1.本发明涉及避障传感的技术领域,具体地,涉及一种清洁机器人的避障传感系统、方法及清洁机器人。尤其是,优选的涉及一种三维清洁机器人的避障传感系统。
背景技术:
2.因酒店卫生间环境复杂,对酒店机器人的避障传感系统提出了较高的要求。
3.公开号为cn205121339u的中国实用新型专利文献公开了一种机器人室内避障传感装置,包括一组红外线传感器和两组超声波传感器,所述一组红外线传感器安装在机器人正前方的下部,所述两组超声波传感器分别安装在机器人正前方的上部和中部。
4.针对上述中的相关技术,发明人认为酒店卫生间场景复杂,单一传感器无法保证安全性,较难解决大部分避障感知问题。
技术实现要素:
5.针对现有技术中的缺陷,本发明的目的是提供一种清洁机器人的避障传感系统、方法及清洁机器人。
6.根据本发明提供的一种清洁机器人的避障传感系统,包括传感器组模块;
7.所述传感器组模块设置在清洁机器人上;
8.所述传感器组模块:用于感知卫生间各种材质的环境,得到原始传感器数据;
9.所述清洁机器人根据原始传感器数据进行避障移动。
10.优选的,该系统还包括先验知识模块和可信度处理模块;
11.所述先验知识模块和可信度处理模块设置在清洁机器人上;
12.所述先验知识模块获得先验知识,并将先验知识传输给可信度处理模块;
13.所述可信度处理模块对先验知识和原始传感器数据进行处理,判断原始传感器数据的可信度,得到处理后的传感数据;
14.所述清洁机器人根据处理后的传感数据进行避障移动。
15.优选的,所述传感器组模块包括如下模块:
16.激光雷达模块:感知卫生间环境的二维轮廓;
17.深度相机模块:感知卫生间激光雷达盲区;
18.超声波模块:感知卫生间光学易受干扰材质;
19.卫生间环境的二维轮廓数据、卫生间激光雷达盲区数据和卫生间光学受干扰材质数据构成原始传感器数据。
20.优选的,所述先验知识模块包括传感器特性知识和人为区域标注知识,用于结合传感器数据特性和人为在地图上的标注。
21.优选的,所述超声波模块、激光雷达模块和深度相机模块依次安装在清洁机器人从底部到顶部的方向上。
22.优选的,所述深度相机模块在清洁机器人上通过可拆卸旋转设置来转换视场角。
23.优选的,所述深度相机模块竖直设置时,竖直方向视场角为72
°
,水平方向视场角为50
°
。
24.优选的,所述超声波模块围绕清洁机器人的轴向设置为多个。
25.根据本发明提供的一种清洁机器人的避障传感方法,应用清洁机器人的避障传感系统,包括如下步骤:
26.传感数据获取步骤:所述传感器组模块感知卫生间各种材质的环境,得到原始传感器数据;
27.机器人移动步骤:所述清洁机器人根据原始传感器数据进行避障移动。
28.根据本发明提供的一种清洁机器人,包括清洁机器人的避障传感系统。
29.与现有技术相比,本发明具有如下的有益效果:
30.1、本发明尽量使用少的传感器达到卫生间的有效感知范围覆盖,用尽量少的、通用的传感器解决大部分避障感知问题;
31.2、本发明通过先验知识预设达使多传感器抗干扰能力更强;
32.3、本发明提出的多传感器布局,能有效感知酒店卫生间场景,保障传感器的通用性和低成本。
附图说明
33.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
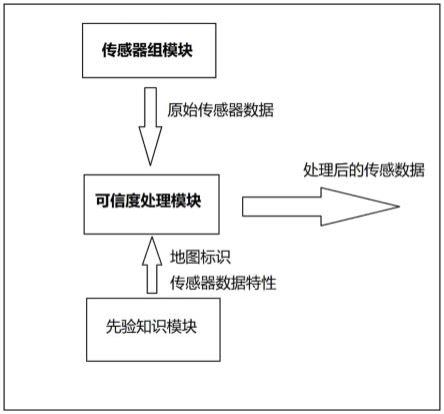
34.图1为模块间输入输出关系示意图;
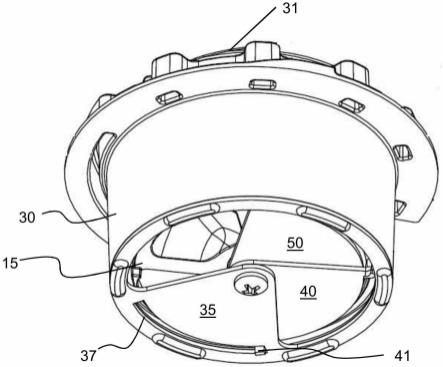
35.图2为相机fov侧视示意图;
36.图3为相机fov俯视示意图;
37.图4为突出超声波模块的俯视图;
38.图5为突出超声波模块的侧视图。
具体实施方式
39.下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
40.本发明实施例公开了一种三维清洁机器人的避障传感系统,用尽可能少、参数最通用的传感器实现了卫生间场景的有效感知,并结合了先验知识模块和可信度处理模块的融合进一步提升了数据可信度。如图1和图2所示,包括传感器组模块、先验知识模块和可信度处理模块。传感器组模块、先验知识模块和可信度处理模块设置在清洁机器人上。
41.传感器组模块:用于感知卫生间各种材质的环境,得到原始传感器数据。传感器组模块主要用于获取环境的原始传感器数据。
42.传感器组模块包括激光雷达模块(型号为星秒pavo、万集wlr716)、深度相机模块(型号为intel realsense)和超声波模块(型号为youcee jsn-sr20-y1)。超声波模块、激光雷达模块和深度相机模块依次安装在清洁机器人从底部到顶部的方向上,三者都可以感知
到人体进行避障。
43.激光雷达模块(2d激光雷达模块):感知卫生间环境的二维轮廓(水平的二维轮廓),在清洁机器人上的安装高度约为450mm。
44.如图2和图3所示,深度相机模块(3d深度相机模块)在清洁机器人通过可拆卸旋转设置来转换视场角。深度相机模块竖直设置时,竖直方向视场角为72
°
,水平方向视场角为50
°
。深度相机模块:感知卫生间激光雷达盲区,主要覆盖台盆和马桶。
45.具体为,3d深度相机模块,其用于感知卫生间台盆和马桶等激光雷达盲区高度,在清洁机器人上安装高度约为离地800mm,位置位于机器人中间(机器人宽度方向上的中间),见图2、图3;该深度相机采用的为市面通用相机的fov参数,能保证传感器的可替换性和通用性。一般的相机的视场角在水平方向为72
°
,垂直方向视场角为50
°
,很难做到有效感知到台盆和马桶。相机竖直的安装可以做到水平、垂直方向的视场角替换,满足卫生间场景在垂直方向的打fov需求。fov重点表示视场角。
46.如图4和图5所示,超声波模块围绕清洁机器人的轴向设置为多个。超声波模块:感知卫生间光学受干扰材质。卫生间环境的二维轮廓数据、卫生间激光雷达盲区数据和卫生间光学受干扰材质数据构成原始传感器数据。
47.具体为,超声波模块,其用于感知光学容易受干扰材质,主要用于感知淋浴间的玻璃、地面的杂物。机器人每个面上安装有3个超声波模块,共12个超声波模块,分别位于每个面(长度和宽度方向上)的两边和中间位置,安装离地高度为300mm,见图4和图5。
48.先验知识模块获得先验知识,并将先验知识传输给可信度处理模块。先验知识模块包括传感器特性知识和人为区域标注知识,用于结合传感器数据特性和人为在地图上的标注。先验知识模块用于接受先验知识,提升可信度处理模块可靠性。
49.具体为,先验知识模块主要包含传感器特性知识和人为区域标注知识,用于结合传感器数据特性(如:激光光学强度、数据稳定性等方式)和人为在地图上的标注(如:部署时在地图标注了浴室玻璃强区域,超声传感器探测到此处时采取更信任超声数据)。
50.可信度处理模块对先验知识和原始传感器数据进行处理,判断原始传感器数据的可信度,得到处理后的传感数据。
51.具体为,可信度处理模块用于处理部分传感器噪声的干扰。可信度处理模块主要用于接受实时传感器数据和加载先验知识,判断传感器数据可信度。具体可通过设计滤波器、代价函数等方法实现。
52.对先验知识和原始传感器数据进行处理的步骤包括如下:步骤s0:启动时载入先验知识、包括人为区域标注知识和传感器数据特性知识、初始化接收到的传感器数据置信度。步骤s1.从定位模块获取机器人位置信息、判断机器人附近是否存在人为标注区域,若有转至步骤s2,无则转至步骤s3。步骤s2:判断哪些数据在人为标注区域内,根据人为标注区域类别数据对传感器的置信度进行更新。步骤s3:接受步骤s2或者步骤s0的原始传感器数据,通过滤波融合等现有算法计算出最终的传感器置信度,对置信度低的传感器数据进行去除。步骤s4:输出最终的传感器数据。判断原始传感器数据的可信度,得到处理后的传感数据。处理后的数据根据需要可以两种形式发出:1、融合的三维点云;2、每一种类型传感器对应的数据形式(激光雷达2维点云、深度相机3维点云、超声波:测距波束)。
53.清洁机器人根据原始传感器数据进行避障移动。具体为,清洁机器人根据处理后
的传感数据进行避障移动。
54.本发明实施例还公开了一种清洁机器人的避障传感方法,如图1和图2所示,应用清洁机器人的避障传感系统,包括如下步骤:传感数据获取步骤:传感器组模块感知卫生间各种材质的环境,得到原始传感器数据。
55.先验知识传输步骤:先验知识模块获得先验知识,并将先验知识传输给可信度处理模块。
56.可信度处理步骤:可信度处理模块对先验知识和原始传感器数据进行处理,判断原始传感器数据中的可信度,得到处理后的传感数据。
57.机器人移动步骤:清洁机器人根据原始传感器数据进行避障移动。具体为,清洁机器人根据处理后的传感数据进行避障移动。
58.本发明实施例还公开了一种清洁机器人,如图1和图2所示,包括清洁机器人的避障传感系统。
59.本发明提出多传感器布局和基于传感器特性的可信度判断方式,能有效感知酒店卫生间场景,保障传感器的通用性和低成本。
60.在本技术的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
61.以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。