技术特征:
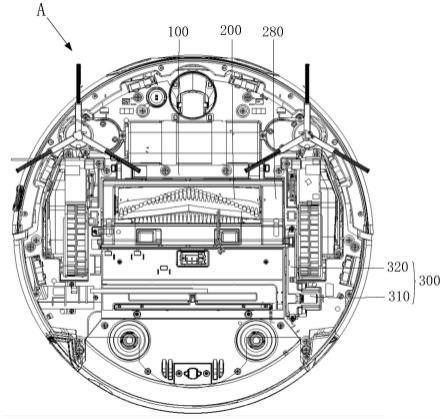
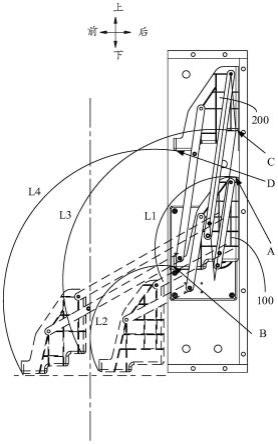
1.一种清洁机器人,其特征在于,包括底座(100)、滚刷装置(200)和驱动机构(300),其中:所述滚刷装置(200)的第一侧转动地连接于所述底座(100),所述滚刷装置(200)的第二侧为摆动侧;所述驱动机构(300)设于所述底座(100),所述驱动机构(300)与所述摆动侧配合,所述驱动机构(300)可驱动所述摆动侧在第一位置与第二位置之间切换;在所述摆动侧处在所述第一位置的情况下,所述摆动侧处在悬空状态;在所述摆动侧处在所述第二位置的情况下,所述摆动侧处在触地状态,且所述摆动侧可绕着所述第一侧摆动。2.根据权利要求1所述的清洁机器人,其特征在于,所述驱动机构(300)包括驱动主体(310)和摆杆(320),所述驱动主体(310)设于所述底座(100),所述摆杆(320)转动地设于所述底座(100),所述驱动主体(310)与所述摆杆(320)相连,以驱使所述摆杆(320)在第一角度与第二角度之间转动,所述摆杆(320)与所述摆动侧相连,其中:在所述摆杆(320)转动至所述第一角度的情况下,所述摆杆(320)带动所述摆动侧转动至所述第一位置;在所述摆杆(320)转动至所述第二角度的情况下,所述摆杆(320)带动所述摆动侧转动至所述第二位置。3.根据权利要求2所述的清洁机器人,其特征在于,所述驱动主体(310)包括驱动电机(311)和凸轮(312),所述凸轮(312)与所述驱动电机(311)的动力输出轴(311a)固定相连,所述摆杆(320)的第一端与所述凸轮(312)的轮缘滚动接触,所述摆杆(320)的第二端与所述摆动侧配合,所述摆杆(320)可随着所述凸轮(312)的转动在所述第一角度与所述第二角度之间切换,所述驱动电机(311)的动力输出轴(311a)与所述清洁机器人(a)的高度方向相垂直。4.根据权利要求3所述的清洁机器人,其特征在于,所述摆杆(320)与所述底座(100)的转动连接处位于所述摆杆(320)的第一端与所述摆杆(320)的第二端之间,所述凸轮(312)的轮缘与所述摆杆(320)的第一端相接触的区域为第一配合处,所述摆动侧与所述摆杆(320)的第二端相接触的区域为第二配合处,所述第二配合处与所述转动连接处之间的距离为第二距离,所述第一配合处与所述转动连接处之间的距离为第一距离,所述第一距离大于所述第二距离。5.根据权利要求3或4所述的清洁机器人,其特征在于,所述摆杆(320)的第一端包括挡墙(321),所述驱动电机(311)包括电机主体和与所述电机主体相连的所述动力输出轴(311a),所述凸轮(312)位于所述电机主体与所述挡墙(321)之间,所述挡墙(321)与所述凸轮(312)在所述动力输出轴(311a)的轴向限位配合。6.根据权利要求2至4任一项所述的清洁机器人,其特征在于,所述驱动机构(300)还包括壳体(330),所述驱动主体(310)、所述摆杆(320)均安装于所述壳体(330)内,所述壳体(330)嵌设在所述底座(100)内。7.根据权利要求2所述的清洁机器人,其特征在于,所述驱动机构(300)还包括拨齿(340),所述拨齿(340)与所述摆杆(320)固定相连,所述拨齿(340)可随所述摆杆(320)的转动而移动,所述拨齿(340)可拨动所述摆动侧移动至所述第一位置;
在所述摆动侧处在所述第一位置的情况下,所述摆动侧被夹紧定位在所述拨齿(340)与所述底座(100)之间;在所述摆动侧处在所述第二位置的情况下,所述摆动侧与所述底座(100)之间形成摆动容许空间,所述摆动侧可在所述摆动容许空间内摆动。8.根据权利要求7所述的清洁机器人,其特征在于,所述滚刷装置(200)开设有凹台(210),所述凹台(210)设置在所述摆动侧的端部,且所述凹台(210)的开口贯穿至所述滚刷装置(200)的第一端面(220),所述摆杆(320)位于所述第一端面(220)的背向所述滚刷装置(200)的第二端面(230)的一侧,所述拨齿(340)自所述开口伸至所述凹台(210)内。9.根据权利要求2所述的清洁机器人,其特征在于,所述驱动机构(300)还包括弹性件(350),所述弹性件(350)设于所述底座(100)与所述摆杆(320)之间,所述弹性件(350)用以驱动所述摆杆(320)从所述第一角度转动至所述第二角度。10.根据权利要求1所述的清洁机器人,其特征在于,所述滚刷装置(200)还包括挂接凸起(290),所述底座(100)开设有挂接孔,所述挂接凸起(290)设于所述摆动侧的端部,所述挂接凸起(290)伸至所述挂接孔中,且所述挂接凸起(290)与所述挂接孔在所述摆动侧的转动方向限位配合。11.一种清洁机器人的控制方法,其特征在于,所述清洁机器人(a)为权利要求1至10中任一项所述的清洁机器人(a),所述控制方法包括:接收第一指令,以及响应于所述第一指令,控制所述驱动机构(300)驱动所述摆动侧处在悬空状态;接收第二指令,以及响应于所述第二指令,控制所述驱动机构(300)驱动所述摆动侧处在触地状态。12.根据权利要求11所述的控制方法,其特征在于,所述清洁机器人(a)包括摄像头,所述控制方法还包括:控制所述摄像头获取地面实际图像;比对所述实际图像与预设地面图像是否一致;在所述实际图像与所述预设地面图像不一致的情况下,发出所述第一指令;在所述实际图像与所述预设地面图像一致的情况下,发出所述第二指令。
技术总结
本发明公开一种清洁机器人及其控制方法,所公开的清洁机器人包括底座、滚刷装置和驱动机构,其中:所述滚刷装置的第一侧转动地连接于所述底座,所述滚刷装置的第二侧为摆动侧;所述驱动机构设于所述底座,所述驱动机构与所述摆动侧配合,所述驱动机构可驱动所述摆动侧在第一位置与第二位置之间切换;在所述摆动侧处在所述第一位置的情况下,所述摆动侧处在悬空状态;在所述摆动侧处在所述第二位置的情况下,所述摆动侧处在触地状态,且所述摆动侧可绕着所述第一侧摆动。上述方案可以解决在一些特殊的场景中,滚刷装置与地面持续接触而干扰清扫的问题。清扫的问题。清扫的问题。
技术研发人员:张乐乐 孟向伟 金静阳
受保护的技术使用者:杭州萤石软件有限公司
技术研发日:2022.05.13
技术公布日:2022/7/22
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。