技术特征:
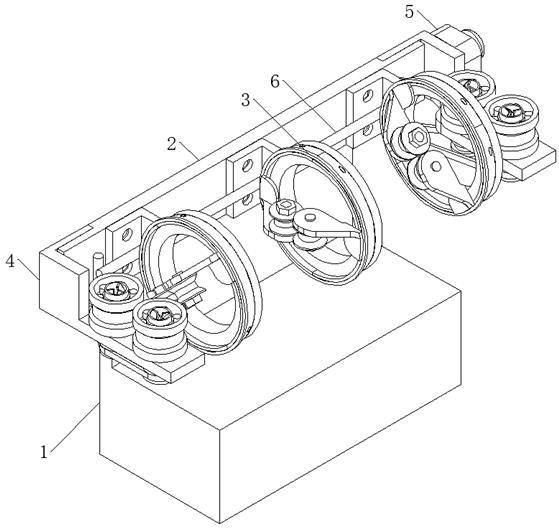
1.一种连铸中间包智能焊接设备,用于将锚固杆焊接于中间包包盖钢制外壳上,其特征在于,包括:驱动辊、检测辊、上机架、下机架以及焊枪;所述驱动辊转动安装在上机架上,其外缘紧贴钢制外壳上表面,用于驱动智能焊接设备前进;所述检测辊设置于下机架上,其外缘紧贴钢制外壳下表面,用于检测钢制外壳上的孔洞;所述驱动辊与所述检测辊的直径相同,且驱动辊和检测辊的外缘周长等于锚固杆焊接间距的4倍;所述焊枪转动安装于下机架上,并且设置于检测辊前进方向的后侧,所述焊枪在竖直状态下,焊枪中轴线与检测辊中轴线的距离等于锚固杆焊接间距。2.如权利要求1所述的一种连铸中间包智能焊接设备,其特征在于:还包括导杆和伸缩缸,所述上机架与下机架之间通过导杆以及伸缩缸连接。3.如权利要求2所述的一种连铸中间包智能焊接设备,其特征在于:所述焊枪包括工步旋转机构、伸缩机构、旋转焊接机构、锚杆夹持机构以及焊头;所述工步旋转机构驱动焊枪围绕下机架在水平和竖直位置旋转;所述伸缩机构谓设置于焊枪的底部的齿轮-齿条伸缩结构,在所述伸缩机构的齿条末端,设置有旋转焊接机构、锚杆夹持机构以及焊头。4.如权利要求3所述的一种连铸中间包智能焊接设备,其特征在于:所述焊头首端设置于旋转焊接机构上,焊头的另一端对准锚固杆与钢制外壳的连接部位,旋转焊接机构为电机驱动的转动盘体结构,通过旋转焊接机构的旋转一周,可以完成焊头对锚固杆连接处一周的焊接。5.如权利要求4所述的一种连铸中间包智能焊接设备,其特征在于:所述旋转焊接机构中心位置,设置有锚杆夹持机构,锚杆夹持机构在焊枪水平位置、竖直位置以及焊接过程中,会对锚固杆进行夹持固定。6.如权利要求5所述的一种连铸中间包智能焊接设备,其特征在于:在检测辊的外缘上,沿轴线方向设置了四组与焊接点位对应的检测头。7.如权利要求6所述的一种连铸中间包智能焊接设备,其特征在于: 四组检测头沿检测辊外缘周向均匀布置,每个检测头包括金属球、弹簧、电触点、检测孔,金属球通过弹簧的连接设置在检测孔中,弹簧为压缩弹簧,电触点设置在检测孔底部,当电触点与金属球接触时,电触点414会被导通。8.如权利要求7所述的一种连铸中间包智能焊接设备,其特征在于:同一截面位置的四个检测头为一组,每两个检测头之间的弧间距为锚固杆的焊接间距,并且该同一截面的一组检测头均与该截面位置对应的焊枪信号连接。9.如权利要求8所述的一种连铸中间包智能焊接设备,还设置有稳定轮,稳定轮转动安装在上机架和下机架上,稳定轮的轮缘紧贴钢制外壳的表面。10.如权利要求1-9所述的任一一种连铸中间包智能焊接设备的使用方法,其特征在于:智能焊接设备包括三个焊接工步:s1上料工步,上料工步中工步旋转机构,驱动焊枪转动至于钢制外壳平行的水平位置,伸缩机构将焊头缩回,在上料工步中送料机构将若干锚固杆分别送入焊枪的锚杆夹持机构
上,完成锚固杆的上料;s2焊接工步,从上料工步到焊接工步中,首先工步旋转机构驱动焊枪转动至与钢制外壳垂直的竖直位置,随后伸缩机构驱动齿条伸出,将锚固杆伸出至与钢制外壳接触,随后旋转焊接机构驱动焊头转动,同时焊头通电,旋转焊接机构通过一周的转动,将锚固杆焊接在钢制外壳1的底部;s3退枪步进工步,从焊接工步到退枪步进工步中,首先伸缩机构,驱动齿条缩回,将焊头退回,然后工步旋转机构驱动焊枪从竖直位置转动至水平位置,最后驱动辊向前转动一个工位,使智能焊接设备进入下一个上料工步。
技术总结
本发明公开了一种连铸中间包智能焊接设备及其使用方法,属于焊接设备技术领域,解决了对于使用寿命较短的中间包包盖,需要反复更换新的包盖备件的问题,本发明焊接设备包括驱动辊、检测辊、上机架、下机架、稳定轮、导杆、伸缩缸以及焊枪,驱动辊和检测辊为外径相同的长圆柱辊,分别设置于钢制外壳的上下两侧,驱动辊转动安装在上机架上,其外缘紧贴钢制外壳上表面,用于驱动智能焊接设备前进;检测辊设置于下机架上,其外缘紧贴钢制外壳下表面,并且检测辊上设置有检测头,用于检测钢制外壳上的孔洞。通过上料工步、焊接工步以及退枪工步,完成了焊接设备对中间包钢制外壳表面的锚固杆的焊接以及步进,实现了对中间包包盖锚固杆的智能焊接。智能焊接。智能焊接。
技术研发人员:张毅 卫志龙
受保护的技术使用者:济南白马华谊耐火材料有限公司
技术研发日:2022.06.16
技术公布日:2022/7/15
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。