1.本发明属于氢燃料电池汽车控制技术领域,尤其是涉及一种氢燃料电池新能源汽车的功率响应控制方法。
背景技术:
2.氢燃料电池作为发展前景广阔的动力电源,受到越来越多的国内外车企的青睐。氢能是一种绿色环保、来源多样的二次能源,随着制氢、输氢技术的不断突破,相信氢燃料电池新能源汽车会大规模出现在汽车消费市场上。
3.目前氢燃料电池新能源汽车技术不够成熟,氢燃料电堆系统工作时无法跟随工况切换功率请求,尤其是动力电池包等量不足,氢燃料电堆系统配合工作时,不能充分将氢燃料电池的优势发挥出来,使驱动电机工作状态一直保持在经济高效区间内。
技术实现要素:
4.有鉴于此,本发明旨在提出一种氢燃料电池新能源汽车的功率响应控制方法,以解决动力电池包等量不足,氢燃料电堆系统配合工作时,不能充分将氢燃料电池的优势发挥出来,使驱动电机工作状态一直保持在经济高效区间内的问题。
5.为达到上述目的,本发明的技术方案是这样实现的:
6.一种氢燃料电池新能源汽车的功率响应控制方法,包括以下步骤:
7.s1、根据驾驶员踩下加速踏板和制动踏板的深度值,获得当前加速踏板下对应的当前期望车速值v;
8.s2、获取车辆参数及当前道路坡度值,通过汽车行驶方程公式,计算出期望电机驱动扭矩tm;
9.s3、根据当前期望车速值v和车轮半径r,计算期望电机转速值n;
10.s4、根据期望电机驱动扭矩tm和期望电机转速值n,获得当前的电机效率,若当前电机效率低于设定值,且电机输出功率已达到电池包的最大输出功率,则根据电池包的最大输出功率获得最佳经济扭矩,并计算最佳经济扭矩与期望电机驱动扭矩的扭矩差值;
11.s5、根据期望电机转速值n和扭矩差值t
diff
获得功率差值,所述功率差值为氢燃料电堆的请求功率。
12.进一步的,获得当前加速踏板下对应的当前期望车速值v,具体方法为:根据驾驶员踩下加速踏板和制动踏板的深度值,通过期望车速map表获取当前加速踏板下对应的当前期望车速值v,
13.v=cur{加速深度,制动深度},v∈[0,120km/h]。
[0014]
进一步的,获取车辆参数及当前道路坡度值,通过汽车行驶方程公式,计算出期望电机驱动扭矩tm,具体公式如下:
[0015]
[0016]
其中,
[0017]
m为汽车质量;r为车轮半径;ig变速器传动比;i0主减速器传动比;η机械效率;f为滚动阻力系数;α为道路坡度(从坡度传感器获取);δ为汽车旋转质量换算系数;cd为风阻系数;a为迎风面积;v为当前期望车速值。
[0018]
进一步的,步骤s3中,根据当前期望车速值v和车轮半径r,计算期望电机转速值n,具体计算公式:
[0019][0020]
其中,
[0021]
ig变速器传动比;i0主减速器传动比。
[0022]
进一步的,步骤s4中,获得当前的电机效率,具体方法为:根据期望电机驱动扭矩tm和期望电机转速值n,根据驱动电机万有特性map表得出当前的电机效率,
[0023]
η
act
=cur{tm,n},η
act
∈[0,1];
[0024]
进一步的,步骤s4中,所述设定值为0.8。
[0025]
进一步的,步骤s4中,根据电池包的最大输出功率获得最佳经济扭矩,具体方法为:
[0026]
通过电池包的最大输出功率查最近经济扭矩map表格获得最佳经济扭矩t
eco
,
[0027]
t
eco
=cur{n},t
eco
∈[0,t
max
]
[0028]
最佳经济扭矩与期望电机驱动扭矩的差值t
diff
,具体计算公式为:
[0029]
t
diff
=tm t
eco
[0030]
其中,n为期望电机转速值。
[0031]
进一步的,根据期望电机转速值n和扭矩差值t
diff
获得功率差值p
diff
,具体计算公式如下:
[0032][0033]
另一方面,本技术提出应用上述的一种氢燃料电池新能源汽车的功率响应控制方法的一种氢燃料电池新能源汽车的功率响应控制系统,包括动力电池包、氢燃料电堆系统fcu、电源管理系统bms、整车控制器vcu、驱动电机、用于控制驱动电机的电机控制器,
[0034]
所述动力电池包与氢燃料电堆系统fcu均与电机控制器电性连接用于供电;
[0035]
所述电源管理系统bms与动力电池包连接,用于采集动力电池包的信息参数,所述动力电池包的信息参数包括单体电压、温度,电源管理系统bms、氢燃料电堆系统fcu、电机控制器均通过can线与整车控制器vcu连接用于通信;
[0036]
整车控制器vcu向氢燃料电堆系统发送功率请求信号,保证驱动电机运行在高效区间内,若电机的效率值小于0.8且电机的负载功率已达到动力电池包的最大输出功率时,整车控制器vcu启动氢燃料电堆系统使驱动电机处于高效区间,功率差值p
diff
作为氢燃料电池的请求功率。
[0037]
相对于现有技术,本发明所述的一种氢燃料电池新能源汽车的功率响应控制方法具有以下有益效果:
[0038]
本发明所述的一种氢燃料电池新能源汽车的功率响应控制方法,当氢燃料电池新
能源汽车运行过程中,驱动电机的效率值小于设定值且电机的负载功率已达到动力电池包的最大输出功率,通过启动氢燃料电堆系统来使驱动电机保持在高效区间之内,既保证车辆的动力性又实现经济性的要求。
附图说明
[0039]
构成本发明的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
[0040]
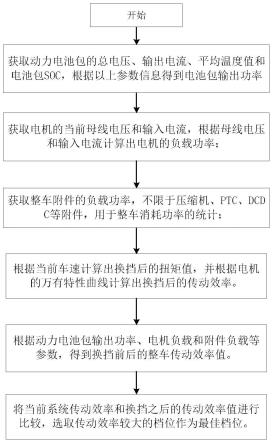
图1为本发明实施例所述的一种氢燃料电池新能源汽车的功率响应控制方法流程图;
[0041]
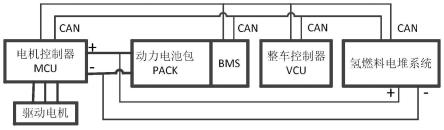
图2为本发明实施例所述的一种氢燃料电池新能源汽车的功率响应控制系统示意图。
具体实施方式
[0042]
需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
[0043]
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”等的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
[0044]
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本发明中的具体含义。
[0045]
下面将参考附图并结合实施例来详细说明本发明。
[0046]
一种氢燃料电池新能源汽车的功率响应控制方法,包括以下步骤:
[0047]
s1、根据驾驶员踩下加速踏板和制动踏板的深度值,获得当前加速踏板下对应的当前期望车速值v;
[0048]
s2、获取车辆参数及当前道路坡度值,通过汽车行驶方程公式,计算出期望电机驱动扭矩tm;
[0049]
s3、根据当前期望车速值v和车轮半径r,计算期望电机转速值n;
[0050]
s4、根据期望电机驱动扭矩tm和期望电机转速值n,获得当前的电机效率,若当前电机效率低于设定值,且电机输出功率已达到电池包的最大输出功率,则根据电池包的最大输出功率获得最佳经济扭矩,并计算最佳经济扭矩与期望电机驱动扭矩的扭矩差值;
[0051]
s5、根据期望电机转速值n和扭矩差值t
diff
获得功率差值,所述功率差值为氢燃料
电堆的请求功率。
[0052]
如图1所示,获得当前加速踏板下对应的当前期望车速值v,具体方法为:根据驾驶员踩下加速踏板和制动踏板的深度值,通过期望车速map表获取当前加速踏板下对应的当前期望车速值v,
[0053]
v=cur{加速深度,制动深度},v∈[0,120km/h]。
[0054]
如图1所示,获取车辆参数及当前道路坡度值,通过汽车行驶方程公式,计算出期望电机驱动扭矩tm,具体公式如下:
[0055][0056]
其中,
[0057]
m为汽车质量;r为车轮半径;ig变速器传动比;i0主减速器传动比;η机械效率;f为滚动阻力系数;α为道路坡度(从坡度传感器获取);δ为汽车旋转质量换算系数;cd为风阻系数;a为迎风面积;v为当前期望车速值。
[0058]
如图1所示,步骤s3中,根据当前期望车速值v和车轮半径r,计算期望电机转速值n,具体计算公式:
[0059][0060]
其中,
[0061]
ig变速器传动比;i0主减速器传动比。
[0062]
如图1所示,步骤s4中,获得当前的电机效率,具体方法为:根据期望电机驱动扭矩tm和期望电机转速值n,根据驱动电机万有特性map表得出当前的电机效率,
[0063]
η
act
=cur{tm,n},η
act
∈[0,1];
[0064]
如图1所示,步骤s4中,所述设定值为0.8。
[0065]
为保证驱动电机始终工作在高效区间内,若电机的效率值小于0.8且电机的负载功率已达到动力电池包的最大输出功率时,整车控制器vcu启动氢燃料电堆系统使驱动电机处于高效区间。
[0066]
如图1所示,步骤s4中,根据电池包的最大输出功率获得最佳经济扭矩,具体方法为:
[0067]
通过电池包的最大输出功率查最近经济扭矩map表格获得最佳经济扭矩t
eco
,
[0068]
t
eco
=cur{n},t
eco
∈[0,t
max
]
[0069]
最佳经济扭矩与期望电机驱动扭矩的差值t
diff
,具体计算公式为:
[0070]
t
diff
=tm t
eco
[0071]
其中,n为期望电机转速值。
[0072]
如图1所示,根据期望电机转速值n和扭矩差值t
diff
获得功率差值p
diff
,具体计算公式如下:
[0073][0074]
将功率差值p
diff
作为氢燃料电池的请求功率,能够满足驱动电机一直保持在高效
区间之内。
[0075]
如图2所示,应用上述所述的一种氢燃料电池新能源汽车的功率响应控制方法的一种氢燃料电池新能源汽车的功率响应控制系统,包括动力电池包、氢燃料电堆系统fcu、电源管理系统bms、整车控制器vcu、驱动电机、用于控制驱动电机的电机控制器,
[0076]
所述动力电池包与氢燃料电堆系统fcu均与电机控制器电性连接用于供电;
[0077]
所述电源管理系统bms与动力电池包连接,用于采集动力电池包的信息参数,所述动力电池包的信息参数包括单体电压、温度,电源管理系统bms、氢燃料电堆系统fcu、电机控制器均通过can线与整车控制器vcu连接用于通信;
[0078]
整车控制器vcu向氢燃料电堆系统发送功率请求信号,保证驱动电机运行在高效区间内,若电机的效率值小于0.8且电机的负载功率已达到动力电池包的最大输出功率时,整车控制器vcu启动氢燃料电堆系统使驱动电机处于高效区间,功率差值p
diff
作为氢燃料电池的请求功率。
[0079]
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。