1.本公开内容涉及一种用于差速器系统中的锁定离合器和致动组件 的控制和诊断策略。
背景技术:
2.车辆差速器允许在桥间差速器(iads)的情况下在桥轴或驱动桥 之间有速度区别。这两种类型的差速器都利用了锁定装置来选择性地防止 在差速器中的速度区别,以当车辆经历低牵引力状况时增加车辆的牵引力。 锁定装置可在预期进入到低牵引力环境的行程中由车辆操作来激活。
3.博迪(boddy)的us 8,043,184 b2公开了一种差速器系统,具有 通过电磁体来致动的液压致动的锁定离合器。在离合器致动期间,电磁体 使用多阶段策略进行通电。在第一阶段的接合期间,递送到电磁体的电流 使离合器完全接合。在第二阶段中,稳定状态的电流维持离合器的接合。 具体地,当需要快速接合时,在第一阶段期间递送到电磁体的电流比随后 的保持阶段大。
4.本发明人已经认识到博迪(boddy)的用于锁定离合器激活的技 术以及其他锁定离合器接合策略的若干缺点。稳定状态离合器保持电流可 能高于维持离合器接合的需要。然而,先前的差速器系统关于确定离合器 的保持电流阈值方面可能存在困难。例如,对维持锁定离合器接合所需的 电流的大小建模可能是不准确的。这些不准确的情况可能导致离合器当期 望接合时打滑,或者使用过高的保持电流来维持离合器接合和避免离合器 打滑。因此,系统的能源效率可能下降。
5.为了克服上述挑战中的至少一些,提供了一种用于操作差速器中 的锁定离合器的方法。在一个示例中,该方法包括操作联接到差速器锁定 离合器(例如,iad锁定离合器)的离合器电动机,以将差速器锁定离合 器置于锁定构造中。该方法还包括,在差速器锁定离合器被置于锁定构造 中之后,以第一速率减少递送到离合器电动机的电力。该方法还要包括增 大递送到离合器电动机的电力。当基于来自电动机位置传感器的输出和/或 来自联接到差速器锁定离合器的一对轴的轴速传感器的输出而确定正在发 生离合器脱离时,电力增大。以这种方式,可以减少锁定离合器的保持力, 以提高致动效率并且更一般地提高传动系统效率。
6.在另一个示例中,当来自电动机位置传感器的输出指示离合器电 动机正在反向朝着初始离合器吻合点旋转时,递送到离合器电动机的电力 就增加。在这样的示例中,电动机位置传感器直接联接到离合器电动机。 以这种方式,电力可以减少,直到经由直接附接到电动机的传感器有把握 地确定离合器已经开始脱离为止。以这种方式,用于离合器接合的能量可 以保存,直到离合器开始释放。因此,电力可以周期性地减少和增加,将 离合器脱离作为电力减少和增加之间的拐点。
7.在另一个示例中,该方法包括,在递送到离合器电动机的电力增 加并且差速器锁定离合器处于锁定构造中之后,以第二速率减少递送到离 合器电动机的电力。在该示例
可以激活,以提醒车辆操作者或维护技术人员劣化的部件。
19.图1示意性地描述了具有传动系统的车辆,传动系统带有iad 和锁定离合器,设计成有效地保持在接合状态。图2示出了用于有效锁定 离合器接合的传动系统、致动组件和传感器布局的示例的详细说明。图3 描绘了在离合器接合期间致动器和电动机运行的示例性图形表示。
20.图4示出了用于有把握地诊断离合器和致动组件运行的诊断策 略。图5和图6示出了用于有效诊断离合器和致动组件劣化的用例iad诊 断策略。图7示出了用于将锁紧离合器有效保持为处于接合状态中的控制 策略。图8示出了用于提高离合器性同时维持离合器接合的用例iad锁定 策略。
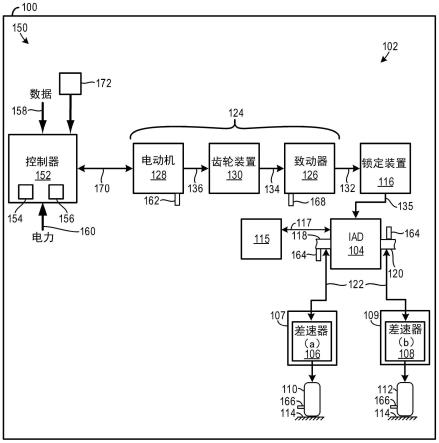
21.图1示出了具有传动系统102的车辆100的示意性描绘。传动系 统可包括iad 104。iad 104可以具有设计成用于将动力传递到车桥差速器 106、108的齿轮、轴、输入轭、壳体等。因此,例如,车桥差速器包括在 串列桥中,但是替代的车桥布局是可能的。反过来,车桥差速器106、108 将动力传递到在路面114上的驱动轮110、112。iad构造成允许在车桥差 速器106、108之间的速度区别,并且车桥差速器构造成允许在桥轴之间的 速度区别。可以使用具有侧齿轮、星形齿轮(spider gears)、小齿轮、行 星齿轮布置、这些的组合等来实现速度区别功能。车桥差速器106、108分 别包括在驱动桥107、109中。
22.移动动力源115,诸如内燃发动机、电动机-发电机、这些的组合, 可对iad 104提供动力或反之亦然,经由箭头117标示。诸如轭、齿轮等 合适的输入接口可以作为在iad和上游部件之间的机械连接,上游部件联 接到诸如驱动轴的动力源。因此,车辆100可以是混合动力车辆,其中电 动机-发电机和内燃发动机两者都用于动力产生。例如,在一个用例混合动 力车辆构造中,在特定状况期间,内燃发动机可以有助于对能量储存装置 再充电。与只采用发动机的车辆相比,混合动力车辆可提供更高的效率。 在另一种车辆构造中,内燃发动机可构造成仅对iad提供旋转能量。此外, 在其他示例中,车辆可以是其中省去内燃发动机的电池电动车辆(bev)。 在某些情况下,bev可能具有比仅包括内燃发动机的车辆有更大的维护间 隔,但行驶续航更差。
23.传动系统102还包括允许和阻止车桥差速器106、108之间的速 度区别的锁定装置116(例如,锁定离合器)。锁定装置116和iad 104 示意性地描绘为独立的部件,但可以理解的是,在实践中,锁定装置可以 形成在iad内,并且因此锁定装置可以集成在iad的封壳内。
24.为了实现速度区别的锁定/解锁功能,离合器可包括联接到iad 104中的轴118、120的摩擦板。然而,其他锁定装置和iad布置也在本公 开的范围内。此外,离合器可通过集成在iad内的润滑组件润滑。轴可以 旋转地联接到车桥差速器106、108,这经由箭头122表示。
25.差速器106、108还可包括允许和阻止对应车桥中的桥轴的速度 区别的锁定装置。例如,可以使用针对差速器106、108的电子和气动类型 的锁定装置。
26.传动系统102还包括致动组件124。致动组件的部件可以包括致 动器126(例如,滚珠坡道致动器)和离合器电动机128。离合器电动机128 可以包括用于产生旋转输出的常规部件,诸如转子、定子、壳体、轴承等。
27.在某些实施例中,齿轮布置130可以定位在致动器和离合器电 动机128之间。详细地说,齿轮布置130可以旋转地联接到离合器电动机 128和致动器126。箭头132标志着致动
器126和锁定装置116之间的机械 连接。详细地说,致动器中的板的线性位移可增加和减少联接到轴118、120 的、锁定离合器中的板的各组之间的摩擦接合。箭头134标志着齿轮布置 130和致动器126之间的机械连接(例如,旋转联接)。具体地,齿轮组件 中的齿轮可以与致动器中的致动板啮合。箭头136进一步标志着电动机128 和齿轮布置130之间的机械连接。这种机械连接可由彼此啮合的齿轮布置 的输入齿轮与电动机输出轴上的齿轮形成。此外,箭头135指示锁定装置 116与iad 104之间的机械连接。在某些情况下,锁定装置可以集成在iad 中。
28.齿轮布置130可以是行星型的齿轮减速器。使用行星齿轮减速器 允许提高致动器组件的空间效率。然而,当封装效率不那么受重视时,可 以使用非行星齿轮布局。如果希望的话,与放弃齿轮减速器的致动组件设 计相比,齿轮减速器使得能够使用较小的电动机来致动。齿轮减速器可进 一步构造成不可反向驱动或部分地可反向驱动的齿轮组。在其他实施例中, 可用在齿轮装置布置中的其他类型的不可反向驱动的齿轮包括蜗轮和摆线 齿轮。
29.具有控制器152的控制系统150还可以结合在车辆100中。控制 器152包括处理器154和存储器156。存储器156可以保持存储在其中的指 令,当由处理器执行时,这些指令使控制器152执行本文中描述的各种方 法、控制策略和诊断技术。处理器154可以包括微处理器单元和/或其他类 型的电路。存储器156可包括已知的数据存储介质,比如随机存取存储器、 只读存储器、保持活动(keep alive)存储器、其组合等。存储器156可以 包括非临时性存储器。
30.控制器152可以从定位在车辆100和传动系统102中的不同位置 中的传感器接收车辆数据和各种输出(例如,信号),经由箭头158表示。 箭头160标志着从能量储存装置、交流发电机等对控制器传输电能。传感 器可以包括电动机位置传感器162、轴位置传感器164(例如,轴速传感器)、 轮速传感器166、离合器位置传感器168等。控制器152还可以对电动机 128发送控制信号。例如,控制器152可以对电动机128发送信号,以调节 电动机的旋转速度和/或方向,经由箭头170表示。控制器152对诸如差速 器106、108的其他可控部件发送信号。替代地,控制器可以单独地控制电 动机。附加地或替代地,可以在车辆中提供车辆电子控制单元(ecu), 以控制其他可调节的部件,诸如发动机、电动机-发电机、能量储存装置等。 此外,控制系统150,并且特别是具有存储器156和处理器154的控制器 152可以构造成执行本文参考图4至8的控制和诊断技术。
31.车辆100可以包括输入装置172(例如,按钮、开关、触摸面板、 触摸界面等)。输入装置172,响应驾驶员的输入,可以生成指示iad锁 定装置的期望状态(例如,锁定或解锁状态)的模式请求。附加地或替代 地,考虑到车辆的运行状况,诸如车轮速度、车轮打滑和/或环境温度,可 以编程地启动iad锁定。在某些情况下,该输入装置可以定位在车辆座舱 (例如,车辆仪表盘)中。
32.图2示出了具有用于iad的致动组件202的传动系统200的示 例,iad诸如图1中描绘的iad 104。图2中示出的传动系统200是图1 中描绘的传动系统102的示例。因此,这些传动系统可共用通常的结构和 功能特征,并且因此省略多余的描述。
33.传动系统200还包括由致动组件202调节的锁定离合器(例如, 摩擦离合器),以204示意性地示出。具体地,滚珠坡道致动器206可以 在离合器中的板218上施加轴向力,以
启动各组离合器板之间的摩擦接合, 将离合器置于锁定构造中。相反地,可以释放轴向力,以将离合器置于解 锁构造中。当锁定时,离合器板和联接至其的轴一致地旋转,以防止接收 来自iad的动力的驱动桥之间出现速度区别。
34.滚珠坡道致动器206包括两块板208、210,并且滚珠212定位 在其间。板208、210可以包括其中驻留滚珠的沟槽。这些沟槽可以是成坡 道的,以改变滚珠相对于板的轴向位置。例如,板208在第一方向上的旋 转可将板210在方向214上推离板208,而板208在与第一方向相反的第二 方向上的旋转,使板210在方向216上轴向缩回。以这种方式,滚珠坡道 致动器206将旋转运动转换为启动离合器的接合和脱离的线性运动。因此, 线性运动在离合器接合时可以对离合器提供压缩力。离合器204中的板218 在离合器锁定和解锁操作期间可以摩擦地接合和脱离。弹簧,以219示意 性地示出,可以设置在离合器中,以便一旦由滚珠坡道致动器施加的压缩 力被释放就将板推开。
35.致动组件202还可以包括齿轮组220,该齿轮组在电动机222和 滚珠坡道致动器206之间提供齿轮减速。齿轮组220可以是行星齿轮组, 以实现紧凑的布置,如前所述,但是已经考虑到了非行星齿轮布置。
36.电动机222包括输出轴232,并且设计成在接合旋转方向233上 旋转该轴。相反,与接合旋转方向相反的第二旋转方向235,可称为脱离旋 转方向或向后旋转方向。为了完成旋转功能,电动机可以包括与定子、壳 体等机电地相互作用的转子。进一步可以理解的是,控制器226可以调节 从能量源223(例如,诸如电池的能量储存装置、交流发电机等)供应到电 动机的电力的量。
37.齿轮组220联接到电动机222,并且因此从其接收旋转输入。壳 体224可以封围电动机222、控制器226(例如,集成控制单元)和传感器 228、230。将电动机、控制器和传感器布置在共同的封壳中,能够使控制 和传感的延迟减小。因此,与使用远程定位的控制器、传感器和电动机的 传动系统相比,控制策略的性能可能提高。此外,将传感器和控制器结合 在电动机封壳内,允许实现车辆布线、故障模式、电磁干扰和校准维护的 减少。
38.联接到电动机输出轴232的传感器228可以是霍尔效应传感器、 电感位置传感器等。因此,传感器可以构造成检测电动机的旋转位置并且 特别是电动机的输出轴的旋转位置。因此,电动机的位置和速度可以使用 传感器228来确定。传感器230可以构造成检测滚珠坡道致动器206的轴 向位置,并且可以是光学传感器、电磁传感器等。因此,该传感器230可 以被称为离合器位置传感器。此外,如图2中所示,控制器226,特别是控 制器中的印刷电路板布置(pcba)234,可以将电动机位置传感器228结 合在其中,以进一步提高封装效率并且减少感应延迟。同样,传感器230 可以结合在pcba 234中。离合器位置传感器230可以允许直接的离合器 位置检测,而不依赖于通过电动机位置测量而得出的离合器位置,由此提 高系统的可靠性。
39.电源和通信接口236可以包括在控制器226中。电源和通信接 口236设计成用于有线和/或无线电子通信。车辆电子控制单元(ecu)可 以对/从控制器226发送和接收通信信号。以这种方式,不同的车辆控制单 元可以协配诊断和/或控制策略。在一个示例性方案中,通信接口236可以 接收命令以锁定或解锁离合器204。这样的命令可以由ecu编程地生成, 或者可以响应于操作者与输入装置的互动而生成。以这种方式,操作者当 期望时可以手动地接合和脱离iad锁定。再进一步在其他控制方案中,控 制器226可以自动地生成命令
以锁定和解锁离合器204。
40.图3描绘了曲线300,其中纵坐标为电动机扭矩,并且横坐标为 致动器(例如,滚珠坡道致动器)位移。虽然没有具体提供纵坐标和横坐 标的数值,但是电动机扭矩沿纵坐标在竖直方向上增加并且位移沿横坐标 在横向方向上增加。
41.在接合的第一阶段,电动机扭矩和位移对应地增加(例如,线性 增加),直到达到第一扭矩t1和位移d1为止。在第二阶段,位移增加而 扭矩保持不变。扭矩保持在t1,相对较低的值,直到达到位移d2并且离 合器板开始彼此接触为止。因此,在位移d2处,达到了离合器的初始接合 点302。这个最初的接合位置可以被称为吻合点。一旦离合器板开始彼此接 触,电动机所受的机械负载就会增加,因为离合器板压缩。当离合器板达 到锁定点时,这些板旋转联接附接到离合器的轴。因此,在第三阶段中, 位移从d2到d3增加,以及扭矩从t1到t2增加,直到离合器达到锁定点 304(例如,完全接合点)为止。在锁定构造中,离合器防止旋转地联接到 驱动桥的轴之间的速度区别。可以理解的是,电动机的位置可以与滚珠坡 道致动器的位移相关联。因此,吻合点处和完全接合点处的位移可以表示 为电动机位置值。
42.图4示出了用于操作传动系统的方法400。该方法400可经由上 文根据图1-2讨论的任何传动系统和部件来执行。然而,在其他示例中, 该方法400可以由其他合适的系统和部件来执行。此外,如先前所讨论的, 该方法400可以由包括处理器和存储器的控制器来实施。因此,该方法可 包括接收来自传感器的输入,并且对可控部件输出命令。
43.在402处,该方法包括:确定运行状况。可以例如传感器输入和 /或建模来确定运行状况。确定运行状况包括步骤404。在404处,该方法 包括:当达到离合器的初始接合点(例如,吻合点)时捕获电动机位置。 电动机速度可用于确定何时离合器达到其初始接合点。例如,当电动机速 度开始明显下降时,标志着电动机上的机械负荷上升。预先确定的电动机 速度导数可用于确定何时达到吻合点,但是已经设想了许多确定何时离合 器达到吻合点的技术。当确定已达到初始接合点时,电动机的位置被捕获。 在一个示例中,吻合点处的电动机位置可以被确定一次并且随后储存起来, 用于后续的诊断程序。以这种方式,可以节约计算资源,由此提高控制系 统的效率。替代地,在离合器的吻合点处的电动机位置可以多次捕获。
44.确定运行状况还包括步骤406,其中该方法包括:当达到离合器 的锁定点位置时捕获电动机位置。在一个示例中,电动机的失速水平可用 于确定何时离合器已经达到锁定点。例如,当电动机速度下降到阈值以下 或者接近零时,可以确定离合器已经达到其锁定点。在另一个示例中,联 接到离合器的轴的速度可以用来确定何时离合器达到锁定点。例如,当轴 的速度变得相等或者是在一个相对较小的范围内时,可以确定离合器处于 锁定位置中。当确定离合器的锁定位置,可以捕获电动机的位置。
45.此外,步骤404和406两者都可以在离合器接合期间进行。具体 地,步骤404可以在第一离合器接合事件期间进行,第一离合器接合事件 与其中实施步骤406的第二离合器接合事件不同。替代地,步骤404和406 两者都可以在共同的离合器接合事件期间实施。在408处,该方法包括: 捕获连续的电动机位置样本以确定在离合器接合期间的电动机速度。步骤 408可以在步骤404和/或406之外的另一个离合器接合事件期间进行。然 而,在替代示例中,可以在一个离合器接合事件期间捕获步骤404、406和 /或408中的电动机位置。离合
器接合事件可以限定为这样的序列,即,其 中,致动组件触发离合器中的板的锁定以防止速度区别,将离合器保持在 锁定位置中持续一段时间,并且随后释放离合器以再次允许速度区别。
46.在410处,该方法确定是否离合器已经劣化。可以基于在初始接 合点处的电动机位置和在锁定点处的电动机位置之间的差异来确定离合器 的劣化。例如,可以基于在制造时可确定的制造公差和其他设计参数来确 定阈值差异。此外,在某些示例中,可以考虑温度以使该阈值正常化。可 以理解的是,离合器的初始接合点(如吻合点)和完全接合点之间的差异 是离合器接合范围的测量方式。因此,接合范围的增加可能标志着离合器 的磨损和/或离合器没有如期望地作用。在某些示例中,诊断程序可以包括 多个阈值差异。第一阈值差异可对应于离合器组的磨损,而大于第一阈值 的第二阈值差异可对应于其中离合器致动机构没有如期望地作用的状况。 然而,如本文更详细地讨论的,电动机速度可用于诊断致动组件中的滚珠 坡道致动器和齿轮组。
47.如果确定离合器没有劣化(在410处为“否”),则该方法前进 到412。相反,如果确定离合器已经劣化(在410处为“是”),则该方法 移动到414。
48.在414处,该方法包括:生成离合器故障。离合器故障例如可由 集成到电动机封壳中的控制器生成并且发送到车辆ecu。响应于生成离合 器故障,该方法在415处可触发离合器故障指示器。离合器故障指示器的 示例包括诸如仪表盘灯的视觉指示器、用户界面上的图形、车辆座舱中的 音频提示、触觉提示、这些的组合等。具体地,离合器故障指示器和/或本 文所述的其他故障指示器可包括维护提示。以这种方式,车辆操作者可被 告知离合器的劣化状态,并且采取诸如维修车辆的纠正措施。
49.在412处,该方法包括:确定是否致动组件已经劣化。这一确定 可以考虑在离合器接合期间的电动机速度。例如,在吻合点到锁定点区段 的速度曲线或速度平均值可用于确定致动组件的劣化。还在其他的示例中, 当确定致动组件的劣化时,可以考虑开放点到吻合点区段的速度曲线或平 均值。在另一个示例中,如果在启动离合器接合后发生的电动机速度在预 定的时间内(例如,0.1秒(s)-1.0秒)或电动机旋转中没有下降,则齿轮 减速器组件或滚珠坡道致动器可以诊断为劣化(例如,未按预期操作)。 在又一个示例中,当电动机在预定的时间内或电机旋转的圈数内没有达到 阈值速度时,齿轮减速器组件或滚珠坡道致动器可以诊断为劣化。因此, 在离合器驱动期间,电动机速度的上升或下降可用于诊断致动组件。
50.如果确定致动器组件没有劣化(在412处为“否”),则该方法 结束。相反,如果确定致动组件劣化(在412处为“是”),则该方法移 动到416。在416处,该方法包括:生成致动组件故障。该故障可再次从集 成的电动机控制器传播到车辆ecu。该方法还包括在418处,响应于生成 致动器组件故障,激活致动器组件故障指示器。同样,该指示器可以是可 以包括在车辆舱内(例如,车辆仪表盘)中的视觉、听觉和/或触觉指示器。 在一个示例中,诊断程序可以单独地使用电动机位置传感器并且不使用离 合器位置传感器来捕获数据。这种数据收集策略允许诊断策略有效地执行 并且节约处理资源。诊断方法400允许离合器和/或上游致动装置有效且有 把握地诊断。诊断技术进一步使车辆操作者能够获得额外的车辆运行数据 并且采取行动提高iad性能,如果期望的话。
51.图5说明了用于传动系统,诸如图1-2所示的传动系统,的用例 锁定离合器诊断策
合点处和锁定点处的电动机位置以及电动机速度,以判断是否离合器或致 动组件已经劣化(例如,磨损或没有如期望地作用)。在离合器的保持控 制策略期间捕获诊断输入数据能够使控制器的处理资源得到保存,由此提 高处理效率。替代地,锁定离合器的诊断和控制策略可以在不同的时间(例 如,不同的离合器致动事件)进行,这可能降低控制系统的效率。
60.接下来在704处,该方法包括:以第一速率减少递送到离合器电 动机的电力。例如,控制器可以从用于离合器接合的初始电力传输水平上 减小递送到离合器电动机的电力。在一个示例中,当离合器被诊断为劣化 时,可以调节递送到离合器的电力的减小的速率。例如,当离合器被诊断 为劣化时,初始的动力递送减小速率可能降低。以这种方式,可以减少离 合器不适当地打滑的可能性,以提高离合器的性能。此外,在某些情况下, 如果切断电源(de-energizing)的水平或速率超出合理的范围(例如,超过 了保持离合器关闭的能量阈值),则可以设定诊断性故障。
61.在706处,该方法包括:确定是否离合器已经开始脱离。在一个 示例中,电动机位置传感器可用于进行离合器脱离的确定。例如,如果电 动机传感器指示电动机正从完全接合点反向朝吻合点旋转,则可确认离合 器脱离。在另一个示例中,附接到与锁定离合器中的板联接的轴的轴速传 感器可用于确定何时离合器开始脱离。在这样的示例中,当轴的速度开始 偏离当量值(equivalent value)时,可以确定的是离合器脱离已经开始。
62.如果确定离合器没有开始脱离(在706处为“否”),则该方法 移动到708。在708处,该方法包括:以第一速率维持对离合器电动机的电 力递送。相反,如果确定离合器已经开始脱离(在706处为“是”),则 方法前进到710。在710处,该方法包括:增大递送到离合器电动机的电力, 以重新接合离合器。例如,控制器可以操作以增加从电源(例如,能量储 存装置)传输的电力的量。
63.接下来在712处,该方法包括:以低于第一速率的第二速率减少 递送到离合器电动机的电力。同样,控制器可用于调节从电力源到离合器 电动机的电力流。以这种方式,传递到锁定离合器的电力速率可以反复降 低,以提高离合器接合的能量效率和减少离合器开始脱离的次数。
64.在714处,该方法再次确定是否锁定离合器已经开始脱离。电动 机速度或锁定离合器轴速可用于确定何时离合器脱离已经开始,与步骤706 类似。
65.如果确定没有开始锁定离合器脱离(在714处为“否”),则该 方法移动到716。在716处,该方法包括:以第二速率维持对离合器电动机 的电力递送。
66.相反,如果确定锁定离合器脱离已经开始(在714处为“是”), 则该方法移动到718,在该处方法包括:增大递送到离合器电动机的电力以 重新接合锁定离合器。
67.在720处,该方法包括:以低于第二速率的第三速率减少递送到 离合器电动机的电力。以这种方式,电力减小的速率可以再次降低,以减 少离合器到达脱离点的次数,以提高离合器的性能。
68.在722处,该方法确定是否解锁该锁定离合器。在一个示例中, 操作者的输入可被用来确定何时解锁和锁定该离合器。例如,操作者可以 致动按钮、开关或其他合适的输入装置,并且响应于与输入装置的互动, 控制器可生成离合器解锁命令。在其他情况下,离合器解锁命令可以基于 车辆牵引力、车辆速度、环境温度等状况编程地生成。如果确定锁定
离合 器应当解锁(在722处为“是”),则该方法移动到724,在该处方法包括: 操作离合器电动机以解锁该锁定离合器。例如,递送到电动机的电力可能 停止。相反,如果确定离合器不应当解锁(在722处为“否”),则该方 法前进到726。在726处,该方法包括:继续迭代降低减小递送到离合器电 动机的电力的速率的循环。在一个示例中,电力减小的速率可以迭代地减 小预定的值。替代地,电力减小的速率可以通过动态的值迭代地降低。该 动态的值可以基于系统运行状况来设立,系统运行状况诸如每个电力减小 迭代的持续时间、车辆速度、车辆牵引力等。
69.图8说明了用于传动系统,诸如图1-2所示的传动系统,的用例 锁定离合器控制策略的时序图800。在时序图的每一条曲线中,时间都在横 坐标上表示。曲线802和804的纵坐标分别表示锁定离合器命令和锁定离 合器构造。曲线806的纵坐标表示递送到离合器电动机的电力水平。
70.在t1处,控制器生成或接收锁定离合器接合命令。响应于接收 接合命令,在值p1处对电动机递送电力。因为离合器从t1到t2从解锁位 置移动到锁定位置,这种电力递送反过来开始启动离合器接合。当离合器 达到锁定位置时,递送到离合器的电力以第一速率808减小。递送到离合 器的电力以第一速率减少,直到离合器在t3处开始脱离为止。
71.响应于对离合器脱离的感测,在t3处增加递送到电动机的电力。 在t4处,离合器再次达到完全锁定位置。接下来,递送到离合器的电力以 低于第一速率的第二速率810减小,直到离合器在t5处开始再次脱离为止。 响应于离合器开始脱离,递送到电动机的电力再次增加。接下来,递送到 离合器的电力以低于第二速率的第三速率812减小,直到控制器在t7处接 收或生成离合器脱离指令为止。图8中示出的电动机电力的周期性下降(与 离合器致动力对应)使得离合器能够有效地保持在接合构造中。本文所述 的传感器布局允许迅速且有把握地建立离合器脱离点,以执行这种高效的 离合器保持策略。
72.还可以理解的是,离合器的锁定周期可以在概念上分为连续的阶 段,在这些阶段期间,递送到离合器的电力的速率反复降低。详细地说,t1 可以是第一阶段,t1和t2之间的时期可以是第二阶段,以此类推。
73.传动系统和iad锁定离合器控制技术的技术效果是在锁定操作 期间提高锁定离合器的能量效率。此外,当与包括与iad执行子系统空间 上远离的控制器的iad系统相比时,本文所述的iad控制系统减少了离合 器控制延迟并且减少了电磁干扰。
74.图1至2示出了带有各个部件的相对定位的示例构造。如果示出 为彼此直接接触或直接联接,则至少在一个示例中,这样的元件可以分别 称为直接接触或直接联接。类似地,至少在一个示例中,示出为彼此连续 或相邻的元件可以分别是彼此连续或彼此相邻的。作为示例,放置为彼此 共面地接触的组件可以称为共面地接触。作为另一示例,在至少一个示例 中,定位成彼此间隔开、其间仅具有间隔而没有其它部件的元件可以被如 此称呼。作为又一示例,彼此上/下、彼此相对侧或彼此左/右地示出的元件 可以相对于彼此如此称呼。此外,如附图中所示,在至少一个示例中,最 顶上的元件或元件的位置可称为部件的“顶部”,而最底下的元件或元件的 位置可称为部件的“底部”。如本文所使用的,顶部/底部、上部/下部、上方 /下方可以是相对于附图的竖直轴线并且用于描述附图中的元件相对于彼此 的定位。这样,在一个示例中,在其它元件上方示出的元件垂直地位于其 它元件上方。作为又一个示例,在附图中描绘的元件的形状可以被称为具 有如此形状(例如,诸如圆
形的、直线的、平面的、弯曲的、圆滑的、倒 角的、成角度的等)。此外,在一个示例中,彼此同轴的元件可以被如此 称呼。此外,在至少一个示例中,示出为彼此相交的元件可以被称为相交 元件或彼此相交。更进一步,在一个示例中,示出为在另一个元件内或在 另一个元件外的元件可以如此称呼。在其他示例中,彼此偏离的元件可以 如此称呼。
75.在以下段落中将进一步描述本发明。在一个方面中,提供了一种 方法,其包括:操作联接到差速器锁定离合器的离合器电动机,以将差速 器锁定离合器置于锁定构造中;在差速器锁定离合器被置于锁定构造中之 后,以第一速率减少递送到离合器电动机的电力;以及当基于来自电动机 位置传感器的输出或者来自联接到与差速器锁定离合器相连的一对轴的轴 速传感器的输出而确定正在发生离合器脱离时,增大递送到离合器电动机 的电力。在一个示例中,该方法还可以包括在递送到离合器电动机的电力 增加并且差速器锁定离合器处于锁定构造中之后,以第二速率减少递送到 离合器电动机的电力,其中第二速率小于第一速率。
76.在另一方面中,提供了一种传动系统,其包括:桥间差速器(iad) 锁定离合器,该iad锁定离合器构造成选择性地阻止第一驱动桥和第二驱 动桥之间的速度区别;致动组件,致动组件包括旋转地联接到致动器的离 合器电动机,其中致动器构造成接合和脱离iad锁定离合器;以及控制器, 控制器包括储存在存储器中的能由处理器执行的指令,当控制器接收或生 成离合器接合命令时,指令引起控制器:在iad锁定离合器被置于锁定构 造中之后,以第一速率减少输送到离合器电动机的电力;以及当基于来自离 合器电动机的转速或者联接到iad锁定离合器中的离合器板的轴的转速而 确定离合器脱离开始时,增大递送到离合器电动机的电力。
77.在又一方面中,提供了一种用于操作传动系统的方法,该方法包 括:在桥间差速器(iad)锁定离合器的锁定周期中,反复降低供应到与 iad锁定离合器联接的离合器电动机的电离降低的速率;其中:在锁定周 期的第一阶段中,通过对离合器电动机供应在预定范围内的电力,将iad 锁定离合器置于锁定构造中;在锁定周期的第二阶段中,供应到离合器电 动机的电力以第一速率降低。在一个示例中,该方法还可包括当通过控制 器生成或接收解锁iad锁定离合器的命令时,停止锁定周期。在另一个示 例中,该方法还可包括,在锁定周期的第三阶段中,增加供应到离合器电 动机的电力;以及在锁定周期的第四阶段中,以比第一速率慢的第二速率 来减小供应到离合器电动机的电力。
78.在另一方面中,提供了一种方法,其包括:根据离合器电动机的 初始接合位置和锁定点位置之间的差异来生成离合器故障,该差异在桥间 差速器(iad)锁定离合器联接到离合器电动机的接合期间发生;以及当生 成离合器故障时激活离合器故障指示器;其中,致动组件联接到离合器电 动机和iad锁定离合器。此外,在一个示例中,该方法还可以包括在生成 离合器故障之前,使用直接联接到离合器电动机的电动机位置传感器来捕 获锁定点位置。在又一个示例中,该方法还可以包括在生成离合器故障和 捕获锁定点位置之前,根据在iad锁定离合器接合期间使用电动机位置传 感器确定的电动机速度下降来确定锁定点位置。在另一个示例中,该方法 还可以包括根据在iad锁定离合器接合期间的离合器电动机的速度来生成 致动组件故障,并且当生成致动组件故障时激活致动组件故障指示器。在 另一个示例中,该方法还可以包括在生成致动组件故障之前,使用直接联 接到离合器电动机的电动机位置传感器来确定离合器电动机的速度。
79.在另一方面中,提供了一种传动系统,其包括:桥间差速器 (iad),该iad旋转地联接到第一驱动桥和第二驱动桥;iad锁定离合 器,该iad锁定离合器构造成选择性地阻止第一驱动桥和第二驱动桥之间 的速度区别;致动组件,该致动组件包括旋转联接到致动器的离合器电动 机,其中致动器构造成接合和脱离iad锁定离合器;以及控制器,该控制 器包括储存在存储器中的可由处理器执行的指令,在经由离合器电动机和 致动器来接合iad锁定离合器期间,指令引起控制器响应于离合器故障的 生成,根据离合器电动机的初始接合位置和锁定点位置之间的差异,触发 离合器故障指示器,该差异在iad锁定离合器联接到离合器电动机的接合 期间发生。
80.在又一方面中,提供了一种用于操作传动系统的方法,该方法包 括:提供了一种用于操作传动系统的方法,该方法包括:在通过离合器电 动机接合iad锁定离合器期间,根据经由联接到离合器电动机的电动机位 置传感器的电动机速度下降来确定离合器电动机的初始接合位置;使用电 动机位置传感器来捕获离合器电动机的锁定点位置;当初始接合位置和锁 定点位置之间的差异超过阈值时生成离合器故障;以及当生成离合器故障 时激活离合器故障指示器。在一个示例中,该方法还可以包括使用电动机 位置传感器来确定离合器电动机的速度;以及根据在iad锁定离合器接合 期间的离合器电动机的速度来生成致动组件故障,并且当生成致动组件故 障时激活致动组件故障指示器。
81.在任意方面或这些方面的组合中,当来自电动机位置传感器的输 出指示离合器电动机正在反向朝着初始离合器接合点旋转时,递送到离合 器电动机的电力可以增加,并且其中,电动机位置传感器可以直接联接到 离合器电动机。
82.在任意方面或这些方面的组合中,当来自轴速传感器的输出指示 轴速不相等时,递送到离合器电动机的电力可以增加。
83.在任意方面或这些方面的组合中,差速器锁定离合器可以是桥间 差速器(iad)锁定离合器。
84.在任意方面或这些方面的组合中,递送到离合器电动机的电力可 以基于来自轴速传感器的轴速来确定。
85.在任意方面或这些方面的组合中,递送到离合器电动机的电力可 以基于来自离合器位置传感器的离合器位置来确定。
86.在任意方面或这些方面的组合中,传动系统还可以包括:直接联 接到离合器电动机的电动机位置传感器,并且其中离合器电动机的旋转速 度可以基于来自电动机位置传感器的输出而确定。
87.在任意方面或这些方面的组合中,传动系统还可以包括:多个轴 速传感器,多个轴速传感器联接到与离合器板联接的轴,并且其中轴的旋 转速度可以通过来自多个轴速传感器的输出而确定。
88.在任意方面或这些方面的组合中,控制器可以包括储存在存储器 中的能由处理器执行的指令,在经由离合器电动机和致动器接合iad锁定 离合器期间,指令引起控制器:在递送到离合器电动机的电力增加并且差 速器锁定离合器处于锁定构造中之后,以第二速率减少递送到离合器电动 机的电力,其中第二速率小于第一速率。
89.在任意方面或这些方面的组合中,传动系统还可以包括:联接到 离合器电动机和致动器的齿轮减速器。
90.在任意方面或这些方面的组合中,齿轮减速器不可反向驱动。
91.在任意方面或这些方面的组合中,控制器可以布置在离合器电动 机的壳体中。
92.在任意方面或这些方面的组合中,致动器可以是滚珠坡道致动 器。
93.在任意方面或这些方面的组合中,可以响应于在控制器处接收或 生成锁定iad锁定离合器的命令而启动锁定周期。
94.在任意方面或这些方面的组合中,电力的减小速率可以迭代地减 小预定的值。
95.在任意方面或这些方面的组合中,电动机速度的下降可以在第一 iad锁定离合器致动事件期间检测到,该事件与当检测到锁定点位置时发 生的第二iad锁定离合器致动事件不同。
96.在任意方面或这些方面的组合中,当连接到iad锁紧离合器的 两根轴开始以相同的速度旋转时,锁定点位置可由直接联接到离合器电动 机的电动机位置传感器捕获。
97.在任意方面或这些方面的组合中,当离合器电动机达到失速速度 时,锁定点位置可由直接联接到离合器电动机的电动机位置传感器捕获。
98.在任意方面或这些方面的组合中,故障指示器可以是故障标志, 并且该方法还包括响应于故障标志的激活而生成服务提示。
99.在任意方面或这些方面的组合中,传动系统还可以包括:直接联 接到离合器电动机的电动机位置传感器。
100.在任意方面或这些方面的组合中,控制器还可以包括:储存在 存储器中的可由处理器执行的指令,在第一离合器致动事件期间,该指令 引起控制器:根据在iad锁定离合器接合期间的电动机速度的下降来确定 初始接合位置;以及储存在存储器中的可由处理器执行的指令,在第二离 合器致动事件期间,该指令引起控制器:进行上文所述的另一项活动。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。