1.本发明涉及桥梁建设技术领域,具体为一种桥上构件水面运输和垂直吊装用智能协同定位系统。
背景技术:
2.在河流上修建桥梁时,通常需要在水面上搭设钢平台作为桥上构件的水上运输通道,或者是采用在桥梁0号块附近设置的塔吊进行吊装运输,随着桥梁主跨跨径的增加,尤其是进行特大跨径的桥梁施工时,塔吊需要覆盖的范围更广,吊装能力要求更高,市面上的塔吊不能满足吊装作业半径的要求。另外,当河流有通航需求时,也不能在水面上搭设钢平台作为水上运输通道。在此种施工条件下,桥上构件的运输成为亟需解决的问题。
技术实现要素:
3.针对现有技术存在的问题,本发明提供一种桥上构件水面运输和垂直吊装用智能协同定位系统。
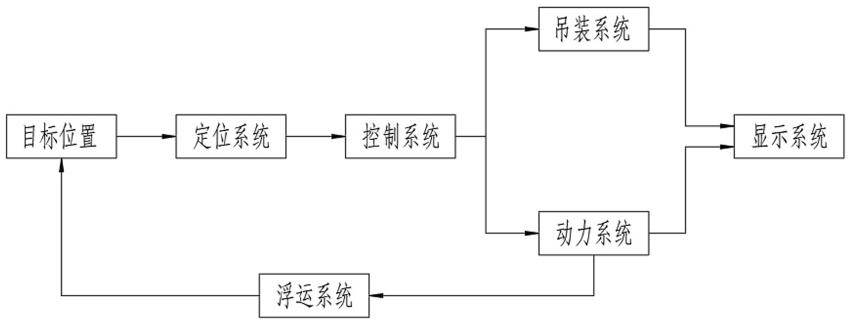
4.本发明提供如下技术方案如下:一种桥上构件水面运输和垂直吊装用智能协同定位系统,所述协同定位系统包括定位系统、控制系统、吊装系统、动力系统、浮运系统和显示系统;所述定位系统包括北斗差分定位系统、北斗定位终端、imu惯性测量单元和北斗地面基准站,北斗定位终端安装在浮运船上,imu惯性测量单元安装在所吊构件的吊点上,获取浮运船和构件的实时位置;控制系统包括pid控制器,通过识别浮运船位置的实际值并与位置期望值进行比较,利用位置的实际值与期望值的偏差来纠正系统的响应,进行位置的调节控制;吊装系统包括安装在桥面上的吊装设备,吊装设备能在平面内转动,通过吊钩将桥面以下的构件竖向提升;浮运系统包括浮运船;动力系统包括设置在运输构件的浮运船上的五个卷扬机和能正反方向驱动的水下推进器;显示系统用于显示吊装设备、卷扬机和浮运船的工作状态;并显示水下推进器的平、立、横面的布置状态和浮运船的实时位置及行驶轨迹;所述pid控制器安装在陆地上的控制室内,分别与北斗差分定位系统、北斗定位终端、imu惯性测量单元、浮运船动力系统相连,对位置进行动态修正,实现构件垂直起吊和吊装安全。
5.需要进一步说明的是,所述浮运船通过对锚碇和水下推进器位置的布置,在航道中实现半幅水面运输构件,半幅水面通航。
6.需要进一步说明的是,所述吊装设备包括吊机和吊车。
7.需要进一步说明的是,所述卷扬机通过转盘固定在浮运船上,卷扬机通过转盘实
现方位角的转动,并在每半跨河流中设置5个锚碇,锚碇与浮运船上的卷扬机通过牵引绳进行连接,浮运船上另安装1台能正反方向驱动的水下推进器,通过卷扬机收放牵引绳和水下推进器驱动实现浮运船位置的移动、定位和方向的调整。
8.水下推进器的设置是为了避免顺桥向牵引绳连接至另半跨,保证施工期间半跨可通航。另半跨同理对称设置另一套桥上构件水面运输和垂直吊装用智能协同定位系统。一侧半跨桥上构件运输安装作业时,另一侧的桥上构件水面运输和垂直吊装用智能协同定位系统不工作,浮运船停靠于起运码头,牵引绳通过卷扬机松放于河床上。
9.需要进一步说明的是,所述的imu惯性测量单元安装在所吊构件的吊点上,用于监测提升过程起吊绳的竖直度和构件的提升高度。
10.需要进一步说明的是,所述协同定位系统的控制方法包括以下步骤:
①
在河岸边的吊装码头或平台上,利用吊车将构件按设定方位吊放到浮运船上。构件通过水面运输和垂直吊装用智能协同定位系统自动运输至设定位置,随后自动调整至设定方向,再通过浮运船控制系统和吊装设备的智能化协同将构件竖直提升。
11.②
浮运船上安装有一个适当功率的水下推进器和五个卷扬机,卷扬机上安装有牵引绳,另一端通过锚碇固定在河床中,水下推进器和五个卷扬机作为浮运船的动力装置来运输构件,北斗定位终端安装在浮运船上,获取浮运船的实时位置;
③
浮运船顺桥向行驶时,行驶方向上的水下推进器与钢丝绳协同工作,避免返回时浮运船因速度过快与河岸发生撞击;
④
构件在水面运输就位后,为了保证构件在浮运船上由水平吊至竖直状态过程中的安全性,防止构件摆动过大,构件与浮运船间采用一根软绳进行连接。在构件吊离浮运船时,软绳上的自动脱钩装置工作,解除构件与浮运船的连接;
⑤
当浮运船在河岸边吊装构件时,固定在河床中的5个锚碇的位置依次为m1~m5,此时卷扬机牵引绳的长度分别为:l1~l5,取浮运船上已知的两点设为a点和b点,坐标分别为:(xa,ya)、(xb,yb),将a、b两点的坐标位置输入pid控制器中,定位倒运构件时浮运船的位置;
⑥
当浮运船在河面上运输构件时,此时步骤
⑤
中浮运船上已知两点的坐标分别为:a'(x
a'
,y
a'
)、b'(x
b'
,y
b'
),将a'、b'两点的坐标输入到pid控制器中,通过pid控制器控制卷扬机工作,给浮运船提供动力,此时卷扬机牵引绳的长度分别为:l
1'
~l
5'
。
12.⑦
当吊装系统吊装构件时,此时步骤
⑤
中浮运船上已知两点的坐标分别为:a〞(x
a〞
,y
a〞
)、b〞(x
b〞
,y
b〞
),将a〞、b〞两点的坐标输入到pid控制器中,确定构件最终的吊装位置;此时,所吊构件的吊点上安装的imu惯性测量单元监测吊钩的竖直度和吊装速度,当构件还未吊离浮运船吊钩发生倾斜时,pid控制器控制卷扬机不断对浮运船的位置进行修正,确保吊钩提升构件时一直处于垂直状态。
13.北斗差分定位系统是在北斗卫星导航系统(bds)的基础上,利用差分技术,将得到的单点定位的结果与基准站坐标比较,求解出实时差分修正值,以广播或数据链传输方式,将差分修正值传送至定位系统,以修正其定位,提高其局部范围内用户的定位精度。
14.北斗差分定位系统定位精度达到1米以内,其性能指标已领先全球定位系统。北斗差分定位系统可广泛应用于海洋测绘、港口航道测量、航道疏浚、船舶进出港及狭窄水道导航定位、海上交通安全管理、海上石油勘探、海洋资源调查、海上救助捕捞、海
洋渔业及其他海上领域。
15.北斗地面基准站是数据接收、存储和提供服务的场所,存放着系统服务器和核心网络设备;是永久性测量标志点,是获取观测数据的地面接收端口;包括测量标示、测量标志、观测墩、仪器设备、电力和通信等设施。
16.与现有技术相比,本发明的有益效果如下:1、本发明可以实现构件的自动化、智能化水面运输,不受通航的影响,能使运输构件精准定位,并对位置进行修正,确保构件的垂直起吊,确保吊装过程的安全;2、本发明通过pid控制器控制卷扬机不断对浮运船的位置进行修正,确保吊钩提升构件时一直处于垂直状态;3、本发明采用北斗差分定位系统还能兼容gps信号,这就意味着安装北斗定位终端的浮运船既可以单独使用北斗导航,也可以使用“北斗”和gps“双模”导航,定位精度达到1米以内,其性能指标已领先全球定位系统。
附图说明
17.图1为本发明的原理图;图2为本发明的结构示意图;图3为本发明浮运船的结构示意图;图4为本发明实施例中浮运船在河岸边倒运构件的平面图;图5为本发明实施例中浮运船在河面上运输构件的平面图;图6为本发明实施例中吊装系统吊装构件时浮运船的平面位置示意图;图中:1、浮运船;2、吊机;3、吊车;4、构件;5、桥面;6、钢平台; 11、锚碇;12、牵引绳;13、卷扬机;14、水下推进器;15、北斗定位终端。
具体实施方式
18.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
19.如图1所示,一种桥上构件水面运输和垂直吊装用智能协同定位系统,所述协同定位系统包括定位系统、控制系统、吊装系统、动力系统、浮运系统和显示系统;所述定位系统包括北斗差分定位系统、北斗定位终端、imu惯性测量单元和北斗地面基准站,北斗定位终端安装在浮运船上,imu惯性测量单元安装在所吊构件的吊点上,获取浮运船和构件的实时位置;控制系统包括pid控制器,通过识别浮运船位置的实际值并与位置期望值进行比较,利用位置的实际值与期望值的偏差来纠正系统的响应,进行位置的调节控制;吊装系统包括安装在桥面上的吊装设备,吊装设备能在平面内转动,通过吊钩将桥面以下的构件竖向提升;imu惯性测量单元采用bw-imu400c,bw-imu400c是一款高精度的捷联式惯性测量单元,可以测量运动载体的角速度、加速度参数。原始数据通过具有适当增益的6态卡尔曼
滤波得到相应估计,适用于运动或振动状态下的惯性测量。采用高可靠性的mems加速度计和陀螺仪,并通过算法保证测量精度,同时密封设计以及严格的生产工艺保证产品在恶劣的环境下仍能精密地测量载体的角速度和加速度等运动参数。通过非线性补偿、正交补偿、温度补偿和漂移补偿等多种补偿,可以大大消除bw-imu400c的误差源,提高产品精度水平;imu惯性测量单元安装在所吊构件的吊点上,用于监测提升过程起吊绳的竖直度和构件的提升高度。
20.浮运系统包括浮运船;动力系统包括设置在运输构件的浮运船上的五个卷扬机和可正反方向驱动的水下推进器;水下推进器采用t2020推进器;额定功率:6.5kw ;常规电压:300v ;向前推力:120kg ;向后推力:60kg ;其外壳采用钛合金材料,有效的提高了外壳强度和耐腐蚀性能,减少了用户的维护时间,提高了可靠性,特别适合应用于长时间在水中工作的应用。
21.显示系统用于显示桥面吊装设备、各锚碇、各卷扬机、各牵引绳、浮运船和水下推进器的平、立、横面的布置状态和浮运船的实时位置和行驶轨迹。
22.所述浮运船通过对锚碇和水下推进器位置的布置,在航道中实现半幅水面运输构件,半幅水面通航。
23.所述吊装设备包括吊机和吊车。
24.所述卷扬机通过转盘固定在浮运船上,卷扬机通过转盘实现方位角的转动,并在每半跨河流中设置5个锚碇,锚碇与浮运船上的卷扬机通过牵引绳进行连接,浮运船上另安装1台能正反方向驱动的水下推进器,通过卷扬机收放牵引绳和水下推进器驱动实现浮运船位置的移动、定位和方向的调整。
25.水下推进器的设置是为了避免顺桥向牵引绳连接至另半跨,保证施工期间半跨可通航。另半跨同理对称设置另一套桥上构件水面运输和垂直吊装用智能协同定位系统。一侧半跨桥上构件运输安装作业时,另一侧的桥上构件水面运输和垂直吊装用智能协同定位系统不工作,浮运船停靠于起运码头,牵引绳通过卷扬机松放于河床上。
26.所述协同定位系统的控制方法包括以下步骤:
①
如图2所示,在河岸边的钢平台6上,利用吊车3将构件4按设定方位吊放到浮运船1上,当浮运船1将构件4运输到指定位置时,通过浮运船1控制系统和吊机2的智能化协同将构件4竖直提升。
27.②
如图3所示,所述的浮运船1上安装有一个可正反方向驱动的水下推进器14和五个卷扬机13,卷扬机上安装有牵引绳12,另一端通过锚碇11固定在河床中,水下推进器14和五个卷扬机13作为浮运船的动力装置来运输构件4,北斗定位终端15安装在浮运船上,获取浮运船的实时位置。
28.③
如图4所示,此时为浮运船在河岸边倒运构件的平面图,m1~m5为固定在河床中的5个锚碇,此时卷扬机牵引绳的长度分别为:l1~l5,a点和b边为浮运船上已知的两点,坐标分别为:(xa,ya)、(xb,yb),a、b两点的坐标位置输入pid控制器中,用来定位在钢平台装构件时浮运船的位置。
29.④
如图5所示,此时为浮运船在河面上运输构件的平面图,此时浮运船上已知两点的坐标分别为:a'(x
a'
,y
a'
)、b'(x
b'
,y
b'
),a'、b'两点的坐标也事先输入到pid控制器中,通过
控制器控制卷扬机工作,给浮运船提供动力,此时卷扬机牵引绳的长度分别为:l
1'
~l
5'
。
30.⑤
如图6所示,此时为吊装系统吊装构件时浮运船的平面位置,此时浮运船上已知两点的坐标分别为:a〞(x
a〞
,y
a〞
)、b〞(x
b〞
,y
b〞
),a〞、b〞两点的坐标也事先输入到pid控制器中,用来确定构件最终的吊装位置。此时,所吊构件的吊点上安装的imu惯性测量单元监测构件提升过程起吊绳的竖直度和构件的提升高度,当构件还未吊离浮运船吊钩发生倾斜时,pid控制器控制卷扬机不断对浮运船的位置进行修正,确保吊钩提升构件时一直处于垂直状态。
31.需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
32.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
