1.本实用新型属于分拣系统技术领域,具体为悬挂式机器人系统和分拣系统。
背景技术:
2.机器人是一种能够半自主或全自主工作的智能机器。机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围。
3.目前在快递分拣的过程中,都为人工扫码对快递进行分拣处理,使得耗费大量的劳动力,为了解决以上问题,提出了一种悬挂式机器人系统和分拣系统。
技术实现要素:
4.本实用新型的目的在于:为了解决上述提出的问题,提供悬挂式机器人系统和分拣系统。
5.本实用新型采用的技术方案如下:悬挂式机器人系统,包括四侧通过固定螺丝安装在上墙板下端的固定板,所述固定板的下端前后相对一侧安装有定位支架,所述定位支架的下端的定位块相对一侧设置有电动滑轨,所述电动滑轨上滑动安装有滑块,所述滑块的下端连接有第二电动滑轨,所述第二电动滑轨的下端滑动安装有第二滑块,所述第二滑块的下端连接有电动伸缩杆,所述电动伸缩杆的下端连接有安装板,所述安装板的下端连接有扫码器,所述输送机架的后端设置有多个收集箱。
6.在一优选的实施方式中,位于前端所述收集箱的相对一端在输送机架上设置有推板,所述推板的后侧固定连接有电动推杆。
7.在一优选的实施方式中,所述电动推杆的一端通过安装支架安装在输送机架上,所述收集箱的一侧上端在输送机架上设置有导向板,所述输送机架的一侧开设有第一导向槽。
8.在一优选的实施方式中,所述导向板向下倾斜的角度为45~50
°
,所述定位块的下端左右两侧安装有第二定位支架,所述第二定位支架的内侧开设有第二导向槽。
9.在一优选的实施方式中,所述第二电动滑轨的前后两端设置有导向块,所述导向块的前后端滑动安装在第二定位支架内的第二导向槽内。
10.一种分拣系统,包括输送机架,所述输送机架的两侧活动安装有传输辊,所述传输辊上设置有输送带,所述传输辊的一侧连接有驱动电机,所述输送带的上方安装有所述的悬挂式机器人系统。
11.综上所述,由于采用了上述技术方案,本实用新型的有益效果是:
12.1、本实用新型中,工件到达悬挂式机器人的正下方后,电动伸缩杆带动安装板下降,便可带动扫码器下降,扫码器能够前后左右移动,对工件条形码进行扫描,扫描之后通过控制台判断属于工件属于哪一部分,通过相对应的电动推杆带动推板运动,便可将工件推入到与之相对应的收集箱内,完成分拣工作,能够实现自动化扫描和自动化分拣操作,节
约了人力提高了装置的实用性。
附图说明
13.图1为本实用新型的整体的俯视的结构示意图;
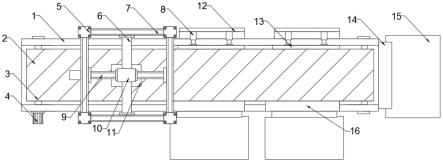
14.图2为本实用新型的整体的悬挂式机器人部分的正视结构示意简图。
15.图中标记:1-输送机架、2-输送带、3-传输辊、4-驱动电机、5-固定板、6-第二电动滑轨、7-第二定位支架、8-电动推杆、9-电动滑轨、 10-滑块、11-安装板、12-安装支架、13-推板、14-导向板、15-收集箱、 16-第一导向槽、17-上墙板、18-定位支架、19-扫码器、20-电动伸缩杆、21-第二滑块。
具体实施方式
16.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
17.参照图1-2,悬挂式机器人系统,上墙板17的下端四侧通过固定螺丝安装有固定板5,固定板5的下端前后相对一侧安装有定位支架 18,定位支架18的下端的定位块相对一侧设置有电动滑轨9,电动滑轨9上滑动安装有滑块10,滑块10的下端连接有第二电动滑轨6,第二电动滑轨6的下端滑动安装有第二滑块21,第二滑块21的下端连接有电动伸缩杆20,电动伸缩杆20的下端连接有安装板11,安装板11的下端连接有扫码器19,电动伸缩杆20带动安装板11下降,便可带动扫码器19下降,通过第二滑块21和第二电动滑轨6以及滑块10和电动滑轨9的配合,使得扫码器19能够前后左右移动,能够提高对工件条形码的扫描效果,输送机架1的后端设置有多个收集箱 15,通过收集箱15完成对工件分拣后的储存。
18.需要说明的是,位于前端收集箱15的相对一端在输送机架1上设置有推板13,推板13的后侧固定连接有电动推杆8,扫描之后通过控制台判断属于工件属于哪一部分,然后在向后传输的过程中,通过相对应的电动推杆8带动推板13运动,便可将工件推入到与之相对应的收集箱15内,完成分拣操作。
19.需要说明的是,电动推杆8的一端通过安装支架12安装在输送机架1上,收集箱15的一侧上端在输送机架1上设置有导向板14,输送机架1的一侧开设有第一导向槽16。
20.需要说明的是,导向板14向下倾斜的角度为45~50
°
,定位块的下端左右两侧安装有第二定位支架7,第二定位支架7的内侧开设有第二导向槽,通过导向板14能够对推入的工件起到导流作用,防止工件受重力的作用而损坏,提高了工件的储存效果。
21.需要说明的是,第二电动滑轨6的前后两端设置有导向块,导向块的前后端滑动安装在第二定位支架7内的第二导向槽内,电动推杆 8和扫码器19与外接的plc端连接,通过plc端能够控制装置整体的工作,实现了自动化操作。
22.一种分拣系统,包括输送机架1,输送机架1的两侧活动安装有传输辊3,传输辊3上设置有输送带2,传输辊3的一侧连接有驱动电机4,输送带2的上方安装有悬挂式机器人系统。
23.工作原理:本装置在使用时,首先整体外接电源,然后将工件放入到输送带2上,在放入的过程中,首先通过上阶段将工件的条码正对上方,在向后传输的过程中,到达悬挂式
机器人的正下方后,电动伸缩杆20带动安装板11下降,便可带动扫码器19下降,通过第二滑块21和第二电动滑轨6以及滑块10和电动滑轨9的配合,使得扫码器19能够前后左右移动,能够提高对工件条形码的扫描效果,扫描之后通过控制台判断属于工件属于哪一部分,然后在向后传输的过程中,通过相对应的电动推杆8带动推板13运动,便可将工件推入到与之相对应的收集箱15内,完成一次工件的分拣工作,以后重复以上步骤即可。
24.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.悬挂式机器人系统,其特征在于:包括四侧通过固定螺丝安装在上墙板(17)下端的固定板(5),所述固定板(5)的下端前后相对一侧安装有定位支架(18),所述定位支架(18)的下端的定位块相对一侧设置有电动滑轨(9),所述电动滑轨(9)上滑动安装有滑块(10),所述滑块(10)的下端连接有第二电动滑轨(6),所述第二电动滑轨(6)的下端滑动安装有第二滑块(21),所述第二滑块(21)的下端连接有电动伸缩杆(20),所述电动伸缩杆(20)的下端连接有安装板(11),所述安装板(11)的下端连接有扫码器(19),输送机架(1)的后端设置有多个收集箱(15)。2.如权利要求1所述的悬挂式机器人系统,其特征在于:位于前端所述收集箱(15)的相对一端在输送机架(1)上设置有推板(13),所述推板(13)的后侧固定连接有电动推杆(8)。3.如权利要求2所述的悬挂式机器人系统,其特征在于:所述电动推杆(8)的一端通过安装支架(12)安装在输送机架(1)上,所述收集箱(15)的一侧上端在输送机架(1)上设置有导向板(14),所述输送机架(1)的一侧开设有第一导向槽(16)。4.如权利要求3所述的悬挂式机器人系统,其特征在于:所述导向板(14)向下倾斜的角度为45~50
°
,所述定位块的下端左右两侧安装有第二定位支架(7),所述第二定位支架(7)的内侧开设有第二导向槽。5.如权利要求4所述的悬挂式机器人系统,其特征在于:所述第二电动滑轨(6)的前后两端设置有导向块,所述导向块的前后端滑动安装在第二定位支架(7)内的第二导向槽内。6.一种分拣系统,包括输送机架(1),所述输送机架(1)的两侧活动安装有传输辊(3),所述传输辊(3)上设置有输送带(2),所述传输辊(3)的一侧连接有驱动电机(4),其特征在于,所述输送带(2)的上方安装有如权利要求1-5任一项所述的悬挂式机器人系统。
技术总结
本实用新型公开了悬挂式机器人系统和分拣系统,包括输送机架,所述输送机架的两侧活动安装有传输辊,所述传输辊上设置有输送带,所述输送带的上部在上墙板的下端四侧通过固定螺丝安装有固定板,所述固定板的下端前后相对一侧安装有定位支架,所述定位支架的下端的定位块相对一侧设置有电动滑轨,所述电动滑轨上滑动安装有滑块,所述滑块的下端连接有第二电动滑轨,所述第二电动滑轨的下端滑动安装有第二滑块,所述第二滑块的下端连接有电动伸缩杆,所述电动伸缩杆的下端连接有安装板,所述安装板的下端连接有扫码器,所述输送机架的后端设置有多个收集箱,本装置能够实现自动扫描自动分拣操作,能够大大提高了整体的实用效果。果。果。
技术研发人员:于水滢
受保护的技术使用者:郑州严格智能科技有限公司
技术研发日:2021.12.24
技术公布日:2022/7/19
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。