1.本发明属于铸造设备技术领域,涉及多指多功能铸造机械手。
背景技术:
2.近些年来,我国已成为铸件生产大国,铸件产量大幅增长。特别是大型、超大型铸件产量与日聚增。中、大型的砂型从50-60t至200-300t,仅靠人工使用天车起模、翻转完成多工序操作都存在不确定的稳定性及安全性。至目前尚未有一机多功能的理想器俱,开发适用的机械装备已成为众多铸造企业和铸造工作者关注的焦点。
技术实现要素:
3.本发明的目的在于提供一种多指多功能铸造机械手,填补上述缺憾,从而为铸造业提供一种便捷的适用性强的多工序操作设备。使用便捷、稳定、安全、高效。
4.按照本发明提供的技术方案:一种多指多功能铸造机械手,包括肩梁,所述肩梁上滑动安装夹持臂,所述夹持臂上设有夹持翻转机构,所述夹持翻转机构一侧设有同步顶升起模结构。
5.作为本发明的进一步改进,所述肩梁上部为吊耳,所述肩梁两侧设有横臂,所述横臂两侧设有导轨。
6.作为本发明的进一步改进,所述夹持臂包括夹臂体,所述夹臂体上部安装导向件,所述导向件位于所述导轨中。
7.作为本发明的进一步改进,所述夹持翻转机构包括夹持翻转臂,所述夹持翻转臂由夹持翻转臂驱动机构驱动;所述夹持翻转臂包括翻转主轴一端转动安装于所述夹持臂下部,所述翻转主轴另一端安装翻转肘,所述翻转肘上安装指型爪,所述指型爪设有夹持斜面。
8.作为本发明的进一步改进,所述夹持翻转臂驱动机构包括夹持翻转臂旋转驱动装置,所述翻转臂旋转驱动装置安装在所述夹持臂下部,所述翻转臂旋转驱动装置输出端通过传动结构连接所述翻转主轴。
9.作为本发明的进一步改进,所述传动结构包括主动齿轮和从动齿轮,所述主动齿轮安装在所述翻转臂旋转驱动装置输出端,所述从动齿轮安装在所述翻转主轴中部。
10.作为本发明的进一步改进,所述夹持臂上设置夹持臂锁定机构,所述夹持臂锁定机构包括锁定油缸,所述锁定油缸水平安装于所述夹持臂下部,所述锁定油缸输出轴安装方型斜面锁销,所述翻转肘同侧开有锁定孔,所述锁定孔中安装定位斜块。
11.作为本发明的进一步改进,所述同步顶升起模结构包括起模顶升油缸,所述起模顶升油缸安装在所述夹持臂底部,所述起模顶升油缸活塞端安装组合式等高块。
12.本技术的积极进步效果在于:1、本发明结构简单,占用空间小;肩梁采用ⅱ型特殊结构,适应重载大吨位要求。肩梁两端板用螺栓连接,夹持臂可拆卸,便于运输、安装、维护与检修。
13.2、本发明具有压变转换的承重机构。压变承重机构为带有具有弹性层的走行轮与钢性承重块交错排列。夹持臂空载自重由具有弹性轮承担,吊起砂箱负重时弹性被压缩,钢性承重块接触导轨,承担重力。
14.3、本发明具有多指特征的翻转肘臂。安装在翻转主轴上,臂上装有水平锁定块及抓手到位感应元件。臂两端各有一组方型的4
×
2指型夹持块,指夹紧块内有良好的触觉装置,能发出夹持到位,进行工序作业。
15.4、本发明星形多点驱动翻转装置由一大齿轮、若干液压回转装置组成。回转装置输出齿轮与大齿轮啮合,同时驱动翻转主轴,既分散了单齿受力状态又获得较大的翻转力矩。
16.5、本发明随行同步顶箱起模装置由4油缸、几种组合等高块(可随砂箱高度组合)及伺服系统组成。4油缸安装于夹臂翼板内。油缸及组合块由机械手移动带至任一造型工位。起模时等高块先行放置模底板上,4油缸预压等高块然后同步顶升起模。
17.6、本发明适应多指夹持的功能扩展模块机械手可付带一个由多指夹持的功能扩展模块,实现多工序的自动或半自动的机械操作。
附图说明
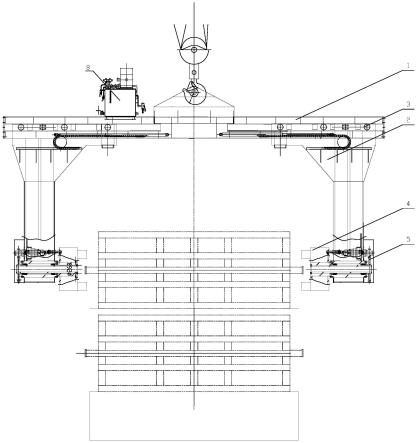
18.图1为本发明的结构示意图。
19.图2-3为本发明肩梁的结构示意图。
20.图4为本发明夹持臂的结构示意图。
21.图5为本发明夹持臂的侧视图。
22.图6为本发明夹持翻转臂的结构示意图。
23.图7为本发明夹持翻转臂驱动机构的结构示意图。
24.图8为本发明夹持臂锁定机构的结构示意图。
25.图9为图8中ii区域的放大结构示意图。
26.图10为本发明同步顶升起模结构的结构示意图。
具体实施方式
27.需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互结合。下面将参考附图并结合实施例来详细说明本发明。
28.为了使本领域技术人员更好地理解本发明方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分的实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
29.需要说明的是,本发明的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本发明的实施例。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖他的包括,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
30.图1-10中,包括肩梁1、夹持臂2、吊耳10、导轨13、夹臂体17、导向轮18等。
31.如图1所示,本发明是一种多指多功能铸造机械手,包括肩梁1,肩梁1上滑动安装夹持臂2,夹持臂2上设有夹持翻转机构,夹持翻转机构一侧设有同步顶升起模结构。
32.如图2-3所示,肩梁1上部为吊耳10,肩梁1两侧分别水平设有两根平行的h型横臂12,h型横臂12两侧设有c型导轨13。
33.吊耳10用于连接车间顶部的天车,实现机械手的移动。
34.如图4-5所示,夹持臂2包括夹臂体17,夹臂体17上部安装导向件,导向件位于导轨13中。
35.导向件为导向轮18,导向轮18转动安装于夹臂体17上部,导向轮18在c型导轨13中滚动。
36.导向轮18外周为弹性层,可缓冲运动中产生的振动。
37.导向轮18之间设有刚性承重块19,夹持臂空载自重由具有导向轮18承担,吊起砂箱负重时弹性被压缩,刚性承重块19接触导轨13,承担重力。
38.夹持臂2由夹持臂驱动装置驱动,在本实施例中,夹持臂驱动装置为夹持臂驱动油缸,夹持臂驱动油缸缸体安装在肩梁1,夹持臂驱动油缸活塞端水平设置,并连接夹持臂2,可通过夹持臂驱动油缸缸体活塞端的伸缩来实现夹持臂2在肩梁1上的移动。
39.夹持翻转机构包括夹持翻转臂,夹持翻转臂由夹持翻转臂驱动机构驱动。夹持翻转臂镜像设置于肩梁1上。如图6所示,夹持翻转臂包括翻转主轴31,翻转主轴31一端通过轴承转动安装于夹臂体17下部,翻转主轴31另一端通过键槽结构安装翻转肘30,翻转肘30上镜像安装指型爪29,指型爪29相对设置的一侧设有夹持斜面29-1,镜像设置的夹持斜面29-1构成了夹持卡口。
40.夹抓指29带有触觉性,内装夹紧传感器及压向力传感器,能发出夹紧讯号及吊重讯号,控制起模装态。
41.如图7所示,夹持翻转臂驱动机构包括夹持翻转臂旋转驱动装置,翻转臂旋转驱动装置安装在夹臂体17下部,翻转臂旋转驱动装置输出端通过传动结构连接翻转主轴31。
42.翻转臂旋转驱动装置可以为电机或者液压旋转装置。
43.传动结构包括主动齿轮36和从动齿轮37,主动齿轮36安装在翻转臂旋转驱动装置输出端,从动齿轮37通过键槽结构安装在翻转主轴31中部,主动齿轮36与从动齿轮37相啮合。
44.传动齿轮结构外部由罩壳密盖,安全性、养护环景良好。
45.翻转臂旋转驱动装置通过传动齿轮结构带动翻转主轴31转动。
46.可通过多套夹持翻转臂驱动机构来增加翻转主轴31的扭矩。
47.为了保持肘臂锁定在工作时的稳定,在夹持臂2上设置夹持臂锁定机构,如图8-9所示,夹持臂锁定机构包括锁定油缸40,锁定油缸40水平安装于夹臂体17下部,锁定油缸40输出轴朝向翻转肘30,并通过方形导向座安装方型斜面锁销44,翻转肘30同侧开有方型锁定孔,方型锁定孔中安装定位斜块45。
48.当起模与吊起砂箱平移时,锁定油缸40推动斜面方销44伸出,斜面方销44与定位斜块45两斜面贴合,将翻转肘30锁定在水平位,防止齿隙或砂箱偏重造成的晃动与歪斜。
49.如图10所示,同步顶升起模结构包括起模顶升油缸41,数个起模顶升油缸41安装
在夹持臂2底部,起模顶升油缸41活塞端竖直向下,安装组合式等高块42,组合式等高块42的长度根据实际工况进行调整。
50.本发明的工作过程如下:砂箱两侧设有夹持凸缘。夹持臂2在肩梁1上移动,直至夹持卡口与夹持凸缘卡接,完成夹臂2与砂箱的固定。起模顶升油缸41活塞杆向下顶出,组合式等高块42使砂箱脱离模型。
51.翻转肘30翻转及锁定。
52.可以理解的是,以上实施方式仅仅是为了说明本发明的原理而采用的示例性实施方式,然而本发明并不局限于此。对于本领域内的普通技术人员而言,在不脱离本发明的精神和实质的情况下,可以做出各种变型和改进,这些变型和改进也视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。