1.本实用新型涉及一种螺蛳粉上料机器人。
背景技术:
2.螺蛳粉在广西飞快的发展着,特别是在柳州,已经作为了地域性的标志了。目前袋装螺蛳粉销售到全国各地,需求量很大,而现在很多螺蛳粉加工厂依然是人工装料包装,这就需要大量的人工,且人工机械的上料方式也容易产生疲劳,以至于容易出错。
技术实现要素:
3.本实用新型要解决的技术问题是:提供一种螺蛳粉上料机器人。
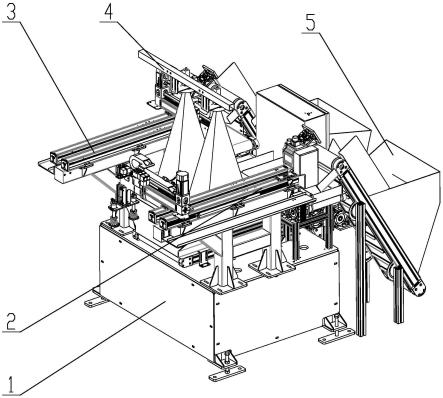
4.解决上述技术问题的技术方案是:一种螺蛳粉上料机器人,包括架子和上料机,上料机设置于架子上,上料机包括三轴机械手、传送带、过渡带、回流带、感应装置和物料放置桶,物料放置桶上的提升带上设有提升板,物料放置桶的出口位于过渡带的输入端的上方,过渡带的输出端位于传送带输入端的上方,传送带的输出端位于回流带端上方,三轴机械手分别位于传送带上方,上料机的数量为两个以上,上料机并列排置,上料机上的三轴机械手均处于排列位置,上料机前方设有传送链,传送链位于传送带的前方,传送链上设有多个放置槽。
5.本实用新型的进一步技术方案是:感应装置包括传感器、相机和光源,传感器设于传送带两侧,相机和光源分别设置于传送带上方。
6.上料机为设有双工位机械手的上料机。
7.上料机的数量为5-8个,该5-8个上料机上的三轴机械手均处于排列位置。
8.由于采用上述技术方案,本实用新型之一种螺蛳粉上料机器人,具有以下有益效果:
9.通过每个上料机上的三轴机械手分别抓取每种配料包放置于传送链上的放置槽中,以解决现有的通过人工将每种配料包放置于包装袋中的问题,提高了工作效率,也避免了人工的疲劳而容易出错的现象。
10.下面,结合说明书附图和具体实施例对本实用新型之一种螺蛳粉上料机器人的技术特征作进一步的说明。
附图说明
11.图1:一种螺蛳粉上料机器人的结构示意图。
12.图2:一种螺蛳粉上料机器人的结构示意图。
13.图3:一种螺蛳粉上料机器人的结构示意图。
14.图4:传送带的结构示意图。
15.图5:感应装置的结构示意图。
16.图6:三轴机械手的结构示意图。
17.图7:螺蛳粉上料机器人的使用状态示意图。
18.在上述附图中,各标号说明如下:
19.1-上料机,2-三轴机械手ⅰ,3-三轴机械手ⅱ,4-感应装置,5-物料放置桶,6-过渡带,7-传送带,8-回流带,9-传送链,10-放置槽,41-光源。
具体实施方式
20.一种螺蛳粉上料机器人,包括架子、上料机和传送链,上料机和传送链分别设置于架子上,传送链位于上料机前方,传送链上设有多个放置槽,上料机包括三轴机械手、传送带、过渡带、回流带、感应装置和物料放置桶,物料放置桶上的提升带上设有提升板,物料放置桶的出口位于过渡带的输入端的上方,过渡带的输出端位于传送带输入端的上方,传送带的输出端位于回流带端上方,三轴机械手分别位于传送带上方,上料机的数量为两个以上,上料机并列排置,上料机上的三轴机械手均处于排列位置,传送链位于传送带的前方。上料机为设有双工位机械手的上料机,一个主轨,一个副轨,当主轨速度赶不上时,副轨及时补料。如上料机包括上料机ⅰ和上料机ⅱ,上料机ⅰ和上料机ⅱ排列设置于架子上,上料机ⅰ上的三轴机械手ⅰ和上料机ⅱ上的三轴机械手ⅱ的轴向活动路线方向一致,三轴机械手ⅰ和三轴机械手ⅱ处于并排位置。即上料机ⅰ上的三轴机械手ⅰ和上料机ⅱ上的三轴机械手ⅱ上的相互对应的各轴的轴向相同,三轴机械手ⅰ和三轴机械手ⅱ的x轴滑台(电机驱动)、y轴滑台(电机驱动)和z轴气缸的轴向分别对应一致。感应装置包括传感器、相机和光源,传感器设于传送带两侧,相机和光源分别设置于传送带上方。相机和光源为现有的相机和光源组件。上料机的数量为5-8个,该5-8个上料机上的三轴机械手均处于排列位置。该5-8个上料机上的三轴机械手分别抓取每种配料包放置于传送链上的放置槽中。
21.人工倒对应物料到物料放置桶,通过提升带带动物料提升并初次分选,物料流入过渡带,然后流入处于视觉范围的传送带上;通过差速,使物料达到一个分拣排列。传送带上方设有2组对射传感器,物料输送到后,触发相机拍照,机械手抓取,若拍照效果ng的物料,则流入回流带上,人工重新倒入物料放置桶。当抓取完拍照区物料,对射传感器感应没物料,后端皮带继续输送物料,循环工作。
技术特征:
1.一种螺蛳粉上料机器人,其特征在于:包括架子和上料机,上料机设置于架子上,上料机包括三轴机械手、传送带、过渡带、回流带、感应装置和物料放置桶,物料放置桶上的提升带上设有提升板,物料放置桶的出口位于过渡带的输入端的上方,过渡带的输出端位于传送带输入端的上方,传送带的输出端位于回流带端上方,三轴机械手分别位于传送带上方,上料机的数量为两个以上,上料机并列排置,上料机上的三轴机械手均处于排列位置,上料机前方设有传送链,传送链位于传送带的前方,传送链上设有多个放置槽。2.根据权利要求1所述的螺蛳粉上料机器人,其特征在于:感应装置包括传感器、相机和光源,传感器设于传送带两侧,相机和光源分别设置于传送带上方。3.根据权利要求1所述的螺蛳粉上料机器人,其特征在于:上料机为设有双工位机械手的上料机。4.根据权利要求1所述的螺蛳粉上料机器人,其特征在于:上料机的数量为5-8个,该5-8个上料机上的三轴机械手均处于排列位置。
技术总结
本实用新型涉及一种螺蛳粉上料机器人,包括架子、上料机和传送链,上料机和传送链分别设置于架子上,传送链位于上料机前方,传送链上设有多个放置槽,上料机包括三轴机械手、传送带、过渡带、回流带、感应装置和物料放置桶,物料放置桶上的提升带上设有提升板,物料放置桶的出口位于过渡带的输入端的上方,过渡带的输出端位于传送带输入端的上方,传送带的输出端位于回流带端上方,三轴机械手分别位于传送带上方,上料机的数量为两个以上,上料机上的三轴机械手均处于排列位置,传送链位于传送带的前方。通过每个上料机上的三轴机械手分别抓取每种配料包放置于传送链上的同一个放置槽中。中。中。
技术研发人员:陈伟斌 黄龙光
受保护的技术使用者:广西美吉食品科技有限责任公司
技术研发日:2022.03.18
技术公布日:2022/7/14
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。