1.本实用新型属于服务机器人技术领域,具体涉及一种多功能商用服务机器人的运动底盘结构。
背景技术:
2.服务机器人是机器人家族中的一个年轻成员,尚没有一个严格的定义。不同国家对服务机器人的认识不同。可以分为专业领域服务机器人和个人/家庭服务机器人,服务机器人的应用范围很广,主要从事维护保养、修理、运输、清洗、保安、救援、监护等工作。
3.在现有技术中,一些服务机器人在服务过程中,需要流动对不同的人员进行服务,在移动过程中会出现地面不平的情况,在移动过程中会发生晃动,影响使用寿命。
技术实现要素:
4.本实用新型的目的在于提供一种多功能商用服务机器人的运动底盘结构,旨在解决现有技术中的一些服务机器人在服务过程中,需要流动对不同的人员进行服务,在移动过程中会出现地面不平的情况,在移动过程中会发生晃动,影响使用寿命的问题。
5.为实现上述目的,本实用新型提供如下技术方案:
6.一种多功能商用服务机器人的运动底盘结构,包括:
7.底座,所述底座的上端固定连接有双头减速电机,底座的上侧设置有连接座,所述底座的两个侧端分别转动连接有轮子,所述双头减速电机的两个输出端分别与两个轮子的侧端固定;以及
8.两组减震机构,每组所述减震机构均包括矩形槽、两个滑块、两个支杆和两个减震弹簧,所述矩形槽开设于底座的上端,两个所述滑块均滑动连接于矩形槽内,两个所述减震弹簧分别固定连接于矩形槽的两个侧壁,且两个减震弹簧的另一侧端分别与两个滑块固定,两个所述支杆分别活动铰接于两个滑块的上端,所述连接座活动铰接于两个支杆的上端。
9.作为本实用新型一种优选的方案,所述连接座的两端均固定连接有保护壳。
10.作为本实用新型一种优选的方案,所述底座的上端固定连接有两个缓冲弹簧,两个所述缓冲弹簧的上端均与连接座的下端固定。
11.作为本实用新型一种优选的方案,所述矩形槽的两个侧壁之间固定连接有限位杆,两个所述滑块均滑动连接于限位杆的圆周表面。
12.作为本实用新型一种优选的方案,所述底座的前端固定连接有红外线探测仪。
13.作为本实用新型一种优选的方案,所述连接座内设置有控制器和蓄电池,所述红外线探测仪和双头减速电机与控制器信号连接,所述控制器、双头减速电机和红外线探测仪与蓄电池电性连接。
14.与现有技术相比,本实用新型的有益效果是:
15.1、本方案中启动双头减速电机,双头减速电机带动两个轮子转动,轮子带动底座
开始移动,当轮子经过不平的地面时,连接座产生晃动,连接座产生作用力时,两个支杆推动滑块向远离对方的方向移动,两个减震弹簧处于压缩状态,当连接座不晃的时候,减震弹簧由于自身弹性回复带动滑块回到原位,本装置中减震弹簧可以降低连接座产生的作用力,使得连接座以上在移动时更加平稳,提高使用寿命。
16.2、本方案中红外线探测仪可以检测到前方有物体经过,红外线探测仪向控制器发出信号,控制器控制双头减速电机紧急停止,本装置可以防止机器人撞到行人或者墙面等物体,提高使用寿命和安全性。
17.3、本方案中两个滑块滑动连接于限位杆的圆周表面,可以防止滑块在滑动过程中产生晃动,脱离矩形槽内,也可以防止减震弹簧被压缩或者自身弹性回复时发生形变,使得本装置更加的稳固。
附图说明
18.附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制。在附图中:
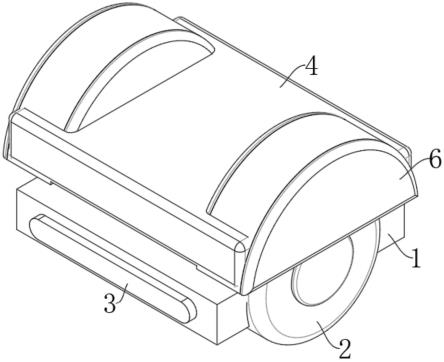
19.图1为本实用新型中的第一立体图;
20.图2为本实用新型中的局部立体图;
21.图3为本实用新型图2中a处的局部放大图;
22.图4为本实用新型中的第二立体图。
23.图中:1、底座;2、轮子;3、红外线探测仪;4、连接座;5、缓冲弹簧;6、保护壳;7、矩形槽;8、减震弹簧;9、滑块;10、支杆;11、限位杆;12、双头减速电机;13、控制器;14、蓄电池。
具体实施方式
24.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
25.实施例1
26.请参阅图1-4,本实用新型提供以下技术方案:
27.一种多功能商用服务机器人的运动底盘结构,包括:
28.底座1,底座1的上端固定连接有双头减速电机12,底座1的上侧设置有连接座4,底座1的两个侧端分别转动连接有轮子2,双头减速电机12的两个输出端分别与两个轮子2的侧端固定;以及
29.两组减震机构,每组减震机构均包括矩形槽7、两个滑块9、两个支杆10和两个减震弹簧8,矩形槽7开设于底座1的上端,两个滑块9均滑动连接于矩形槽7内,两个减震弹簧8分别固定连接于矩形槽7的两个侧壁,且两个减震弹簧8的另一侧端分别与两个滑块9固定,两个支杆10分别活动铰接于两个滑块9的上端,连接座4活动铰接于两个支杆10的上端。
30.在本实用新型的具体实施例中,启动双头减速电机12,双头减速电机12带动两个轮子2转动,轮子2带动底座1开始移动,当轮子2经过不平的地面时,连接座4产生晃动,连接座4产生作用力时,两个支杆10推动滑块9向远离对方的方向移动,两个减震弹簧8处于压缩
状态,当连接座4不晃的时候,减震弹簧8由于自身弹性回复带动滑块9回到原位,红外线探测仪3可以检测到前方有物体经过,红外线探测仪3向控制器13发出信号,控制器13控制双头减速电机12紧急停止,可以防止机器人撞到行人或者墙面等物体,提高使用寿命和安全性,本装置中减震弹簧8可以降低连接座4产生的作用力,使得连接座4以上在移动时更加平稳,提高使用寿命,需要进行说明的是:具体使用何种型号的双头减速电机12由熟悉本领域的相关技术人员自行选择,且以上关于双头减速电机12、控制器13、蓄电池14和红外线探测仪3等均属于现有技术,本方案不做赘述。
31.具体的请参阅图1,连接座4的两端均固定连接有保护壳6。
32.本实施例中:保护壳6对轮子2起到防护作用。
33.具体的请参阅图4,底座1的上端固定连接有两个缓冲弹簧5,两个缓冲弹簧5的上端均与连接座4的下端固定。
34.本实施例中:缓冲弹簧5可以提高连接座4的平稳性。
35.具体的请参阅图3,矩形槽7的两个侧壁之间固定连接有限位杆11,两个滑块9均滑动连接于限位杆11的圆周表面。
36.本实施例中:两个滑块9滑动连接于限位杆11的圆周表面,可以防止滑块9在滑动过程中产生晃动,脱离矩形槽7内,也可以防止减震弹簧8被压缩或者自身弹性回复时发生形变,使得本装置更加的稳固。
37.具体的请参阅图1,底座1的前端固定连接有红外线探测仪3。
38.本实施例中:红外线探测仪3可以检测到前方有物体经过。
39.具体的请参阅图2,连接座4内设置有控制器13和蓄电池14,红外线探测仪3和双头减速电机12与控制器13信号连接,控制器13、双头减速电机12和红外线探测仪3与蓄电池14电性连接。
40.本实施例中:红外线探测仪3可以检测到前方有物体经过,红外线探测仪3向控制器13发出信号,控制器13控制双头减速电机12紧急停止,本装置可以防止机器人撞到行人或者墙面等物体,提高使用寿命和安全性。
41.本实用新型的工作原理及使用流程:启动双头减速电机12,双头减速电机12带动两个轮子2转动,轮子2带动底座1开始移动,当轮子2经过不平的地面时,连接座4产生晃动,连接座4产生作用力时,两个支杆10推动滑块9向远离对方的方向移动,两个减震弹簧8处于压缩状态,当连接座4不晃的时候,减震弹簧8由于自身弹性回复带动滑块9回到原位,红外线探测仪3可以检测到前方有物体经过,红外线探测仪3向控制器13发出信号,控制器13控制双头减速电机12紧急停止,可以防止机器人撞到行人或者墙面等物体,提高使用寿命和安全性,本装置中减震弹簧8可以降低连接座4产生的作用力,使得连接座4以上在移动时更加平稳,提高使用寿命。
42.最后应说明的是:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
