一体化的ai精准节水灌溉机器人
技术领域
1.本实用型涉及智能化灌溉测技术领域,特别是一体化的ai精准节水灌溉机器人。
背景技术:
2.我国是水资源紧缺国,多年人均水资源仅为世界人均占有量的28%,仅世界人均占有量的1/4,同时我国是农业大国,农业用水量比重大,农业灌溉用水占总用水量的61.3%。而水稻灌溉用水约占农业灌用水量的70%,水稻的灌溉主要采用大水漫灌形式,常规灌溉对水资源的浪费巨大。随着人口增长、城镇和工业的发展,全球气候变化等因素,用于作物灌溉的水资源愈来愈匮乏,严重威胁作物特别是水稻生产的发展。如何在增加水稻产量的同时减少宝贵水资源的使用,这是农业面临的一个巨大挑战。另外稻田是我国农业面源污染的重要来源,在稻田耕作中,为保证作物需水量,用于田间灌溉的水量较大,易增加地表径流,引起面源污染。如何在节水的同时减少氮磷污染,这是农业面临的另一个巨大挑战。国内外研究结果表明,水稻具有一定的水旱两栖性,有很大的节水潜力。现有的灌溉技术和稻田灌溉设备存在水资源利用率不高、氮肥利用率不高、自动化程度低,人力成本高、缺乏精准的墒情诊断和灌水指标、缺乏精准水量与产量的耦合指标、缺乏有效减少面源氮磷污染等六大问题与痛点。
3.因此,现设计一种一体化的ai精准节水灌溉机器人,耦合ai技术、水稻灌溉技术、机械电子技术及土壤学相关知识,充分利用各学科优势,实现智能灌溉,有效解决上述痛点。
技术实现要素:
4.本实用新型的目的在于克服现有技术的缺点,提供一种一体化的ai精准节水灌溉机器人,能耦合ai技术、水稻灌溉技术、土壤学相关知识等相关技术,对灌溉区土壤指标、气象指标、作物指标等多种指标进行检测,并能根据监测指标进行智能决策,实现智能灌溉。
5.本实用新型的目的通过以下技术方案来实现:
6.一体化的ai精准节水灌溉机器人:
7.包括行走机构和设置于行走机构上的机器人本体;
8.所述机器人本体上配置有中央控制系统,信息采集模块,以及用于检测作物生长情况的检测模块;
9.所述信息采集模块、检测模块分别与中央控制系统电性连接;
10.所述中央控制系统与排水模块、灌溉模块、移动终端分别无线连接。
11.进一步地,所述的检测模块包括检测仪,检测仪通过机械臂夹持在机器人本体上。
12.进一步地,所述的机械臂包括依次连接的后臂、中臂、前臂、机械手,机器人本体躯干为圆柱形壳体、圆柱形壳体内部形成内腔,后臂通过升降柱设置在升降气缸升缩端的顶部,升降气缸设置在内腔底部,机器人本体躯干左右两侧均开设有可供机械臂伸出的侧开口;
13.所述升降柱与后臂之间,后臂与中臂之间,中臂与前臂之间分别通过一舵机连接。
14.进一步地,所述的升降气缸外部还安装有气缸套筒,升降柱与气缸套筒相互配合。
15.进一步地,所述的行走机构包括两个前轮轮,两个后轮;
16.所述两个前轮设置在底盘底部前侧并分别连接有直行电机,两个后轮分别安装在底盘底部后侧并分别连接有转向电机。
17.进一步地,所述的灌溉模块包括自动阀门;
18.所述自动阀门设置在主道渠与每级稻田之间,主道渠设置在稻田右侧,每级稻田均设有一水池,水池内设置有水位传感器;
19.所述水位传感器、自动阀门均与中央控制系统无线连接。
20.进一步地,所述的排水模块包括排水阀门,排水阀门设置在排水沟与每级稻田之间,排水沟设置在稻田左侧,排水阀门与中央控制系统无线连接。
21.本实用新型具有以下优点:(1)采用具有ai神经网络的机器人,结合排水模块、灌溉模块,以及信息采集模块等,实现ai技术、水稻灌溉技术、土壤学相关知识等技术耦合,进而使机器人对灌溉区土壤指标、气象指标、作物指标等多种指标进行检测,并根据监测指标进行智能决策,实现智能灌溉的目的;
22.(2)通过互联网可远程利用移动终端实时监控水位传感器所检测的水位,和自动阀门或排水阀门的流量,实时掌控阀门开关状态以及施肥参数等灌溉系统的综合运行情况,实现灌溉、施肥全智能化管理。
附图说明
23.图1为本实用新型ai精准节水灌溉机器人示意图;
24.图2为本实用新型系统示意图;
25.图3为本实用新型ai精准节水灌溉机器人去前侧壳体后的示意图;
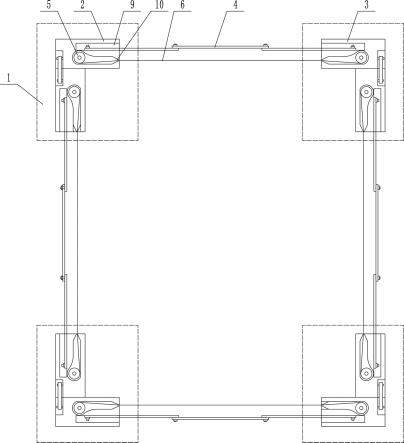
26.图4为本实用新型的排水沟、主渠道示意图;
27.图中:1-中央控制系统,2-信息采集模块,3-排水模块,4-灌溉模块,7-视觉模块,9-检测模块,10-移动终端,11-人机交互模块,201-气象信息采集模块,202-水位信息采集模块,203-土壤信息采集模块,401-自动阀门,402-水池,403-主渠道,301-排水沟,302-排水阀门,601-摄像机,603-测开口,604-电池模块,605-底盘,1001-升降气缸,1002-升降柱,1003-气缸套筒,1004-后臂,1005-舵机,1006-中臂,1007-前臂,1101-显示屏。
具体实施方式
28.下面结合附图对本实用新型做进一步的描述,但本实用新型的保护范围不局限于以下所述。
29.如图1至图4所示,一体化的ai精准节水灌溉机器人,包括行走机构和设置于行走机构上的机器人本体,该机器人本体上配置有中央控制系统1,信息采集模块2,以及用于检测作物生长情况的检测模块9;信息采集模块2、检测模块9分别与中央控制系统1电性连接;同时,中央控制系统1与排水模块3、灌溉模块4、移动终端10还分别无线连接;其中排水模块3包括设置在稻田内的多个排水阀门302,灌溉模块4包括设置在稻田内的多个自动阀门401。
30.同时,检测模块9包括检测仪901,检测仪901通过机械臂设置于机器人本体躯干上用于检测作物生长情况,信息采集模块2包括气象信息采集模块201、水位信息采集模块202、土壤信息采集模块203,其中,气象信息采集模块201主要作用为记录植物的生长环境状态,具体的可选用shq-2型综合数字气象仪,安装于稻田监测区的空地处,用于采集空气温度、空气湿度、风速、风向、气压和雨量等信息,并将信息传输给中央控制系统1;水位信息采集模块202,可选用水位监测仪进行监测,安装于各个稻田监测稻田内及田间的沟渠中,用于采集田面水深度、沟渠水位、地下水位等信息,并将信息传输给中央控制系统1;土壤墒情采集模块203,可选用土壤温湿度传感器进行信息采集,安装于用于各个稻田监测区间内,用于采集土壤温度、土壤湿度等信息,并将信息传输给中央控制系统1。从而,中央控制系统1结合排水模块3、灌溉模块4、检测模块9以及信息采集模块2等形成整体系统,可通过使用现代信息采集及传输技术,对灌区内的土壤指标、气象指标、作物指标等多种指标进行监测,并根据监测指标,进行灌溉智能决策或辅助决策,对灌溉过程进行控制,以保证灌溉的适时、适量。
31.本方案中,检测仪901为植物冠层分析仪,可检测叶面积指数,冠层氮素含量等多种植物生长指标,中央控制系统1控制检测仪901进行植物冠层检测,然后检测仪901将检测的植物生长信息传回给中央控制系统1。
32.本方案中,中央控制系统1含有ai神经网络,信息采集模块2采集的数据和检测模块9所得数据可输入中央控制系统1内的ai神经网络,从而ai神经网络可无限采集稻田数据,构成强大的数据支撑和实时诊断报告,并在不同时期,依据诊断报告来调节控制阀门实现智能灌溉;例如,需要灌溉时,ai神经网络分析输入的信号后得出诊断报告再输出信号,该信号将信息传递给中央控制系统1的控制模块,控制模块依据诊断报告发送控制信号给进水或排水阀门,缺水时,打开或调节进水阀门来实现智能灌溉;而雨水量过多时,控制模块则依据诊断报告打开排水阀进行排水。
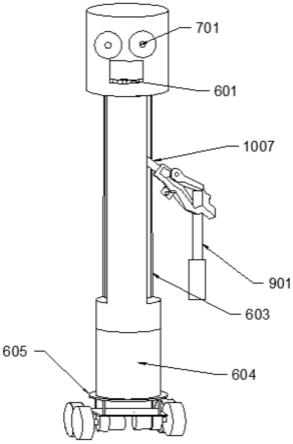
33.本方案中,机器人本体头部还设有视觉模块7,视觉模块7与中央控制系统1电性连接,视觉模块7包括设置在机器人本体头部的两个摄像机601,摄像机601采集现场图像信息并将现场图像信息传递给中央控制系统1,中央控制系统1将图像信息远程传送给移动终端10,从而能便于移动终端10远程观察图像信息。
34.同时,除利用移动终端查看作物生长以及控制信号发送外,还可以通过机器人头部的人机交互模块11进行控制信号的输入,人机交互模块11包括显示屏1101和输入按键,从而可在现场使用ai精准节水灌溉机器人开启植物生长状态的检测或直接进行智能灌溉。
35.本方案中,灌溉的稻田为多级稻田,稻田右侧设有主渠道403、左侧设有排水沟301,每级稻田左侧均设有一排水出口与排水沟301连通,排水出口处设有排水阀门302,中央控制系统1远程控制排水阀门302的开关,以及排水出口的流量大小;每级稻田右侧还设有一个水池402,水位传感器设置在水池402内用于测量稻田内的水位信息,并将水位信息传递给中央控制系统1;主道渠403与每级稻田之间还设有一个自动阀门401,当水位信息低于所需值时,中央控制系统1控制自动阀门401打开,进行灌溉,当水位传感器感应到水位上升至设定高度时,自动阀门401立即关闭。
36.本方案中,水位传感器、主渠道403和自动阀门401形成一个灌溉系统,水位传感器、排水沟301、排水阀门302形成的排水系统;按照作物的生长要求和稻田水分状况对稻田
排水水位实行有效管理,结合排水系统,控制降雨期间和雨后格田向排水沟排水的时间,推迟降雨期间格田的排水时间,增加田面水深,便可减轻由于雨滴击溅引起的水流絮动。
37.本方案中,行走机构包括两个前轮轮,两个后轮,两个前轮设置在底盘605底部前侧并分别连接有直行电机,两个后轮分别安装在底盘605底部后侧并分别连接有转向电机,直行电机可驱动机器人本体前后移动,转向电机驱动机器人本体进行转向,直行电机、转向电机分别与中央控制系统电性连接。
38.本方案中,机器人本体躯干为圆柱形壳体,圆柱形壳体内部形成内腔,检测模块9设置于机器人本体躯干上用于检测作物生长情况,检测模块9包括检测仪901和机械臂;机械臂包括依次连接的后臂1004、中臂1006、前臂1007、机械手,检测仪901被夹持在机械手处,后臂1004安装在升降气缸1001顶端的升降柱1002上,升降气缸1001安装在机器人本体的内腔底部,机器人本体的圆柱形壳体左右侧各开设有侧开口603,机械臂可从侧开口603伸出圆柱形壳体活动,同时,升降柱1002与后臂之间,后臂1004与中臂1006之间,中臂1006与前臂1007之间分别通过一舵机1005连接,其中,后臂1004与升降柱1002之间的舵机1005可驱动后臂1004沿升降柱1002轴向转动,后臂1004与中臂1006之间,和中臂1006与前臂1007之间的舵机1005可驱动中臂1006、前臂1007进行弯曲,再结合升降气缸1001的升降功能,便可用于检测仪901测量不同高度作物,以及不同生长角度作物的生长信息。
39.为了提高升降气缸1001和机械臂间的稳定性,升降气缸1001外部还安装有气缸套筒1003,升降柱1002与气缸套筒1003相互配合滑动。
40.本方案中,底盘605上方机器人本体躯干下方还设有电池模块604,电池模块604为机器人整体提供电能。
41.本方案中,中央控制系统1还包括储存模块,移动终端10可将施肥参数等信息录入储存模块储存,同时,中央控制系统1也可自动将灌溉次数录入储存模块中储存。
42.本方案中,机器人本体还配置有测距模块,测距模块包括设置在机器人本体躯干上的激光雷达图中未画出,激光雷达设定角度发射多束探测激光束,并根据探测激光束的反射信号确定障碍物,以及障碍物的特征信息,激光雷达采用rplidara1,通过激光雷达与中央控制系统1的ai神经网络也可形成强大的雷达数据,确定机器人的位置,与周边环境,再通过ai神经网络判断当时环境,形成ai导航算法,算法能准确规划路线,达到自动巡田、定点采集、自动避障、自动返航等复合型功能的目的。
43.本方案中,机器人对灌区内多种指标进行监测与通控,还可通过在沟渠设置水位检测装置,实时录入降雨信息等措施,耦合田间水位、沟渠水位、土壤湿度及降雨信息,实现田间水位调节,以及推迟降雨期间格田的排水时间,达到面源氮磷污染流失最小化,实现稻田面源污染输出的控制,实现远程掌控阀门及参数,可实现节水65%、增产58%,提品15%,总磷、总氮降低80.7%、65.6%四大功能耦合,实现水稻农业生产节水、优质、高效、生态、安全等可持续发展的目标。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。