1.本发明涉及垃圾分拣领域,尤其涉及了一种智能垃圾分拣处理系统及分拣处理方法。
背景技术:
2.随着生活水平的逐步提高,人们面对生活环境要求越来越高,对于垃圾的处理也越来越智能化,能够有效实现对垃圾的分类管理。
3.现有技术中也存在很多对垃圾进行智能分拣的系统,能够自动化对垃圾进行分类,目前的分拣系统中一般均是分拣后再通过后续一系列的操作进行垃圾后续处理,没有形成对垃圾的一体化管理。
技术实现要素:
4.本发明针对现有技术中垃圾分拣系统中存在的问题,提供了一种智能垃圾分拣处理系统及分拣处理方法。
5.为了解决上述技术问题,本发明通过下述技术方案得以解决:
6.一种智能垃圾分拣处理系统,包括mcu处理器,还包括与mcu处理器连接的视觉传感输入电路和传输分拣控制电路,视觉传感输入电路用于获取待分拣图像并根据获取的待分拣图像发送给mcu处理器,mcu处理器用于识别所述待分拣图像后进行垃圾类别分析,并根据分析结果发送分拣指令给传输分拣控制电路,传输分拣控制电路根据接收到的指令完成垃圾分拣;还包括与mcu处理器连接的消毒除臭控制电路和厨余垃圾处理控制电路,消毒除臭控制电路和厨余垃圾处理控制电路均包括除菌消毒模块和垃圾压缩模块,厨余垃圾处理控制电路还包括固液分离模块和污水处理模块。
7.通过该分拣处理系统能够实现对垃圾的回收、分拣以及分拣后的一体化管理,充分满足垃圾智慧城市智能管理的需要。
8.作为优选,还包括与mcu处理器连接的称重电路,称重电路包括设置于与不同类别垃圾相对的垃圾桶桶底的承重模块,称重模块包括用于采集垃圾桶内垃圾重量的压力传感器。压力传感器的设置能够实现对垃圾桶内垃圾重量的成称重。
9.作为优选,还包括与mcu处理器连接的容量传感器,容量传感器用于监测垃圾桶内垃圾是否填满且设置于垃圾桶顶部。容量传感器能够实现对垃圾箱内垃圾是否填满进行监测。
10.作为优选,容量传感器为超声传感器或电磁传感器.
11.作为优选,还包括与mcu处理器连接的用于对垃圾桶内垃圾满载进行报警的报警提示电路,报警提示电路上连接有警示灯。警示灯的设置能够很好的提醒人员垃圾桶内垃圾满载问题。
12.作为优选,还包括通过通讯电路与mcu处理器连接的智能垃圾分拣服务平台,智能垃圾分拣服务平台包括人机交互设备,人机交互设备包括用于进行人机交互对话联系的电
子显示屏。
13.作为优选,消毒除臭控制电路上连接有紫外线除菌灯,紫外线除菌灯设置于垃圾桶桶盖的下端面上。
14.作为优选,垃圾桶的上端开口端面上设有硅胶层,垃圾桶的侧壁上设有透气孔且侧壁内部设有微生物除臭层。透气孔和微生物除臭层能够有效解决垃圾桶内垃圾的除臭问题。
15.一种智能垃圾分拣处理系统的分拣处理方法,其基于上述的一种智能垃圾分拣处理系统,其具体包括以下步骤:
16.步骤一、获取待分拣图像;
17.步骤二、识别所述待分拣图像后进行垃圾类别分析,并根据分析结果发送待分拣指令;
18.步骤三、根据所述待分拣指令将待分拣图像中对应的不同垃圾分拣到对应指定区域,完成垃圾分拣;
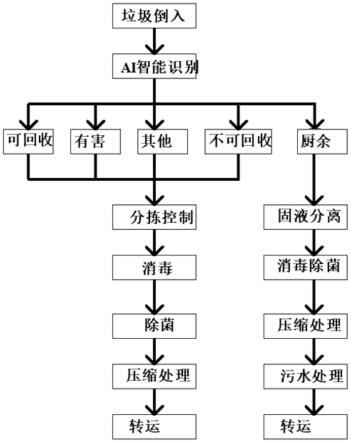
19.步骤四、对步骤三分拣后的可回收垃圾、有害垃圾、其他干垃圾和不可回收垃圾进行处理,具体处理过程依次包括消毒处理、除菌处理、压缩处理和清洁转运处理;
20.步骤五、对步骤三分拣后的厨余垃圾进行处理,具体处理过程依次包括固液分离处理、消毒除菌处理、压缩处理、污水处理和清洁转运处理。
21.作为优选,步骤一中通过视觉传感输入电路获取分拣图像;
22.步骤二具体为通过mcu处理器将所述待分拣图像进行标准化预处理,送入所述分类检测模型中进行正向推理,得到所述分拣图像中所有垃圾类别与坐标信息,并根据所述分拣图像中所有垃圾类别与坐标信息发送待分拣指令给传输分拣控制电路;
23.步骤三具体为传输分拣控制电路根据待分拣指令生成不同的皮带传输距离信号,并根据所述不同的舵机转角信号与不同垃圾类别的对应关系,控制所述皮带传送距离,气缸推动与打开放料口,以完成垃圾的分拣。
附图说明
24.图1是本发明实施例1中的流程图。
25.图2是本发明实施例1中的控制电路结构图。
26.图3为实施例1中的一种垃圾分拣装置整体的示意图。
27.图4为实施例1中的一种分拣装置整体的剖视示意图。
28.图5为实施例1中的称重板的示意图。
29.图6为实施例1中的安装板的示意图。
30.图7位实施例1中的封堵板的示意图。
具体实施方式
31.下面结合附图与实施例对本发明作进一步详细描述。
32.实施例1
33.一种智能垃圾分拣处理系统,如图1、图2所示,包括用于对整个分拣处理系统进行供电的电源电路,还包括mcu处理器,mcu处理器采用拟stc芯片,还包括与mcu处理器连接的
视觉传感输入电路和传输分拣控制电路,视觉传感输入电路用于获取待分拣图像并根据获取的待分拣图像发送给mcu处理器,mcu处理器用于识别所述待分拣图像后进行垃圾类别分析,并根据分析结果发送分拣指令给传输分拣控制电路,传输分拣控制电路根据接收到的指令完成垃圾分拣;还包括与mcu处理器连接的消毒除臭控制电路和厨余垃圾处理控制电路,消毒除臭控制电路和厨余垃圾处理控制电路均包括除菌消毒模块和垃圾压缩模块,厨余垃圾处理控制电路还包括固液分离模块和污水处理模块。
34.本实施例中基于视觉传感器识别技术,ai智能算法控制,对干垃圾进行分类识别,通过控制传输皮带进行对干垃圾进行分拣,分为可回收垃圾、有害垃圾、不可回收垃圾进行分类、消毒、除菌,再通过称重传感对垃圾压缩等处理,达到垃圾智能分类及处理,实现了对垃圾分拣以及后续处理的一体化处理。
35.本实施例中还包括与mcu处理器连接的称重电路,称重电路包括设置于与不同类别垃圾相对的垃圾桶桶底的称重模块,称重模块包括用于采集垃圾桶内垃圾重量的压力传感器,采用压力传感器采集数据,可对垃圾进行智能称重并压缩,减少垃圾占用的空间,释放余量。
36.本实施例中还包括与mcu处理器连接的容量传感器,容量传感器用于监测垃圾桶内垃圾是否填满且设置于垃圾桶顶部,其中,容量传感器为超声传感器或电磁传感器。容量传感器能够对垃圾箱内垃圾是否填满进行监测,当垃圾桶内垃圾的容量达到80%的时候,监控中心即向垃圾箱发出垃圾箱需要清理垃圾的信号,以便工作人员及时的对垃圾箱进行清理。
37.本实施例中还包括与mcu处理器连接的用于对垃圾桶内垃圾满载进行报警的报警提示电路,报警提示电路上连接有警示灯。垃圾回收箱满载后,满桶提示信号发出,相关工作人员可对已分类的垃圾及时搬运。箱体两侧设有预警警示灯,分别对应各个投口。当某个箱体内部垃圾桶满载,相应警示灯亮起。
38.另外,还包括通过通讯电路与mcu处理器连接的智能垃圾分拣服务平台,智能垃圾分拣服务平台包括人机交互设备,人机交互设备包括用于进行人机交互对话联系的电子显示屏。通讯单元拟采用德州仪器数字信号处理器件tms320f2812、串口通讯器件max3223及其外围器件构成,用于校准测量数据、发送数据、接收控制指令、发送控制指令等功能。相互之间通过rs232串口通讯交互信息。
39.本实施例中对于分拣后的垃圾进行处理主要包括消毒除菌、压缩转运,其中消毒除臭控制电路上连接有紫外线除菌灯,紫外线除菌灯设置于垃圾桶桶盖的下端面上,紫外线除菌灯有两个,两个紫外线除菌灯左右对称分布。采用紫外线控制、等离子光催化技术,通过传感器、电机、控制电路及相关设备实现对垃圾分类回收站的消毒、杀菌、除臭等环保处理。
40.垃圾桶的上端开口端面上设有硅胶层,垃圾桶的侧壁上设有透气孔且侧壁内部设有微生物除臭层。
41.消毒除臭控制电路上还连接有用于对垃圾进行压缩的压缩装置,压缩装置包括第一压缩装置和第二压缩装置,第一压缩装置和第二压缩装置共同作用,分别从两个方向对垃圾箱内的垃圾实施压缩,实现自动压缩功能,提高垃圾压缩的效率,减少垃圾占有的空间,节约箱体内的空间,提高垃圾箱的空间使用率。
42.如图3-图7所示,本实施例中给出了对应于上述智能垃圾分拣处理系统的垃圾分拣装置,垃圾分拣装置主要通过上述的垃圾桶进行分拣,上述垃圾桶的具体结构形式能够实现上述的杀菌、消毒、压缩等功能,具体结构如下:
43.其包括顶端开口垃圾桶主体100;垃圾桶主体100内部设有可转动且截面呈隔板200,隔板200将垃圾桶主体100分隔为上部分的收纳腔250及下部分的压缩腔260,压缩腔260内设有与垃圾桶主体100底面垂直且可运动的第一压缩板211,垃圾桶主体100的外壁设有用于驱动第一压缩板211运动的第一气缸210;收纳腔250内设有能够沿垃圾桶主体100高度方向运动的第二压缩板221,第二压缩板221上方设有驱动第二压缩板221运动的第二气缸220;垃圾桶主体100远离第一压缩机构的侧壁下端部设有垃圾出口240。
44.通过本实施例中的可转动隔板200的设置,使得掉落在隔板200上的垃圾会掉入压缩腔260内,从而能够较为便捷的实现使垃圾由收纳腔250掉入压缩腔260的效果;通过第一压缩板211和第一气缸210及第二压缩板221和第二气缸220的设置,使得第一气缸210带动第一压缩板211运动;第二气缸220带动第二压缩板221运动,共同对掉入压缩腔260内的垃圾进行压缩,从而较为便捷的实现了对垃圾进行压缩的效果。
45.本实施例中,隔板200的下端面与第一压缩板211的上端面均为倾斜设置且相互配合。
46.通过本实施例中的隔板200的下端面与第一压缩板211的上端面均为倾斜设置且相互配合的设置,使得当第一压缩板211向远离第二压缩板221方向运动时,第一压缩板211能够使隔板200发生转动,从而能够较佳实现使掉落在隔板200上的垃圾掉入压缩腔260内的效果;并且隔板200与第一气缸210相邻端部的下拐角处为圆角,其能够在隔板200发生转动时,较佳的避免隔板200与垃圾桶主体100的内壁产生干涉。
47.本实施例中,第二压缩板221上方设有用于安装第二气缸220且截面呈l型的安装板230,安装板230通过螺栓固定在垃圾桶主体100的内壁上。
48.通过本实施例中的截面呈l型的安装板230的设置,使得第二气缸220能够安装在安装板230上,从而较为便捷的实现了对第二气缸220的安装;同时使得当隔板200上垃圾较多时,垃圾不会掉落到安装板230上,从而能够较好对垃圾进行阻挡。
49.本实施例中,安装板230上端面设有用于固定安装板230的安装块400。
50.通过本实施例中的安装块400设置,使得安装板400能够固定垃圾桶主体100的内侧壁上,从而较为便捷的实现对安装板400的安装。
51.本实施例中,垃圾桶主体100外侧壁的下端部设有与垃圾出口240相邻的称重板120,称重板120上端面设有安装槽300,安装槽300内安装有称重模块150,称重模块150设有压力传感器。
52.通过本实施例中的安装槽300的设置,使得称重模块150能够放置在安装槽300内,从而能够较为便捷的实现对称重模块150的安装;通过压力传感器的设置,使得被压缩后的垃圾的重量能够被检测出,从而能够较为便捷的使操作人员测量出被压缩后垃圾的重量。
53.本实施例中,称重板120与垃圾桶主体100相邻端部的上端面设有用于封堵垃圾出口240且可在称重板120上端面滑动的的封堵板160,称重板120与垃圾桶主体100相邻端部的上端面设有用于对封堵板160进行限位的限位机构。
54.通过本实施例中的封堵板160的设置,使得当垃圾桶主体100内的垃圾在进行压缩
时,垃圾不会从垃圾出口240被挤压出垃圾桶主体100,从而能够较好的实现对垃圾桶主体100的密封;通过限位机构的设置,使得封堵板160能够贴靠在垃圾出口240,从而较为便捷的实现了对封堵板160的限位。
55.本实施例中,封堵板160与垃圾桶主体100相邻的侧面设有能够卡入垃圾出口240的凸块500。
56.通过本实施例中的通过凸块500的设置,使得封堵板160能够更好的贴合在垃圾桶主体100的侧壁上,从而较佳的提高了垃圾桶主体100的密封性。
57.本实施例中,限位机构包括一端开口且与垃圾桶主体100相邻的滑槽310,滑槽310内设有弹簧安装柱320,封堵板160下端面设有能够沿弹簧安装柱320滑动的滑块510,弹簧安装柱320套设有一端抵靠在滑块510上,另一端抵靠在滑槽310底面上的弹簧330。通过本实施例中的滑槽310、弹簧安装柱320、弹簧330及滑块510的设置,使得封堵板具有始终朝向垃圾桶主体运动的趋势,从而较佳的实现了对封堵板的限位。
58.本实施例中,垃圾桶主体100上端部的内壁设有用于监测垃圾容量的容量传感器140。通过本实施例中容量传感器140的设置,使得当垃圾桶主体100内的垃圾的容量超过一定容量时,监控中心会发出警报,从而能够较好的使工作人员及时对垃圾桶进行清理。
59.垃圾桶主体100的上端面设有硅胶层130;垃圾桶主体100上端部的内壁设有紫外线杀菌灯140。通过本实施例中的紫外线杀菌灯的140设置,使得紫外线杀菌灯140能够对掉入垃圾桶主体100内的垃圾进行杀菌,从而能够较为便捷的实现对垃圾进行杀菌的效果。
60.本实施例的一种垃圾分拣装置在具体使用时,第一步启动第一气缸210使第一气缸210带动第一压缩板211运动,由于隔板200的下端面与第一压缩板211的上端面为切斜设置且相互配合的,当第一压缩板211朝向第一气缸210运动时,隔板200会逆时针转动,掉落在隔板200上端面的垃圾会掉入压缩腔260内,当第一压缩板211朝向远离第一气缸210的方向运动时,隔板200会发生顺时针转动,使垃圾继续掉落在隔板200上端面;同时第一压缩板211会挤压垃圾朝向垃圾出口240运动,当第一压缩板211停止运动,启动第二气缸220,使第二气缸220带动第二压缩板211向压缩腔260内运动,并对垃圾进行压缩;当垃圾压缩完成后,第一压缩板211会继续推动压缩后的垃圾块朝向垃圾出口240方向运动,继而推动封堵板160向远离垃圾桶主体100的方向运动,当垃圾块被完全推出垃圾桶主体100时,当称重模块150对压缩好的垃圾块完成称重后即可将压缩好的垃圾块取走,同时由于弹簧330的作用,封堵板160会朝向垃圾桶主体100的方向运动,直至凸块500卡入垃圾出口240内。
61.本实施例中传输分拣控制电路通过电机控制皮带传输,ai智能识别垃圾类型,进行相应的分拣操作,实现干垃圾分类。
62.厨余垃圾处理控制电路通过挤压、烘干、压缩等操作,实现对厨余垃圾的初步处理,压缩后搬运,污水经沉淀、过滤、消毒,后排入污水管道,水经过滤、除菌,实现环保排放污水管,减少运输过程中产生的二次污染问题。
63.厨余垃圾处理控制电路上连接有厨余垃圾处理器,其通过小型直流或交流电机驱动刀盘,利用离心力将粉碎腔内的食物垃圾粉碎后进行挤压分离,排入下水道,粉碎腔具有过滤作用,自动拦截食物固体颗粒。
64.本实施例中使用厨余垃圾处理器的优点如下:
65.1、对居民来说:
①
减少厨房尤其是存放垃圾桶的橱柜内的臭味;
②
减少孳生蟑螂、
细菌的可能;
③
使清理排放家庭垃圾成为一项轻松干净的工作;
④
有利于保持楼梯间和居住小区的卫生环境。
66.2、对环卫部门和物业管理来说:
①
改善环卫作业环境;
②
有效减少垃圾产量;
③
减少垃圾收运过程的二次污染;
④
减少垃圾收运处理的难度和成本。
67.3、对市政和交管部门来说:
①
增加污水中易腐性有机物的含量,有利于污水处理厂的生化工艺;
②
减少垃圾车的数量和垃圾污水滴漏对路面的污染。
68.4、对环境和资源回收来说:
①
减少厨余垃圾对可回收物的污染,提高资源回收率;
②
改善填埋场和焚烧厂的处理工况,减少渗滤液、沼气、烟气等污染物的排放。
69.本实施例通过mcu处理器、称重电路、视觉传感输入电路、传输分拣控制电路、人机交互设备、消毒除臭控制电路、报警提示电路、厨余垃圾处理控制电路、电源电路以及智能垃圾分拣数据管理服务平台软件组成的等功能,对干垃圾进行分拣、消毒、压缩等处理,实现垃圾智慧城市智能管理,并结合物联网、大数据、人工智能识别等科技打造废品回收生态链,满足垃圾智慧城市智能管理的需要。
70.实施例2
71.如图1所示,一种智能垃圾分拣处理系统的分拣处理方法,基于实施例1中的一种智能垃圾分拣处理系统实现,其具体包括以下步骤:
72.步骤一、获取待分拣图像;
73.步骤二、识别所述待分拣图像后进行垃圾类别分析,并根据分析结果发送待分拣指令;
74.步骤三、根据所述待分拣指令将待分拣图像中对应的不同垃圾分拣到对应指定区域,完成垃圾分拣;
75.步骤四、对步骤三分拣后的可回收垃圾、有害垃圾、其他干垃圾和不可回收垃圾进行处理,具体处理过程依次包括消毒处理、除菌处理、压缩处理和清洁转运处理;
76.步骤五、对步骤三分拣后的厨余垃圾进行处理,具体处理过程依次包括固液分离处理、消毒除菌处理、压缩处理、污水处理和清洁转运处理。
77.本实施例中步骤一中通过视觉传感输入电路获取分拣图像;
78.步骤二具体为通过mcu处理器将所述待分拣图像进行标准化预处理,送入所述分类检测模型中进行正向推理,得到所述分拣图像中所有垃圾类别与坐标信息,并根据所述分拣图像中所有垃圾类别与坐标信息发送待分拣指令给传输分拣控制电路;
79.其中将所述待分拣图像进行标准化预处理,送入所述分类检测模型中进行正向推理具体过程为:首先,在进行垃圾分拣处理之前建立垃圾图像数据库,具体为对现有的垃圾物品进行图像输入识别,分类储存,建立一个垃圾物品分类数据库。
80.然后在数据库建立后进行垃圾分拣处理,对输入的垃圾分类识别,与数据库进行对比,根据对比结果得到分拣图像中所有垃圾类别与坐标信息。并且对无法识别或识别不准确的垃圾图像,由人工补充到数据库,完善数据库,实现最大分类的准确性。
81.步骤三具体为传输分拣控制电路根据待分拣指令生成不同的皮带传输距离信号,并根据所述不同的舵机转角信号与不同垃圾类别的对应关系,控制所述皮带传送距离,气缸推动与打开放料口,以完成垃圾的分拣。
82.其中步骤四中的各类垃圾主要包括以下部分:
83.可回收垃圾:主要包括废纸、塑料、玻璃、金属和布料五大类。废纸:主要包括报纸、期刊、图书、各种包装纸等。塑料:各种塑料袋、塑料泡沫、塑料包装(快递包装纸是其他垃圾/干垃圾)、一次性塑料餐盒餐具、硬塑料、塑料牙刷、塑料杯子、矿泉水瓶等。玻璃:主要包括各种玻璃瓶、碎玻璃片、暖瓶等。(镜子是其他垃圾/干垃圾)。金属物:主要包括易拉罐、罐头盒等。
84.其他垃圾:其他垃圾(干垃圾),包括砖瓦陶瓷、渣土、卫生间废纸、瓷器碎片等难以回收的废弃物,采取卫生填埋可有效减少对地下水、地表水、土壤及空气的污染,在当今的社会,暂时还无有效化解其他垃圾的好方法,所以须要尽量少产生。
85.厨余垃圾:厨余垃圾(湿垃圾),包括剩菜剩饭、骨头、菜根菜叶、果皮等食品类废物。对水物分离,生物技术就地处理堆肥,可作生产有机肥料。厨余垃圾含有极高的水分与有机物,很容易腐坏,产生恶臭。
86.有害垃圾:有害垃圾含有对人体健康有害的重金属、有毒的物质或者对环境造成现实危害或者潜在危害的废弃物。包括电池、荧光灯管、灯泡、水银温度计、油漆桶、部分家电、过期药品及其容器、过期化妆品等。这些垃圾-般使用单独回收或填埋处理。
87.总之,以上所述仅为本发明的较佳实施例,凡依本发明申请专利范围所作的均等变化与修饰,皆应属本发明专利的涵盖范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
