一种基于ecer131标准的制动辅助系统测试评价方法
技术领域
1.本发明涉及一种车辆技术领域,特别是涉及一种基于ece r131标准的制动辅助系统测试评价。
背景技术:
2.研究发现,90%的驾驶者遇到在紧急情况时,均不能采取快速、及时的制动措施。专利申请号2017102818051,名称为“操作车辆制动辅助系统的方法”,制动辅助系统在发生危险制动的情况下通过车辆制动装置辅助车辆的制动,并且为了区分危险制动和正常制动,确定描述车辆驾驶员的制动需求的至少两个变量,并且为每个变量建立阈值。当至少两个变量超过其特定阈值时识别危险制动,由此借助于车辆制动装置启动通过制动辅助系统的自动制动干预。此外,确定描述车辆的瞬时驾驶状况的至少一个驾驶状况变量,并且根据至少一个驾驶状况变量改变至少两个阈值。根据本发明,描述驾驶员的制动需求的第一变量由仅与可以由制动踏板致动的车辆制动装置的主制动缸中存在的制动压力相关的第一变量确定,并且描述驾驶员的制动需求的第二变量由仅与车辆制动装置的主制动缸中存在的制动压力随时间的变化相关的第二变量确定。
技术实现要素:
3.本发明旨在至少解决现有技术中存在的技术问题,特别创新地提出了一种基于ece r131标准的制动辅助系统测试评价。
4.为了实现本发明的上述目的,本发明提供了一种基于ece r131标准的制动辅助系统测试评价系统,包括待测试车辆,还包括在所述待测试车辆内设置有有用于固定安装高精度惯导定位模块的高精度惯导定位模块固定安装座、用于固定安装数据采集模块的数据采集模块固定安装座、用于固定安装转向机器人的转向机器人固定安装座、用于固定安装油门机器人的油门机器人固定安装座和用于固定安装制动机器人的制动机器人固定安装座;
5.所述高精度惯导定位模块固定安装在所述高精度惯导定位模块固定安装座上,所述数据采集模块固定安装在所述数据采集模块固定安装座上,所述转向机器人固定安装在所述转向机器人固定安装座上,所述油门机器人固定安装在所述油门机器人固定安装座上,所述制动机器人固定安装在所述制动机器人固定安装座上;
6.以及设置在待测试车辆内的用于固定安装测试控制器的测试控制器固定安装座,所述测试控制器固定安装在所述测试控制器固定安装座上;
7.所述测试控制器的采集控制端与所述数据采集模块的采集工作控制端相连,所述测试控制器的惯导定位工作端与所述高精度惯导定位模块的工作控制端相连,所述测试控制器的方向控制端与所述方向盘机器人的工作控制端相连,所述测试控制器的油门控制端与所述油门机器人的工作控制端相连,所述测试控制器的制动控制端与所述制动机器人的工作控制端相连;
8.所述数据采集模块的车辆数据端与所述待测试车辆的数据端相连,所述数据采集模块的惯导定位数据端与所述高精度惯导定位模块的惯导定位数据端相连,所述数据采集模块的转向数据端与所述转向机器人的转向数据端相连,所述数据采集模块的油门数据端与所述油门机器人的油门数据端相连,所述数据采集模块的制动数据端与所述制动机器人的制动数据端相连;
9.所述高精度惯导定位模块用于采集待测试车辆测试时准确的方位、水平、位置、速度、加速度之一或者任意组合信号;
10.所述数据采集模块用于实时采集并存储待测试车辆、高精度惯导定位模块、转向机器人、油门机器人和制动机器人之一或者任意组合信息;
11.所述转向机器人用于对待测试车辆方向盘进行顺时针转动和逆时针转动;
12.所述油门机器人用于对待测试车辆油门踏板进行油门踩踏;
13.所述制动机器人用于对待测试车辆制动踏板进行制动踩踏;
14.测试控制器向待测试车辆发出测试控制命令,待测试车辆完成测试。
15.在本发明的一种优选实施方式中,数据采集模块包括数据采集单元和数据收发单元,此时:
16.所述数据采集单元的车辆数据端与所述待测试车辆的数据端相连,所述数据采集单元的惯导定位数据端与所述高精度惯导定位模块的惯导定位数据端相连,所述数据采集单元的转向数据端与所述转向机器人的转向数据端相连,所述数据采集单元的油门数据端与所述油门机器人的油门数据端相连,所述数据采集单元的制动数据端与所述制动机器人的制动数据端相连;数据采集单元的数据收发端与数据收发单元的数据收发端相连;
17.数据收发单元将数据采集单元采集的测试数据发送至制动辅助评价云端。
18.在本发明的一种优选实施方式中,数据收发单元包括数据收发3g单元、数据收发4g单元、数据收发5g单元之一或者任意组合;
19.数据收发单元为数据收发3g单元时,数据采集3g单元的数据收发端与数据收发单元的数据3g收发端相连;
20.数据收发单元为数据收发4g单元时,数据采集4g单元的数据收发端与数据收发单元的数据4g收发端相连;
21.数据收发单元为数据收发5g单元时,数据采集5g单元的数据收发端与数据收发单元的数据5g收发端相连。
22.在本发明的一种优选实施方式中,还包括设置在待测试车辆内用于固定安装拉线位移传感器的拉线位移传感器固定安装座,所述拉线位移传感器固定安装在所述拉线位移传感器固定安装座上,所述拉线位移传感器的测量端设置在制动踏板上,所述拉线位移传感器用于测量制动机器人踩踏制动踏板时的位移值,所述测试控制器的位移工作控制端与所述拉线位移传感器的工作控制端相连,所述拉线位移传感器的位移数据端与数据采集模块的位移数据端相连。
23.在本发明的一种优选实施方式中,还包括设置在待测试车辆内用于固定安装踏板力计的踏板力计固定安装座,所述踏板力计固定安装在所述踏板力计固定安装座上,所述踏板力计的测量端设置在制动踏板上,所述踏板力计用于测量制动机器人踩踏制动踏板时的制动力,所述测试控制器的力工作控制端与所述踏板力计的工作控制端相连,所述踏板
力计的力数据端与数据采集模块的力数据端相连。
24.本发明还公开了一种基于ece r131标准的制动辅助系统测试评价方法,包括以下步骤:
25.s1,系统初始化;
26.s2,测试控制器判断待测试车辆的车速是否达到预设测试速度阈值:
27.若待测试车辆的车速未达到预设测试速度阈值,则执行下一步;
28.若待测试车辆的车速达到预设测试速度阈值,则执行步骤s4;
29.s3,判断待测试车辆的车速与预设测试速度阈值的大小关系:
30.若v0>v1,v0表示预设测试速度阈值,v1表示待测试车辆的第一车速;则测试控制器向其油门机器人发送控制信号,油门机器人接收到测试控制器发送的控制信号后,控制油门开度增大;返回步骤s2;
31.若v0<v2,v0表示预设测试速度阈值,v2表示待测试车辆的第二车速,第二车速大于第一车速;则测试控制器向其油门机器人发送控制信号,油门机器人接收到测试控制器发送的控制信号后,控制油门开度减小;返回步骤s2;
32.s4,测试控制器向其制动机器人发送控制信号,制动机器人接收到测试控制器发送的控制信号后,踩踏制动踏板;直至待测试车辆停止为止;
33.s5,重复步骤s1~s5,直至测试完成为止。
34.在本发明的一种优选实施方式中,在步骤s1中包括以下步骤:
35.s11,测试控制器向其油门机器人发送完全放开状态控制命令,油门机器人接收到测试控制器发送的完全放开状态控制命令后,油门机器人处于不踩踏油门踏板状态;测试控制器向其制动机器人发送踩踏控制命令,制动机器人接收到测试控制器发送的踩踏控制命令后,制动机器人处于踩踏制动踏板状态,防止待测试车辆滑动;
36.s12,测试控制器向其待测试车辆发送测试启动控制命令,待测试车辆接收到测试控制器发送的测试启动控制命令后,待测试车辆启动处于待命状态;
37.s13,测试控制器向其转向机器人发送方向盘回正控制命令,转向机器人接收到测试控制器发送的方向盘回正控制命令后,方向盘回正;
38.s14,测试控制器向其数据采集模块发送工作控制信息,数据采集模块接收到测试控制器发送的工作控制信息后,数据采集模块开始工作;
39.s15,测试控制器向其制动机器人发送完全放开状态控制命令,制动机器人接收到测试控制器发送的完全放开状态控制命令后,制动机器人处于不踩踏制动踏板状态;测试控制器向其油门机器人发送踩踏控制命令,油门机器人接收到测试控制器发送的踩踏控制命令后,油门机器人处于踩踏油门踏板状态;待测试车辆向前行驶;
40.s16,判断待测试车辆的车速是否达到预设测试速度第一阈值:
41.若待测试车辆的车速达到预设测试速度第一阈值,预设测试速度第一阈值小于预设测试速度阈值,则测试控制器分别向其高精度惯导定位模块、踏板力计和拉绳位移传感器发送工作控制信息,高精度惯导定位模块接收到测试控制器发送的工作控制信息后,高精度惯导定位模块开始工作,踏板力计接收到测试控制器发送的工作控制信息后,踏板力计开始工作,拉线位移传感器接收到测试控制器发送的工作控制信息后,拉线位移传感器开始工作,执行步骤s2;
42.若待测试车辆的车速小于预设测试速度第一阈值,则待测试车辆继续向前行驶,返回步骤s16。
43.在本发明的一种优选实施方式中,在步骤16中,经过预设时间阈值,若待测试车辆的车速未达到预设测试速度第一阈值,则测试控制器向油门机器人发送加大油门开度控制命令,油门机器人接收到测试控制器发送的加大油门开度控制命令后,油门开度变大。
44.在本发明的一种优选实施方式中,在步骤s5中生成减速度maf曲线、踏板力p_abs曲线、达到最大减速度所施加的最小踏板力f_abs之一或者任意组合。
45.在本发明的一种优选实施方式中,将生成的减速度maf曲线、踏板力p_abs曲线、达到最大减速度所施加的最小踏板力f_abs之一或者任意组合发送至移动智能手持终端上。
46.综上所述,由于采用了上述技术方案,本发明能够实现对待测试车辆进行测试,提升安全。
47.本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
48.本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
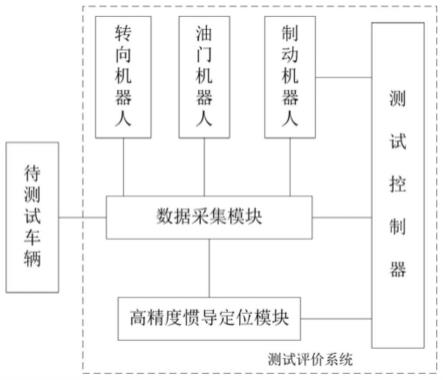
49.图1是本发明连接示意框图。
50.图2是本发明流程示意框图。
具体实施方式
51.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
52.本发明提供了一种基于ece r131标准的制动辅助系统测试评价系统,包括待测试车辆,如图1所示,还包括在所述待测试车辆内设置有有用于固定安装高精度惯导定位模块的高精度惯导定位模块固定安装座、用于固定安装数据采集模块的数据采集模块固定安装座、用于固定安装转向机器人的转向机器人固定安装座、用于固定安装油门机器人的油门机器人固定安装座和用于固定安装制动机器人的制动机器人固定安装座;
53.所述高精度惯导定位模块固定安装在所述高精度惯导定位模块固定安装座上,所述数据采集模块固定安装在所述数据采集模块固定安装座上,所述转向机器人固定安装在所述转向机器人固定安装座上,所述油门机器人固定安装在所述油门机器人固定安装座上,所述制动机器人固定安装在所述制动机器人固定安装座上;
54.以及设置在待测试车辆内的用于固定安装测试控制器的测试控制器固定安装座,所述测试控制器固定安装在所述测试控制器固定安装座上;
55.所述测试控制器的采集控制端与所述数据采集模块的采集工作控制端相连,所述测试控制器的惯导定位工作端与所述高精度惯导定位模块的工作控制端相连,所述测试控制器的方向控制端与所述方向盘机器人的工作控制端相连,所述测试控制器的油门控制端与所述油门机器人的工作控制端相连,所述测试控制器的制动控制端与所述制动机器人的
工作控制端相连;
56.所述数据采集模块的车辆数据端与所述待测试车辆的数据端相连,所述数据采集模块的惯导定位数据端与所述高精度惯导定位模块的惯导定位数据端相连,所述数据采集模块的转向数据端与所述转向机器人的转向数据端相连,所述数据采集模块的油门数据端与所述油门机器人的油门数据端相连,所述数据采集模块的制动数据端与所述制动机器人的制动数据端相连;
57.所述高精度惯导定位模块用于采集待测试车辆测试时准确的方位、水平、位置、速度、加速度之一或者任意组合信号;
58.所述数据采集模块用于实时采集并存储待测试车辆、高精度惯导定位模块、转向机器人、油门机器人和制动机器人之一或者任意组合信息;
59.所述转向机器人用于对待测试车辆方向盘进行顺时针转动和逆时针转动;
60.所述油门机器人用于对待测试车辆油门踏板进行油门踩踏;
61.所述制动机器人用于对待测试车辆制动踏板进行制动踩踏;
62.测试控制器向待测试车辆发出测试控制命令,待测试车辆完成测试;测试完成后,将数据采集模块采集的测试数据发送至制动辅助评价云端进行评价分析。
63.在本发明的一种优选实施方式中,数据采集模块包括数据采集单元和数据收发单元,此时:
64.所述数据采集单元的车辆数据端与所述待测试车辆的数据端相连,所述数据采集单元的惯导定位数据端与所述高精度惯导定位模块的惯导定位数据端相连,所述数据采集单元的转向数据端与所述转向机器人的转向数据端相连,所述数据采集单元的油门数据端与所述油门机器人的油门数据端相连,所述数据采集单元的制动数据端与所述制动机器人的制动数据端相连;数据采集单元的数据收发端与数据收发单元的数据收发端相连;
65.数据收发单元将数据采集单元采集的测试数据发送至制动辅助评价云端。
66.在本发明的一种优选实施方式中,数据收发单元包括数据收发3g单元、数据收发4g单元、数据收发5g单元之一或者任意组合;
67.数据收发单元为数据收发3g单元时,数据采集3g单元的数据收发端与数据收发单元的数据3g收发端相连;
68.数据收发单元为数据收发4g单元时,数据采集4g单元的数据收发端与数据收发单元的数据4g收发端相连;
69.数据收发单元为数据收发5g单元时,数据采集5g单元的数据收发端与数据收发单元的数据5g收发端相连。
70.在本发明的一种优选实施方式中,还包括设置在待测试车辆内用于固定安装拉线位移传感器的拉线位移传感器固定安装座,所述拉线位移传感器固定安装在所述拉线位移传感器固定安装座上,所述拉线位移传感器的测量端设置在制动踏板上,所述拉线位移传感器用于测量制动机器人踩踏制动踏板时的位移值,所述测试控制器的位移工作控制端与所述拉线位移传感器的工作控制端相连,所述拉线位移传感器的位移数据端与数据采集模块的位移数据端相连。
71.在本发明的一种优选实施方式中,还包括设置在待测试车辆内用于固定安装踏板力计的踏板力计固定安装座,所述踏板力计固定安装在所述踏板力计固定安装座上,所述
踏板力计的测量端设置在制动踏板上,所述踏板力计用于测量制动机器人踩踏制动踏板时的制动力,所述测试控制器的力工作控制端与所述踏板力计的工作控制端相连,所述踏板力计的力数据端与数据采集模块的力数据端相连。
72.本发明还公开了一种基于ece r131标准的制动辅助系统测试评价方法,如图2所示,包括以下步骤:
73.s1,系统初始化;
74.s2,测试控制器判断待测试车辆的车速是否达到预设测试速度阈值:
75.若待测试车辆的车速未达到预设测试速度阈值,则执行下一步;
76.若待测试车辆的车速达到预设测试速度阈值,则执行步骤s4;
77.s3,判断待测试车辆的车速与预设测试速度阈值的大小关系:
78.若v0>v1,v0表示预设测试速度阈值,v1表示待测试车辆的第一车速;则测试控制器向其油门机器人发送控制信号,油门机器人接收到测试控制器发送的控制信号后,控制油门开度增大;返回步骤s2;
79.若v0<v2,v0表示预设测试速度阈值,v2表示待测试车辆的第二车速,第二车速大于第一车速;则测试控制器向其油门机器人发送控制信号,油门机器人接收到测试控制器发送的控制信号后,控制油门开度减小;返回步骤s2;
80.s4,测试控制器向其制动机器人发送控制信号,制动机器人接收到测试控制器发送的控制信号后,踩踏制动踏板;直至待测试车辆停止为止;
81.s5,重复步骤s1~s5,直至测试完成为止;对待测试车辆进行评价。
82.在本发明的一种优选实施方式中,在步骤s1中包括以下步骤:
83.s11,测试控制器向其油门机器人发送完全放开状态控制命令,油门机器人接收到测试控制器发送的完全放开状态控制命令后,油门机器人处于不踩踏油门踏板状态;测试控制器向其制动机器人发送踩踏控制命令,制动机器人接收到测试控制器发送的踩踏控制命令后,制动机器人处于踩踏制动踏板状态,防止待测试车辆滑动;
84.s12,测试控制器向其待测试车辆发送测试启动控制命令,待测试车辆接收到测试控制器发送的测试启动控制命令后,待测试车辆启动处于待命状态;
85.s13,测试控制器向其转向机器人发送方向盘回正控制命令,转向机器人接收到测试控制器发送的方向盘回正控制命令后,方向盘回正;
86.s14,测试控制器向其数据采集模块发送工作控制信息,数据采集模块接收到测试控制器发送的工作控制信息后,数据采集模块开始工作;
87.s15,测试控制器向其制动机器人发送完全放开状态控制命令,制动机器人接收到测试控制器发送的完全放开状态控制命令后,制动机器人处于不踩踏制动踏板状态;测试控制器向其油门机器人发送踩踏控制命令,油门机器人接收到测试控制器发送的踩踏控制命令后,油门机器人处于踩踏油门踏板状态;待测试车辆向前行驶;
88.s16,判断待测试车辆的车速是否达到预设测试速度第一阈值:
89.若待测试车辆的车速达到预设测试速度第一阈值,预设测试速度第一阈值小于预设测试速度阈值,则测试控制器分别向其高精度惯导定位模块、踏板力计和拉绳位移传感器发送工作控制信息,高精度惯导定位模块接收到测试控制器发送的工作控制信息后,高精度惯导定位模块开始工作,踏板力计接收到测试控制器发送的工作控制信息后,踏板力
计开始工作,拉线位移传感器接收到测试控制器发送的工作控制信息后,拉线位移传感器开始工作,执行步骤s2;
90.若待测试车辆的车速小于预设测试速度第一阈值,则待测试车辆继续向前行驶,返回步骤s16。
91.在本发明的一种优选实施方式中,在步骤16中,经过预设时间阈值,若待测试车辆的车速未达到预设测试速度第一阈值,则测试控制器向油门机器人发送加大油门开度控制命令,油门机器人接收到测试控制器发送的加大油门开度控制命令后,油门开度变大。
92.在本发明的一种优选实施方式中,在步骤s5中生成减速度maf曲线、踏板力p_abs曲线、达到最大减速度所施加的最小踏板力f_abs之一或者任意组合。
93.在本发明的一种优选实施方式中,将生成的减速度maf曲线、踏板力p_abs曲线、达到最大减速度所施加的最小踏板力f_abs之一或者任意组合发送至移动智能手持终端上。将生成的减速度maf曲线、踏板力p_abs曲线、达到最大减速度所施加的最小踏板力f_abs之一或者任意组合发送至移动智能手持终端上的方法包括以下步骤:
94.第一步,将生成的减速度maf曲线图像、踏板力p_abs曲线图像和达到最大减速度所施加的最小踏板力f_abs图像放置于待发送图像文件夹中;令η=1;
95.第二步,对待发送图像文件夹中的图像执行以下操作:
96.imagename
η
=image package name calculationmethod(image content
η
),
97.其中,imagename
η
表示第η图像的图像名称;
98.image package name calculation method()表示图像名称运算函数;优选采用md5或者sha-1;
99.image content
η
表示第η图像;
100.将第η图像的图像名称imagename
η
作为第η图像的名称;
101.第三步,判断η与φ的大小关系:
102.若η≥φ,φ表示待发送图像文件夹中图像的总张数,则执行下一步;
103.若η《φ,则η=η 1;返回第二步;
104.第三步,利用压缩软件(例如rar、zip或7z)对待发送图像文件夹进行压缩,得到其压缩图像包;
105.第四步,将压缩图像包发送至用户智能手持移动终端上的app上;令
106.第五步,智能手持移动终端接收到数据包后,对数据包进行解压,得到解压图像包,对解压图像包中的图像执行以下操作:
107.imagename
′
η
′
=image package name calculationmethod(image content
′
η
′
),
108.其中,imagename
′
η
′
表示第η
′
图像的计算名称;
109.image package name calculation method()表示图像名称运算函数;
110.image content
′
η
′
表示解压图像包中的第η
′
图像;
111.判断第η
′
图像的计算名称imagename
′
η
′
与解压图像包中的第η
′
图像的图像名称是否一致:
112.若第η
′
图像的计算名称imagename
′
η
′
与解压图像包中的第η
′
图像的图像名称一致,则η
′
=η
′
1;返回第五步,直至η
′
=φ 1为止;执行第六步;
113.若第η
′
图像的计算名称imagename
′
η
′
与解压图像包中的第η
′
图像的图像名称不一
致,则图像损坏,重新请求发送;返回第四步;
114.第六步,将解压图像包中的图像展现在智能手持移动终端屏幕上,起到数据的安全以及用户了解待测试车辆的测试结果。
115.在本发明的一种优选实施方式中,在步骤s5中对待测试车辆进行评价的方法包括以下步骤:
116.s51,获取待测试车辆启动激活防抱死制动系统abs时的踏板力计的制动力;
117.s52,判断待测试车辆启动激活防抱死制动系统abs时的踏板力计的制动力是否在预设制动力阈值范围内:
118.若待测试车辆启动激活防抱死制动系统abs时的踏板力计的制动力在预设制动力阈值范围内,则待测试车辆合格;
119.若待测试车辆启动激活防抱死制动系统abs时的踏板力计的制动力大于预设制动力阈值内,f0=max[f],f0表示预设制动力阈值,max[]表示取最大值函数,f表示预设制动力阈值范围;则待测试车辆不合格;
[0120]
或者,s5-1,获取待测试车辆拉绳位移传感器的位移值,根据获取的待测试车辆拉绳位移传感器的位移值计算得到制动踏板速度值,制动踏板速度值的计算方法为:
[0121][0122]
其中,μ表示制动踏板与拉绳位移传感器间的位置系数;
[0123]
表示t1时刻时拉伸位移传感器共计拉出绳长,即拉线位移传感器的测量端与拉线位移传感器的拉出口端间的长度;
[0124]
表示表示t2时刻时拉伸位移传感器共计拉出绳长;
[0125]
t1表示第一时刻;
[0126]
t2=t
1-t0,
[0127]
t1表示第一时刻;
[0128]
t0表示预设间隔时间阈值;
[0129]
t2表示第二时刻;
[0130]vη
表示制动踏板速度;
[0131]
s5-2,判断制动踏板速度值是否大于等于预设启动速度阈值:
[0132]
若制动踏板速度值大于等于预设启动速度阈值,则执行下一步;
[0133]
若制动踏板速度值小于预设启动速度阈值,则返回步骤s5-1;
[0134]
s5-3,判断待测试车辆是否启动激活防抱死制动系统abs:
[0135]
若待测试车辆启动激活防抱死制动系统abs,则待测试车辆合格;
[0136]
若待测试车辆未启动激活防抱死制动系统abs,则待测试车辆不合格。
[0137]
尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解:在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。