1.本发明涉及轴向柱塞泵领域,尤其涉及一种轴向柱塞泵配流副油膜厚度间接测量方法。
背景技术:
2.轴向柱塞泵作为液压系统的核心动力元件之一,因其具有结构紧凑,单位体积输出功率大、额定压力高、流量大等诸多优势,在各种机械装备中得到广泛的应用。配流副是柱塞泵的关键摩擦副,由旋转缸体、固定配流盘和两者的间隙油膜组成。配流副的润滑状态会很大程度上影响轴向柱塞泵的工作效率和使用寿命。轴向柱塞泵配流副保持在合适的间隙油膜,能保障良好的润滑特性,有效提高泵的工作性能,延长泵的使用寿命。在实际工况下,由于缸体和配流盘的油膜厚度仅几个微米,且测量区域存在高压、高温以及油液污染等恶劣环境,所以对油膜厚度测量的要求比较高。
技术实现要素:
3.本发明的目的是针对现有技术的不足,提供一种轴向柱塞泵配流副油膜厚度间接测量方法,这种方法对泵的改动较小,通过信号提取方法,能够准确地获得真实工况下测试泵的缸体和壳体振动信号,能够较为准确地计算出配流副油膜厚度。
4.本发明的目的是通过以下技术方案实现的:
5.一种轴向柱塞泵配流副油膜厚度间接测量方法,具体包括如下步骤:
6.1)轴向柱塞泵作为测试泵,通过花键将测试泵连接电机,压力由测试泵出口管路中的节流阀控制;
7.2)在测试泵壳体和后端盖上安装振动传感器,在测试泵壳体上安装两组涡流传感器,然后进行同步测量,所述振动传感器测量测试泵壳体和后端盖的振动信号,所述涡流传感器测量测试泵缸体相对于壳体的振动信号;
8.3)通过采集到的壳体振动信号并结合采集到的缸体相对于壳体的振动信号,计算出缸体实际的振动;通过缸体的实际振动与后端盖振动信号计算出缸体配合端面和配流盘的位移,然后根据缸体配合端面和配流盘的位移计算出油膜的厚度。
9.步骤3)中计算油膜的厚度,包括以下步骤:
10.3.1)以测试泵轴向为参考建立世界坐标系,分别以壳体轴向、缸体轴向、后端盖轴向为参考建立运动坐标系;
11.3.2)分别通过壳体几何尺寸、缸体几何尺寸、后端盖几何尺寸计算得到各对应点在运动坐标系下的坐标(u,v,w),通过采集到的信号分别得到各对应点在世界坐标系下的坐标(x,y,z),将坐标带入坐标变换式解出各运动坐标系的运动情况;
12.3.3)通过三个缸体配合端面对应点构建缸体配合端面的方程,通过三个配流盘对应点构建配流盘的方程,得出缸体配合端面的轴向位移和配流盘的轴向位移;
13.3.4)缸体配合端面的轴向位移和配流盘的轴向位移的差值即为油膜的厚度。
14.在测试泵壳体上加工四个螺纹孔用于安装4个涡流传感器,每两个涡流传感器作为一组,采用双螺母固定。
15.在测试泵壳体上用胶水安装两个振动传感器。
16.在测试泵后端盖上用胶水安装两个振动传感器。
17.相对现有技术,本发明的有益结果是:
18.(1)通过信号提取的方法:缸体和配流盘真实的位移信号的精确测量保证了瞬态分析结果的准确性,使得测试的准确性提高。
19.(2)少量加工:直接在工作机上测试,使得测试简单,测试成本低。
20.(3)非接触的测量方法:减少试验设备对缸体运动的影响,保证真实的运动工况,可以用于实际工况的测量与监测。
附图说明
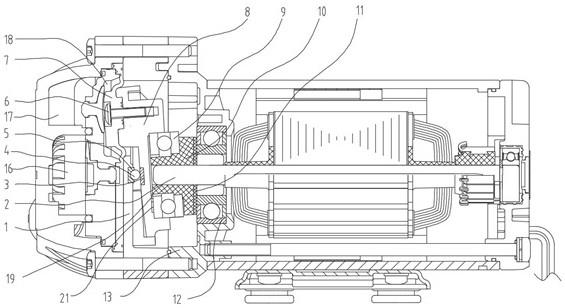
21.图1为测试泵的结构示意图;
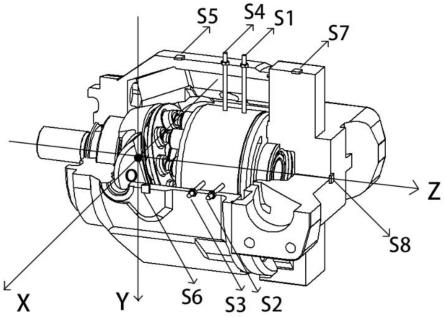
22.图2为涡流传感器的测试示意图;
23.图3为壳体的运动示意图;
24.图4为缸体的运动示意图;
25.图5为后端盖与配流盘运动示意图;
26.图6为油膜厚度示意图;
27.图7为构建缸体配合端面与配流盘示意图。
具体实施方式
28.为了使本发明所要解决的技术问题、技术方案以及有益结果更加清楚、明白,下面结合附图和实例,对本发明进行详细阐述。
29.本发明具体测试步骤如下:
30.如图1所示,采用全局笛卡尔坐标系x-y-z作为世界坐标系,其原点位于测试泵静止时的壳体质心。z轴与轴中心线重合,指向后端盖,y轴从配流盘下止点指向上止点。本发明方法采用两组涡流传感器(s1和s2、s3和s4)安装在壳体上测量缸体表面两个截面上的径向位移;在测试泵壳体上安装振动传感器s5和s6测量壳体的振动信号;在测试泵后端盖上安装振动传感器s7和s8测量后端盖的振动信号。
31.采集轴向柱塞泵缸体的位移信号。测试泵由电机通过花键连接驱动,压力由测试泵出口管路的节流阀控制,油液温度通过散热器进行控制,使用转速传感器测量转速脉冲,采用两组涡流传感器(s1和s2、s3和s4)采集缸体表面两个截面上四组径向位移信号,如图2所示。
32.采集轴向柱塞泵壳体的位移信号。测试泵由电机通过花键连接驱动,压力由测试泵出口管路的节流阀控制,油液温度通过散热器进行控制,使用转速传感器测量转速脉冲,采用振动传感器s5和s6采集壳体的振动信号。
33.采集轴向柱塞泵后端盖的位移信号。测试泵由电机通过花键连接驱动,压力由测试泵出口管路的节流阀控制,油液温度通过散热器进行控制,使用转速传感器测量转速脉冲,采用振动传感器s7和s8采集后端盖的振动信号。
34.运动坐标系可视为世界坐标系绕x轴旋转,然后绕y轴旋转,接着绕z轴旋转,最后平移得到。则世界坐标系和运动坐标系的坐标变换式表示为:
[0035][0036][0037]
式中,α为绕x轴旋转的角度,β为绕y轴旋转的角度,θ为绕z轴旋转的角度,t
x
为x方向的平移,ty为y方向的平移,tz为z方向的平移。
[0038]
如图3所示,采用全局笛卡尔坐标系u
1-v
1-w1作为运动坐标系,其原点位于壳体质心,w1轴与壳体中心线重合,指向后端盖,v1轴从壳体下止点指向上止点。振动传感器s5测量所得即为s5安装点在世界坐标系下的坐标(x
s5
,y
s5
,z
s5
),而该点在运动坐标系u
1-v
1-w1下的坐标(u
s5
,v
s5
,w
s5
)可由壳体的几何尺寸求出;振动传感器s6测量所得即为s6安装点在世界坐标系下的坐标(x
s6
,y
s6
,z
s6
),而该点在运动坐标系u
1-v
1-w1下的坐标(u
s6
,v
s6
,w
s6
)可由壳体的几何尺寸求出。将四个坐标带入(2)式中可以解出运动坐标系u
1-v
1-w1相对于世界坐标系的运动情况(α1,β1,θ1,t
x1
,t
y1
,t
z1
),即为壳体质心oq相对于世界坐标系的运动情况。运动坐标系u
1-v
1-w1下点的坐标与世界坐标系下点的坐标关系可表示为:
[0039][0040][0041]
式中,α1为壳体质心绕x轴旋转的角度,β1为壳体质心绕y轴旋转的角度,θ1为壳体质心绕z轴旋转的角度,t
x1
为壳体质心x方向的平移,t
y1
为壳体质心y方向的平移,t
z1
为壳体质心z方向的平移。
[0042]
如图4所示,采用全局笛卡尔坐标系u
2-v
2-w2作为运动坐标系,其原点位于缸体质心,w2轴与缸体中心线重合,指向后端盖,v2轴从缸体下止点指向上止点。因涡流传感器s1和s2安装在壳体上故测量所得为截面2-2中心点o2在运动坐标系u
1-v
1-w1下的坐标(u
o12
,v
o12
,w
o12
),带入公式(4)中可以求出在世界坐标系下的坐标(x
o2
,y
o2
,z
o2
),而该点在运动坐标系u
2-v
2-w2下的坐标(u
o2
,v
o2
,w
o2
)可由后端盖的几何尺寸求出;因涡流传感器s3和s4安装在壳体上故测量所得为截面1-1中心点o1在运动坐标系u
1-v
1-w1下的坐标(u
o11
,v
o11
,w
o11
),带入公式(2)中可以求出在世界坐标系下的坐标(x
o1
,y
o1
,z
o1
),而该点在运动坐标系u
2-v
2-w2下的坐标(u
o1
,v
o1
,w
o1
)可由后端盖的几何尺寸求出。将四个坐标带入(2)式中解出运动坐标系u
2-v
2-w2相对于世界坐标系的运动情况(α2,β2,θ2,t
x2
,t
y2
,t
z2
),即为缸体质心ok相对于世界坐标系的运动情况。运动坐标系u
2-v
2-w2下点的坐标与世界坐标系下点的坐标可表示为:
[0043][0044][0045]
式中,α2为缸体质心绕x轴旋转的角度,β2为缸体质心绕y轴旋转的角度,θ2为缸体质心绕z轴旋转的角度,t
x2
为缸体质心x方向的平移,t
y2
为缸体质心y方向的平移,t
z2
为缸体质心z方向的平移。
[0046]
如图5所示,采用全局笛卡尔坐标系u
3-v
3-w3作为运动坐标系,其原点位于后端盖质心,w3轴与后端盖中心线重合,指向后端盖后点,v3轴从后端盖下止点指向上止点。振动传感器s7测量所得即为s7安装点在世界坐标系下的坐标(x
s7
,y
s7
,z
s7
),而该点在运动坐标系u
3-v
3-w3下的坐标(u
s7
,v
s7
,w
s7
)可由后端盖的几何尺寸求出;振动传感器s8测量所得即为s8安装点在世界坐标系下的坐标(x
s8
,y
s8
,z
s8
),而该点在运动坐标系u
3-v
3-w3下的坐标(u
s8
,v
s8
,w
s8
)可由后端盖的几何尺寸求出。将四个坐标带入(2)式中解出运动坐标系u
3-v
3-w3相对于世界坐标系的运动情况(α3,β3,θ3,t
x3
,t
y3
,t
z3
),即为后端盖质心og相对于世界坐标系的运动情况。运动坐标系u
3-v
3-w3下点的坐标与世界坐标系下点的坐标可表示为:
[0047][0048][0049]
式中,α3为缸体质心绕x轴旋转的角度,β3为缸体质心绕y轴旋转的角度,θ3为缸体质心绕z轴旋转的角度,t
x3
为缸体质心x方向的平移,t
y3
为缸体质心y方向的平移,t
z3
为缸体质心z方向的平移。
[0050]
根据缸体的几何尺寸可以较为容易地计算出在运动坐标系u
2-v
2-w2下的缸体配合面对应点的坐标(u,v,w),将其带入公式(6)中解出对应点在世界坐标系下的坐标(x,y,z),如图4所示,得到缸体配合面上任意三个不同共线的点d1,d2,d3在相机坐标系下的坐标,根据三点坐标可以构建缸体配合面平面方程可表示为:
[0051][0052]
式中,xd,yd,zd为缸体上配合面上点的坐标。构建的缸体配合端面如图7所示,根据公式(9)可以算出缸体配合端面的轴向位移zk。
[0053]
根据后端盖的几何尺寸可以较为容易地计算出在运动坐标系u
3-v
3-w3下的配流盘对应点的坐标(u,v,w),将其带入公式(8)中解出对应点在世界坐标系下的坐标(x,y,z),如图5所示,得到配流盘上任意三个不同共线的点f1,f2,f3在世界坐标系下的坐标,根据三点
坐标可以构建配流盘平面方程可表示为:
[0054][0055]
式中,xf,yf,zf为配流盘上点的坐标。构建的配流盘如图7所示,根据公式(10)可以算出配流盘的轴向位移z
p
。
[0056]
如图6所示,配流副的油膜厚度为配流盘的位移减去缸体配合端面的位移,可表示为
[0057]
h=z
p-zkꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0058]
式中,h为油膜厚度,z
p
为配流盘的轴向位移,zk为缸体配合端面的轴向位移。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。