1.本发明涉及水下航行器作业设备领域,具体而言,涉及一种水下航行器脐带缆自动收放设备。
背景技术:
2.水下航行器在进行水底作业时经常需要使用脐带缆,脐带缆通常为电缆(动力缆或信号缆)、光缆(单模或多模光缆)、液压或化学药剂管(钢管或软管)的组合,其功能包括为水下系统提供电力和液压通道、为油气田开发系统提供化学药剂管线、传递上部模块(水面设备)的控制信号及水下系统的传感器数据等,是水面系统和水下设备之间重要的联系纽带,广泛用于深水油气勘探开发、水下设施清洗维护、水下探测救援等领域,以实现水面系统和水下设备之间的电力、信号、数据传输以及化学药剂、液体输送。
3.然而,现有的水下航行器脐带缆收放设备中大多只包含绕线装置,在收放过程中无法进行张力控制,放缆时需要人工拉拽,否则无法正常放缆,由于其操作困难,经常需要多人配合方能完成,给实际使用造成了诸多不便;另外,现有的水下航行器脐带缆收放设备无法与航行器的航行状态进行自动匹配,使用时需要提前放出一定长度的缆,否则会影响航行器的正常航行,但脐带缆极易发生堆积和相互缠绕,从而给航行器螺旋桨带来巨大的安全隐患。
技术实现要素:
4.(1)发明目的
5.为了克服现有水下航行器脐带缆收放设备操作困难、使用不便、安全性差的缺陷,本发明提出了一种新的水下航行器脐带缆自动收放设备。本设备结构简单、操作方便、使用安全性得到了极大地提高,且本设备仅利用了较少的传感器与驱动设备就实现了脐带缆的自动收放及收放所需的张力控制,有效降低了设备成本。
6.(2)技术方案
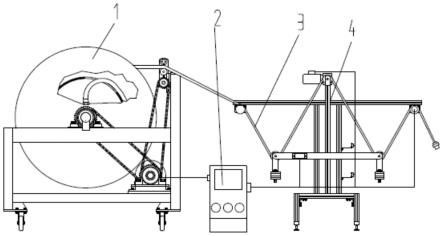
7.根据本发明的一些实施例,本发明水下航行器脐带缆自动收放设备包括绕线装置1、控制系统2、脐带缆3、张力控制装置4;其中:
8.绕线装置1包括机架a11、安装在机架a11上的可转动绕线盘12和驱动绕线盘12转动的电机a15,绕线盘12的转轴19一端安装有电滑环20;
9.控制系统2包括控制器21、变频器a22、变频器b23;控制器21与变频器a22、变频器b23、旋转编码器50、倾斜传感器44、上位光电开关53、下位光电开关54、电滑环20电连接;变频器a22与绕线装置1的电机a15电连接,变频器b23与张力控制装置4的电机b47电连接;
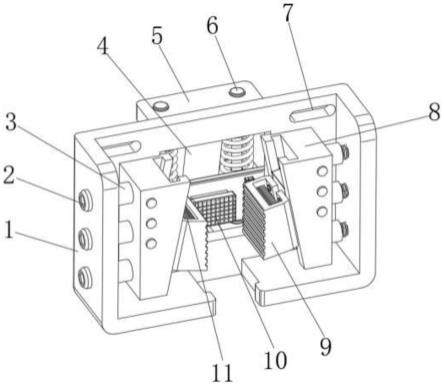
10.张力控制装置4包括机架b41,机架b41的左侧安装有左支撑轮46,机架b41的右侧安装有右支撑轮49,右支撑轮49的轮轴上安装有旋转编码器50,机架b41的中部安装有滚轮48和驱动滚轮48的电机b47,滚轮48上设置有圆弧形凹槽,其圆弧半径与脐带缆3半径相同,机架b41上还安装有两个光电开关,分别为上位光电开关53和下位光电开关54;张力控制装
置4还包括压重机构和倾斜传感器44,压重机构包括横梁42、安装在横梁42左端的动滑轮a45、安装在横梁42右端的动滑轮b51、挂装在动滑轮a45上的重锤a43、挂装在动滑轮b51上的重锤b52,倾斜传感器44安装在横梁42上;
11.脐带缆3绕装在绕线盘12上,脐带缆3的尾端穿过绕线盘12的转轴19与电滑环20相连接,脐带缆3的头端从绕线盘12上引出后依次挂装在所述左支撑轮46、滚轮48、右支撑轮49上,压重机构中横梁42左端的动滑轮a45挂装在左支撑轮46与滚轮48之间的脐带缆3上,横梁42右端的动滑轮b51挂装在右支撑轮49与滚轮48之间的脐带缆3上,从右支撑轮49引出的脐带缆3的头端与水下航行器相连接。
12.进一步地,根据本发明的一些实施例,本发明水下航行器脐带缆自动收放设备中的绕线装置1还包括往复排线装置,往复排线装置包括往复丝杠18和安装在往复丝杠18的螺母上的导轮机构13,往复丝杠18的交叉螺纹轴通过第一链传动机构14与电机a15相连接,脐带缆3支撑在导轮机构13上。
13.进一步地,根据本发明的一些实施例,本发明水下航行器脐带缆自动收放设备中的转轴19与电机a15通过第二链传动机构16相连接。
14.进一步地,根据本发明的一些实施例,本发明水下航行器脐带缆自动收放设备中控制系统2中的控制器21实时采集旋转编码器50传输的信号并计算出水下航行器拖动脐带缆3行进的速度,然后根据该速度控制变频器b23驱动电机b47转动,电机b47驱动滚轮48拖动脐带缆3运动,根据上位光电开关53和下位光电开关54对横梁42的检测信号调整电机b47的转速,使横梁42的高度处于上位光电开关53和下位光电开关54之间,同时控制器21实时采集倾斜传感器44传输的信号,根据该信号控制变频器a22驱动电机a15转动,使横梁42处于水平状态;控制器21通过电缆32与水下航行器实时通信。
15.进一步地,上述水下航行器脐带缆自动收放设备中张力控制装置4中的上位光电开关53用于横梁42的上限位检测,下位光电开关54用于横梁42的下限位检测。
16.进一步地,根据本发明的一些实施例,本发明水下航行器脐带缆自动收放设备中脐带缆3是液压软管31与电缆32的组合,绕线盘12的转轴19另一端安装有液压旋转接头17,脐带缆3的尾端液压软管31与电缆32分开,电缆32穿过绕线盘12的转轴19与电滑环20相连接,液压软管31穿过绕线盘12的转轴19与液压旋转接头17相连接。
17.进一步地,上述水下航行器脐带缆自动收放设备中脐带缆3包括护套61和位于护套61内的液压软管31、电缆32和填充在护套61内的泡沫材料62。
18.进一步地,上述水下航行器脐带缆自动收放设备中电缆32包括供电线和通信线;其中,通信线经电滑环20与控制器21相连接,供电线经电滑环20与电源相连接。
19.此外,本发明还涉及上述水下航行器脐带缆自动收放设备在通过水下航行器实施的水下作业中的用途。
20.(3)有益效果
21.本发明水下航行器脐带缆自动收放设备的优点主要体现在以下几个方面:
22.1、本发明脐带缆自动收放设备可根据水下航行器的航行速度自适应收放脐带缆,有效解决了人工操作不便的问题,同时可减少脐带缆的松垮缠绕对脐带缆收放的不利影响,避免了脐带缆给航行器螺旋桨造成危险。
23.2、本发明水下航行器脐带缆自动收放设备中滚轮两边的脐带缆与横梁构成三角
形,实现了滚轮两侧拉力均衡,避免了滚轮与脐带缆之间打滑以及由此引发的收放失效。
24.3、本发明脐带缆自动收放设备结构简单、控制可靠方便,仅利用了较少的传感器与驱动设备就实现了脐带缆的自动收放及收放所需的张力控制,有效降低了设备成本。
25.4、本发明脐带缆自动收放设备适用面广,可与各类水下航行器配合使用,适应多种应用场景。
附图说明
26.为了更清楚地说明本发明实施例技术方案,下面对实施例描述中需要使用的附图作简要介绍。显而易见地,下面描述中的附图仅是本发明中记载的一些实施例,而不是全部实施例,对于本领域技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
27.图1为根据本发明实施例的脐带缆自动收放设备的整体组成结构图;
28.图2为根据本发明实施例的脐带缆自动收放设备的绕线装置1的组成结构图;
29.图3为图2的左视图;
30.图4为根据本发明实施例的脐带缆自动收放设备的控制系统2的组成结构图;
31.图5为根据本发明实施例的脐带缆自动收放设备的脐带缆3的组成结构图;
32.图6为根据本发明实施例的脐带缆自动收放设备的张力控制装置4的组成结构图;
33.图7为图6的a向视图。
34.附图标记:1:绕线装置、2:控制系统、3:脐带缆、4:张力控制装置、11:机架a、12:绕线盘、13:导轮机构、14:第一链传动机构、15:电机a、16:第二链传动机构、17:液压旋转接头、18:往复丝杠、19:转轴、20:电滑环、21:控制器、22:变频器a、23:变频器b、31:液压软管、32:电缆、41:机架b、42:横梁、43:重锤a、44:倾斜传感器、45:动滑轮a、46:左支撑轮、47:电机b、48:滚轮、49:右支撑轮、50:旋转编码器、51:动滑轮b、52:重锤b、53:上位光电开关、54:下位光电开关、61:护套、62:泡沫材料。
具体实施方式
35.为使本发明的目的、技术方案和优点更加清楚,下面将结合具体实施例对本发明的技术方案进行清楚、完整地描述。显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例,本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。
36.同时,应理解,本发明的保护范围并不局限于下述特定的具体实施方案;还应当理解,本发明实施例中使用的术语是为了描述特定的具体实施方案,而不是为了限制本发明的保护范围。
37.实施例1:本发明为一种水下航行器脐带缆自动收放设备(以下简称为“脐带缆自动收放设备”),下面结合附图1-7对本发明实施例进行详细阐述,对本发明具体实施方式作进一步说明。
38.参照图1,本发明水下航行器脐带缆自动收放设备包括绕线装置1、控制系统2、脐带缆3、张力控制装置4。
39.参照图2、图3,本发明水下航行器脐带缆自动收放设备中的绕线装置1包括机架a11、安装在机架a11上的可转动绕线盘12和驱动绕线盘12转动的电机a15,绕线盘12的转轴19一端安装有电滑环20,另一端安装有液压旋转接头17;绕线装置1还包括往复排线装置,往复排线装置包括往复丝杠18和安装在往复丝杠18的螺母上的导轮机构13,往复丝杠18的交叉螺纹轴通过第一链传动机构14与电机a15相连接,脐带缆3支撑在导轮机构13上;转轴19与电机a15通过第二链传动机构16相连接。
40.参照图4,本发明水下航行器脐带缆自动收放设备中的控制系统2包括控制器21、变频器a22、变频器b23;控制器21与变频器a22、变频器b23、旋转编码器50、倾斜传感器44、上位光电开关53、下位光电开关54、电滑环20电连接;变频器a22与绕线装置1的电机a15电连接,变频器b23与张力控制装置4的电机b47电连接;控制系统2中的控制器21实时采集旋转编码器50传输的信号并计算出水下航行器拖动脐带缆3行进的速度,然后根据该速度控制变频器b23驱动电机b47转动,电机b47驱动滚轮48拖动脐带缆3运动,根据上位光电开关53和下位光电开关54对横梁42的检测信号调整电机b47的转速,使横梁42的高度处于上位光电开关53和下位光电开关54之间,同时控制器21实时采集倾斜传感器44传输的信号,根据该信号控制变频器a22驱动电机a15转动,使横梁42处于水平状态;控制器21通过电缆32与水下航行器实时通信。
41.参照图5,本发明水下航行器脐带缆自动收放设备中的脐带缆3包括护套61和位于护套61内的液压软管31、电缆32和填充在护套61内的泡沫材料62;脐带缆3绕装在绕线盘12上,脐带缆3的尾端液压软管31与电缆32分开,电缆32穿过绕线盘12的转轴19与电滑环20相连接,液压软管31穿过绕线盘12的转轴19与液压旋转接头17相连接,脐带缆3的头端从绕线盘12上引出后依次挂装在所述左支撑轮46、滚轮48、右支撑轮49上,压重机构中横梁42左端的动滑轮a45挂装在左支撑轮46与滚轮48之间的脐带缆3上,横梁42右端的动滑轮b51挂装在右支撑轮49与滚轮48之间的脐带缆3上,从右支撑轮49引出的脐带缆3的头端与水下航行器相连接;另外,电缆32包括供电线和通信线;其中,通信线经电滑环20与控制器21相连接,供电线经电滑环20与电源相连接。
42.参照图6、图7,本发明水下航行器脐带缆自动收放设备中的张力控制装置4包括机架b41,机架b41的左侧安装有左支撑轮46,机架b41的右侧安装有右支撑轮49,右支撑轮49的轮轴上安装有旋转编码器50,机架b41的中部安装有滚轮48和驱动滚轮48的电机b47,滚轮48上设置有圆弧形凹槽,其圆弧半径与脐带缆3半径相同,机架b41上还安装有两个光电开关,分别为上位光电开关53和下位光电开关54;张力控制装置4还包括压重机构和倾斜传感器44,压重机构包括横梁42、安装在横梁42左端的动滑轮a45、安装在横梁42右端的动滑轮b51、挂装在动滑轮a45上的重锤a43、挂装在动滑轮b51上的重锤b52,倾斜传感器44安装在横梁42上;上位光电开关53用于横梁42的上限位检测,下位光电开关54用于横梁42的下限位检测。
43.以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,任何熟悉本专业的技术人员,在不脱离本发明技术方案范围内,当可利用上述揭示的技术内容作出些许更动或修饰获得等同变化的等效实施例,但凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。