系6可以包括用于生成电能的发电机61、布置在高速轴63与低速轴64之间的齿轮箱62,其中,低速轴64连接到转子5,并且高速轴63将旋转从齿轮箱62的输出传递到发电机61。注意,在所谓的直接驱动风力涡轮机中,转子通常通过主轴或低速轴直接连接到发电机。在这些类型的风力涡轮机中,不需要齿轮箱62和高速轴63。
[0046]
此外,机舱4通常还包括偏航机构7,其用于使机舱4围绕塔架2、特别是竖轴i偏航。偏航机构7可包括多个偏航马达71,其附接到机舱4的基部,并且包括用于朝向输出驱动小齿轮降低转速的齿轮装置,输出驱动小齿轮可与内侧上具有齿的齿轮缘72啮合,齿轮缘又连接到塔架2的顶部。此外,桨距机构8(至少部分地)包括在转毂54中,其中,桨距机构8被布置为用于使叶片51、52、53俯仰。在涡轮机1的当前实施例中,桨距机构8包括三个桨距驱动器81、82、83,其被布置为驱动相应叶片51、52、53的叶片根部55、56、57的端部。桨距驱动器81、82、83布置为单独地驱动相应叶片51、52、53的桨距旋转,使得叶片51、52、53可在任何给定时间都具有不同的桨距角。这种桨距机构8也称为独立桨距机构,并且控制独立桨距机构以便使涡轮机上的疲劳载荷最小化称为独立桨距控制(ipc)。
[0047]
图3示意性地示出了两个风力涡轮机的阵列,其中,风向w使得第二风力涡轮机102定位在第一风力涡轮机101的尾流的下游。尾流可以被认为是具有增加的湍流的降低(平均)风速的区域,如虚线103、104之间所示。由风力涡轮机101引起的尾流将缓慢地与周围(未受影响的)风场混合,并且由于这种混合,尾流效应将随着与涡轮机的距离的增加而减小。涡轮机101、102通常以转子直径的三倍至十倍(3d-10d)的相互距离d放置,其中,与仅三倍距离的相互距离相比,转子直径的十倍的相互距离将明显地导致更低的尾流效应(例如降低的功率输出和减小的振动),从而导致不同风力涡轮机部件上的减小的诱导疲劳载荷。然而,如上所述,风电场通常必须在有限空间内开发,使得较长的相互距离可能导致整个场的功率输出降低,从而导致所生成的能量的成本较高。因此,有益的是能够增加尾流混合并
减小尾流的长度和/或强度,使得涡轮机可以放置在更小的距离处,同时仍然以更少的诱导疲劳载荷提供更高的功率输出。
[0048]
图4示出了用于控制风力涡轮机的控制方法的实施例的步骤的框图或流程图200。在步骤201中,定义周期倾斜和偏航函数2011、2012,其中,周期倾斜和偏航函数2011、2012被定义为具有共同的预定频率f的正弦函数,并且其中,周期倾斜和偏航函数2011、2012具有优选的90
°
或270
°
的某一相位偏移。因此,在该称为螺旋ipc的特定实施例中,倾斜和偏航自由度都被激发,但是相位偏移为π/2rad(90
°
)。这将导致转子盘(如在非旋转坐标系中看到的)上的随着时间旋转的力矩,从而每t=1/f秒完成一次旋转,并且导致螺旋形尾流92,如在图7中看到的。
[0049]
周期倾斜和偏航函数2011、2012的预定频率f可以相对于流入风速u
∞
和基于被称为斯特鲁哈尔数的无量纲数的涡轮机转子直径d来确定:
[0050][0051]
最佳的斯特鲁哈尔数优选在0.05至1.0之间,更优选在0.15至0.55之间,甚至更优选在0.2至0.3之间,最优选在0.25左右。通过在模拟程序(风电场应用的模拟器(simulator for wind farm application,sowfa))中对于层流条件下的不同频率进行网格搜索,获得了该最佳值的估计。在被激励的涡轮机之后的不同距离处的所得平均尾流速度在图5中示出,其示出了表示在以不同频率激励的涡轮机之后的不同距离处的平均尾流速度的曲线图。当应用贪婪控制时,通过除以各个位置处的尾流速度来对速度进行归一化。图5示出,对于距转子的多个不同距离(其中该距离以多个转子直径d(3d、5d和7d)给出),峰值在st=0.25左右。可以基于这些结果选择斯特鲁哈尔数,以便确定激励频率。此外,桨距幅度β优选为15
°
或更小,更优选10
°
或更小,甚至更优选5
°
或更小,最优选在2
°
至4
°
之间,因为太大桨距幅度的(优选)正弦桨距变化将导致涡轮机上的载荷增加。
[0052]
应用逆多叶片坐标(inverse multiblade coordinate,mbc)变换步骤(203),以便获得相应叶片51、52、53的桨距角θ1、θ2、θ3的周期性变化。mbc变换在非旋转参考坐标系中解耦叶片载荷,或换句话说:将叶片载荷投影在非旋转参考坐标系中,并且是在例如目的在于降低风力涡轮机的疲劳载荷的单独桨距控制方法中使用的变换。转子速度相关的每转n次(np)载荷谐波被转换为稳态贡献,从而简化控制器设计。总结了实现变换的等式。所测量的平面外叶片根部弯曲力矩m(t)∈rb被提供给正向变换,从而将旋转叶片力矩变换到非旋转参考坐标系中(例如也如步骤207所示):
[0053][0054]
其中
[0055]
[0056]
其中,是谐波次数,b∈z
是叶片的总数,并且且是叶片的方位角,其中,ψ=0
°
指示竖直直立位置。共同模式m0表示累积的平面外转子力矩,m
t
和my分别表示固定的坐标系和与方位角无关的倾斜力矩和偏航力矩(2071、2072)。后两个提到的分量通常用于疲劳载荷降低的目的。
[0057]
通过将逆mbc变换应用于(步骤201的)非旋转信号,这在旋转(即叶片)坐标系中产生可实现的单独桨距贡献。
[0058][0059]
其中
[0060][0061]
其中,θ
0,n
、θ
t,n
和θ
y,n
分别是固定坐标系共同、倾斜和偏航桨距信号,并且ψo,n是各个谐波的方位角偏移。
[0062]
现在采用使用例如桨距驱动器81、82、83单独驱动转子叶片的桨距的可能性,以便提高尾流恢复效果,或者换言之,增加尾流混合。通过单独地俯仰叶片,可以将涡轮机的推力以及随后的功率产生控制为接近贪婪最优化(步骤205)。
[0063]
作为示例,在风电场应用模拟器(sowfa)中评估所提出的控制策略,该风电场应用是由美国国家可再生能源实验室(national renewable energy laboratory,nrel)开发的高保真模拟环境。sowfa是用于湍流大气中的流体动力学及其与一个或多个风力涡轮机的相互作用的大涡求解器,其考虑了科里奥利(coriolis)力和浮力效应。涡轮机被建模为致动器盘或致动器线。在本著作中,sowfa适于允许为各个单独的叶片指定不同的桨距设定点。该著作中的模拟是中性大气边界层(atmospheric boundary layer,abl),其中,通过所谓的前体模拟生成流入。下面列出了模拟设置的几个特性。
[0064]
sowfa中的数值模拟方案:
[0065][0066]
作为根据本发明的控制方法的基线情况,将使用所谓的贪婪控制策略。该方法表示忽略了风力涡轮机之间的相互作用,因此所有涡轮机都在其各自的最佳状态下运行。这
暗示转子垂直于风偏航,并且对于低于额定的风力条件,控制桨距角和发电机转矩,使得实现从风中的最佳功率提取。这种情况用作良好的基线,因为它仍然是风电场中通常实现的策略。利用这种策略,上游涡轮机的功率产生是最佳的,但是尾流不足相对较高,从而导致下游机器的较低性能。
[0067]
在根据本发明的实施例的控制方法中,根据桨距角θ1、θ2、θ3的周期性变化来单独地俯仰叶片用于通过单独地改变叶片的诱导因子并从而改变涡轮机的偏航迎角来刺激尾流混合。如步骤207中看到的,该控制方法通过应用mbc变换能够在转子上施加偏航和倾斜力矩,如上所述。这些偏航和倾斜力矩207随后可导致强制尾流混合,其中功率和尾流速度的变化较小。这通过将桨距角θ1、θ2、θ3的周期性变化叠加(步骤204)在风力涡轮机的共同叶片桨距角上来实现。
[0068]
这些投影的载荷信号首先通过使用上述mbc变换被变换到旋转坐标系中,以获得所实现的桨距角。对于相同的正弦倾斜和偏航信号(其中偏航信号具有90
°
的相位延迟),根据常用的三角公式,这导致具有不同频率的正弦桨距信号β:
[0069]
βb=cos(ψb(t))cos(2πft) sin(ψb(t))sin(2πft)
[0070]
ꢀꢀ
=cos(ψb(t) 2πft)
[0071]
ꢀꢀ
=cos(2πfht φb),
[0072]
其中ψb是叶片b的方位角位置,fh是新的螺旋激励频率,是叶片b的相位偏移。因此可以确定fh=f fr,其中fr是转子的旋转频率。对于nrel 5mw参考涡轮机,在u
∞
=8m/s的转子速度等于fr≈9.5rpm≈0.158hz。因此,被称为螺旋ipc的实施例的桨距频率fh将稍微高于叶片的旋转频率;对于st=0.25,fh≈0.174hz。
[0073]
例如,如果周期倾斜函数2011被设置为零(偏航ipc),或者替代地周期偏航函数2012被设置为零(倾斜ipc),则发现替代实施例。在这种情况下,逆mbc(步骤203)和常用三角公式导致桨距角θ1、θ2、θ3的周期性变化,其中,该周期性变化然后变为两个正弦信号(具有第一频率fh=f fr的第一正弦信号和具有第二频率fh=f
r-f的第二正弦信号)的叠加。
[0074]
例如,在图6a和图6b中示意性地示出了将周期性变化的桨距角θ1、θ2、θ3应用于相应的叶片51、52、53的效果。在图6a中,示出了对于被称为倾斜ipc的实施例在一个周期t=1/f期间的不同时刻的尾流9的位置(即尾流的中心的位置,参见尾流的横截面)的示意性表示。在倾斜ipc实施例中,周期偏航函数2012被设定为零,并且具有预定频率f的正弦倾斜函数用于确定改变各个叶片的桨距角所用的预定周期函数。尾流9的位置在周期t的过程中在相对于转子5的上部位置与下部位置(如垂直于转子平面iv看到的)之间动态地变化,其中t=1/f。
[0075]
在图6b中,示出了由于螺旋ipc导致的尾流9的位置的最终变化。示出了尾流9在一个周期t=1/f期间的不同时刻相对于转子的位置(即尾流中心的位置,在尾流的横截面中看到的)。尾流9的位置动态地变化,如垂直于转子平面iv看到的。尾流9从t=0时相对于转子5的上部位置环绕到t=t/4时的最右侧位置、到t=t/2时的下部位置、t=3t/4时的最左侧位置、回到t=t时的上部位置,从而在周期t的过程上完成一圈,其中t=1/f。如图7所示和下面所述,螺旋ipc实施例导致围绕转子轴线的螺旋形尾流,因此得到其名称。这些模拟已经在(相同的)倾斜与偏航信号之间具有90
°
的相位偏移的情况下执行,从而导致螺旋围绕转子轴线的顺时针(cw)螺旋运动,如从平行于转子轴线的逆风方向看到的。在倾斜与偏
航信号之间的270
°
的相位偏移的情况下,获得螺旋围绕转子轴线的逆时针(ccw)螺旋运动。
[0076]
此外,尾流不仅可以在不同的位置处生成,而且尾流可以另外地或替代性地瞄准不同的方向。
[0077]
已经执行评估螺旋、倾斜和偏航ipc实施例对涡轮机的功率产生的影响以及sowfa求解器中的作为结果的尾流不足1000s模拟。这些模拟的结果示于下表中。
[0078][0079]
该表示出了sowfa中针对控制方法的顺时针和逆时针螺旋ipc、倾斜ipc和偏航ipc实施例的模拟结果,其中顺时针(cw)和逆时针(ccw)螺旋ipc实施例已经用2.5
°
和4
°
的桨距幅度β进行评价。结果是在功率产生、功率和推力的变化以及尾流恢复方面给出的。所有结果都是相对于贪婪控制的基线情况示出的。
[0080]
新的控制方法导致与基线相比测试的实施例的仅5.3%的最大功率损耗。另一方面,尾流中的能量的量增加了高达26%。新的控制方法还导致对于所有测试的实施例的功率变化的减小,这意味着获得更恒定的功率产生,这对于电网稳定性是有益的。另外,功率的变化和推力的变化也减小,从而证明该方法不仅在风电场设置中具有优点,而且对于单个涡轮机也具有优点,其中,单个涡轮机旨在提供更稳定的功率输出(即较小的变化)并且减小由于推力引起的一些疲劳载荷(即推力的较小变化)。
[0081]
图7在左侧示出了风力涡轮机1,其包括转子5,该转子包括三个叶片51、52、53,由贪婪控制的基线情况控制。在涡轮机1的下游,示出尾流91,其中灰色部分暗示相对于周围空气的降低的风速。灰色调越暗,则降低越大。因此,可以看到尾流91即使在转子直径十倍(10d)的距离处也示出了很少的混合迹象。还示出了相对于转子平面iv成镜像的推力54。推力54的取向随着时间大致上保持静止(即其示出了大致上没有方向随着时间的变化)。注意,为了清楚地示出所得到的螺旋形尾流,基于均匀流入执行用于获得图7的模拟。
[0082]
图7的右部示出了使用控制方法的螺旋ipc实施例控制的相同的涡轮机1,其在涡轮机后面产生(旋转)螺旋形尾流92。由于该螺旋形尾流92,与周围空气的尾流混合增加,由此尾流更快地溶解。在近似5d的距离处,尾流效应已经显著地减小。从而,与更传统地控制的风力涡轮机相比,利用根据本发明的控制方法控制的风力涡轮机可以被放置得彼此更靠近,从而增加风电场的潜在功率产生。还示出了相对于转子平面iv成镜像的推力55。使用螺旋ipc实施例,当与推力54相比时,推力55实际上示出了相对于进入的风的轻微的取向变
化。可以看到,在操作期间,推力55的取向变化,并且实际上以与尾流92的初始部分(即原点)93的循环相同的步调沿着转子循环。这涉及如下事实:预定周期函数被定义为使得叶片在转子平面中的旋转位置从旋转到旋转位移,在该旋转位置处,叶片处于第一桨距角。
[0083]
如本文所定义的,当提及动态地改变在风力涡轮机下游形成的尾流的位置时,尾流的中心(即尾流在横截面中的几何中心,如图6a和图6b所示,相对于涡轮机的转子轴线方向上的假想线(即图1a中的线ii))的位置(即地点)实际上可以是动态改变的。此外,当提及动态地改变在风力涡轮机下游形成的尾流的方向时,尾流从涡轮机被操纵到的方向可动态地变化。
[0084]
本发明不限于所示的实施例,而是还扩展到落入所附权利要求的范围内的其它实施例。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
