1.本公开一般涉及地下管线测绘技术领域,具体涉及一种应用于地下管道的三维姿态及长度测量装置及方法。
背景技术:
2.随着城市建设的迅速发展,地下管线网络系统日益发达,如何准确掌握地下管线的位置信息,科学利用地下空间,消除潜在的安全隐患尤为重要。特别是电力电缆、通讯电缆、燃气、给排水管线、石油等行业常常需要穿越铁路、公路、河流等障碍物铺设管线,如何精准地策略地下管道的位置与埋深,已成为亟需解决的问题。而惯性陀螺仪定位技术作为地下管线测量的一种新技术,具有定位精度高、不受周围环境和电磁干扰等优点,已经成为地下管道勘察的重要技术手段。
3.在用陀螺仪为核心的惯性测量装置,其工作原理如图1所示,勘察过程大致如下:
4.1、对待测管道2端的管口进行测量,获得2端口的三维坐标数据。对管道进行吹扫、风机引线等准备工作;
5.2、连接牵引线连接陀螺仪和卷扬机,静止后,对管道内惯性测量装置进行3个往返的匀速运动,获取运动轨迹的陀螺仪姿态、惯性、里程、时间等数据,然后把数据下载至电脑进行解算,结合起始点2端口的三维坐标数据形成6条独立的管道三维坐标轨迹;利用5条或6条原始管道轨迹三维坐标数据,进行拟合计算,形成管道轨迹陀螺仪测量的成果数据。
6.3、在解算软件中,可以了解6条独立的管道三维坐标轨迹的相对位置关系,获取各轨迹的平面最大离散值和垂直方向的最大离散值。
7.在用惯性陀螺仪定位技术对地下管道进行测量的过程中,地下管道的定位精度和诸多因素相关,其中惯性测量装置的运动速度是对最后的结算结果产生影响的一个重要因素。
技术实现要素:
8.鉴于现有技术中的上述缺陷或不足,期望提供一种应用于地下管道的三维姿态及长度测量装置及方法。
9.第一方面本技术提供一种应用于地下管道的三维姿态及长度测量装置,包括:
10.主机组件,其长度方向为第一方向,其内安装有惯性测量单元;
11.两个支架组件,分别安装在所述主机组件的两端;所述支架组件设有用于与地下管道的内壁贴合的里程轮;所述支架组件的端部与卷扬机的牵引绳固定连接,所述测量装置通过所述卷扬机的牵引力在地下管道内往复运动;
12.失速检测组件,安装在牵引绳靠近所述支架组件的一端,用于检测所述牵引绳的松弛状态;
13.调节组件,包括:
14.橡胶片,可移动地嵌入在所述里程轮通道内,所述通道的延伸方向为第二方向;所
述里程轮的穿过所述通道的径向线与所述通道侧壁的夹角范围为45度-75度,所述夹角的开口方向朝向里程轮的内部;且当所述橡胶片对应的里程轮轮面与管道内壁接触时,所述夹角的开口位于所述里程轮靠近其前进方向的一侧;
15.第一驱动机构,用于接收所述失速检测组件的检测信号,并根据所述检测信号驱动所述橡胶片沿所述第二方向移动以使得所述橡胶片伸入或伸出所述通道。
16.根据本技术实施例提供的技术方案,所述牵引绳包括主牵引绳和辅助牵引绳;所述失速检测组件包括:
17.定位板,中心垂直于所述第一方向安装在所述支架组件的端部;
18.轻质牵引板,平行于所述定位板设置,通过辅助牵引绳与所述定位板的中心固定连接;
19.接绳孔,设置于所述牵引板远离所述定位板的一侧,用于与所述主牵引绳连接;
20.失速检测传感单元,安装在所述定位板与所述牵引板之间,用于检测所述辅助牵引绳的松弛状态。
21.根据本技术实施例提供的技术方案,所述失速检测传感单元包括:
22.红外测距传感器,安装在所述定位板靠近所述牵引板的一侧,用于检测所述定位板与牵引板之间的距离。
23.根据本技术实施例提供的技术方案,所述失速检测传感单元包括:
24.弹性件,两端分别卡接在所述定位板与牵引板上;所述弹性件的两端均设置有第一表面,所述定位板及牵引板上设有与所述第一表面接触的第二表面;
25.压力传感器,安装在所述第一表面或第二表面上。
26.根据本技术实施例提供的技术方案,所述里程轮垂直于其中心轴线的端面开设有一圈与其同心设置的环形槽;所述调节组件还包括:
27.环形齿板,同心设置于所述环形槽内,其靠近所述里程轮中心的一面设有齿面;所述橡胶片的一端固定在所述环形齿板远离所述齿面的一侧;所述环形齿板具有沿其轴线方向排列的第一端和第二端,所述第一端插入所述环形槽的侧壁上;
28.所述第一驱动机构为微型电机,其固定在所述环形槽内,其输出轴上同轴固定有驱动齿轮;所述驱动齿轮与所述齿面啮合;
29.环形封口盖板,与所述环形齿板的第二端插接;且通过螺栓固定在所述里程轮上。
30.根据本技术实施例提供的技术方案,每个所述里程轮上设有两组调节组件,两组所述调节组件的橡胶片在里程轮的轴线方向对应排列,且两组调节组件中两个对应橡胶片的移动方向在里程轮的中心面上分别具有第一投影线和第二投影线;所述中心面为通过所述里程轮的中心且平行于所述第二方向的平面;所述第一投影线和第二投影线在所述中心面上具有第一交点;所述第一投影线和第二投影线以所述第一交点与所述中心面的中点连线对称设置。
31.根据本技术实施例提供的技术方案,所述辅助牵引绳的至少一端固定安装有安装盘,所述安装盘与所述定位板或牵引板之间通过扭簧连接。
32.根据本技术实施例提供的技术方案,所述支架组件包括:中轴杆、第一支座和第二支座;所述第一支座与中轴杆的底部固定连接,所述中轴杆处于第一支座的中垂线的位置;所述中轴杆从第二支座的中空部穿过,中轴杆远离第二支座的一侧设置有调节手轮,调节
手轮与第二支座之间的中轴杆套有弹簧;第二支座的中空部的孔径大于套有弹簧处的中轴杆的杆径,且小于中轴杆其他位置的杆径;若干所述里程轮通过若干对支架臂设置在第一支座和第二支座之间;
33.所述中轴杆上在所述弹簧与所述调节手轮之间还套接有预调节盘;所述预调节盘的圆周面上安装有预测距激光传感器,用于测量所述预调节盘的外周面与管道内壁之间的距离;所述预调节盘内绕所述中轴杆圆周排列有至少3个调节电机,所述调节电机的输出轴上同轴安装有收绳轮,所述收绳轮上缠绕有预收绳,所述预收绳的端部与所述第二支座固定连接;
34.所述预调节盘内还设有预调节控制单元,所述预调节控制单元用于接收所述预测距激光传感器的预测距离信号,并根据所述预测距离信号控制所述调节电机动作以预调节里程轮距离中轴杆的距离。
35.根据本技术实施例提供的技术方案,包括以下步骤:
36.接收所述失速检测组件的失速检测信号s
测
;
37.从状态数据库中读取橡胶片的当前状态信号为第k状态信号,1≤k≤n;所述橡胶片的状态信号包括第1状态信号.....第n状态信号;n大于等于2;第1状态至第n状态变化时,所述橡胶片伸出于里程轮的长度越来越长;其中第1状态信号对应橡胶片完全伸入里程轮内的状态,至少一种状态信号对应橡胶片伸出里程轮的状态;所述状态数据库存储有所有状态信号及其对应的失速检测信号s
测
的数据范围;所述状态信号设有当前状态数据标识位;
38.判断所述失速检测信号s
测
等于设定检测信号s
设
,且判断当前状态信号为第m状态信号时,2≤m≤n;启动电机转动θ*(m-1)角度,以将所述橡胶片缩回至里程轮内;其中θ为设定步进角度;
39.判断所述失速检测信号s
测
小于设定检测信号s
设
时,从所述状态数据库中读取与所述失速检测信号s
测
所在的数据范围对应的第p状态信号;启动电机转动θ*(p-k)角度,以将所述橡胶片伸长至对应的状态。
40.根据本技术实施例提供的技术方案,还包括以下步骤:
41.接收预测距激光传感器检测的距离信号l
测
;
42.判断l
测
小于等于l
设
时,l
设
=r
1-r2;根据以下公式(1)至公式(4)确定调节电机的调节角度w;
43.b0=l
支
*sin(α/2)(1)
44.b1=[r
1-r
1-(l
设-l
测
)]/tanβ(2)
[0045]
sinβ=[r
1-r
1-(l
设-l
测
)]/l
支
(3)
[0046]
w=[180*(b
1-b0)]/π*r2(4)
[0047]
其中α为上述一对支架臂的原始夹角;l
支
为初始状态下里程轮的中心沿平行于支架臂的长度方向延伸至与中轴杆的中心轴线相交点的长度;r1为被测地下管道的内径;r1为里程轮的半径;r2为调节电机输出轴的半径;r2为预调节盘的半径;
[0048]
控制所述调节电机旋转调节角度w以通过预收绳拉动第二支座使得里程轮进行预收缩。
[0049]
本技术的技术方案中,通过在测量装置的支架组件的端部设置失速检测组件,以
检测测量装置在管道内的下坡段俯冲下行时,测量装置失速导致牵引绳松弛的状态,也即检测测量装置的运动速度与牵引绳的牵引速度不一致的状态,及时地通过调节组件调节设置在里程轮里的橡胶片,使得橡胶片伸出于里程轮的表面,进而增加里程轮与管道内壁的摩擦力,以降低测量装置的移动速度,使得其与牵引绳的速度匹配,本装置给测量装置的匀速运动提供了保证,进而提高了整个惯性测量系统的测量精度。
附图说明
[0050]
通过阅读参照以下附图所作的对非限制性实施例所作的详细描述,本技术的其它特征、目的和优点将会变得更明显:
[0051]
图1为惯性测量装置检测地下管道的结构示意图;
[0052]
图2为本技术实施例1中测量装置检测的结构示意图;
[0053]
图3为实施例1中支架组件的结构示意图;
[0054]
图4为实施例1中失速检测传感单元的结构示意图;
[0055]
图5为实施例1中里程轮的剖视结构示意图;
[0056]
图6为图5中a-a’和b-b’的半剖结构示意图;
[0057]
图7为里程轮的中心面结构示意图;
[0058]
图8为实施例1中测量装置检测地下管道的结构示意图;
[0059]
图9为实施例2的结构示意图;
[0060]
图10为实施例3的结构示意图;
[0061]
图11为实施例3的调节原理图;
[0062]
图中标号
[0063]
100、主机组件;200、支架组件;300、卷扬机;310、牵引绳;210、里程轮;220、中轴杆;230、第一支座;240、第二支座;250、调节手轮;260、弹簧;270、支架臂;271、第一支架臂;272、第二支架臂;311、主牵引绳;312、辅助牵引绳;410、定位板;420、牵引板;441、红外测距传感器;442、弹性件;443、第一表面;444、第二表面;445、压力传感器;446、安装板;510橡胶片;530环形齿板;520、第一驱动机构;531、齿面;211、环形槽;212a、第一投影线;212b、第二投影线;213、中点连线;540、封口盖板;212、通道;600、管道;610、第一端口;620、第二端口;440a、第一失速检测传感单元;440b、第二失速检测传感单元;313a、主体部;313b、凸出部;313c、扭簧;281、预测距激光传感器;282、调节电机;283、预收绳;700、障碍物。
具体实施方式
[0064]
下面结合附图和实施例对本技术作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释相关发明,而非对该发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与发明相关的部分。
[0065]
需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本技术。
[0066]
实施例1
[0067]
请参考图2,本实施例提供一种应用于地下管道的三维姿态及长度测量装置,包括:
[0068]
主机组件100,其长度方向为第一方向(图2中箭头a的方向),其内安装有惯性测量单元;惯性测量单元(imu)用于测量物体三轴姿态角(或角速率)以及加速度。一个imu包含了三个单轴的加速度计和三个单轴的陀螺,加速度计检测物体在载体坐标系统独立三轴的加速度信号,而陀螺检测载体相对于导航坐标系的角速度信号,测量物体在三维空间中的角速度和加速度,并以此解算出物体的姿态。本实施例中,主机组件100采用dt-gxy-200系列管道三维姿态测量仪中的主机组件,如公开号为cn207600332u的专利中公开的那样,在此不赘述;
[0069]
两个支架组件200,分别安装在所述主机组件的两端;所述支架组件设有用于与地下管道的内壁贴合的里程轮210;所述支架组件的端部与卷扬机300的牵引绳310固定连接,所述测量装置通过所述卷扬机的牵引力在地下管道内往复运动;
[0070]
具体的,如图3所示以其中一个支架组件为例说明,本实施例中,支架组件200包括:中轴杆220、第一支座230和第二支座240;所述第一支座230与中轴杆220的底部(图3中的右端部分)固定连接,所述中轴杆220处于第一支座230的中垂线的位置;所述中轴杆220从第二支座240的中空部穿过,中轴杆220远离第二支座240的一侧设置有调节手轮250,调节手轮250与第二支座240之间的中轴杆220套有弹簧260;第二支座240的中空部的孔径大于套有弹簧260处的中轴杆230的杆径,且小于中轴杆220其他位置的杆径;若干所述里程轮210通过若干对支架臂270设置在第一支座230和第二支座240之间;也即,每对支架臂270包括第一支架臂271和第二支架臂272,第一支架臂271和第二支架臂272邻近的一端同时与里程轮210的轴线可转动连接,第一支架臂271和第二支架臂272相互远离的一端分别与第一支座230和第二支座240可转动连接;其中第一支架臂271和第二支架臂272的初始夹角为α,α为钝角;在本实施例中,一个支架组件上设有三个里程轮。
[0071]
当整个测量装置在管道内行走时,通过弹簧260的作用力使得第一支架臂271和第二支架臂272张开保持夹角α,从而使得里程轮保持与管道内壁贴合,实现在管道内行走。当遇到障碍物时,障碍物挤压里程轮,里程轮210将挤压力传递给支架臂270,支架臂270挤压弹簧260,使得第一支架臂271和第二支架臂272的夹角变大,以使得里程轮之间的距离变小,从而适应性地跨过障碍物。
[0072]
所述支架组件还包括锁紧手轮、支架底座,支架底座设置在第一支座的底部,锁紧手轮设置在支架底座的底部,锁紧手轮的内表面设置有螺纹,主机组件的两端设置有对应的螺纹接头。
[0073]
具体地,所述牵引绳310包括主牵引绳311和辅助牵引绳312;本装置还设有失速检测组件,安装在牵引绳310靠近所述支架组件200的一端,用于检测所述牵引绳310的松弛状态;如图3所示,所述失速检测组件包括:
[0074]
定位板410,中心垂直于所述第一方向安装在所述支架组件200的端部;具体地,定位板410为塑料板,其与中轴杆220远离主机组件100的端部螺纹连接;
[0075]
轻质牵引板420,平行于所述定位板410设置,通过辅助牵引绳312与所述定位板410的中心固定连接;在本实施例中,轻质牵引板420为由塑料壳包裹泡棉板制成;其中定位板410可以固定安装在中轴杆220的端部,辅助牵引绳312一端与中轴杆220的端部固定连接,另一端与牵引板420固定连接。
[0076]
定位板410和牵引板420的相对面中部均设有穿绳孔,用于与辅助牵引绳312的两
端固定连接。
[0077]
接绳孔,设置于所述牵引板420远离所述定位板410的一端,用于与所述主牵引绳311连接;
[0078]
失速检测传感单元440,安装在所述定位板与所述牵引板之间,用于检测所述辅助牵引绳的松弛状态。其中,失速检测传感单元440可选地采用以下任意一种方式:
[0079]
方式一:所述失速检测传感单元440包括:
[0080]
红外测距传感器441,安装在所述定位板靠近所述牵引板420的一侧,用于检测所述定位板与牵引板之间的距离。在本实施例中,红外测距传感器441采用型号为gp2y0e03的红外测距传感器模块,其测距范围为4-50cm。在本实施例中,辅助牵引绳312的长度范围为5-15cm。
[0081]
如图1所示,当测量装置在管道的下坡段做俯冲运动时,由于下坡段的倾斜程度不同,测量装置容易在该该管段失速,失速时,卷扬机的收放绳的速度将不可准确表征测量装置的运动速度,本实施例中,通过红外测距传感器441检测定位板410与牵引板420之间的距离,当卷扬机的牵引速度与测量装置的移动速度一致时,辅助牵引绳312处于拉直的状态,此时卷扬机的收放绳的速度可表征测量装置的运动速度,当测量装置在俯冲时,由于重力加速度失速时,牵引绳310中的辅助牵引绳312优先松弛,使得定位板410与牵引板420之间距离变小;本实施例通过红外测距传感器441及时地检测定位板410与牵引板420之间的距离,进而及时地发现辅助牵引绳312的松弛状态。
[0082]
方式一:如图4所示,所述失速检测传感单元440包括:
[0083]
弹性件442,两端分别卡接在所述定位板410与牵引板420之间;所述弹性件442的两端均设置有第一表面443,所述定位板及牵引板上设有与所述第一表面443接触的第二表面444;
[0084]
压力传感器445,安装在所述第一表面443或第二表面444上。
[0085]
本实施例中,压力传感器采用型号为znhm-iix的平面盒式测力传感器。弹性件442采用形变力小于2n的塑料弹簧,其两端固定连接有安装板446;其中第一表面443设置在两个安装板446的相互远离的一端;当辅助牵引绳312张紧时,弹性件442处于自然状态,当测量装置失速时,辅助牵引绳312松弛,弹性件442被压缩,压力传感器445被挤压,进气及时地检测到辅助牵引绳312的松弛状态。
[0086]
其中,本实施例中,调节组件500,如图5和图6所示,包括:
[0087]
橡胶片510,可移动地嵌入在所述里程轮210通道212内,所述通道212的延伸方向为第二方向(图5中箭头b的方向);所述里程轮210的穿过所述通道212的径向线与所述通道侧壁的夹角ψ范围为45度-75度,所述夹角ψ的开口方向朝向里程轮210的内部;且当所述橡胶片510对应的里程轮210轮面与管道600内壁接触时,所述夹角ψ的开口方向靠近所述里程轮前进方向(图5中箭头c的方向);
[0088]
第一驱动机构520,用于接收所述失速检测组件的检测信号,并根据所述检测信号驱动所述橡胶片510沿所述第二方向移动,以使得所述橡胶片伸入或伸出所述通道。
[0089]
所述里程轮210垂直于其中心轴线的端面开设有一圈与其同心设置的环形槽211;所述调节组件还包括:
[0090]
环形齿板530,同心设置与所述环形槽211内,其靠近所述里程轮210中心的一面设
有齿面531;所述橡胶片510的一端固定在所述环形齿板530远离所述齿面531的一侧;所述环形齿板530具有沿其轴线方向排列的第一端和第二端,所述第一端插入所述环形槽211的侧壁上;
[0091]
所述第一驱动机构520为微型电机,其型号为szga25rp,其固定在所述环形槽211内,其输出轴上同轴固定有驱动齿轮521;所述驱动齿轮521与所述齿面531啮合;在本实施例中,第一驱动机构520为非自锁电机,其停止工作时,其输出轴可在外力作用下转动。
[0092]
环形封口盖板540,与所述环形齿板530的第二端插接;且通过螺栓固定在所述里程轮210上。
[0093]
其中,上述红外测距传感器441或压力传感器445与第一驱动机构520的控制模块信号连接,当第一驱动机构520的控制模块接收到反应辅助牵引绳312松弛的信号时,驱动微型电机转动,以带动橡胶片510伸出里程轮210的圆周面,进而增加里程轮与管道内壁的摩擦力,以对测量装置进行减速,使得其与牵引绳的速度相匹配。
[0094]
其中,橡胶片510的数量为多个,均匀分布在里程轮的圆周方向。
[0095]
本实施例中,里程轮210内的通道212靠近里程轮210表面的端口为橡胶片510的伸出口,在本实施例中,通道212为直线通道,其延伸方向即为第二方向;第二方向与里程轮径向线的夹角为图中的夹角β,在本实施例中,所述夹角的开口方向朝向里程轮210的内部,且朝向测量装置的前进方向(图中的箭头c方向)一侧。因此,当图6中的里程轮210顺时针转动前进的时候,伸出的橡胶片510被挤压与里程轮210的外周面压合,与里程轮210的运动方向相适应。
[0096]
由于测量装置需要在管道内往复运动,因此,本实施例中,每个所述里程轮上设有两组调节组件,如图4所示,两组调节组件中通道的延伸方向对称设置,其中图5中的a-a’半剖视图和b-b’半剖视图均如图6所示,如图7所示,两组所述调节组件的橡胶片在里程轮的轴线方向对应排列,且两组调节组件中两个对应橡胶片的移动方向在里程轮的中心面上分别具有第一投影线212a和第二投影线212b;所述中心面为通过所述里程轮的中心且平行于所述第二方向的平面;所述第一投影线和第二投影线在所述中心面上具有第一交点;也即第一投影线212a和第二投影线212b为两组调节组件中的对应橡胶片所在的通道中心线在所述中心面的投影线,所述第一投影线212a和第二投影线212b以所述第一交点与所述中心面的中点连线213对称设置。
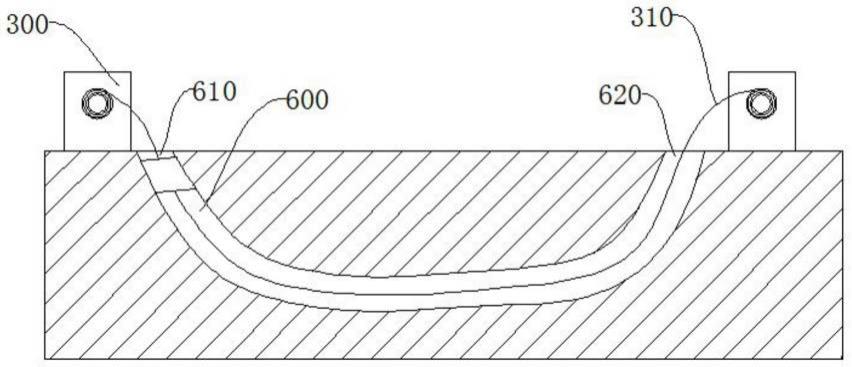
[0097]
如果将被测管道600的两个端口设为第一端口610和第二端口620,两组调节组件分别为第一调节组件和第二调节组件,设置在靠近第一端口610的支架组件上的失速检测传感单元为第一失速检测传感单元440a,设置在靠近第二端口620的支架组件上的失速检测传感单元为第二失速检测传感单元440b;当测量装置从第一端口610运动至第二端口620时其运动方向为图8中的箭头d方向,当测量装置从第二端口620运动至第一端口610时,其运动方向为图8中的箭头e方向,则:
[0098]
第一失速检测传感单元440a与第一调节组件的第一驱动机构520信号连接,当测量装置沿箭头e运动时,第一失速检测传感单元440a用于检测箭头e方向运动时的俯冲失速;第一调节组件的第一驱动机构520用于里程轮逆时针转动时,提供橡胶片的伸出驱动力,以增加里程轮与管道内壁的摩擦力;
[0099]
第二失速检测传感单元440b与第二调节组件的第一驱动机构520信号连接,当测
量装置沿箭头d运动时,第二失速检测传感单元440b用于检测箭头d方向运动时的俯冲失速。第二调节组件的第一驱动机构520用于里程轮顺时针转动时,提供橡胶片的伸出驱动力,以增加里程轮与管道内壁的摩擦力。
[0100]
实施例2
[0101]
本实施例在实施例1的基础上,如图9所示,所述辅助牵引绳312的至少一端固定安装有安装盘,所述安装盘与所述定位板或牵引板之间通过扭簧连接。
[0102]
以安装盘与定位板连接为例说明,安装盘为凸台状,其包括圆柱状的主体部313a和位主体部313a一端的凸出部313b;其中定位板上开设有卡槽411,其中凸出部313b绕主体部313a的轴线可转动地卡于卡槽411内;扭簧313c套在主体部313a外,扭簧313c的一端固定在所述凸出部313b外壁,另一端固定在定位板410上。
[0103]
在测量装置的行走过程中,由于管线的抛物线状,使得测量装置受到牵引绳的牵引方向往往不与主机组件的长度方向,也即第一方向平行,严重时,由于牵引力持续产生垂直于第一方向的分力,使得测量装置在被测管道内螺旋式行走,该行走方式也极大地影响测量装置测量数据的准确性,本实施例通过采用辅助牵引绳312的安装盘和扭簧的连接方式,使得扭簧可以吸收部分垂直于第一方向的分力,进而减少测量装置在管道内螺旋式行走的情况发生,进一步提高了测量装置最后测量数据的准确性。
[0104]
实施例3
[0105]
本实施例在实施例1的基础上,如图10所示所述支架组件200所述中轴杆220上在所述弹簧260与所述调节手轮250之间还套接有预调节盘280;所述预调节盘280的圆周面上安装有预测距激光传感器281,用于测量所述预调节盘280的外周面与管道内壁之间的距离;所述预调节盘280内绕所述中轴杆圆周排列有至少3个调节电机282,所述调节电机的输出轴上同轴安装有收绳轮,所述收绳轮上缠绕有预收绳283,所述预收绳283的端部与所述第二支座240固定连接;
[0106]
所述预调节盘280内还设有预调节控制单元285,所述预调节控制单元285用于接收所述预测距激光传感器281的预测距离信号,并根据所述预测距离信号控制所述调节电机282动作以预调节里程轮210距离中轴杆220的距离。在本实施例中,调节电机为型号为37gb520,其中预调节控制单元为由arm处理器为核心的处理电路单元。具体的,预调节控制单元根据以下步骤进行预调节:
[0107]
s10、接收预测距激光传感器检测的距离信号l
测
;
[0108]
s20、判l
测
小于l
设
时,l
设
=r
1-r2;断根据以下公式(1)至公式(4)确定调节电机的调节角度w;
[0109]
b0=l
支
*sin(α/2)(1)
[0110]
b1=[r
1-r
1-(l
设-l
测
)]/tanβ(2)
[0111]
sinβ=[r
1-r
1-(l
设-l
测
)]/l
支
(3)
[0112]
w=[180*(b
1-b0)]/π*r2(5)
[0113]
如图11所示,其中α为一对支架臂的原始夹角,也即在预调节前一对支架臂的夹角;l
支
为初始状态下,也即预调节前,里程轮220的中心沿平行于支架臂270的长度方向延伸至与中轴杆220的中心轴线相交点的长度;r1为被测地下管道的内径;r1为里程轮的半径;r2为调节电机输出轴的半径;l
设
预调节盘;r2为预调节盘280的半径;
[0114]
s30、控制所述调节电机旋转调节角度w以通过预收绳拉动第二支座使得里程轮进行预收缩。优选地,其中预调节控制单元285在判断l
测
小于l
设
的时刻t后t秒时,给调节电机断电,使得弹簧260复位,t=s/v,s为预调节盘280与里程轮在第一方向上的距离,v为测量装置的设定运动速度;
[0115]
本实施例中,预测距激光传感器281的型号为ttl485232,通过在预调节盘280的外周面设置预测距激光传感器281,以在测量装置的前进方向预先检测障碍物700(例如留置在管道内的障碍物体或者焊缝卷边等),在本实施例中,预测距激光传感器281内凹在预调节盘280的外周面内,通过预调节控制单元285对里程轮210进行预收缩,也即通过拉动第二支座240往靠近与调节盘280的方向移动(如从图11中的实线位置往虚线位置移动),且预收缩的距离与障碍物在管道径向方向的高度成比例,可以避免里程轮210突遇障碍被挤压收缩通过时造成的速度突变,进一步保障了测量装置的匀速运动,进而为精准测量提供了保障。
[0116]
实施例4
[0117]
本实施例在实施例1的基础上,其中第一驱动机构520的控制模块为由单片机或arm微处理器为核心的控制电路,其中控制模块具体根据以下步骤工作:
[0118]
s1、接收所述失速检测组件的失速检测信号s
测
;以速检测组件的失速检测单元为红外测距传感器441为例来说明,此时失速检测信号s
测
检测的为定位板410与牵引板420之间的距离;
[0119]
s2、从状态数据库中读取橡胶片的当前状态信号为第k状态信号,1≤k≤n;所述橡胶片的状态信号包括第1状态信号.....第n状态信号;n大于等于2;第1状态至第n状态变化时,所述橡胶片伸出于里程轮的长度越来越长;其中第1状态信号对应橡胶片完全伸入里程轮内的状态,至少一种状态信号对应橡胶片伸出里程轮的状态;所述状态数据库存储有所有状态信号及其对应的失速检测信号s
测
的数据范围;所述状态信号设有当前状态数据标识位;
[0120]
在本实施例中,假定当辅助牵引绳张紧时,定位板与牵引板之间的距离为s
设
=5cm;状态数据库的初始状态如下表1所示:其中状态信号的最后一位为当前状态数据标识未,1表示该状态信号为当前状态信号,0表示该状态信号为非当前状态。其中当s
测
≥5cm时,表示辅助牵引绳完全张紧,因此测量装置没有失速,此时橡胶片完全位于里程轮的通道内,其状态信号为“zhuangtai0011”,n=5。
[0121]
状态信号序号状态信号数据范围1zhuangtai0011s
测
≥5cm2zhuangtai00204.5cm≤s
测
《5cm3zhuangtai00304.2cm≤s
测
《4.5cm4zhuangtai00403.9cm≤s
测
《4.2cm5zhuangtai0050s
测
《3.9cm
[0122]
表1
[0123]
s3、判断所述失速检测信号s
测
等于设定检测信号s
设
,且判断当前状态信号为第m状态信号时,2≤m≤n;启动电机转动θ*(m-1)角度,以将所述橡胶片缩回至里程轮内;其中θ为设定步进角度;
[0124]
当通过调节使得橡胶片伸出使得测量装置的速度保持与牵引装置一致后,失速检测信号s
测
等于设定检测信号s
设
,而此时橡胶片依然伸出于里程轮外,则可根据当前橡胶片的伸出状态启动电机转动,以将其缩回到里程轮的通道内。
[0125]
s4、判断所述失速检测信号s
测
小于设定检测信号s
设
时,从所述状态数据库中读取与所述失速检测信号s
测
所在的数据范围对应的第p状态信号;启动电机转动θ*(p-k)角度,以将所述橡胶片伸长至对应的状态。
[0126]
当失速检测信号s
测
小于设定检测信号s
设
时,例如当前检测的失速检测信号s
测
=4.7cm,则从表1中查询与该失速检测信号s
测
对应的状态信号的序号为p=2,若读取的当前状态信号为“zhuangtai0011”则k=1,此时控制电机转动θ*(2-1)=θ角度;若读取的当前状态信号为“zhuangtai0051”,此时控制电机转动θ*(2-5)=-3θ角度,也即控制电机反转3θ角度。
[0127]
本实施例实现了橡胶片的伸出长度精准地调控,使得其与测量装置的失速状态相吻合,并且在失速状态消失时可以及时地将橡胶片缩回至通道内,使得测量装置的运行状态复原。
[0128]
以上描述仅为本技术的较佳实施例以及对所运用技术原理的说明。本领域技术人员应当理解,本技术中所涉及的发明范围,并不限于上述技术特征的特定组合而成的技术方案,同时也应涵盖在不脱离所述发明构思的情况下,由上述技术特征或其等同特征进行任意组合而形成的其它技术方案。例如上述特征与本技术中公开的(但不限于)具有类似功能的技术特征进行互相替换而形成的技术方案。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。