1.本发明涉及一种用于使用电磁(em)能量切割、凝结和消融生物组织的电外科切除器工具。具体地,本发明涉及一种电外科切除器工具,所述电外科切除器工具具有能够在打开位置和闭合位置之间相对于彼此移动的第一刀片元件和第二刀片元件,并且还具有行程限制机构,所述行程限制机构能够操作以限制在打开位置和/或闭合位置中第一刀片元件和第二刀片元件之间的相对移动的最大程度。
背景技术:
2.手术切除是从人体或动物体内去除器官部分的手段。器官可能是高度血管化的。当组织被切割(即分开或横切)时,小血管可能受损或破裂。最初是出血,接着是凝血级联,其中血液变成凝块以试图堵塞出血。在手术期间,期望使患者的出血情况尽可能少,因此已开发出各种装置以试图提供无出血的切割。对于内窥镜手术,也不希望发生出血以及出血不能方便处理的情况,这是因为血流可能会模糊操作者的视线。代替锋利的刀片,已知使用rf能量来切割生物组织。使用rf能量的切割方法利用以下原理操作,即当电流通过组织基质时(在离子细胞内容物的辅助下),对通过组织的电子流的阻抗产生热量。当将纯正弦波施加到组织基质时,在细胞内产生足够的热量以使组织的水分蒸发。因此,细胞膜无法控制细胞内压的大幅上升,从而导致细胞破裂。当这种情况大面积发生时,可看到组织被横切。
3.上述过程在瘠瘦组织中工作良好,但在脂肪组织中效率较低,这是因为帮助电子通过的离子成分较少。这意味着蒸发细胞的内容物所需的能量要大得多,因为脂肪的蒸发潜热远大于水的蒸发潜热。rf凝结通过向组织施加效率较低的波形来进行操作,由此细胞的内容物被加热到约65℃而不是被蒸发,从而通过干燥来干燥组织和使血管壁中的蛋白质变性。这种变性对凝血级联起到刺激作用,因此凝血得到增强。同时,壁中的胶原变性(从杆状分子变成线圈状分子),使得血管收缩并且尺寸减小,从而为凝块提供锚定点并且要堵塞的面积较小。
4.然而,当存在脂肪组织时,rf凝结的效率较低,这是因为电效应被减弱。因此,可能非常难以密封脂肪出血点。组织没有干净的白色边缘,而是具有变黑的烧伤外观。
技术实现要素:
5.最一般地,本发明提供了对在gb2567480中讨论的电外科切除器工具概念的改进。电外科切除器工具具有能量递送结构,所述能量递送结构便于使用电磁(em)能量切割和密封生物组织。具体地,本发明涉及组合的致动和能量递送机构,所述致动和能量递送机构足够紧凑,以使得工具能够插入穿过诸如内窥镜、胃镜或支气管镜的外科观测装置的器械通道。装置也可用于执行腹腔镜或开放手术,即在腹腔开放的情况下进行肝叶的无血切除。
6.电外科切除器工具具有器械尖端,所述器械尖端具有能够在打开位置和闭合位置之间相对于彼此移动的第一刀片元件和第二刀片元件,并且改进可包括行程限制机构,所述行程限制机构能够操作以限制在打开位置和/或闭合位置中第一刀片元件和第二刀片元
件之间的相对移动的最大程度。以这种方式,可避免切除器工具钳夹的过度受力,并且可确保平稳的、可预测的钳夹移动。
7.此外,电外科切除器工具可包括用于控制第一刀片元件和第二刀片元件之间的相对移动的控制杆,并且改进可包括重叠管的组,所述重叠管的组提供控制杆可滑动穿过的通道并且固定到器械尖端。这样,控制杆的移动可为平稳的和可预测的。
8.根据本发明的第一方面,提供了一种电外科切除器工具,其包括:轴,所述轴限定内腔;能量输送结构,所述能量输送结构用于运送电磁(em)能量穿过轴的内腔;器械尖端,所述器械尖端安装在轴的远侧端部处,其中所述器械尖端包括:静止部分,所述静止部分包括第一刀片元件;以及可移动部分,所述可移动部分包括第二刀片元件,其中可移动部分能够相对于静止部分在闭合位置至打开位置之间移动,在闭合位置中,第一刀片元件和第二刀片元件彼此并排放置,在打开位置中,第二刀片元件与第一刀片元件间隔开用于接收生物组织的间隙;行程限制机构,所述行程限制机构能够操作以限制在打开位置和/或闭合位置中第二刀片元件和第一刀片元件之间的相对移动的最大程度;第一电极、第二电极和平面介电体,第一电极和第二电极通过平面介电体彼此间隔开并且电隔离,并且其中第一电极和第二电极连接到能量输送结构以用于从器械尖端递送em能量;以及致动器,所述致动器用于控制可移动部分和静止部分之间的相对移动。致动器可为与器械尖端独立的元件,但连接到器械尖端以打开和闭合刀片元件。
9.任选地,第一刀片元件和第二刀片元件中的一者包括平面介电体,所述平面介电体纵向延伸并且在其第一侧向面向表面上具有第一电极,并且其中,在闭合位置中,第一刀片元件和第二刀片元件中的另一者邻近纵向延伸的平面介电体的的第二侧向面向表面放置,所述第二侧向面向表面与平面介电体的第一侧向面向表面相对。
10.任选地,第二刀片元件具有与第一刀片元件的长度相当的长度。
11.任选地,能量输送结构包括在纵向方向上延伸穿过内腔的同轴传输线。同轴传输线包括通过介电材料与外导体分开的内导体。内导体连接到第一电极和第二电极中的一者,并且外导体连接到第一电极和第二电极中的另一者,以用于从器械尖端递送em能量。
12.任选地,能量输送结构用于运送射频(rf)电磁(em)能量和微波em能量,并且其中第一电极和第二电极能够操作:作为用于递送从能量输送结构输送的rf能量的有源电极和返回电极;以及用于递送从能量输送结构输送的微波能量的微波场发射结构。电外科切除器工具可提供有助于使用射频(rf)电磁能量和/或微波em能量来切割和封闭生物组织的多种操作模式。在一个示例中,电外科切除器工具可包括提供剪刀状机构的一对刀片元件,所述剪刀状机构可提供三种互补模式:(i)当刀片元件闭合时的滑动的基于rf的切割,(ii)使用rf能量和所施加压力的组合对抓持在刀片元件之间的组织执行剪式切割,以及(iii)使用微波能量和所施加的压力的组合对抓持在刀片元件之间的组织执行凝结或血管封闭操作。此外,可以以这些模式中的任何模式以足以引起组织消融的功率水平来供应rf和/或微波能量。通过在刀片元件上适当地配置一对电极,在这些操作模式的每一种模式中所供应的rf能量或微波能量可聚焦在所需的区域中。一对电极可都在同一刀片元件上,或者每个刀片元件上可存在一个电极。然而,应该理解的是,在一些实施方案中,可仅递送rf em能量,或者仅递送微波em能量。
13.在这种结构中,第一刀片元件和第二刀片元件可类似于剪式闭合机构。因此,第二
刀片元件可布置成在打开位置和闭合位置之间的移动期间滑动经过第一刀片元件,例如以通过施加剪切力来实现机械切割。可移动部分能够在与由平面介电体限定的平面平行的平面中相对于静止部分移动。在此,术语“静止”可表示在使用时(即,当第二刀片元件在打开位置和闭合位置之间移动时)相对于轴的远侧端部固定。
14.轴可为柔性的,例如适于弯曲或其他转向,以到达处理部位。柔性轴可使得装置能够用于外科观测装置诸如内窥镜。在其他示例中,轴可为刚性的,例如用于开放式手术或与腹腔镜一起使用。
15.第一电极和第二电极可设置在切割界面处。在一个示例中,两个电极都位于同一刀片元件上,所述刀片元件可位于可移动部分或者静止部分上。例如,第二电极可位于纵向延伸的平面介电体的第二侧向面向表面上。这有助于在切割界面处提供均匀的能量递送。在两个电极都位于一个刀片元件上的情况下,另一个刀片元件可为电惰性的,例如由塑料或其他绝缘体制成。
16.在另一个示例中,第一电极可位于刀片元件中的一个上,并且第二电极位于另一个刀片元件上。例如,纵向延伸的平面介电体可位于第一刀片元件上,并且第二电极可沿第二刀片元件的侧面延伸。
17.因此,第一电极和第二电极可沿切割界面的每一侧设置,其中平面介电体位于第一电极和第二电极之间。在这种布置中,如果rf em能量被施加到电极,则rf em能量优选跨切割界面在第一刀片元件和第二刀片元件之间流动。类似地,如果在刀片元件打开时施加微波em能量,则由电极发射的微波场在刀片元件之间的间隙内具有比别处高得多的场强。
18.当在闭合位置中时,第二电极通过平面介电体沿其大部分长度与第一电极分开。如果在此位置中施加rf em能量,则rf em能量优选围绕闭合刀片元件的远侧尖端和侧边缘流动,这有助于通过使器械尖端滑动穿过组织来执行仅rf的滑动切割。
19.可移动部分并且因此第二刀片元件可由涂覆有绝缘体的导电材料形成,所述涂覆有绝缘体的导电材料还涂覆有聚对二甲苯n。例如,可移动部分可为具有陶瓷(例如氧化铝喷剂)、合成塑料(例如bakelite)、类金刚石碳(dlc)、搪瓷涂层或硅基涂料涂层的不锈钢铸件。第二电极可形成在第二刀片元件的绝缘体涂层和聚对二甲苯n涂层被移除的侧部处。第二电极可为可移动部分的暴露的导电材料,或者可包括沉积或以其他方式附连到暴露的导电材料的(例如,金等的)附加导电层。
20.第二刀片元件可包括沿其侧部的侧向突出的凸缘。当在闭合位置中时,凸缘因此朝向第一刀片元件突出。第二电极可形成在侧向突出的凸缘的侧向面向边缘上。
21.行程限制机构可为器械尖端的特征部。这样,器械尖端的结构特征部可协作以限定第一刀片元件和第二刀片元件在打开位置和/或闭合位置中的相对位置。这使得打开位置和/或闭合位置是一致的,并且在应用之间不会变化。这可能不同于传统技术,在传统技术中,致动器或控制杆通过具有有限行程来限定这些相对位置。也就是说,传统上,控制杆可在轴内滑动的距离量可能例如受到轴的近侧端部的手持件的限制。假定各个元件在轴中挠曲,则这种类型的机构可导致可变的打开位置和/或闭合位置,这在使用器械尖端执行的某些精密操作中是不期望的。行程限制机构可由形成在静止部分和可移动部分上的一对或多对协作结构形成。也就是说,对于每一对,一个协作结构形成在静止部分上,而另一个协作结构形成在可移动部分上。一对协作结构可用于限制在打开位置中第二刀片元件和第一
刀片元件之间的相对移动的最大程度,而另一对协作结构可用于限制在闭合位置中第二刀片元件和第一刀片元件之间的相对移动的最大程度。行程限制机构可在打开位置中将第一刀片元件和第二刀片元件之间的最大角度限制为约60度。
22.第一对协作结构可包括凸起突出部和协作止动表面(其可基本上与周围表面齐平),其中凸起突出部和止动表面被配置或布置成在使用中在打开位置中彼此邻接。也就是说,将可移动部分移动到打开位置中将凸起突出部移动到与止动表面接触,使得防止第一刀片元件和第二刀片元件的进一步打开。也就是说,防止第二刀片元件进一步移动经过第一刀片元件。止动表面和/或凸起突出部可为尺寸和/或形状被设定成限制第一刀片元件和第二刀片元件可移动多远的专门形成的结构。在一个实施方案中,可移动部分包括凸起突出部,并且静止部分包括止动表面。具体地,凸起突出部可形成在可移动部分的顶表面上并且在可移动部分和静止部分之间的连接部(例如,枢转连接部)的远侧。此外,止动表面可形成在静止部分的顶表面上并且在可移动部分和静止部分之间的连接部的近侧。止动表面可以由通过支撑臂形成在静止部分中的狭槽提供,可移动部分附接到支撑臂。
23.第二对协作结构可包括一对邻接表面,其中所述对邻接表面被配置为在使用中在闭合位置以平行形式彼此邻接。也就是说,将可移动部分移动到闭合位置中将两个邻接表面移动到一起,使得它们彼此接触并且基本上彼此平行。通过沿表面而不是点进行接触,该工具可提供坚固且可靠的闭合机构,这在例如使用第一刀片元件和第二刀片元件切割组织时是有利的。在一个实施方案中,第一邻接表面形成在可移动部分的顶表面上并且在可移动部分和静止部分之间的连接部(例如,枢转连接部)的近侧。第一邻接表面可形成为可移动部分的附接板的顶表面,其中附接板为可移动部分的近侧延伸部,所述近侧延伸部在至静止部分的连接部的近侧延伸。附接板的尺寸和/或形状可被设定成限制第二刀片元件在闭合方向(即,从打开位置到闭合位置行进的方向)上可移动经过第一刀片元件多远。此外,第二邻接表面形成在静止部分的下表面上并且在可移动部分和静止部分之间的连接部的近侧。第二邻接表面可形成为静止部分的支撑臂的下侧。支撑臂可为静止部分的限定容纳可移动部分相对于静止部分的移动的狭槽的侧向和前向(即向远侧延伸)延伸部。可移动部分可通过支撑臂连接(例如,枢转连接)到静止部分。支撑臂的尺寸和/或形状可被设定成限制第二刀片元件在闭合方向(即,从打开位置到闭合位置行进的方向)上可移动经过第一刀片元件多远。
24.如上所述,静止部分可包括支撑臂,可移动部分安装在所述支撑臂上,并且支撑臂可在静止部分中限定狭槽,以用于接收可移动部分的一部分。狭槽的长度(即与轴长度一致的维度)可在1mm和3mm之间(优选小于约2mm)。狭槽的宽度(即与枢轴线一致的维度)可在0.2mm和1.2mm之间(优选大于约0.7mm)。狭槽的深度可在0.2mm和1.2mm之间(优选地大于约0.6mm)。狭槽可能是必要的,以便为可移动部分的一部分(例如,近侧部分)提供在打开位置和闭合位置之间相对于静止部分移动的空间。支撑臂可形成能量输送结构和第二电极之间的电连接部的一部分。例如,静止部分(例如支撑臂)可由涂覆有绝缘体的导电材料形成,所述涂覆有绝缘体的导电材料还涂覆有聚对二甲苯n,并且可包括近侧接触部分,在所述近侧接触部分处,绝缘体涂层和聚对二甲苯n涂层被移除,并且所述近侧接触部分电连接到同轴传输线的内导体或外导体。限制狭槽的维度的优点在于可确保更高质量的涂层(例如绝缘体和/或聚对二甲苯n涂层)。例如,更容易确保涂层完整和均匀。静止部分(例如支撑臂)可
具有用于附接到同轴传输线的远侧端部的近侧凹陷部。也可以使用其他类型的电连接部。例如,柔性导体可连接在能量输送结构(例如,同轴传输线的内导体或外导体)和第一电极或第二电极之间。优选地,任何柔性导体的长度等于或小于微波能量的波长的八分之一,以便于防止其影响发射场。
25.同轴传输线可适于输送rf em能量和微波em能量中的任一种或两种。或者,能量输送结构可包括rf em能量和微波em能量的不同路径。例如,微波em能量可通过同轴传输线递送,而rf em能量可经由双绞线等递送。在提供单独的能量递送路径的情况下,第一电极和第二电极可包括单独的rf电极部分和微波电极部分,以使得rf能量和微波能量能够从器械尖端的不同区域递送。例如,微波能量可从刀片元件之一递送,而rf能量可在刀片元件之间递送。在另一个实施方案中,电外科工具仅被配置为仅递送rf em能量和微波em能量中的一种。
26.可移动部分可经由枢转连接部被安装到支撑臂。例如,支撑臂可提供支撑枢轴的u形夹类型的结构,可移动部分安装在所述枢轴上。能量输送结构和第二电极之间的电连接部经过枢转连接部。例如,枢轴可由导电材料形成,并且可移动部分和支撑臂的绝缘涂层(和聚对二甲苯n涂层)可在它们分别接触枢轴的位置被移除。
27.同轴传输线的介电材料和内导体可延伸到外导体的远侧端部之外。内导体可以包括暴露的远侧部分,其例如通过与第一电极的近侧部分直接重叠并接触而电连接到第一电极。
28.可移动部分和静止部分之间的移动可为旋转的或平移的或两者的组合。在一个示例中,可移动部分可相对于静止部分枢转,由此第二刀片元件在打开位置中相对于第一刀片元件成角度。这个示例可类似于常规剪式闭合件。第二刀片元件能够在打开位置和闭合位置之间仅移动通过锐角(即不是钝角)。在一个实施方案中,行程限制机构可被配置成将锐角限制在90度和40度之间,并且优选在80度和50度之间,并且更优选为约60度。除此之外或另选地,行程限制机构可被配置成将在打开位置中的钳夹之间的最大距离限制为约3.5mm。
29.致动器可包括可滑动地安装在柔性轴中的控制杆。控制杆可具有与可移动部分接合的附接特征部,由此控制杆在轴中的纵向移动引起可移动部分相对于静止部分移动。附接特征部可为用于将推力和拉力传输到可移动部分的钩或任何合适的接合部。可移动部分可包括孔口(例如圆孔),并且附接特征部(例如钩)可被配置成配合在孔内,以驱动第二刀片元件移动经过第一刀片元件。圆孔直径可仅略大于控制杆直径,使得防止附接特征部(例如钩)在孔内纵向移动。这可确保钳夹移动是平稳的和可预测的,这是因为大多数或所有控制杆的纵向滑动移动都被转化为钳夹移动。
30.静止部分可包括为可移动部分提供安装基座(例如枢轴基座)的支撑臂。平面介电体可为安装在(例如粘附或以其他方式附连到)支撑臂上的单独一块材料。平面介电体可由陶瓷(例如氧化铝)形成。在此,对“平面”材料的提及可指具有基本上小于其宽度和长度的厚度的平坦材料片。平面介电体可具有在纵向上对齐的长度维度、在侧向上对齐的厚度维度以及与长度维度和厚度维度两者都正交的宽度维度。平面介电体的平面是长度维度和宽度维度所在的平面,即与宽度维度正交的平面。
31.第一电极可为沉积或以其他方式安装在平面介电体的第一侧向面向表面上的导
电材料(例如金)。面向与第一侧向面向表面相反方向的平面介电体的第二侧向面向表面可暴露在切割界面处。
32.器械尖端可包括安装在静止部分周围的护罩。护罩可包括安装在静止部分周围的绝缘覆盖物。例如,绝缘护罩可覆盖静止部分的支撑臂。绝缘护罩也可用于部分覆盖第一电极,例如以确保第一电极的暴露部分具有用于控制rf能量或微波能量的递送的期望形状。绝缘覆盖物可具有一个或多个场屏蔽导电区域,例如绝缘覆盖物的外表面上的金属化贴片。这些导电区域可为电场提供护罩,例如以防止来自器械的能量泄漏在不想要的位置中。护罩可在组装后模制在器械尖端上方。可选地,护罩可由绝缘材料管形成,所述绝缘材料管可以被切割(例如激光切割)成期望的形状,然后安装在刀片元件上。护罩可由合适的绝缘塑料例如peek等形成。用于护罩的材料可优选耐高温。
33.第一刀片元件可成形为在其最远侧端部处具有直立齿的纵向延伸的指状物。第二刀片元件可以对应的方式成形,例如作为在其最远侧端部具有向下延伸的齿的细长指状物。当钳夹闭合时,最远侧的齿可帮助将组织保持在钳夹之间的间隙中。此外,第二刀片元件可成形为在最远侧端部和最近侧端部之间的点处包括第二向下延伸的齿。例如,第二向下延伸的齿可位于最远侧端部和最近侧端部之间的沿第二刀片元件的中点处或附近。直立齿和两个向下延伸的齿可组合在一起,以在钳夹闭合时在钳夹之间的间隙中提供改进的组织保持。
34.纵向延伸的插入件可安装在柔性轴的内腔中,以防止致动器或同轴电缆与轴的相对移动导致器械尖端的丢失或跳动。插入件可包括具有形成在其中的多个纵向子内腔的管状主体,其中多个纵向子内腔中的每个破坏管状主体的外表面。管状主体的尺寸被设定成适于紧密配合在内腔中,使得其断开的圆周表面限定邻接轴的内表面以阻止它们之间的相对移动的多个支脚。
35.同轴传输线可包括安装在管状主体的第一子内腔中的同轴电缆。致动器可包括可滑动地安装在管状主体的第二子内腔中的控制杆。控制杆可具有低摩擦涂层(例如,ptfe等),以便于相对于插入件的纵向滑动。可选地,第二子内腔可具有安装在其中的低摩擦管(也称为第一管),其中控制杆可以可滑动地安装在低摩擦管中。
36.电外科切除器工具可包括一起提供了通道的一组重叠的管,控制杆可通过通道滑动以打开和闭合钳夹。该组重叠管可结合到器械尖端(例如静止部分),使得控制杆可以可预测和可靠的方式在通道内滑动。例如,防止通道相对于器械尖端的移动,所述移动可能以其他方式干扰控制杆的平稳移动(例如滑动),并相关联地干扰钳夹的平稳打开和闭合。具体地,可提供第一管(又称为导丝管)、第二管(又称为远侧导丝管)和第三管(又称为短基管)。第一管围绕控制杆的大部分但不围绕控制杆的远侧端部区域。第一管可围绕控制杆的大部分或全部,但不围绕远侧端部区域。也就是说,第一管可以一直向近侧延伸到手持件,并且可能在手持件内部延伸,以便手动控制钳口的打开和闭合。控制杆的远侧端部区域可为最终的4mm至8mm(例如5mm)。第一管可由ptfe等形成。第二管围绕控制杆的远侧端部区域但不围绕控制杆的附接特征部,并且第二管向近侧突出到第一管中,以限定第一管与第二管重叠的重叠区域。附接特征部可占控制杆的最远侧2mm或更小。重叠区域的长度可为第二管的长度的约一半,例如,重叠区域可为约4mm到6mm长,并且第二管的长度可为约8mm到12mm。第二管可由ptfe等形成。同样,第三管围绕重叠区域并且围绕静止部分的近侧端部区
域。重叠区域的长度可为第三管的长度的约一半,例如,重叠区域可为约4mm到6mm长,并且第三管的长度可为约8mm到12mm。第三管可由聚醚嵌段酰胺(又称为peba、pebax或热塑性弹性体)形成。第一管、第二管和第三管可彼此结合并结合到静止部分。结合可经由胶水或粘合剂,和/或经由重叠管之间的过盈配合。例如,第一管、第二管和第三管可为基本上透明的(即,透明的),并且可通过紫外线粘合剂粘结到器械尖端(例如,静止部分)。
37.器械尖端的维度可被设定成配合在外科观测装置的器械通道内。因此,本发明的第二方面提供了一种电外科设备,其包括:用于提供em能量的电外科发生器;具有用于插入患者体内的器械绳的外科观测装置,所述器械绳具有延伸穿过其中的器械通道;根据第一方面所述的插入穿过外科观测装置的器械通道的电外科切除器工具。
38.任选地,电外科发生器能够供应射频(rf)em能量和微波em能量。
39.根据本发明的第三方面,提供了一种电外科切除器工具,其:轴,所述轴限定内腔;能量输送结构,所述能量输送结构用于运送电磁(em)能量穿过轴的内腔;器械尖端,所述器械尖端安装在轴的远侧端部处,其中所述器械尖端包括:静止部分,所述静止部分包括第一刀片元件;以及可移动部分,所述可移动部分包括第二刀片元件,其中可移动部分能够相对于静止部分在闭合位置至打开位置之间移动,在闭合位置中,第一刀片元件和第二刀片元件彼此并排放置,在打开位置中,第二刀片元件与第一刀片元件间隔开用于接收生物组织的间隙;第一电极、第二电极和平面介电体,第一电极和第二电极通过平面介电体彼此间隔开并且电隔离,并且其中第一电极和第二电极连接到所述能量输送结构以用于从所述器械尖端递送所述em能量;致动器,所述致动器用于控制可移动部分和静止部分之间的相对移动,所述致动器包括可滑动地安装在轴中的控制杆,所述控制杆具有与可移动部分接合的附接特征部,由此控制杆在轴中的纵向移动引起可移动部分相对于静止部分移动;以及第一管、第二管和第三管,其中第一管围绕控制杆但不围绕控制杆的远侧端部区域,其中第二管围绕控制杆的远侧端部区域但不围绕控制杆的附接特征部,并且第二管向近侧突出到第一管中以限定第一管与第二管重叠的重叠区域,并且其中第三管围绕重叠区域并且围绕静止部分的近侧端部区域。
40.第三方面类似于第一方面,不同之处在于:(i)行程限制机构在第三方面中为任选的;以及(ii)第一管、第二管和第三管在第三方面为必要的。第一方面的进一步的特征和优点同样适用,并且因此针对第二方面进行重申。
41.术语“外科观测装置”在本文中可用于意指设置有插入管的任何外科装置,所述插入管为在侵入性手术期间被引入到患者体内的刚性或柔性(例如可转向)导管。插入管可包括器械通道和光学通道(例如用于传输光以在插入管的远侧端部处照亮和/或捕获处理部位的图像)。器械通道可具有适合于接收侵入性手术工具的直径。器械通道的直径可为5mm或更小。
42.在本文中,术语“内”意指径向上更靠近于器械通道和/或同轴电缆的中心(例如,轴)。术语“外”意指径向上更远离器械通道和/或同轴电缆的中心(轴)。
43.除非上下文另外指明,否则术语“导电”在本文中用于意指导电性。
44.在本文中,术语“近侧”和“远侧”是指细长探针的末端。在使用中,近侧端部较接近于用于提供rf能量和/或微波能量的发生器,而远侧端部离发生器较远。
45.在本说明书中,“微波”可广泛用于指示400mhz至100ghz的频率范围,但优选是
1ghz至60ghz的范围。已考虑的特定频率是:915mhz、2.45ghz、3.3ghz、5.8ghz、10ghz、14.5ghz和24ghz。相比之下,本说明书使用“射频”或“rf”来指示至少低三个数量级的频率范围,例如,最高至300mhz,优选是10khz至1mhz,并且最优选是400khz。
附图说明
46.以下参考附图来论述本发明的实施方案,在附图中:
47.图1为作为本发明的实施方案的电外科系统的示意图;
48.图2a为处于闭合构型的本发明的实施方案的电外科切除器器械的器械尖端的透视图;
49.图2b为处于闭合构型的图2a的器械尖端的侧视图;
50.图2c为处于打开构型的图2a的器械尖端的侧视图;
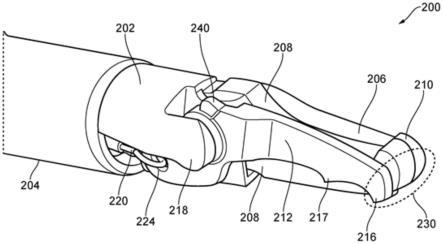
51.图2d为处于打开构型的图2a的器械尖端的透视图;
52.图3a和图3b分别为图2a的器械尖端的侧视图和透视图,但其中移除了外套管以显示内部部件;
53.图4为作为本发明的实施方案的电外科切除器器械的示意性局部剖开侧视图;
54.图5为图2d的复制,但包括对应于图4的标签,以示出图4的示意图如何能够平移到图2a的器械尖端上;
55.图6a为可与作为本发明的实施方案的电外科切除器器械一起使用的器械轴的内容物的透视图;并且
56.图6b为在图6a中所示的器械轴的横截面。
具体实施方式
57.图1为作为本发明的实施方案的完整电外科系统100的示意图。系统被布置成使用来自器械尖端的电磁(em)能量(例如,射频(rf)em能量和/或微波em能量)来处理(例如,切割或封闭)生物组织。系统100包括用于可控地供应em能量(例如,rf em能量和/或微波em能量)的发生器102。用于此目的的合适的发生器在以引用方式并入本文的wo 2012/076844中有所描述。发生器102通过接口电缆104连接到手持件106。手持件106也可被连接以从流体递送装置108(诸如注射器)接收流体供应107,但这不是必需的。如果需要,手持件106可容纳由致动器109操作的器械致动机构,例如拇指操作的滑块或柱塞。例如,器械致动机构可用于操作如本文所述的切除器器械的可枢转刀片元件。其他机构也可被包括在手持件中。例如,可提供用于在器械处部署针头的针头移动机构(可由手持件上的合适触发器操作)。手持件106的功能是将来自发生器102、流体递送装置108和器械致动机构的输入连同可能需要的任何其他输入组合到从手持件106的远侧端部延伸的单个柔性轴112中。手持件106可如在gb2567480中所述。
58.柔性轴112可插入穿过外科观测装置114的整个长度的器械(工作)通道。柔性轴112具有被成形为经过外科观测装置114的器械通道并在内窥镜的插入管的远侧端部突出(例如在患者体内)的器械尖端118。器械尖端118包括用于抓取生物组织的一对刀片元件和被布置成递送从发生器102输送的em能量(例如,rf em能量和/或微波em能量)的能量递送结构。任选地,器械尖端118还可包括用于递送从流体递送装置108输送的流体的可回缩皮
下注射针。手持件106包括用于打开和闭合器械尖端118的刀片元件的致动机构。手持件106还可包括用于相对于外科观测装置114的器械通道来旋转器械尖端118的旋转机构。
59.器械尖端118的结构可被布置成具有适合于经过工作通道的最大外径。通常,外科观测装置(诸如内窥镜)中的工作通道的直径小于4.0mm,例如为2.8mm、3.2mm、3.7mm、3.8mm中的任一者。柔性轴112可具有小于此的最大直径,例如2.65mm。柔性轴112的长度可等于或大于1.2m,例如2m或更大。在其他示例中,在柔性轴112已插入穿过工作通道插入之后(并且在器械绳被引入到患者体内之前),器械尖端118可被安装在轴的远侧端部处。可选地,柔性轴112可在进行其近侧连接之前从远侧端部插入到工作通道中。在这些布置中,可允许远侧端部组件118具有比外科观测装置114的工作通道更大的维度。上文描述的系统为将器械引入到患者体内的一种方式。其他技术是可能的。例如,还可使用导管插入器械。
60.尽管本文的示例是在外科观测装置的上下文中呈现的,但是应当理解的是,电外科切除器器械可为适合于开放式手术或与腹腔镜一起使用的装置的实施方案。
61.图2a-图2d为作为本发明的实施方案的电外科切除器器械的器械尖端200的不同视图。图2a为闭合位置中的器械尖端200的等轴视图,图2b为闭合位置中的器械尖端200的侧视图,图2c为打开位置中的器械尖端200的侧视图,并且图2d为打开位置中的器械尖端200的另一侧视图。器械尖端200被安装在柔性轴204的远侧端部处,所述柔性轴204可对应于上文讨论的柔性轴112。在实施方案中,器械尖端200包括承载第一电极206的静止部分202(例如,参见图2d)和承载第二电极214的可移动部分212(例如,参见图2d)。然而,本发明不必局限于这种配置。在其他示例中,两个电极都可设置在静止部分202或可移动部分212上。
62.静止部分202具有固定到柔性轴204的远侧端部的近侧区域。静止部分202远离柔性轴204的远侧端部在纵向方向上延伸。在其远侧端部处,静止部分202限定第一刀片元件205,所述第一刀片元件205为在其最远侧端部处具有直立齿210的纵向延伸的指状物。第一电极206沿第一刀片元件205的侧表面延伸。然而,在另一个实施方案中,第一电极206可替代地仅沿第一刀片元件205的上表面延伸。
63.可移动部分212可枢转地安装在静止部分202上。在实施方案中,可移动部分212包括第二刀片元件207(例如,参见图2d),所述第二刀片元件207为具有与第一刀片元件205相当的长度的细长指状物。第二刀片元件207在其最远侧端部处具有第一向下延伸的齿216。此外,第二刀片元件207具有沿第二刀片元件207的位于大致中间的第二向下延伸的齿217。
64.可移动部分能够围绕位于第一刀片元件205的近侧端部处的枢轴219(参见图2b和图2c)枢转,由此第二刀片元件207可在打开位置(在图2c和图2d示出)和闭合位置(在图2a和图2b示出)之间摆动,在打开位置中,所述第二刀片元件207远离第一刀片元件205成角度,在闭合位置中,所述第二刀片元件207和第一刀片元件205并排放置(即侧向相邻)。可移动部分的移动范围可这样允许第二刀片元件207采用相对于第一刀片元件205的锐角,例如约60度。这对于确保钳夹不会过度伸展,从而使得打开和闭合机构在钳夹的整个运动范围内保持平稳和一致是特别有用的。
65.第一刀片元件205和第二刀片元件207可因此限定剪式闭合机构,在剪式闭合机构中,当在打开位置中时,位于刀片元件205、207之间的间隙中的组织可随着第二刀片元件207移动到闭合位置而被施加压力。当第二刀片元件207移动到闭合位置时,第一刀片元件
205上的直立齿210和第二刀片元件207上的向下延伸的齿216、217用于将组织保持在间隙中。
66.第一刀片元件205包括例如由陶瓷或其他合适的电绝缘材料制成的平面介电体208。平面介电体208限定与第二刀片元件207枢转通过的平面平行的平面。平面介电体208在第一电极206和第二刀片元件207之间提供绝缘屏障。例如,第二刀片元件207被布置成滑动经过平面介电体208的第一表面,并且第一电极206形成在平面介电体208的第二表面上,第二表面位于平面介电体208的与第一表面相对侧。第一电极206可由表现出高导电性的导体例如金等制成。
67.第二电极214沿第二刀片元件207的侧表面延伸,当第二刀片元件207移动到闭合位置中时,侧表面滑动经过第一刀片元件205的相邻侧表面(即,上述平面介电体208的第一表面)。第二电极214沿可移动部分212的内部侧向面向表面延伸。第二刀片元件207和可移动部分212可由涂覆有绝缘材料的导电材料形成。例如,它可由具有陶瓷(例如氧化铝)、类金刚石碳(dlc)涂层、搪瓷涂层或硅基涂料涂层的不锈钢制成。接下来,材料可还涂有聚对二甲苯n,以便于封闭绝缘涂层。例如,聚对二甲苯n涂层可具有2微米至10微米之间,优选约3微米至7微米之间,更优选约5微米的厚度。聚对二甲苯n涂层渗透到绝缘体涂层的孔隙中,并有效地使其防水。反过来,这增加了绝缘涂层湿润时的击穿电压。绝缘涂层和聚对二甲苯n涂层可从不需要的区域移除,例如蚀刻掉。例如,第二电极214可通过从可移动部分212的内侧底部边缘蚀刻掉绝缘涂层和聚对二甲苯n涂层来形成。金层可沉积在蚀刻表面上以形成电极。如下所述,涂层的其他部分可被移除,以使得能够与同轴电缆的外导体形成电连接。
68.柔性轴204限定穿过其使得同轴电缆(未示出)延伸以用于输送em能量(例如,rf em能量和/或微波em能量)的内腔和用于控制可移动部分212的移动的纵向可滑动控制杆(如图2c所示)。
69.如参考图4更详细讨论的,第一电极206电连接到轴204内部的同轴电缆的内导体,并且第二电极214电连接到同轴电缆的外导体。因此,器械尖端提供了能够操作以递送em能量的能量递送结构。例如,rf能量可沿第一电极和第二电极之间的电流路径(例如,通过组织)递送,和/或微波能量可通过由第一电极和第二电极发射的微波场递送。
70.器械尖端200可提供三种操作模式。在第一模式中,器械可与闭合位置中的刀片元件205、207一起使用,以递送用于切穿生物组织的rf em能量。在第一形式中,rf em能量主要在邻近第一刀片元件205上的直立齿210和第二刀片元件207上的向下延伸的齿216的远侧切割区230中的第一电极206和第二电极214之间传送(例如,参见图2a)。因此,器械可用于扫过或滑过或穿过组织以实现切割。
71.在第二模式中,刀片元件205、207可用于执行抓取切割,即穿过在刀片元件之间捕获的组织的切割。在这种模式中,切割是通过借由闭合刀片元件205、207所施加的物理压力和闭合期间施加的rf em能量的组合来完成的。
72.在第三模式中,刀片元件205、207可用于抓持和封闭组织诸如血管等。在这种模式中,微波em能量被递送到建立用于凝结保持在刀片元件内的组织的微波场的电极。
73.静止部分202可具有安装在其外表面上的介电屏障。在这个示例中,介电屏障是热塑性聚合物,例如聚醚醚酮(peek)等。介电屏障可被模制在装置上,或者可为当刀片元件在
闭合位置中时可在器械尖端上方滑动的盖(例如通过激光切割合适尺寸的管形成)。介电屏障可用于控制第一电极206的形状,例如以确保第一电极206基本上仅暴露在第一刀片元件205的上表面处。反过来,这可确保从电极递送的em能量(例如,rf能量和/或微波能量)聚焦到期望区域。
74.现在将参照图2a至图2d来描述器械尖端200的打开和闭合操作。
75.图2c和图2d示出了在打开位置中的器械尖端200,其中可移动部分212被设置成使得第二刀片元件207与第一刀片元件205成锐角(例如60度)。如图2a最佳所见,静止部分202包括提供可移动部分212连接到其上的枢轴基座的纵向延伸的臂218。臂218具有可旋转地安装在其中的枢轴(未示出)。枢轴限定了侧向延伸的枢轴219(即,枢轴与由柔性轴204限定的纵向方向正交)。
76.支撑臂218形成在静止部分202上,以便于在静止部分202中限定狭槽。当可移动部分212在打开位置和闭合位置之间移动时,为了向可移动部分212的一部分(例如,近侧部分,诸如附接板222)提供相对于静止部分202移动的空间,狭槽可能是必要的。静止部分202和支撑臂218可形成轴204中的导体以及第二电极214之间的电连接部的一部分。例如,静止部分202(例如,支撑臂218)可由涂覆有绝缘体的导电材料形成,涂覆有绝缘体的导电材料还涂覆有聚对二甲苯n,并且可包括近侧接触部分,在近侧接触部分处,绝缘体涂层和聚对二甲苯n涂层被移除,并且近侧接触部分电连接到轴204中的导体。例如,聚对二甲苯n涂层可具有2微米至10微米之间,优选约3微米至7微米之间,更优选约5微米的厚度。如上所述,聚对二甲苯n涂层可用于改善防水性并增加绝缘涂层在潮湿条件下的击穿电压。为了便于产生覆盖静止部分202的所需区域且均匀的涂层,限制狭槽的某些维度使得涂层材料可渗透狭槽的所有内表面可能是有益的。因此,狭槽的长度(即与轴204的长度一致的维度)可以在1mm和3mm之间(优选小于2mm)。狭槽的宽度(即与枢轴219一致的维度)在0.2mm和1.2mm之间(优选大于0.7mm)。狭槽的深度可在0.2mm和1.2mm之间(优选大于0.6mm)。
77.可滑动控制杆220从柔性轴204突出。静止部分202具有形成在其中的控制杆220经过的导向通道(未示出)。控制杆220具有与可移动部分212接合的远侧附接特征部223。在示例中,远侧附接特征223为接合形成在可移动部分212的附接板222中的圆形孔口224的钩。可使用其他类型的接合。控制杆220的纵向滑动运动被转换成附接板222的枢转运动。附接板222可与第二刀片元件207一体形成或以其他方式可操作地耦接到所述第二刀片元件207。附接特征部223和孔口224可形成为使得附接特征223在孔口224中的纵向移动基本上被阻止。例如,控制杆直径可仅略小于孔口224的直径,使得附接特征部223可在孔口224内旋转,但是不能在孔口224内纵向移动。这样,控制杆的所有纵向移动都可转化为钳夹的移动。
78.图2a和图2b示出了闭合位置中的器械尖端200。从图2c和图2d的打开位置移动到图2a和图2b的闭合位置是通过例如经由手持件诸如图1的手持件106将控制杆220回缩到柔性套管204中来实现的。
79.图2a至图2d中还示出了器械尖端200的行程限制机构。行程限制机构操作以限制在打开位置和闭合位置中第二刀片元件207和第一刀片元件205之间的相对移动的最大程度。
80.如在图2b和图2c中最佳看到的,静止部分202和可移动部分212一起包括被布置成
提供行程限制机构的至少一对协作结构。第一对协作结构包括凸起突出部(或肩部)240和协作止动表面242。凸起突出部240形成在可移动部分212的顶表面上并且在可移动部分和静止部分之间的连接部的远侧(例如,枢轴219的远侧)。此外,止动表面242形成在静止部分202的顶表面上并且在可移动部分和静止部分之间的连接部的近侧。在一个实施方案中,止动表面242形成在静止部分202的支撑臂218的顶表面上。
81.如图2c所示,在使用中,凸起突出部240和止动表面242被配置成在打开位置中彼此邻接。这样,在打开位置中,第一对协作结构限制第二刀片元件207和第一刀片元件205之间的相对移动的最大程度。也就是说,第一对协作结构限制钳夹可打开的宽度。在一个实施方案中,第一对协作结构被配置成(例如,尺寸、形状、位置被设定成)将第一刀片元件和第二刀片元件之间的最大角度限定为约60度。应注意的是,在没有第一对协作结构的情况下,钳夹能够打开得更宽。因此,第一对协作结构可限制钳夹能够打开的宽度,以确保钳夹操作(例如移动)在整个允许的行程范围内是一致和可靠的。例如,在没有第一对协作结构的情况下,第二刀片元件的移动范围的极限可能变得不平稳,并且与移动范围的中间部分相比,可能在器械尖端上施加成比例的更大的应变。因此,通过限制第二刀片元件可旋转远离第一刀片元件的最大延伸,钳夹的整体移动可保持更加一致和可靠。此外,可能期望限制钳夹能够打开的程度,使得它们不会卡在或锁定在打开位置中。此外,可能期望限制钳夹能够打开的程度,使得器械尖端的整体轮廓可保持较小,这在狭小的空间或位置中可能是有益的。这些优点在精确的外科手术中尤其重要。
82.在所示的实施方案中,可移动部分包括凸起突出部,并且静止部分包括止动表面。然而,应当理解的是,在至少一些其他实施方案中,凸起突出部可位于静止部分上,并且止动表面可位于可移动部分上。此外,在一些其他实施方案中,第一对协作结构可包括两个凸起突出部,而不是凸起突出部和止动表面。
83.此外,行程限制机构可包括第二对协作结构,所述第二对协作结构包括一对邻接表面246和248。邻接表面246形成在可移动部分212的顶表面上并且在可移动部分212和静止部分202之间的连接部的近侧(例如,枢轴219的近侧)。邻接表面248形成在静止部分202的下表面上并且在可移动部分212和静止部分202之间的连接部的近侧。在一个实施方案中,邻接表面248形成在支撑臂218的下侧。
84.如图2b所示,在使用中,第二对协作结构被配置成在闭合位置中以平行形式彼此邻接。也就是说,在闭合位置中,邻接表面246基本上平行于邻接表面248并与所述邻接表面248接触。这样,可移动部分212和第二刀片元件207被防止进一步移动经过静止部分202和第一刀片元件205。因此,第二对协作结构在闭合位置限制了可移动部分212和第二刀片元件207相对于静止部分202和第一刀片元件205的相对位置。例如,第二对协作结构可被配置成(例如,尺寸、形状、位置被设定成)确保第二刀片元件207(例如,齿216和/或齿217)在闭合位置中不会在平面介电体208下方突出。例如,附接板222的维度(例如,长度或宽度)可被设定成限定闭合位置。注意,在没有第二对协作结构的情况下,第二刀片元件207可能能够在平面介电体208的底部表面下方突出(例如,考虑图2b所示的取向)。这可能是不期望的,因为它可能对位于器械尖端200的下侧的组织造成意外损伤。此外,如果第二刀片元件207能够枢转经过平面介电体208并位于所述平面介电体208下方,则钳夹的后续打开可能会无意中切割位于定位于可移动部分212的远侧尖端的顶表面和静止部分202的远侧尖端的底
部表面之间的任何组织。
85.图3a和图3b示出了用于将控制杆220连接到器械尖端200的机构。在图3a和图3b中,为了清楚起见,省略了轴204的外套管,使得下面的元件可见。应当理解的是,在形成图3a和图3b的布置之后,将添加外套管,如图2a至图2c所示。
86.在图3a和图3b中,器械尖端200的元件如上所述,并且示出了对应的附图标记。图3a和图3b示出了控制杆220如何从其与可移动部分212的连接部延伸到轴中。此外,静止部分202包括接收控制杆220的导向通道250。导向通道250的至少一部分可为基本上u形的,以容纳控制杆220。可看到同轴电缆248位于沿轴的长度的控制杆220的后面。如下面参考图6a和6b所解释的,控制杆220在导丝管(又称为第一管)252内沿轴204延伸。导丝管252确保控制杆220在轴204内平稳地移动(即,减少摩擦)。导丝管252的近侧端部终止于手持件(例如,图1的手持件106)处或位于手持件内部。导丝管252的远侧端部终止于静止部分202的近侧端部(即,刚好在近侧端部之前),如图3a和图3b所示。静止部分202的近侧端部区域254可具有大致圆形的横截面,并且与静止部分202的位于其远侧的特征部相比具有减小的宽度(例如直径)。同样,近侧端部区域254可包括一个或多个表面肋。由于导丝管252的远侧端部仅在静止部分202的近侧端部之前终止,因此导丝管252围绕控制杆220的大部分或全部,但不围绕控制杆220的远侧端部区域。控制杆220的远侧端部区域可为最终的4mm至8mm。
87.远侧导丝管(又称为第二管)256围绕控制杆220的远侧端部区域,但不围绕控制杆220的附接特征部223。附接特征部可占控制杆220的最远侧2mm或更小。此外,远侧导丝管256向近侧突出到导丝管252中,以限定导丝管252与远侧导丝管256重叠的重叠区域258。重叠区域258的长度可为远侧导丝管256的长度的约一半,例如,重叠区域250可为约4mm到6mm长,并且远侧导丝管256的长度可为约8mm到12mm。
88.基部短管(也称为第三管)260围绕重叠区域258和静止部分202的近侧端部区域254的近侧部分。基部短管260配合在近侧端部区域254周围,并且可通过摩擦接合保持在适当位置,所述摩擦接合通过前述肋增强。重叠区域258的长度可为基座短管260长度的约一半,并且基座短管260的近侧端部可以向近侧延伸超过重叠区域258的近侧端部。例如,重叠区域258可为约4mm到6mm长,并且基部短管260的长度可为约8mm到12mm。基部短管260然后结合到近侧端部区域254并且结合到导丝管252和远侧导丝管256两者。例如,结合可经由干涉配合和/或粘合剂。在一个实施方案中,三个管为透明的,并且它们使用紫外线粘合剂粘合在一起并粘合到近侧端部区域。近侧端部区域254上的前述肋特征部可有助于确保基部短管260保持附接到静止部分202。
89.因此,控制杆220在由导丝管252和远侧导丝管256形成的通道内自由滑动。这样,当控制杆220在轴204内展开和缩回以打开和闭合钳夹时,所述控制杆220不会阻碍或钩住任何特征部。此外,通道延伸穿过轴204和静止部分202之间的连接部,这意味着当控制杆220相对于静止部分202移动时也防止了阻碍和卡住。此外,基部短管260相对于器械尖端200固定通道,这意味着通道不能相对于器械尖端200移动。反过来,这确保了控制杆220的移动保持平稳和一致。
90.注意,作为最后的步骤,轴204的外套管被定位在基座短管206的顶部上,如图2a至图2c所示。外套管可通过粘合剂粘合在合适的位置中。在一个实施方案中,导丝管252和远侧导丝管256可由ptfe等形成。另一方面,基部短管可由聚醚嵌段酰胺(又称为peba、pebax
或热塑性弹性体)形成。
91.图4为作为本发明的实施方案的电外科切除器器械的器械尖端300的示意性局部剖开侧视图。器械尖端300位于柔性套管302的远侧端部处,所述柔性套管302输送同轴电缆304和控制杆312。控制杆312用于以与上述相同的方式控制可移动部分322相对于静止部分318的枢转运动。静止部分318具有例如通过合适的粘合剂固定到其上的平面介电体314,平面介电体314远离静止部分318在纵向方向上延伸以形成第一刀片元件。第一电极316形成在平面介电体314的一侧上。
92.可移动部分322在平面介电体314的与第一电极316相对的一侧经由枢轴(图4中不可见)可枢转地安装在静止部分318上。可移动部分322包括第二刀片元件,第二刀片元件被布置成以与上述第一刀片元件和第二刀片元件205、207类似的方式滑动经过第一刀片元件。可移动部分322包括其上的第二电极324,当刀片元件在闭合位置中时,所述第二电极324邻近平面介电体314的相对侧放置。
93.同轴电缆304包括通过介电材料308与外导体310分开的内导体306。介电材料308和内导体306延伸超过外导体310的远侧端部。介电材料308的远侧端部邻接平面介电体314的近侧端部。内导体306从接合处向远侧延伸,以与第一电极316的近侧部分重叠并电接触。本发明不必局限于这种布置。在其他示例中,例如,内导体电连接到可移动部分上的电极。
94.静态主体318包括支撑臂,可移动部分安装在支撑臂上。平面介电体314也可例如使用粘合剂等安装在支撑臂上。静止部分(例如支撑臂)由具有电绝缘涂层的导电材料(例如不锈钢)形成。如上所述,绝缘涂层可还涂有聚对二甲苯n,以便于改善防水性并增加绝缘涂层在潮湿条件下的击穿电压。涂层在电连接到同轴电缆304的外导体310的近侧接触部分320处被移除。可移动部分322也由具有电绝缘涂层的导电材料(例如不锈钢)形成。此外,绝缘涂层可还涂有聚对二甲苯n。可移动部分322在枢转连接部处与静止部分318物理接合。第二电极324以及同轴电缆304的外导体310之间的电连接部经过枢转连接部。例如,枢轴本身可由导电材料(例如不锈钢)形成。静止部分318的绝缘涂层和聚对二甲苯n涂层可在静止部分318和可移动部分322之间的滑动接合的区域(例如,用于接收枢轴的孔口或凹陷部)处被移除。类似地,可移动部分322的绝缘涂层和聚对二甲苯n涂层可在区域处被移除。由于第二电极324可为或可电连接到可移动部分322的导电材料,因此可形成至外导体的完整电连接部。
95.图5为图2d的复制,并将轴302示出为部分透明,以示出图4的示意性特征部可如何映射到图2a2d所示的装置上。与图4共同的特征被赋予相同的附图标记,并且不再对其进行描述。
96.图6a为器械轴612在朝向器械尖端行进时的剖面透视图。器械轴612包括外套管648,所述外套管648限定用于输送同轴电缆626和控制杆636的内腔。在示例中,同轴电缆626和控制杆636保持在纵向延伸的插入件650中。插入件650为例如由可变形聚合物诸如peek或具有类似机械属性的其他塑料形成的挤压件。如图6b中更清楚地示出,插入件650为具有围绕其外表面切去的一系列子内腔664的圆柱形元件。子内腔664穿透插入件650的外表面,以围绕其圆周限定多个离散脚662。子内腔664的尺寸被设定成输送部件诸如同轴电缆626或控制杆636,或者可用于允许流体沿套管648的内腔流动的目的。
97.插入件不包括任何封闭子内腔可能是有益的。如果存储在弯曲条件下,完全封闭
的子内腔可能易于保持变形。此类变形可引起使用过程中的不平稳运动。
98.插入件650可包括用于接收同轴电缆626的子内腔。在示例中,同轴电缆626包括通过介电材料656与外导体654分开的内导体658。外导体654可继而具有例如由ptfe或其他合适的低摩擦材料形成的保护盖或护套652,以允许当轴弯曲时的插入件和同轴电缆之间的相对纵向移动。
99.另一个子内腔可被布置成接收标准pfte管660,所述控制杆636延伸穿过所述标准pfte管660(其可为图3a和图3b的导丝管252)。在替代实施方案中,控制杆636可在使用前设置有低摩擦(例如pfte)涂层,使得不需要单独的pfte管。
100.当与同轴电缆626和控制杆636一起安装时,插入件被布置成进行填充,即紧贴地配合在套管648的内腔中。这意味着在轴612的弯曲和旋转过程中,插入件用于限制同轴电缆、控制杆和套管之间的相对移动。此外,通过填充套管648,插入件有助于防止套管在过度旋转的情况下塌陷和失去旋转。插入件优选由展现出抵抗此类移动的刚性的材料制成。
101.插入件的存在还可防止由器械轴612的变形引起的控制杆的“丢失”行程。
102.上文讨论的挤压插入件提供卡在套管内侧的凸轮状脚,并阻止控制杆围绕套管的轴缠绕。这将减少上面讨论的行程丢失。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
