1.本发明涉及仓储搬运设备技术领域,具体为一种仓储用搬运机器人。
背景技术:
2.仓储是通过仓库对商品与物品的储存与保管,“仓
”ꢀ
即仓库,为存放、保管、储存物品的建筑物和场地的总称,可以是房屋建筑、洞穴、大型容器或特定的场地等,具有存放和保护物品的功能,“储
”ꢀ
即储存、储备,表示收存以备使用,具有收存、保管、交付使用的意思,目前市面上的仓储货物的搬运,开始慢慢由人力搬运慢慢转为机器人搬运。
3.现有的机器人在货物搬运时,只是单一的将货物托起,在机器人将货物送往指定地点的过程中,可能存在路面不平,过于颠簸,货物支撑的不稳定,从机器人上掉落下来,照成损坏,增加损失。
技术实现要素:
4.本发明的目的在于提供一种仓储用搬运机器人,以解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:一种仓储用搬运机器人,包括承载件、升降件和控制件,其中,所述升降件和所述控制件均位于所述承载件内,所述承载件包括防护壳体和运输组件,所述运输组件位于所述防护壳体底部,所述升降件包括限位组件和调节件,所述限位组件位于所述调节件顶部,所述控制件包括设置于所述防护壳体内壁上的控制器;所述防护壳体顶部四角均竖直开设有第一容纳槽,所述第一容纳槽内设置有第一气囊,所述防护壳体一侧水平开设有货物出口,所述货物出口内设置有排出组件;所述限位组件包括承载板,所述承载板底部对称竖直开设有第一限位槽和第二限位槽,所述第一限位槽内设置有限位轴,所述限位轴上轴接有限位齿轮。
6.可选的,所述防护壳体内壁两侧对称竖直开设有第二容纳槽,且区别于开设有所述第二容纳槽的所述防护壳体内壁的一侧对称竖直开设有第三容纳槽,所述防护壳体内壁两侧对称设置有第二气囊。
7.可选的,所述防护壳体两侧对称设置有气泵,所述气泵两侧对称设置有第一输气管,且所述气泵底部设置有第二输气管,所述第一输气管一端水平贯穿所述防护壳体并与所述第一气囊连通,所述第二输气管一端水平贯穿所述防护壳体并与所述第二气囊连通。
8.可选的,所述运输组件包括设置于所述防护壳体内的双头电机,所述双头电机两端均固定连接有旋转轴,所述旋转轴两端分别水平贯穿所述防护壳体两侧,且所述旋转轴与所述防护壳体轴接,所述旋转轴两端固定连接有转轮。
9.可选的,所述排出组件包括设置于所述货物出口内的旋转杆,所述旋转杆与所述货物出口内壁轴接,所述旋转杆上通过扭簧连接有第一轨道板,所述第一轨道板内开设有第一滑槽,所述第一滑槽内设置有第二轨道板。
10.可选的,所述限位组件还包括固定设置于所述第二容纳槽内的齿条,所述齿条与
所述限位齿轮啮合,所述承载板底部固定连接有支撑杆,所述支撑杆底部设置有套筒,所述支撑杆一端对称设置有滑块,所述套筒底部与所述防护壳体底部内壁固定连接。
11.可选的,所述套筒中空设置,所述套筒内设置有弹性件,所述套筒内壁上对称竖直开设有第二滑槽,所述支撑杆一端位于所述套筒内,所述滑块位于所述第二滑槽内,所述弹性件一端与所述套筒底部内壁固定连接,所述弹性件另一端与所述支撑杆底部固定连接。
12.可选的,所述调节件包括设置于所述第三容纳槽内的伸缩杆,所述伸缩杆的输出端固定连接有推板,所述伸缩杆一端水平贯穿所述防护壳体并延伸至所述防护壳体外部。
13.可选的,所述控制件还包括设置于所述承载板上的重力传感器和设置于所述防护壳体一侧的摄像头,所述重力传感器与所述控制器电信号连接,所述控制器与所述气泵、双头电机和摄像头均通过电连接。
14.与现有技术相比,本发明的有益效果是:1.本发明通过控制器对控制气泵对第一气囊进行充气,使得第一气囊将承载板上的货物紧紧包裹住,保证在货物搬运过程中的货物的稳定性。
15.2.本发明通过推板使得货物能从箱体内被推出,从第一轨道板和第二轨道板上滑落下来,不需要人工进行卸货,省时省力。
附图说明
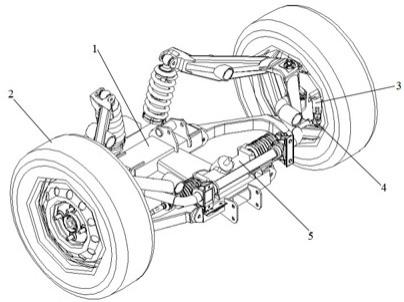
16.图1为本发明一种仓储用搬运机器人的整体结构示意图;图2为本发明一种仓储用搬运机器人的防护壳体结构示意图;图3为本发明一种仓储用搬运机器人的运输组件结构示意图;图4为本发明一种仓储用搬运机器人的第一轨道板和第一滑槽的示意图;图5为本发明一种仓储用搬运机器人的承载板结构示意图;图6为本发明一种仓储用搬运机器人的限位组件部分结构示意图;图7为本发明一种仓储用搬运机器人的套筒结构示意图图8为本发明一种仓储用搬运机器人的拓扑图。
17.图中:1、承载件;11、防护壳体;111、第一容纳槽;112、第一气囊;113、第二容纳槽;114、第三容纳槽;115、第二气囊;116、气泵;117、第一输气管;118、第二输气管;12、运输组件;121、双头电机;122、旋转轴;123、转轮;13、货物出口;14、排出组件;141、旋转杆;142、第一轨道板;143、第一滑槽;144、第二轨道板;2、升降件;21、限位组件;211、承载板;212、第一限位槽;213、第二限位槽;214、限位轴;215、限位齿轮;216、齿条;217、支撑杆;2171、滑块;218、套筒;2181、弹性件;2182、第二滑槽;22、调节件;221、伸缩杆;222、推板;3、控制件;31、控制器;32、重力传感器;33、摄像头。
具体实施方式
18.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
19.请参阅图1至图8,本发明提供一种仓储用搬运机器人,包括带动限位组件21进行
升降的升降件2;对机器人进行控制的控制件3;对物体进行支撑的承载件1;对机器人表面进行保护的防护壳体11;使机器人移动从而带动货物运输的运输组件12;对承载板211进行限位的限位组件21;对推板222的位置进行调节的调节件22;用于控制气泵116对气囊进行充放气体的控制器31;用于容纳第一气囊112的第一容纳槽111;通过充气膨胀对货物挤压从而进行固定的第一气囊112;便于货物流出货物出口13;便于货物平稳流出排出组件14;对货物进行支撑的承载板211;用于容纳限位轴214的第一限位槽212;用于当承载板211落下时对第二气囊115进行容纳的第二限位槽213;便于限位齿轮215进行旋转的限位轴214;带动承载板211进行移动的限位齿轮215;用于容纳齿条216的第二容纳槽113;用于容纳推板222的第三容纳槽114;当承载板211落下时卡在第二限位槽213内,从而对承载板211进行支撑的第二气囊115;对第一气囊112和第二气囊115进行充气的气泵116;便于气体流入第一气囊112的第一输气管117;便于气体流入第二气囊115的第二输气管118;带动旋转轴122进行转动的双头电机121;带动转轮123进行旋转旋转轴122;带动机器人进行移动的转轮123;带动第一轨道板142进行旋转的旋转杆141;便于货物滑下的第一轨道板142;用于容纳第二轨道板144的第一滑槽143,便于与地面贴合,保证货物平稳落下的第二轨道板144;便于限位齿轮215进行移动齿条216;对承载板211进行支撑的支撑杆217;便于容纳支撑杆217的套筒218;用于支撑杆217在套筒218定向滑动的滑块2171;对支撑杆217弹性复位将其顶起的弹性件2181;便于滑块2171进行滑动的第二滑槽2182;使推板222进行移动的伸缩杆221;推动货物使货物从货物出口13出来的推板222;当受力时发送信号给控制器31的重力传感器32;实时查看路面的状况并发送信号给控制器31的摄像头33。
20.其中,带动限位组件21进行升降的升降件2和对机器人进行控制的控制件3均位于对物体进行支撑的承载件1内,承载件1包括对机器人表面进行保护的防护壳体11和使机器人移动从而带动货物运输的运输组件12,运输组件12位于防护壳体11底部,升降件2包括对承载板211进行限位的限位组件21和对推板222的位置进行调节的调节件22,限位组件21位于调节件22顶部,控制件3包括设置于防护壳体11内壁上的用于控制气泵116对气囊进行充放气体的控制器31;防护壳体11顶部四角均竖直开设有用于容纳第一气囊112的第一容纳槽111,第一容纳槽111内设置有通过充气膨胀对货物挤压从而进行固定的第一气囊112,防护壳体11一侧水平开设有便于货物流出货物出口13,货物出口13内设置有便于货物平稳流出排出组件14;限位组件21包括对货物进行支撑的承载板211,承载板211底部对称竖直开设有用于容纳限位轴214的第一限位槽212和用于当承载板211落下时对第二气囊115进行容纳的第二限位槽213,第一限位槽212内设置有便于限位齿轮215进行旋转的限位轴214,限位轴214上轴接有带动承载板211进行移动的限位齿轮215。
21.进一步的,防护壳体11内壁两侧对称竖直开设有用于容纳齿条216的第二容纳槽113,且区别于开设有第二容纳槽113的防护壳体11内壁的一侧对称竖直开设有用于容纳推板222的第三容纳槽114,防护壳体11内壁两侧对称设置有当承载板211落下时卡在第二限位槽213内,从而对承载板211进行支撑的第二气囊115。
22.进一步的,防护壳体11两侧对称设置有对第一气囊112和第二气囊115进行充气的气泵116,气泵116两侧对称设置有便于气体流入第一气囊112的第一输气管117,且气泵116底部设置有便于气体流入第二气囊115的第二输气管118,第一输气管117一端水平贯穿防护壳体11并与第一气囊112连通,第二输气管118一端水平贯穿防护壳体11并与第二气囊
115连通。
23.进一步的,运输组件12包括设置于防护壳体11内的带动旋转轴122进行转动的双头电机121,双头电机121两端均固定连接有带动转轮123进行旋转旋转轴122,旋转轴122两端分别水平贯穿防护壳体11两侧,且旋转轴122与防护壳体11轴接,旋转轴122两端固定连接有带动机器人进行移动的转轮123。
24.进一步的,排出组件14包括设置于货物出口13内的带动第一轨道板142进行旋转的旋转杆141,旋转杆141与货物出口13内壁轴接,旋转杆141上通过扭簧连接有便于货物滑下的第一轨道板142,第一轨道板142内开设有用于容纳第二轨道板144的第一滑槽143,第一滑槽143内设置有便于与地面贴合,保证货物平稳落下的第二轨道板144。
25.进一步的,限位组件21还包括固定设置于第二容纳槽113内的便于限位齿轮215进行齿条216,齿条216与限位齿轮215啮合,承载板211底部固定连接有对承载板211进行支撑的支撑杆217,支撑杆217底部设置有便于容纳支撑杆217的套筒218,支撑杆217一端对称设置有用于支撑杆217在套筒218定向滑动的滑块2171,套筒218底部与防护壳体11底部内壁固定连接。
26.进一步的,套筒218中空设置,套筒218内设置有对支撑杆217弹性复位将其顶起的弹性件2181,套筒218内壁上对称竖直开设有便于滑块2171进行滑动的第二滑槽2182,支撑杆217一端位于套筒218内,滑块2171位于第二滑槽2182内,弹性件2181一端与套筒218底部内壁固定连接,弹性件2181另一端与支撑杆217底部固定连接。
27.进一步的,调节件22包括设置于第三容纳槽114内的使推板222进行移动的伸缩杆221,伸缩杆221的输出端固定连接有推动货物使货物从货物出口13出来的推板222,伸缩杆221一端水平贯穿防护壳体11并延伸至防护壳体11外部。
28.进一步的,控制件3还包括设置于承载板211上的重力传感器32和设置于防护壳体11一侧的实时查看路面的状况并发送信号给控制器31的摄像头33,重力传感器32与控制器31电信号连接,控制器31与气泵116、双头电机121和摄像头33均通过电连接。
29.工作原理:当货物落在承载板211上时,受重力影响,承载板211压着支撑杆217在套筒218内下滑,此时,承载板211上的重力传感器32受力,发送信号给控制器31,控制器31控制气泵116分别对第一气囊112和第二气囊115进行充气,第二气囊115充满气体时,第二气囊115刚好完全卡在第二限位槽213内并对承载板211进行支撑,第一气囊112在充气时向承载板211中间靠拢,并对货物进行挤压固定,防止货物在运输过程中发生碰撞。
30.进一步的,当货物被固定好,控制器31控制双头电机121运转,双头电机121带动旋转轴122进行转动,使得旋转轴122带动转轮123转动,从而带动机器人进行移动,在移动过程中摄像头33实时查看路面的状况并发送信号给控制器31做出控制,当移动到指定地点时,控制器31控制气泵116对第一气囊112和第二气囊115进行抽气,第一气囊112和第二气囊115回缩,承载板211受重力继续下降,持续下降到支撑杆217完全滑入套筒218内。
31.进一步的,伸缩杆221的输出端进行顶出,推动推板222运动,将货物推至货物出口13,当货物顶到货物出口13上的第一轨道板142,此时推板222继续向前推动,货物推动第一轨道板142沿着旋转杆141进行旋转,当到达一定角度时,第一滑槽143内的第二轨道板144从第一滑槽143滑出,物体通过第一轨道板142和第二轨道板144落在指定地点。
32.进一步的,当货物落出,扭簧带动第一轨道板142复位,复位到一点角度时第二轨
道板144滑入第一滑槽143,伸缩杆221回缩,带动推板222回到第三容纳槽114内,此时,弹性件2181弹性复位,将支撑杆217顶起,承载板211跟随支撑杆217被顶到原始位置等待下一次的货物搬运。
33.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。