1.本实用新型涉及一种带有行星轮机构的转向臂轴,用于汽车电动助力转向器。
背景技术:
2.目前的汽车电动助力转向器,电机助力需通过螺杆、螺母、钢球、轴承并通过转向臂轴上的齿扇来传递,齿扇同时还要传递来自方向盘的操作力。
3.这种形式的电动助力转向器,当使用在中型及重型车上时,上述零件将承受非常大的载荷,从而导致转向器体积及自重都将过大,进而导致成本增加,整车布置难度加大。
技术实现要素:
4.本实用新型的目的在于提供一种带有行星轮机构的转向臂轴,其将上述两种力的传递路线分开,来自方向盘的操作力仍然通过齿扇传递,而来自于电机的助力则通过与转向臂轴集成在一起的行星轮机构传递。仍然保留了传统的循环球转向器,但是转向臂轴的齿扇只传递来自于方向盘的操作力,而不传递来自于电机的助力,因此螺杆、螺母、钢球和轴承不再承受过大的载荷;在转向臂轴上集成了行星轮机构,用来传递来自于电机的助力,而集成了行星轮机构的转向臂轴具有承载能力大、效率高、结构紧凑等优点。
5.本实用新型的技术方案是这样实现的:一种带有行星轮机构的转向臂轴,由转向臂轴,内齿圈,副行星架,行星轮及太阳轮组成;其特征在于:转向臂轴与副行星架焊接在一起,共同组成行星轮机构的行星架a;转向臂轴两端分别由左滚柱轴承和右滚柱轴承径向支撑,左滚柱轴承外圈与壳体过盈压装在一起;右滚柱轴承外圈与壳体过盈压装在一起;行星轮内孔与滚针轴承外圈过盈压装在一起;行星轮装入转向臂轴与副行星架焊接在一起后形成的行星架a上;垫片装配在行星轮的两侧;销轴穿过垫片及滚针轴承,过盈压入行星架a;
6.内齿圈通过螺栓与壳体固定在一起;太阳轮一端通过轴承与壳体固定在一起,另一端与滚针轴承内孔配合。
7.所述的转向臂轴为一体式或分体式。
8.本实用新型的积极效果是与行星轮机构集成在一起的转向臂轴,该转向臂轴的齿扇只传递来自于方向盘的操作力,而来自于电机的助力则由行星轮机构传递;具有承载能力大、效率高、结构紧凑等优点。
附图说明
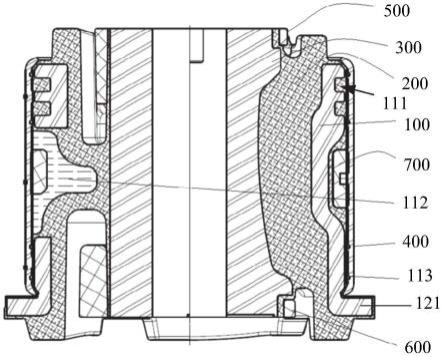
9.图1是本实用新型一种带有行星轮机构的转向臂轴的剖视图。
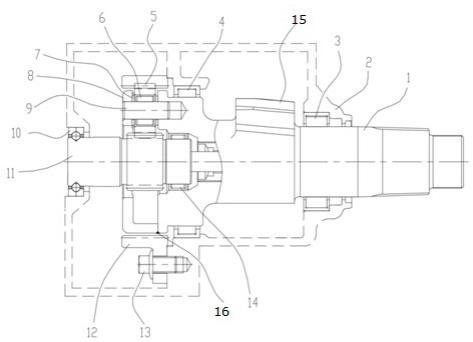
10.图2是本实用新型一种带有行星机轮构的转向臂轴的轴测图。
11.图3是本实用新型的花键连接的转向臂轴示意图。
12.图4是本实用新型的焊接的分体式转向臂轴的示意图。
13.图5是本实用新型的另一种焊接的分体式转向臂轴的示意图。
具体实施方式
14.下面结合附图对本实用新型做进一步的描述:如图1-2所示,一种带有行星轮机构的转向臂轴,由转向臂轴1,内齿圈12,副行星架8,行星轮5及太阳轮11组成;其特征在于:转向臂轴1与副行星架8焊接在一起,共同组成行星轮机构的行星架a;转向臂轴1两端分别由左滚柱轴承3和右滚柱轴承4径向支撑,左滚柱轴承3外圈与壳体2过盈压装在一起;右滚柱轴承4外圈与壳体2过盈压装在一起;行星轮5内孔与滚针轴承6外圈过盈压装在一起;行星轮5装入转向臂轴1与副行星架8焊接在一起后形成的行星架a上;垫片7装配在行星轮5的两侧;销轴9穿过垫片7及滚针轴承6,过盈压入行星架a;
15.内齿圈12通过螺栓13与壳体2固定在一起;太阳轮11一端通过轴承10与壳体2固定在一起,另一端与滚针轴承内孔14配合。
16.来自于电机的助力通过其他零部件传递至太阳轮11,当太阳轮11转动时,会带动与其啮合的行星轮5转动,而与行星轮5啮合的内齿圈2是通过螺栓13固定在壳体2上的,因此行星轮5此时既自转又绕太阳轮11轴线公转,行星轮5的公转通过销轴9带动行星架a转动,因此转向臂轴1也将随之转动并通过其输出端花键输出助力。
17.如图1所示,来自于方向盘的操作力,通过转向臂轴1上的齿扇15传递给转向臂轴1,来自于电机助力由太阳轮11输入,经由与转向臂轴1集成在一起的行星轮机构,即行星轮5通过销轴9带动行星架a转动,最终传递至转向臂轴1的输出端花键。
18.如图3所示,转向臂轴1为分体式,转向臂轴1分为两段,b1与b2。b1与b2通过花键17连接并焊接16在一起,之后再与副行星架8焊接在一起,共同组成行星轮机构的行星架a。
19.转向臂轴1两端分别由左滚柱轴承3和右滚柱轴承4径向支撑。左滚柱轴承3外圈与壳体2过盈压装在一起;右滚柱轴承4外圈与壳体2过盈压装在一起。
20.行星轮5内孔与滚针轴承6外圈过盈压装在一起;行星轮5装入转向臂轴1与副行星架8焊接在一起后形成的行星架a上;垫片7装配在行星轮5的两侧;销轴9穿过垫片7及滚针轴承6,过盈压入行星架a。
21.内齿圈12通过螺栓13与壳体2固定在一起。
22.转向臂轴1与滚针轴承14外圈过盈压装在一起;太阳轮11一端通过轴承10与壳体2固定在一起,另一端与滚针轴承内孔14配合。
23.来自于电机的助力通过其他零部件传递至太阳轮11,当太阳轮11转动时,会带动与其啮合的行星轮5转动,而与行星轮5啮合的内齿圈2是通过螺栓13固定在壳体2上的,因此行星轮5此时既自转又绕太阳轮11轴线公转,行星轮5的公转通过销轴9带动行星架a转动,因此转向臂轴1也将随之转动并通过其输出端花键输出助力。
24.如图1所示,来自于方向盘的操作力,通过转向臂轴1上的齿扇15传递给转向臂轴1,来自于电机助力由太阳轮11输入,经由与转向臂轴1集成在一起的行星轮机构,即行星轮5通过销轴9带动行星架a转动,最终传递至转向臂轴1的输出端花键。
25.如图4所示转向臂轴1为分体式,转向臂轴1分为两段,b3与b4。b3与b4通过过盈连接并焊接在一起,之后再与副行星架8焊接在一起,共同组成行星轮机构的行星架a。
26.转向臂轴1两端分别由左滚柱轴承3和右滚柱轴承4径向支撑。左滚柱轴承3外圈与壳体2过盈压装在一起;右滚柱轴承4外圈与壳体2过盈压装在一起。
27.行星轮5内孔与滚针轴承6外圈过盈压装在一起;行星轮5装入转向臂轴1与副行星
架8焊接在一起后形成的行星架上;垫片7装配在行星轮5的两侧;销轴9穿过垫片7及滚针轴承6,过盈压入行星架a。
28.内齿圈12通过螺栓13与壳体2固定在一起。
29.转向臂轴1与滚针轴承14外圈过盈压装在一起;太阳轮11一端通过轴承10与壳体2固定在一起,另一端与滚针轴承内孔14配合。
30.来自于电机的助力通过其他零部件传递至太阳轮11,当太阳轮11转动时,会带动与其啮合的行星轮5转动,而与行星轮5啮合的内齿圈2是通过螺栓13固定在壳体2上的,因此行星轮5此时既自转又绕太阳轮11轴线公转,行星轮5的公转通过销轴9带动行星架a转动,因此转向臂轴1也将随之转动并通过其输出端花键输出助力。
31.如图1所示,来自于方向盘的操作力,通过转向臂轴1上的齿扇15传递给转向臂轴1,来自于电机助力由太阳轮11输入,经由与转向臂轴1集成在一起的行星轮机构,即行星轮5通过销轴9带动行星架a转动,最终传递至转向臂轴1的输出端花键。
32.如图5所示转向臂轴1为分体式,转向臂轴1分为两段,b5与b6。b5与b6通过过盈连接并焊接16在一起,之后再与副行星架8焊接在一起,共同组成行星轮机构的行星架a。
33.转向臂轴1两端分别由左滚柱轴承3和右滚柱轴承4径向支撑。左滚柱轴承3外圈与壳体2过盈压装在一起;右滚柱轴承4外圈与壳体2过盈压装在一起。
34.行星轮5内孔与滚针轴承6外圈过盈压装在一起;行星轮5装入转向臂轴1与副行星架8焊接在一起后形成的行星架上;垫片7装配在行星轮5的两侧;销轴9穿过垫片7及滚针轴承6,过盈压入行星架a。
35.内齿圈12通过螺栓13与壳体2固定在一起。
36.转向臂轴1与滚针轴承14外圈过盈压装在一起;太阳轮11一端通过轴承10与壳体2固定在一起,另一端与滚针轴承内孔14配合。
37.来自于电机的助力通过其他零部件传递至太阳轮11,当太阳轮11转动时,会带动与其啮合的行星轮5转动,而与行星轮5啮合的内齿圈2是通过螺栓13固定在壳体2上的,因此行星轮5此时既自转又绕太阳轮11轴线公转,行星轮5的公转通过销轴9带动行星架a转动,因此转向臂轴1也将随之转动并通过其输出端花键输出助力。
38.如图1所示,来自于方向盘的操作力,通过转向臂轴1上的齿扇15传递给转向臂轴1,来自于电机助力由太阳轮11输入,经由与转向臂轴1集成在一起的行星轮机构,即行星轮5通过销轴9带动行星架a转动,最终传递至转向臂轴1的输出端花键。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。