技术特征:
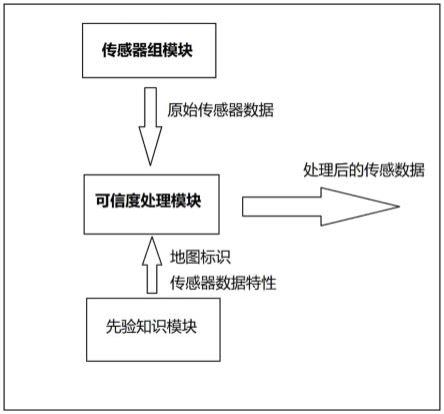
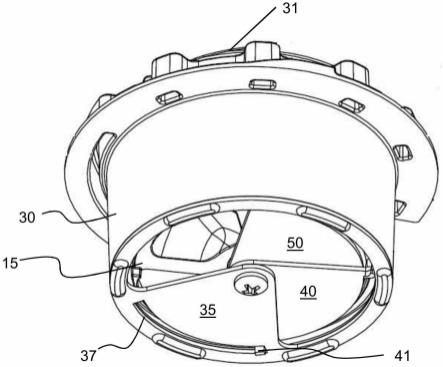
1.一种清洁机器人的避障传感系统,其特征在于,包括传感器组模块;所述传感器组模块设置在清洁机器人上;所述传感器组模块:用于感知卫生间各种材质的环境,得到原始传感器数据;所述清洁机器人根据原始传感器数据进行避障移动。2.根据权利要求1所述的清洁机器人的避障传感系统,其特征在于,该系统还包括先验知识模块和可信度处理模块;所述先验知识模块和可信度处理模块设置在清洁机器人上;所述先验知识模块获得先验知识,并将先验知识传输给可信度处理模块;所述可信度处理模块对先验知识和原始传感器数据进行处理,判断原始传感器数据的可信度,得到处理后的传感数据;所述清洁机器人根据处理后的传感数据进行避障移动。3.根据权利要求1所述的清洁机器人的避障传感系统,其特征在于,所述传感器组模块包括如下模块:激光雷达模块:感知卫生间环境的二维轮廓;深度相机模块:感知卫生间激光雷达盲区;超声波模块:感知卫生间光学受干扰材质;卫生间环境的二维轮廓数据、卫生间激光雷达盲区数据和卫生间光学受干扰材质数据构成原始传感器数据。4.根据权利要求2所述的清洁机器人的避障传感系统,其特征在于,所述先验知识模块包括传感器特性知识和人为区域标注知识,用于结合传感器数据特性和人为在地图上的标注。5.根据权利要求3所述的清洁机器人的避障传感系统,其特征在于,所述超声波模块、激光雷达模块和深度相机模块依次安装在清洁机器人从底部到顶部的方向上。6.根据权利要求3所述的清洁机器人的避障传感系统,其特征在于,所述深度相机模块在清洁机器人上通过可拆卸旋转设置来转换视场角。7.根据权利要求3所述的清洁机器人的避障传感系统,其特征在于,所述深度相机模块竖直设置时,竖直方向视场角为72
°
,水平方向视场角为50
°
。8.根据权利要求3所述的清洁机器人的避障传感系统,其特征在于,所述超声波模块围绕清洁机器人的轴向设置为多个。9.一种清洁机器人的避障传感方法,其特征在于,应用权利要求1-8任一所述的清洁机器人的避障传感系统,包括如下步骤:传感数据获取步骤:所述传感器组模块感知卫生间各种材质的环境,得到原始传感器数据;机器人移动步骤:所述清洁机器人根据原始传感器数据进行避障移动。10.一种清洁机器人,其特征在于,包括权利要求1-8任一所述的清洁机器人的避障传感系统。
技术总结
本发明提供了一种清洁机器人的避障传感系统、方法及清洁机器人,包括传感器组模块;所述传感器组模块设置在清洁机器人上;所述传感器组模块:用于感知卫生间各种材质的环境,得到原始传感器数据;所述清洁机器人根据原始传感器数据进行避障移动。本发明尽量使用少的传感器达到卫生间的有效感知范围覆盖,用尽量少的、通用的传感器解决大部分避障感知问题;并通过先验知识预设达使多传感器抗干扰能力更强。强。强。
技术研发人员:刘宇星 郭震
受保护的技术使用者:上海景吾酷租科技发展有限公司
技术研发日:2022.04.24
技术公布日:2022/7/22
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。