1.本发明涉及振动整流误差校正装置及方法、传感器模块。
背景技术:
2.专利文献1中记载了一种传感器模块,其构成为:使第一低通滤波器与物理量传感器的输出信号同步地进行动作,并通过后级的第二低通滤波器进行与基准时钟同步的重采样。根据该传感器模块,在低通滤波器整体的输入输出中产生非线性特性,并将该非线性特性引起的振动整流误差调整为与通过物理量传感器的悬臂谐振产生的振动整流误差呈相反相位,由此能够抵消彼此的振动整流误差,降低最终输出中出现的振动整流误差。
3.专利文献1:日本特开2019-190897号公报
4.在专利文献1记载的传感器模块中,由于是通过对第一低通滤波器的群延迟量进行调整来对由低通滤波器整体的输入输出的非线性特性引起的振动整流误差进行校正,因此,调整后的低通滤波器整体的群延迟量会根据物理量传感器的特性而变化。
技术实现要素:
5.本发明涉及的振动整流误差校正装置的一方式具备:
6.基准信号产生电路,输出基准信号;
7.第一频率δσ调制电路,使用第一被测定信号对所述基准信号进行频率δσ调制,生成第一频率δσ调制信号;
8.第一滤波器;
9.第二滤波器,与所述基准信号同步地进行动作;以及
10.第一定时控制电路,根据所述基准信号的脉冲数的计数值生成使所述第一被测定信号延迟后的第一定时信号,并与所述第一定时信号同步地控制输出被输入的信号的定时,
11.所述第一滤波器及所述第一定时控制电路设置于从所述第一频率δσ调制电路的输出开始至所述第二滤波器的输入为止的信号路径。
12.本发明涉及的传感器模块的一方式具备:
13.所述振动整流误差校正装置的一方式;以及
14.物理量传感器,
15.所述第一被测定信号是基于所述物理量传感器的输出信号的信号。
16.本发明涉及的传感器模块的另一方式具备:
17.所述振动整流误差校正装置的一方式;
18.第一物理量传感器;以及
19.第二物理量传感器,
20.所述第一被测定信号是基于所述第一物理量传感器的输出信号的信号,
21.所述第二被测定信号是基于所述第二物理量传感器的输出信号的信号。
22.本发明涉及的振动整流误差校正方法的一方式包括如下工序:
23.使用被测定信号对基准信号进行频率δσ调制,生成频率δσ调制信号;
24.根据所述基准信号的脉冲数的计数值生成使所述被测定信号延迟后的定时信号,并与所述定时信号同步地控制输出基于所述频率δσ调制信号的信号的定时;
25.与所述定时信号同步地对基于被控制了所述定时的所述信号的信号进行第一滤波处理;以及
26.与所述基准信号同步地对基于通过所述第一滤波处理得到的信号的信号进行第二滤波处理。
27.本发明涉及的振动整流误差校正方法的另一方式包括如下工序:
28.使用被测定信号对基准信号进行频率δσ调制,生成频率δσ调制信号;
29.与所述被测定信号同步地对基于所述频率δσ调制信号的信号进行第一滤波处理;
30.根据所述基准信号的脉冲数的计数值生成使所述被测定信号延迟后的定时信号,并与所述定时信号同步地控制输出基于通过所述第一滤波处理得到的信号的信号的定时;以及
31.与所述基准信号同步地对基于被控制了所述定时的所述信号的信号进行第二滤波处理。
附图说明
32.图1是传感器模块的立体图。
33.图2是传感器模块的分解立体图。
34.图3是物理量传感器的立体图。
35.图4是物理量传感器的俯视图。
36.图5是图4的p1-p1线处的剖视图。
37.图6是物理量传感器的动作的说明图。
38.图7是物理量传感器的动作的说明图。
39.图8是传感器模块的功能框图。
40.图9是从原理上说明因为输出波形畸变产生振动整流误差的情况的图。
41.图10是表示施加的加速度与倒数计数值的非线性特性的图。
42.图11是表示施加的加速度与物理量传感器的振荡频率的非线性特性的图。
43.图12是表示物理量传感器的振荡频率与倒数计数值的非线性特性的图。
44.图13是表示频率比测定电路的构成例的图。
45.图14是表示第一低通滤波器的构成例的图。
46.图15是表示第二低通滤波器的构成例的图。
47.图16是用于说明能够调整由频率比测定电路的输入输出的非线性特性引起的振动整流误差的情况的图。
48.图17是表示测定值中包含的振动整流误差相对于抽头数的依赖性的图。
49.图18是表示频率比测定电路的构成例的图。
50.图19是表示第一低通滤波器的构成例的图。
51.图20是向fifo寄存器输入输出的计数值的时序图。
52.图21是用于说明能够调整由频率比测定电路的输入输出的非线性特性引起的振动整流误差的情况的图。
53.图22是表示改良后的频率比测定电路的构成例的图。
54.图23是表示定时控制电路的构成例的图。
55.图24是定时控制电路的动作时的各种信号的时序图。
56.图25是表示图13的构成的频率比测定电路的测定结果的图。
57.图26是表示图22的构成的频率比测定电路的测定结果的图。
58.图27是表示改良后的频率比测定电路的其他的构成例的图。
59.图28是表示定时控制电路的其他的构成例的图。
60.图29是表示振动整流误差校正方法的步骤的一个例子的流程图。
61.图30是表示振动整流误差校正方法的步骤的另一个例子的流程图。
62.图31是表示第二实施方式中的频率比测定电路的构成例的图。
63.图32是表示第二实施方式中的频率比测定电路的另一构成例的图。
64.图33是表示第二实施方式中的振动整流误差校正方法的步骤的一个例子的流程图。
65.图34是表示第二实施方式中的振动整流误差校正方法的步骤的另一个例子的流程图。
66.图35是表示第三实施方式中的频率比测定电路的构成例的图。
67.图36是表示第三实施方式中的频率比测定电路的另一构成例的图。
68.图37是表示第三实施方式中的振动整流误差校正方法的步骤的一个例子的流程图。
69.图38是表示第三实施方式中的振动整流误差校正方法的步骤的另一个例子的流程图。
70.图39是表示第四实施方式中的振动整流误差校正方法的步骤的一个例子的流程图。
71.附图标记说明
[0072]1…
传感器模块;2
…
振动整流误差校正装置;3
…
处理装置;5
…
基板部;10
…
基部;12
…
连接部;13
…
可动部;30a、30b
…
支撑部;34
…
封装件接合部;36a、36b
…
接合部;38a、38b
…
延伸部;40
…
物理量检测元件;50、52、54、56
…
配重;62
…
接合部件;101
…
容器;102
…
盖;103
…
螺纹孔;104
…
固定突起;111
…
侧壁;112
…
底壁;115
…
电路基板;115f
…
第一面;115r
…
第二面;116
…
连接器;121
…
开口部;122
…
内表面;123
…
开口面;125
…
第二基座;127
…
第一基座;129
…
突起;130
…
固定部件;133、134
…
缩颈部;141
…
密封部件;172
…
螺钉;174
…
内螺纹;176
…
贯通孔;200、200x、200y、200z
…
物理量传感器;201x、201y、201z
…
振荡电路;202、202x、202y、202z
…
频率比测定电路;203
…
基准信号产生电路;210
…
微控制单元;220
…
存储部;230
…
接口电路;300
…
频率δσ调制电路;301
…
计数器;302
…
锁存电路;303
…
锁存电路;304
…
减法器;310
…
第一低通滤波器;311
…
延迟元件;312
…
积分器;313
…
积分器;314
…
抽取器;315
…
延迟元件;316
…
微分器;317
…
延迟元件;318
…
微分器;320
…
锁存电路;321
…
锁存电路;330
…
第二低通滤波器;331
…
积分器;332
…
延迟元件;
333
…
微分器;334
…
抽取器;340
…
fifo寄存器;350
…
定时控制电路;350-1
…
第一定时控制电路;350-2
…
第二定时控制电路;351
…
锁存电路;352
…
计数器;353
…
双端口ram;354
…
输出定时生成电路;355
…
计数器;356
…
缓冲电路;360
…
第三低通滤波器;371
…
乘法器;372
…
乘法器;373
…
加法器;374
…
延迟元件;375
…
延迟元件;376
…
加法器。
具体实施方式
[0073]
以下,使用附图对本发明的优选实施方式详细进行说明。此外,以下说明的实施方式并非不当地限定权利要求书中记载的本发明的内容。另外,以下说明的构成并非全部都是本发明的必需构成要件。
[0074]
1.第一实施方式
[0075]
1-1.传感器模块的结构
[0076]
首先,对本实施方式的传感器模块的结构的一个例子进行说明。
[0077]
图1是从固定有传感器模块1的被安装面侧观察时的传感器模块1的立体图。在以下的说明中,将沿着俯视时呈长方形的传感器模块1的长边的方向设为x轴方向,将俯视时与x轴方向正交的方向设为y轴方向,将传感器模块1的厚度方向设为z轴方向进行说明。
[0078]
传感器模块1是平面形状呈长方形的长方体,具有沿x轴方向的长边和沿与x轴方向正交的y轴方向的短边。在一条长边的各端部附近的两个部位以及另一条长边的中央部一个部位处形成有螺纹孔103。以在该三个部位的螺纹孔103中分别插入固定螺钉,并固定于例如大厦、公告板、各种装置等结构物的被安装体的被安装面上的状态进行使用。
[0079]
如图1所示,在传感器单元1的从被安装面侧观察的表面上设置有开口部121。开口部121的内部配置有插头型的连接器116。连接器116具有配置成两列的多个引脚,各列中多个引脚沿y轴方向排列。连接器116从被安装体与未图示的插座型的连接器连接,进行传感器模块1的驱动电压、检测数据等电信号的收发。
[0080]
图2是传感器模块1的分解立体图。如图2所示,传感器模块1由容器101、盖102、密封部件141以及电路基板115等构成。详细而言,传感器模块1呈如下构成:在容器101的内部,借助于固定部件130安装电路基板115,并通过隔着具有缓冲性的密封部件141的盖102覆盖容器101的开口。
[0081]
容器101是例如使用铝成形为具有内部空间的箱状的电路基板115的容纳容器。容器101的外形与上述传感器模块1的整体形状同样为平面形状呈大致长方形的长方体,在一条长边的两端部附近的两个部位以及另一条长边的中央部的一个部位处设置有固定突起104。在该固定突起104上分别形成有螺纹孔103。
[0082]
容器101是外形呈长方体且一侧开口的箱状。容器101的内部成为由底壁112和侧壁111围成的内部空间。换言之,容器101呈将与底壁112对置的一面作为开口面123的箱状,电路基板115的外缘沿着侧壁111的内表面122配置,并以将开口覆盖的方式固定盖102。在开口面123上,在容器101的一条长边的各端部附近的两个部位以及另一条长边的中央部的一个部位处,竖立设置有固定突起104。而且,固定突起104的上表面、即朝向-z方向露出的面从容器101的上表面突出。
[0083]
另外,在容器101的内部空间中,在与设置于另一条长边的中央部处的固定突起104对置的一条长边的中央部处,设置有从底壁112至开口面123之间从侧壁111朝向内部空
间侧突出的突起129。突起129的上表面上设置有内螺纹174。盖102通过插通于贯通孔176的螺钉172和内螺纹174,隔着密封部件141固定于容器101。此外,突起129和固定突起104设置于与后述电路基板115的缩颈部133,134相对的位置处。
[0084]
在容器101的内部空间中,设置有从底壁112朝向开口面123侧呈高出一层的台阶状突出的第一基座127及第二基座125。第一基座127设置于与安装在电路基板115上的插头型的连接器116的配置区域相对的位置处。第一基座127上设置有图1所示的开口部121,开口部121中插入有插头型的连接器116。第一基座127作为用于将电路基板115固定于容器101上的基座发挥功能。
[0085]
第二基座125相对于位于长边的中央部的固定突起104及突起129而位于第一基座127的相反侧,并设置于固定突起104及突起129的附近。第二基座125相对于固定突起104及突起129在第一基座127的相反侧,作为用于将电路基板115固定于容器1上的基座发挥作用。
[0086]
此外,对容器101的外形为平面形状呈大致长方形的长方体且为无盖的箱状的情况进行了说明,但并不限于此,容器101的外形的平面形状也可以为正方形、六边形、八边形等。另外,在容器101的外形的平面形状中,也可以对多边形的顶点部分的角进行倒角,进而,也可以为各边的任一边由曲线构成的平面形状。另外,容器101的内部的平面形状也不限于上述形状,也可以为其他的形状。进而,容器101的外形和内部的平面形状既可以是相似形状,也可以不是相似形状。
[0087]
电路基板115是形成有多个通孔等的多层基板,使用例如玻璃环氧基板、复合基板、陶瓷基板等。
[0088]
电路基板115具有底壁112侧的第二面115r、和与第二面115r呈表背关系的第一面115f。在电路基板115的第一面115f上,搭载有振动整流误差校正装置2、三个物理量传感器200、以及其他的未图示的电子部件等。另外,电路基板115的第二面115r上搭载有连接器116。此外,虽然省略了图示及其说明,但也可以在电路基板115上设置其他的配线或端子电极等。
[0089]
电路基板115具备俯视时在沿着容器101的长边的x轴方向的中央部处电路基板115的外缘收缩的缩颈部133、134。缩颈部133、134在俯视时设置于电路基板115的y轴方向的两侧,从电路基板115的外缘朝向中央收缩。另外,缩颈部133、134与容器101的突起129及固定突起104对置而设置。
[0090]
电路基板115以第二面115r朝向第一基座127及第二基座125地插入容器1的内部空间。而且,电路基板115通过第一基座127和第二基座125而被容器101支撑。
[0091]
三个物理量传感器200分别是输出信号的频率根据被施加的物理量而变化的变频型的传感器。三个物理量传感器200中的物理量传感器200x检测x轴方向的物理量,物理量传感器200y检测y轴方向的物理量,物理量传感器200z检测z轴方向的物理量。具体而言,物理量传感器200x以封装件的表背面朝向x轴方向,而且侧面与电路基板115的第一面115f对置的方式竖立设置。而且,物理量传感器200x输出与检测到的x轴方向的物理量对应的信号。物理量传感器200y以封装件的表背面朝向y轴方向,而且侧面与电路基板115的第一面115f对置的方式竖立设置。而且,物理量传感器200y输出与检测到的y轴方向的物理量对应的信号。物理量传感器200z以封装件的表背面朝向z轴方向的方式、即封装件的表背面与电
路基板115的第一面115f正对的方式设置。而且,物理量传感器200z输出与检测到的z轴方向的物理量对应的信号。
[0092]
振动整流误差校正装置2经由未图示的配线或电子部件与物理量传感器200x、200y、200z电连接。另外,振动整流误差校正装置2根据物理量传感器200x、200y、200z的输出信号,生成减少了振动整流误差的物理量数据。
[0093]
1-2.物理量传感器的结构
[0094]
接着,以物理量传感器200为加速度传感器的情况为例,对物理量传感器200的结构的一个例子进行说明。图2所示的三个物理量传感器200、即物理量传感器200x、200y、200z的结构也可以相同。
[0095]
图3是物理量传感器200的立体图,图4是物理量传感器200的俯视图,图5是图4的p1-p1线处的剖视图。此外,图3至图5仅图示了物理量传感器200的封装件内部。在之后的各图中,为了便于说明,作为相互正交的三个轴,图示了x轴、y轴、z轴。另外,在之后的说明中,为了便于说明,也将从延伸部38a、38b的厚度方向即z轴方向观察时的俯视简称为“俯视”。
[0096]
如图3至图5所示,物理量传感器200具有基板部5和四个配重50、52、54、56。
[0097]
基板部5具备:板状的基部10,沿x轴方向延伸且具有相互朝向相反方向的主面10a、10b;连接部12,从基部10朝向y轴方向延伸;可动部13,从连接部12朝向与基部10相反的方向呈矩形状地延伸;两个支撑部30a、30b,从基部10的x轴方向的两端沿可动部13的外缘延伸;以及物理量检测元件40,从基部10架设于可动部13上并与基部10及可动部13接合。
[0098]
在两个支撑部30a、30b中,支撑部30a与可动部13隔开间隙32a沿着y轴延伸,并设置有固定支撑部30a的接合部36a、和与可动部13隔开间隙32c沿着x轴延伸的延伸部38a。换言之,支撑部30a与可动部13隔开间隙32a沿着y轴延伸,设置有与可动部13隔开间隙32c沿着x轴延伸的延伸部38a,并从支撑部30a起在延伸部38a部分上设置有接合部36a。另外,支撑部30b与可动部13隔开间隙32b沿着y轴延伸,并设置有固定支撑部30b的接合部36b、和与可动部13隔开间隙32c沿着x轴延伸的延伸部38b。换言之,支撑部30b与可动部13隔开间隙32b沿着y轴延伸,设置有与可动部13隔开间隙32c沿着x轴延伸的延伸部38b,并从支撑部30b起在延伸部38b部分上设置有接合部36b。
[0099]
此外,设置于支撑部30a、30b上的接合部36a、36b用于将物理量传感器200的基板部5安装至封装件等的外部部件。另外,基部10、连接部12、可动部13、支撑部30a、30b以及延伸部38a、38b也可以一体地形成。
[0100]
可动部13被支撑部30a、30b及基部10包围,经由连接部12与基部10连接,呈被单臂支撑的状态。而且,可动部13具有相互朝向相反方向的主面13a、13b、和沿着支撑部30a的侧面13c及沿着支撑部30b的侧面13d。主面13a是朝向与基部10的主面10a相同的一侧的面,主面13b是朝向与基部10的主面10b相同的一侧的面。
[0101]
连接部12设置于基部10与可动部13之间,并连接基部10与可动部13。连接部12的厚度形成得比基部10和可动部13的厚度薄。连接部12具有槽12a、12b。该槽12a、12b沿x轴形成,连接部12在可动部13相对于基部10位移时,以槽12a、12b作为支点、即中间铰链发挥功能。这样的连接部12及可动部13作为悬臂发挥功能。
[0102]
另外,在从基部10的主面10a至可动部13的主面13a为止的面上,通过接合剂60固定有物理量检测元件40。物理量检测元件40的固定位置为主面10a及主面13a各自的x轴方
向上的中央位置的两个部位。
[0103]
物理量检测元件40具有:基台(base)部42a,通过接合剂60被固定于基部10的主面10a上;基台部42b,通过接合剂60被固定于可动部13的主面13a上;以及振动梁41a、41b,位于基台部42a与基台部42b之间并用于检测物理量。该情况下,振动梁41a、41b的形状为棱柱状,当对设置于振动梁41a、41b的未图示的激振电极施加交流电压的驱动信号时,沿着x轴相互分离或接近地进行屈曲振动。即,物理量检测元件40为音叉型振动片。
[0104]
物理量检测元件40的基台部42a上设置有引出电极44a、44b。该引出电极44a、44b与设置于振动梁41a、41b的未图示的激励电极电连接。引出电极44a、44b通过金属线48与设置于基部10的主面10a上的连接端子46a、46b电连接。连接端子46a、46b通过未图示的配线与外部连接端子49a、49b电连接。外部连接端子49a、49b以在俯视时与封装件接合部34重叠的方式,设置于物理量传感器200被安装在封装件等上的一侧的面即基部10的主面10b侧。封装件接合部34用于将物理量传感器200的基板部5安装至封装件等的外部部件,在基部10的x轴方向的两端侧的端部设置有两个。
[0105]
物理量检测元件40通过利用光刻技术及蚀刻技术对从水晶的原石等以规定的角度切出的水晶基板进行图案化而形成。该情况下,考虑到减小与基部10及可动部13的线膨胀系数之差,物理量检测元件40优选材质与基部10及可动部13的材质相同。
[0106]
配重50、52、54、56在俯视时呈矩形状,设置于可动部13上。配重50、52通过接合部件62固定于可动部13的主面13a上,配重54、56通过接合部件62固定于可动部13的主面13b上。在此,固定于主面13a上的配重50在俯视时,作为矩形的边缘的一边与可动部13的侧面13c的方向一致,而且另一边与延伸部38a的侧面31d的方向一致,通过这样使方向一致而配置于可动部13的侧面13c侧,并配置为俯视时配重50与延伸部38a重叠。同样地,固定于主面13a上的配重52在俯视时,作为矩形的边缘的一边与可动部13的侧面13d的方向一致,而且另一边与延伸部38b的侧面31e的方向一致,由此配置于可动部13的侧面13d侧,并配置为俯视时配重52与延伸部38b重叠。固定于主面13b上的配重54在俯视时,矩形的一边与可动部13的侧面13c的方向一致,而且另一边与延伸部38a的侧面31d的方向一致,由此配置于可动部13的侧面13c侧,并配置为俯视时配重54与延伸部38a重叠。同样地,固定于主面13b上的配重56在俯视时,矩形的一边与可动部13的侧面13d的方向一致,而且另一边与延伸部38b的侧面31e的方向一致,由此配置于可动部13的侧面13d侧,并配置为俯视时配重56与延伸部38b重叠。
[0107]
这样配置的配重50、52、54、56中的配重50、52以物理量检测元件40为中心左右对称地配置,配重54、56被配置为俯视时分别与配重50、52重叠。这些配重50、52、54、56通过分别设置于配重50、52、54、56的重心位置的接合部件62而被固定于可动部13。另外,由于俯视时配重50、54与延伸部38a以及配重52、56与延伸部38b分别重叠,因此,在被施加了过剩的物理量的情况下,配重50、52、54、56与延伸部38a、38b抵接,从而能够抑制配重50、52、54、56的位移量。
[0108]
接合部件62由硅树脂系的热固化型粘接剂等构成。在可动部13的主面13a及主面13b上分别各涂敷有两处,在载置了配重50、52、54、56之后,通过加热而固化,从而将配重50、52、54、56固定于可动部13上。此外,配重50、52、54、56的与可动部13的主面13a及主面13b相对的接合面为粗糙面。由此,在向可动部13固定配重50、52、54、56时,接合面中的接合
面积变大,从而能够提高接合强度。
[0109]
如图6所示,当对以上那样构成的物理量传感器200施加以箭头α1表示的 z方向的加速度时,在可动部13上作用有-z方向的力,可动部13以连接部12为支点朝向-z方向位移。由此,沿y轴对物理量检测元件40施加使基台部42a与基台部42b相互分离的方向的力,在振动梁41a、41b上产生拉伸应力。因此,振动梁41a、41b振动的频率变高。
[0110]
另一方面,如图7所示,当对物理量传感器200施加以箭头α2表示的-z方向的加速度时,在可动部13上作用有 z方向的力,可动部13以连接部12为支点朝向 z方向位移。由此,沿y轴对物理量检测元件40施加使基台部42a与基台部42b相互靠近的方向的力,在振动梁41a、41b上产生压缩应力。因此,振动梁41a、41b振动的频率变低。
[0111]
当振动梁41a、41b振动的频率根据加速度变化时,从物理量传感器200的外部连接端子49a、49b输出的信号的频率发生变化。传感器模块1能够根据物理量传感器200的输出信号的频率的变化,算出施加于物理量传感器200的加速度的值。
[0112]
此外,为了提高作为物理量的加速度的检测精度,连接作为固定部的基部10与可动部13的连接部12优选为作为q值高的部件的水晶。例如,基部10、支撑部30a、30b以及可动部13也可以由水晶板形成,连接部12的槽12a、12b从水晶板的两面通过半蚀刻而形成。
[0113]
1-3.传感器模块的功能性构成
[0114]
图8是传感器模块1的功能框图。如上所述,传感器模块1具备物理量传感器200x、200y、200z和振动整流误差校正装置2。
[0115]
振动整流误差校正装置2包括振荡电路201x、201y、201z、频率比测定电路202x、202y、202z、微控制单元210、存储部220以及接口电路230。
[0116]
振荡电路201x对物理量传感器200x的输出信号进行放大而生成驱动信号,并将该驱动信号施加于物理量传感器200x。通过该驱动信号,物理量传感器200x的振动梁41a、41b以与x轴方向的加速度对应的频率振动,该频率的信号从物理量传感器200x被输出。另外,振荡电路201x将作为对物理量传感器200x的输出信号进行放大后的矩形波信号的被测定信号sin_x输出至频率比测定电路202x。被测定信号sin_x是基于物理量传感器200x的输出信号的信号。此外,物理量传感器200x是“第一物理量传感器”的一个例子,被测定信号sin_x是“第一被测定信号”的一个例子。
[0117]
同样地,振荡电路201y对物理量传感器200y的输出信号进行放大而生成驱动信号,并将该驱动信号施加于物理量传感器200y。通过该驱动信号,物理量传感器200y的振动梁41a、41b以与y轴方向的加速度对应的频率振动,该频率的信号从物理量传感器200y被输出。另外,振荡电路201y将作为对物理量传感器200y的输出信号进行放大后的矩形波信号的被测定信号sin_y输出至频率比测定电路202y。被测定信号sin_y是基于物理量传感器200y的输出信号的信号。此外,物理量传感器200y是“第二物理量传感器”的一个例子,另外,被测定信号sin_y是“第二被测定信号”的一个例子。
[0118]
同样地,振荡电路201z对物理量传感器200z的输出信号进行放大而生成驱动信号,并将该驱动信号施加于物理量传感器200z。通过该驱动信号,物理量传感器200z的振动梁41a、41b以与z轴方向的加速度对应的频率振动,该频率的信号从物理量传感器200z被输出。另外,振荡电路201z将作为对物理量传感器200z的输出信号进行放大后的矩形波信号的被测定信号sin_z输出至频率比测定电路202z。被测定信号sin_z是基于物理量传感器
200z的输出信号的信号。
[0119]
基准信号产生电路203产生恒定频率的基准信号clk并输出。在本实施方式中,基准信号clk的频率比被测定信号sin_x、sin_y、sin_z的频率高。优选基准信号clk的频率精度高,基准信号产生电路203例如也可以是温度补偿型水晶振荡器。
[0120]
频率比测定电路202x对基于从振荡电路201x输出的信号的信号即被测定信号sin_x的规定周期中包含的基准信号clk的脉冲数进行计数,并输出计数值cnt_x。计数值cnt_x是与被测定信号sin_x和基准信号clk的频率比对应的倒数计数值。
[0121]
频率比测定电路202y对从振荡电路201y输出的被测定信号sin_y的规定周期中包含的基准信号clk的脉冲数进行计数,并输出计数值cnt_y。计数值cnt_y是与被测定信号sin_y和基准信号clk的频率比对应的倒数计数值。
[0122]
频率比测定电路202z对从振荡电路201z输出的被测定信号sin_z的规定周期中包含的基准信号clk的脉冲数进行计数,并输出计数值cnt_z。计数值cnt_z是与被测定信号sin_z和基准信号clk的频率比对应的倒数计数值。
[0123]
存储部220存储程序和数据,也可以包括sram或dram等易失性存储器。sram是static random access memory(静态随机存取存储器)的缩写,dram是dynamic random access memory(动态随机存取存储器)的缩写。
[0124]
另外,存储部220也可以包括eeprom或闪存等半导体存储器、硬盘装置等磁存储装置、光盘装置等光学式存储装置等非易失性存储器。eeprom是electrically erasable programmable readonly memory(电可擦可编程只读存储器)的缩写。
[0125]
微控制单元210与基准信号clk同步地进行动作,通过执行存储单元220中存储的未图示的程序而进行规定的运算处理和控制处理。例如,微控制单元210根据从频率比测定电路202x输出的计数值cnt_x、从频率比测定电路202y输出的计数值cnt_y以及从频率比测定电路202z输出的计数值cnt_z,测定物理量传感器200x、200y、200z分别检测出的物理量。具体而言,微控制单元210将计数值cnt_x、计数值cnt_y以及计数值cnt_z分别转换成x轴方向的物理量的测定值、y轴方向的物理量的测定值以及z轴方向的物理量的测定值。例如,也可以在存储部220中存储规定了计数值与物理量的测定值的对应关系的表信息、或者计数值与物理量的测定值的关系式的信息,微控制单元210参照该信息将各计数值转换为物理量的测定值。
[0126]
微控制单元210也可以将x轴方向的物理量的测定值、y轴方向的物理量的测定值以及z轴方向的物理量的测定值经由接口电路230发送至处理装置3。或者,微控制单元210也可以将x轴方向的物理量的测定值、y轴方向的物理量的测定值以及z轴方向的物理量的测定值分别写入存储部220,处理装置3经由接口电路230读出各测定值。
[0127]
此外,由于频率比测定电路202x、202y、202z的构成及动作相同,因而之后将频率比测定电路202x、202y、202z中的任意一个称为频率比测定电路202。另外,将输入至频率比测定电路202的被测定信号sin_x、sin_y、sin_z中的任意一个称为被测定信号sin,将从频率比测定电路202输出的计数值cnt_x、cnt_y、cnt_z中的任意一个称为计数值cnt。
[0128]
1-4.振动整流误差
[0129]
振动整流误差对应于由于传感器模块1对振动的响应的非线性特性而在整流时产生的dc偏移,作为传感器模块1的输出偏移的异常位移被进行观测。在使用了传感器模块1
的倾斜仪等、传感器模块1的dc输出直接成为测定对象这样的应用中,成为严重的测定误差的主要原因。作为产生振动整流误差的主要机理,可以举出:[1]因为非对称轨道引起的、[2]因为比例因子的非线性特性引起的、[3]因为物理量传感器200的结构谐振引起的这三个。
[0130]
[1]因为非对称轨道产生的振动整流误差
[0131]
在物理量传感器200的灵敏度轴位于重力加速度方向时,在传感器模块1的测定值中产生与重力加速度为1g=9.8m/s2对应的偏移。例如,若物理量传感器200的动态范围为2g,则能够无限幅地进行测定的为到1g为止的振动。若在该状态下施加超过1g的振动,则非对称地产生限幅,因而在测定值中包含振动整流误差。
[0132]
例如,在动态范围为如15g这样宽时,几乎不会存在通常的使用环境下限幅成为问题的情况。另一方面,在物理量传感器200中,出于防止物理量检测元件40破损的目的而内置有物理性的保护机构,当振动水平超过某一阈值时,保护机构发挥作用,因而产生限幅。为了防止该情况,需要对用于设置传感器模块1的配件进行研究,并实施对谐振频带的振动进行阻尼等对策。
[0133]
[2]因为比例因子的非线性特性而产生的振动整流误差
[0134]
图9是从原理上说明因为输出波形畸变产生振动整流误差的情况的图。在图9中,实线表示正弦波的振动波形以及将该振动波形平滑化后的波形,虚线表示在振动中心的上下非对称的振动波形以及将该振动波形平滑化后的波形。相对于实线所示的平滑化波形为0,虚线所示的平滑化波形为负的值,且在平滑时产生偏移。
[0135]
物理量传感器200是变频型的传感器,与被测定信号sin和基准信号clk的频率比对应的计数值cnt为倒数计数值。施加于物理量传感器200的加速度与倒数计数值的关系具有非线性特性。图10的虚线表示施加的加速度与倒数计数值的非线性特性。另外,图11的虚线表示施加的加速度与物理量传感器200的振荡频率的非线性特性。另外,图12的虚线表示物理量传感器200的振荡频率与倒数计数值的非线性特性。图10的虚线通过图11的虚线与图12的虚线的合成而得到。
[0136]
在此,通过将振荡频率与倒数计数值的关系如图12的实线那样进行校正,能够使加速度与倒数计数值的关系如图10的实线那样接近于线性。具体而言,上述微控制单元210可以使用式(1)表示的校正函数来校正计数值cnt。
[0137]
[数式1]
[0138]
y={c-d}2ꢀꢀ
(1)
[0139]
在式(1)中,c为与图10的虚线对应的校正前的计数值,y是与图10的实线对应的校正后的计数值,d是决定图12所示的校正的程度的系数。例如,系数d存储于存储部220中,或者通过处理装置3设定。
[0140]
[3]因为悬臂谐振产生的振动整流误差
[0141]
作为加速度的检测原理,物理量传感器200通过将由加速度引起的带配重悬臂的挠曲传递至作为双音叉振子的物理量检测元件40,而使作用于物理量检测元件40的张力发生变化,由此使振荡频率发生变化。因此,物理量检测元件40具有由悬臂的结构引起的谐振频率,当激起悬臂谐振时,产生固有的振动整流误差。悬臂谐振是比对应于可检测的加速度的范围的频带高的频率,其振动成分通过振动整流误差校正装置2的内部的低通滤波器而
被除去,但作为反映了振动的非对称性的偏置偏移而产生振动整流误差。随着悬臂谐振的振幅变大,物理量传感器200的输出波形的非对称性增加,由此振动整流误差也增加。因此,减少因为悬臂谐振产生的振动整流误差成为重要的课题。
[0142]
在本实施方式中,频率比测定电路202是对被测定信号sin的规定周期中包含的基准信号clk的脉冲数进行计数的倒数计数方式,因此,获取该计数值的定时与被测定信号sin同步。另一方面,从频率比测定电路202输出的计数值cnt需要与基准信号clk的分频信号同步,获取基准信号clk的脉冲数的计数值的定时与基准信号clk的分频信号不同步,因而需要重采样。在频率比测定电路202中,通过设计重采样所需的构成,能够生成因为悬臂谐振产生的振动整流误差得到校正的计数值cnt。
[0143]
1-5.频率比测定电路的构成
[0144]
频率比测定电路202通过倒数计数方式测定被测定信号sin与基准信号clk的频率比。图13是表示频率比测定电路202的构成例的图。如图13所示,频率比测定电路202具备频率δσ调制电路300、第一低通滤波器310、锁存电路320以及第二低通滤波器330。
[0145]
频率δσ调制电路300使用被测定信号sin,对基准信号clk进行频率δσ调制,生成频率δσ调制信号。频率δσ调制电路300具备计数器301、锁存电路302、锁存电路303以及减法器304。计数器301对基准信号clk的上升沿进行计数并输出计数值ct0。锁存电路302与被测定信号sin的上升沿同步地锁存并保持计数值ct0。锁存电路303与被测定信号sin的上升沿同步地锁存并保持锁存电路302所保持的计数值。减法器304从锁存电路302保持的计数值减去锁存电路303保持的计数值,生成计数值ct1并输出。该计数值ct1是频率δσ调制电路300生成的频率δσ调制信号。
[0146]
该频率δσ调制电路300也被称为一次频率δσ调制器,将基准信号clk的脉冲数的计数值通过被测定信号sin锁存两次,将被测定信号sin的上升沿作为触发,依次保持基准信号clk的脉冲数的计数值。在此,作为设定频率δσ调制电路300在被测定信号sin的上升沿进行锁存动作的情况进行了说明,但也可以在下降沿、或者上升沿及下降沿两者进行锁存动作。另外,减法器304通过运算保持于锁存电路302、303的两个计数值的差值,而将在被测定信号sin推移一个周期的期间观测到的基准信号clk的脉冲数的计数值的增量与时间经过一起无死区期间地输出。在将被测定信号sin的频率设为fx、将基准信号clk的频率设为fc时,频率比为fc/fx。频率δσ调制电路300输出表示频率比的频率δσ调制信号作为数字信号串。
[0147]
第一低通滤波器310与被测定信号sin同步地进行动作,输出将作为从频率δσ调制电路300输出的频率δσ调制信号的计数值ct1中包含的噪声成分除去或减少了的计数值ct2。在图13中,第一低通滤波器310紧接着设置于频率δσ调制电路300之后,但只要设置于从频率δσ调制电路300的输出至第二低通滤波器330的输入为止的信号路径即可。
[0148]
锁存电路320与基准信号clk的上升沿同步地锁存从第一低通滤波器310输出的计数值ct2,并保持为计数值ct3。
[0149]
第二低通滤波器330与基准信号clk同步地进行动作,输出将锁存电路320保持的计数值ct3中包含的噪声成分除去或减少了的计数值。从该第二低通滤波器330输出的计数值作为计数值cnt输出至微控制单元210。
[0150]
图14是表示第一低通滤波器310的构成例的图。在图14的例子中,第一低通滤波器
310具有延迟元件311、积分器312、积分器313、抽取器314、延迟元件315、微分器316、延迟元件317以及微分器318。第一低通滤波器310的各部与被测定信号sin同步地进行动作。
[0151]
延迟元件311与被测定信号sin同步地输出使计数值ct1延迟了的计数值。延迟元件311的抽头数为na。例如,延迟元件311通过na个寄存器串行连接的移位寄存器而实现。
[0152]
积分器312与被测定信号sin同步地输出对从延迟元件311输出的计数值进行了累加的计数值。
[0153]
积分器313与被测定信号sin同步地输出对从积分器312输出的计数值进行了累加的计数值。
[0154]
抽取器314与被测定信号sin同步地输出将从积分器313输出的计数值按1/r的比例进行了抽取的计数值。
[0155]
延迟元件315与被测定信号sin同步地输出使从抽取器314输出的计数值延迟了的计数值。延迟元件315的抽头数为n1。例如,延迟元件315通过n1个寄存器串行连接的移位寄存器而实现。
[0156]
微分器316输出从抽取器314输出的计数值减去了延迟元件315输出的计数值的计数值。
[0157]
延迟元件317与被测定信号sin同步地输出使从微分器316输出的计数值延迟了的计数值。延迟元件317的抽头数为n2。例如,延迟元件317通过n2个寄存器串行连接的移位寄存器而实现。
[0158]
微分器318输出从微分器316输出的计数值减去了延迟元件317输出的计数值的计数值ct2。
[0159]
抽头数n1、n2以及抽取比r是固定的,抽头数na是可变的。例如,抽头数na存储于存储部220中,或者通过处理装置3设定。
[0160]
这样构成的第一低通滤波器310作为群延迟量根据抽头数na可变的cic滤波器发挥功能。cic是cascaded integrator comb(级联积分梳状)的缩写。
[0161]
图15是表示第二低通滤波器330的构成例的图。在图15的例子中,第二低通滤波器330具有积分器331、延迟元件332、微分器333以及抽取器334。第二低通滤波器330的各部与基准信号clk同步地进行动作。
[0162]
积分器331与基准信号clk同步地输出将计数值ct3进行了累加的计数值。
[0163]
延迟元件332与基准信号clk同步地输出使从积分器331输出的计数值延迟了的计数值。延迟元件332的抽头数为n3。例如,延迟元件332通过n3个寄存器串行连接的移位寄存器而实现。
[0164]
微分器333输出从积分器331输出的计数值减去了延迟元件332输出的计数值的计数值。
[0165]
抽取器334与基准信号clk同步地输出将从微分器333输出的计数值按1/n3的比例进行了抽取的计数值cnt。
[0166]
抽头数及作为抽取比的n3是固定的。
[0167]
这样构成的第二低通滤波器330由于是在利用基准信号clk对计数值ct3进行重采样的同时进行累加,因此,作为将计数值ct3在其持续时间进行加权的加权移动平均滤波器发挥功能。
[0168]
这样,第一低通滤波器310与被测定信号sin同步地进行动作,第二低通滤波器330进行与基准信号clk同步的重采样,因此,在频率比测定电路202的输入输出中产生非线性特性。因此,在从频率比测定电路202输出的计数值cnt中,包含由该非线性特性引起的振动整流误差。而且,通过调整第一低通滤波器310所具有的延迟元件311的抽头数na,能够调整该振动整流误差。
[0169]
图16是用于说明能够调整由频率比测定电路202的输入输出的非线性特性引起的振动整流误差的情况的图。在图16中,示出了被测定信号sin的周期比基准信号clk的周期长、计数值cnt的更新周期比被测定信号sin的周期长的情况的例子,横轴方向对应于时间的经过。在图16中,关于基准信号clk,利用短的纵线表示上升沿的定时。另外,关于计数值ct1、ct2,利用短的纵线表示值变化的定时。此外,图16以说明振动整流误差的调整机制为目的,为了容易理解,使用简化的数值。另外,尽管只有在计数值ct1确定后才确定计数值ct2,也记载为在计数值ct1确定之前确定计数值ct2,但是,实际的计数值ct2的运算是在计数值ct1确定后执行。
[0170]
在图16中,(a)是被测定信号sin的周期恒定的情况的例子,(b)、(c)、(d)是被测定信号sin被调频的情况的例子。在(b)、(c)、(d)中,第一低通滤波器310的群延迟量互不相同。为了简单,将基准信号clk的周期和被测定信号sin的周期设为单纯的整数比,输入至第一低通滤波器310的计数值ct1以一定的群延迟直接被输出。第二低通滤波器330与基准信号clk同步地对从第一低通滤波器310输出的计数值ct2被锁存的计数值ct3进行累加,将16次的累加值作为计数值cnt输出。
[0171]
在(a)的例子中,计数值ct2始终为4,计数值cnt为4
×
16=64。在(b)的例子中,被测定信号sin被调频,将第一低通滤波器310的群延迟设为0,因而计数值ct2重复5、5、3、3。由于在累加时基于时间进行加权,因而计数值cnt为5
×
10 3
×
6=68,比(a)的计数值cnt大。在(c)的例子中,示出计数值ct2重复5、5、3、3的情况与(b)的例子相同,但在第一低通滤波器310中产生群延迟的情况。在累加时基于时间进行加权,结果计数值cnt为5
×
8 3
×
8=64,成为与(a)的计数值cnt相同的值。在(d)的例子中,示出计数值ct2重复5、5、3、3的情况与(b)及(c)的例子相同,但与(c)的例子相比较在第一低通滤波器310中产生的群延迟大的情况。在(d)的例子中,计数值cnt为5
×
6 3
×
10=60,比(a)的计数值cnt小。
[0172]
根据使用图16的考察可以定性地理解为,由频率比测定电路202的输入输出的非线性特性引起的振动整流误差根据第一低通滤波器310的群延迟量变化。通过调整第一低通滤波器310的群延迟量,使得由该频率比测定电路202的输入输出的非线性特性引起的振动整流误差与由悬臂谐振产生的振动整流误差呈相反相位,从而能够消除彼此的振动整流误差。第一低通滤波器310的群延迟量能够通过延迟元件311的抽头数na的设定进行调整。
[0173]
图17是表示振动整流误差校正装置2的测定值中包含的振动整流误差对抽头数na的依赖性的图。在图17中,横轴是抽头数na,纵轴是振动整流误差。此外,纵轴的vre是vibration rectification error(振动整流误差)的简称。根据图17,若适当地设定抽头数na,则能够校正振动整流误差使其接近于0。
[0174]
在图14的构成的第一低通滤波器310中,延迟元件311由使用了移位寄存器的fifo寄存器实现,因此,当将该fifo寄存器取出至第一低通滤波器310的外部时,图13的构成的频率比测定电路202变为图18所示的构成,图14的构成的第一低通滤波器310变为图19所示
的构成。fifo是first in first out(先进先出)的缩写。
[0175]
在图20中,示出被输入至fifo寄存器340的计数值ct1及从fifo寄存器340输出的计数值ct1’的时序的一个例子。在图20的例子中,计数值ct1、ct1’与被测定信号sin的两个边沿同步地变化。即,在图20的例子中,频率δσ调制电路300及fifo寄存器340与被测定信号sin的两个边沿同步地进行动作。事件(case)1是fifo寄存器340的级数为2的情况,事件2是fifo寄存器340的级数为4的情况。
[0176]
在图18的构成的频率比测定电路202中,若调整与延迟元件311的抽头数na等价的fifo寄存器340的级数而适当地设定群延迟量,则也能够校正振动整流误差使其接近于0。
[0177]
但是,由于物理量传感器200x、200y、200z具有的三个物理量检测元件40的特性各自具有偏差,因此,在频率比测定电路202x、202y、202z中,振动整流误差的校正所需的群延迟量的最佳值也各自具有偏差。因此,在频率比测定电路202x、202y、202z的群延迟量的最佳值互不相同的情况下,从被测定信号sin_x、sin_y、sin_z分别被输入至频率比测定电路202x、202y、202z起至计数值cnt_x、cnt_y、cnt_z分别被输出为止的时间也互不相同。因此,例如,在x轴、y轴以及z轴之间要求高精度的同步测量的情况下有可能成为问题。
[0178]
因此,在本实施方式中,对频率比测定电路202进行改良,以便通过在将群延迟量固定的状态下控制输出计数值ct1’的定时,即,通过控制从第一低通滤波器310输出计数值ct2的定时来校正振动整流误差。
[0179]
图21是用于说明通过控制输出计数值ct2的定时,能够调整由频率比测定电路202的输入输出的非线性特性引起的振动整流误差的情况的图。在图21中,示出了被测定信号sin的周期比基准信号clk的周期长、计数值cnt的更新周期比被测定信号sin的周期长的情况的例子,横轴方向对应于时间的经过。在图21中,关于基准信号clk,利用短的纵线表示上升沿的定时。另外,关于计数值ct1、ct2,利用短的纵线表示值变化的定时。此外,图21以说明振动整流误差的调整机制为目的,为了容易理解,使用简化的数值。另外,尽管只有在计数值ct1确定后才确定计数值ct2,也记载为在计数值ct1确定之前确定计数值ct2,但是,实际的计数值ct2的运算是在计数值ct1确定后执行。
[0180]
在图21中,(a)是被测定信号sin的周期恒定的情况的例子,(b)、(c)、(d)是被测定信号sin被调频的情况的例子。在(b)、(c)、(d)中,计数值ct2的输出定时互不相同。为了简单,将基准信号clk的周期和被测定信号sin的周期设为单纯的整数比,计数值ct1以一定的定时从第一低通滤波器310直接输出。第二低通滤波器330与基准信号clk同步地对计数值ct2被锁存的计数值ct3进行累加,并将16次的累加值作为计数值cnt输出。
[0181]
在图21的(a)的例子中,计数值ct2始终为4,计数值cnt为4
×
16=64。在(b)的例子中,被测定信号sin被调频,使计数值ct2的输出定时与计数值ct1的输出定时相同,因而计数值ct2重复5、5、3、3。由于在累加时基于时间进行加权,因而计数值cnt为5
×
10 3
×
6=68,比(a)的计数值cnt大。在(c)的例子中,示出计数值ct2重复5、5、3、3的情况与(b)的例子相同,但使计数值ct2的输出定时相比计数值ct1的输出定时延迟的情况。在累加时基于时间进行加权,结果计数值cnt为5
×
8 3
×
8=64,成为与(a)的计数值cnt相同的值。在(d)的例子中,示出计数值ct2重复5、5、3、3的情况与(b)及(c)的例子相同,但与(c)的例子相比较使计数值ct2的输出定时进一步延迟的情况。在(d)的例子中,计数值cnt为5
×
6 3
×
10=60,比(a)的计数值cnt小。
[0182]
根据使用图21的考察可以定性地理解为,由频率比测定电路202的输入输出的非线性特性引起的振动整流误差根据计数值ct2的输出定时而变化。通过控制计数值ct2的输出定时,即控制计数值ct1’的输出定时,使得由该频率比测定电路202的输入输出的非线性特性引起的振动整流误差与由悬臂谐振产生的振动整流误差呈相反相位,从而能够消除彼此的振动整流误差。
[0183]
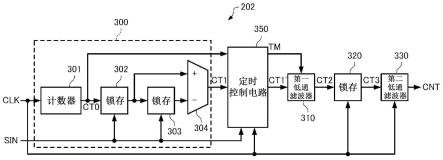
图22是表示改良为通过控制计数值ct1’的输出定时来校正振动整流误差的频率比测定电路202的构成例的图。在图22中,对与图18相同的构成要素标注相同的附图标记。
[0184]
在图22的例子中,频率比测定电路202具备频率δσ调制电路300、第一低通滤波器310、锁存电路320、第二低通滤波器330以及定时控制电路350。
[0185]
频率δσ调制电路300的动作与图13相同,故省略其说明。
[0186]
定时控制电路350中被输入作为δσ调制信号的计数值ct1。然后,定时控制电路350根据基准信号clk的脉冲数的计数值ct0,生成使被测定信号sin延迟后的定时信号tm,与定时信号tm同步地控制将作为被输入的信号的计数值ct1作为计数值ct1’输出的定时。
[0187]
第一低通滤波器310被输入作为定时控制电路350的输出信号的计数值ct1’,并与定时信号tm同步地进行动作。而且,第一低通滤波器310输出将计数值ct1’中包含的噪声成分除去或减少了的计数值ct2。
[0188]
锁存电路320及第二低通滤波器330的动作与图13相同,故省略其说明。
[0189]
图23是表示定时控制电路350的构成例的图。在图23的例子中,定时控制电路350具备锁存电路351、计数器352、双端口ram353、输出定时生成电路354、计数器355以及缓冲电路356。
[0190]
锁存电路351与被测定信号sin的边沿同步地将基准信号clk的脉冲数的计数值ct0的下位m位的值锁存,并作为计数值ict加以保持。m为1以上的整数。
[0191]
计数器352对被测定信号sin的边沿进行计数并输出计数值iaddr。
[0192]
双端口ram353与基准信号clk的上升沿同步地将计数值ict写入由计数值iaddr指定的地址。另外,双端口ram353将存储在由计数值oaddr指定的地址中的计数值作为计数值oct输出。
[0193]
每当计数值ct0的下位m位的值与计数值oct一致时,输出定时生成电路354便生成逻辑电平反转的定时信号tm。例如,每当计数值ct0的下位3位的值与计数值oct一致时,定时信号tm的逻辑电平反转。
[0194]
计数器355对定时信号tm的边沿进行计数并输出计数值oaddr。
[0195]
缓冲电路356与被测定信号sin的边沿同步地获取计数值ct1并加以保持,与定时信号tm的边沿同步地将所保持的m个计数值中最早的计数值作为计数值ct1’输出。m为2以上的整数。例如,缓冲电路356也可以为m级的fifo寄存器。
[0196]
这样构成的定时控制电路350根据计数值ct0生成使被测定信号sin延迟后的定时信号tm,与定时信号tm同步地控制将计数值ct1作为计数值ct1’输出的定时。微控制单元210设定计数值oaddr的初始值,当计数值oaddr的初始值改变时,计数值ct1’的输出定时改变。
[0197]
图24示出定时控制电路350动作时的各种信号的时序的一个例子。在图24的例子中,计数值ct0与基准信号clk的上升沿同步地从初始值0起每次递增1。由此,计数值ct0的
下位3位反复从0递增到7再返回到0。另外,计数值iaddr与被测定信号sin的两边沿同步地从初始值0起每次递增1。另外,计数值ict与被测定信号sin的两边沿同步地变化为计数值ct0的下位3位的值。另外,计数值ct1与被测定信号sin的两边沿同步地变化。事件1是计数值oaddr的初始值为2的情况,事件2是计数值oaddr的初始值为0的情况。
[0198]
计数值oaddr在从计数值iaddr开始递增起经过了规定时间之后被初始化。在图24的例子中,在计数值ct0成为16的定时,计数值oaddr被初始化。计数值oct与计数值oaddr同步地变化,每当计数值ct0的下位3位的值与计数值oct一致时,定时信号tm的逻辑电平反转。缓冲电路356是4级的fifo寄存器,与被测定信号sin的边沿同步地获取计数值ct1并加以保持,与定时信号tm的边沿同步地输出计数值ct1’。
[0199]
若对事件1与事件2进行比较,则由于定时信号tm的逻辑电平反转的定时不同,从而计数值ct1’的输出定时不同,因而由频率比测定电路202的输入输出的非线性特性引起的振动整流误差也不同。因此,可以通过设定计数值oaddr的初始值进行校正,以使因为悬臂谐振而最终产生的振动整流误差减少。
[0200]
计数值oaddr的初始值是用于控制使被测定信号sin延迟后的定时信号tm的延迟量的信息,存储在存储部220中。例如,在传感器模块1的制造工序中,检查装置经由接口电路230在依次变更计数值oaddr的初始值的同时获取测定值的振动整流误差,求出计数值oaddr的初始值与振动整流误差的关系。然后,检查装置根据计数值oaddr的初始值与振动整流误差的关系,算出测定值的振动整流误差被减少的计数值oaddr的初始值,并将算出的计数值oaddr的初始值经由接口电路230写入存储部220的非易失性存储器。这样,计数值oaddr的初始值在传感器模块1开始测定之前被存储在振动整流误差校正装置2的存储部220中。存储在存储部220中的计数值oaddr的初始值由微控制单元210读出,并设定在定时控制电路350的计数器355中。
[0201]
另外,在图24的例子中可知,事件1的计数值ct1’的输出定时与事件2的计数值ct1’的输出定时之差是小于被测定信号sin的一个周期的时间,群延迟量固定。图25是描绘了在如图13那样构成的频率比测定电路202中使抽头数na不同的两种情况的同一环境下的测定值的图。另一方面,图26是描绘了在如图22那样构成的频率比测定电路202中使计数值oaddr的初始值不同的两种情况的同一环境下的测定值的图。在图25及图26中,横轴为时间,纵轴为加速度。另外,实线表示一方的测定结果,单点划线表示另一方的测定结果。可以确认的是,相对于在图25中两个测定结果中产生1ms左右的群延迟差,在图26中两个测定结果的群延迟差为测定误差以下。
[0202]
此外,在图22的构成的频率比测定电路202x中,频率δσ调制电路300是“第一频率δσ调制电路”的一个例子,作为频率δσ调制电路300的输出信号的计数值ct1是“第一频率δσ调制信号”的一个例子,定时控制电路350是“第一定时控制电路”的一个例子。另外,在图22的构成的频率比测定电路202x中,第一低通滤波器310是“第一滤波器”的一个例子,第二低通滤波器330是“第二滤波器”的一个例子。另外,在图22的构成的频率比测定电路202x中,定时信号tm是“第一定时信号”的一个例子。另外,被测定信号sin_x是“第一被测定信号”的一个例子。
[0203]
另外,在图22的构成的频率比测定电路202y中,频率δσ调制电路300是“第二频率δσ调制电路”的一个例子,作为频率δσ调制电路300的输出信号的计数值ct1是“第二
频率δσ调制信号”的一个例子,定时控制电路350是“第三定时控制电路”的一个例子。另外,在图22的构成的频率比测定电路202y中,第一低通滤波器310是“第四滤波器”的一个例子,第二低通滤波器330是“第五滤波器”的一个例子。另外,在图22的构成的频率比测定电路202y中,定时信号tm是“第三定时信号”的一个例子。另外,被测定信号sin_y是“第二被测定信号”的一个例子。
[0204]
在图22中,在频率比测定电路202中,第一低通滤波器310紧接着设置于定时控制电路350之后,但第一低通滤波器310及定时控制电路350只要设置于从频率δσ调制电路300的输出至第二低通滤波器330的输入为止的信号路径即可。
[0205]
例如,如图27所示,在频率比测定电路202中,也可以在第一低通滤波器310之后紧接着设置定时控制电路350。将图27的构成的频率比测定电路202具有的定时控制电路350的构成例示于图28中。
[0206]
在图27的例子中,频率δσ调制电路300的动作与图13相同,故省略其说明。
[0207]
第一低通滤波器310被输入作为从频率δσ调制电路300输出的频率δσ调制信号的计数值ct1,并与被测定信号sin同步地进行动作。而且,第一低通滤波器310输出将计数值ct1中包含的噪声成分除去或减少了的计数值ct2。
[0208]
定时控制电路350中被输入作为第一低通滤波器310的输出信号的计数值ct2。而且,定时控制电路350根据基准信号clk的脉冲数的计数值ct0,生成使被测定信号sin延迟后的定时信号tm,并与定时信号tm同步地控制将作为输入的信号的计数值ct2作为计数值ct2’输出的定时。
[0209]
锁存电路320与基准信号clk的上升沿同步地锁存从定时控制电路350输出的计数值ct2’,并保持为计数值ct3。
[0210]
锁存电路320及第二低通滤波器330的动作与图13相同,故省略其说明。
[0211]
另外,图28所示的定时控制电路350除了缓冲电路356中被输入计数值ct2并输出计数值ct2’这一点以及定时信号tm未被输入第一低通滤波器310这一点以外,与图23所示的定时控制电路350相同,故省略其说明。
[0212]
此外,在图27的构成的频率比测定电路202x中,频率δσ调制电路300是“第一频率δσ调制电路”的一个例子,定时控制电路350是“第一定时控制电路”的一个例子。另外,在图27的构成的频率比测定电路202x中,第一低通滤波器310是“第一滤波器”的一个例子,第二低通滤波器330是“第二滤波器”的一个例子。另外,在图27的构成的频率比测定电路202x中,定时信号tm是“第一定时信号”的一个例子。
[0213]
另外,在图27的构成的频率比测定电路202y中,频率δσ调制电路300是“第二频率δσ调制电路”的一个例子,定时控制电路350是“第三定时控制电路”的一个例子。另外,在图27的构成的频率比测定电路202y中,第一低通滤波器310是“第四滤波器”的一个例子,第二低通滤波器330是“第五滤波器”的一个例子。另外,在图27的构成的频率比测定电路202y中,定时信号tm是“第三定时信号”的一个例子。
[0214]
1-6.振动整流误差校正方法
[0215]
图29是表示具备图22的构成的频率比测定电路202的振动整流误差校正装置2执行的振动整流误差校正方法的步骤的一个例子的流程图。
[0216]
如图29所示,首先,在工序s10中,振动整流误差校正装置2使用被测定信号sin对
基准信号clk进行频率δσ调制,生成频率δσ调制信号。
[0217]
接着,在工序s20中,振动整流误差校正装置2根据基准信号clk的脉冲数的计数值ct0生成使被测定信号sin延迟后的定时信号tm,并与定时信号tm同步地控制输出计数值ct1’的定时,该计数值ct1’是基于作为工序s10中生成的频率δσ调制信号的计数值ct1的信号。
[0218]
接着,在工序s30中,振动整流误差校正装置2与定时信号tm同步地对计数值ct1’进行第一滤波处理,该计数值ct1’是基于在工序s20中被控制了输出的定时的信号的信号。
[0219]
接着,在工序s40中,振动整流误差校正装置2与基准信号clk同步地对计数值ct3进行第二滤波处理,该计数值ct3是基于作为通过工序s30的第一滤波处理得到的信号的计数值ct2的信号。
[0220]
在工序s50中,振动整流误差校正装置2反复进行工序s10、s20、s30、s40,直到测定结束为止。
[0221]
图30是表示具备图27的构成的频率比测定电路202的振动整流误差校正装置2执行的振动整流误差校正方法的步骤的一个例子的流程图。
[0222]
如图30所示,首先,在工序s11中,振动整流误差校正装置2使用被测定信号sin对基准信号clk进行频率δσ调制,生成频率δσ调制信号。
[0223]
接着,在工序s21中,振动整流误差校正装置2与被测定信号sin同步地对计数值ct1进行第一滤波处理,该计数值ct1是基于工序s11中生成的频率δσ调制信号的信号。
[0224]
接着,在工序s31中,振动整流误差校正装置2根据基准信号clk的脉冲数的计数值ct0生成使被测定信号sin延迟后的定时信号tm,并与定时信号tm同步地控制输出计数值ct2’的定时,该计数值ct2’是基于作为通过工序s21的第一滤波处理得到的信号的计数值ct2的信号。
[0225]
接着,在工序s41中,振动整流误差校正装置2与基准信号clk同步地对计数值ct3进行第二滤波处理,该计数值ct3是基于计数值ct2’的信号,该计数值ct2’是在工序s31中与定时信号tm同步地被控制了输出的定时的信号。
[0226]
在工序s51中,振动整流误差校正装置2反复进行工序s11、s21、s31、s41,直到测定结束为止。
[0227]
1-7.作用效果
[0228]
如以上所说明,在第一实施方式的传感器模块1中,在振动整流误差校正装置2中,频率δσ调制电路300使用被测定信号sin对基准信号clk进行频率δσ调制,第一低通滤波器310与使被测定信号sin延迟后的定时信号tm或被测定信号sin同步地进行动作,第二低通滤波器330与不同于被测定信号sin的基准信号clk同步地进行动作。因此,在频率δσ调制信号与第二低通滤波器330的输出信号的关系中产生非线性特性,因为该非线性特性产生的振动整流误差根据定时信号tm的延迟量而变化。因此,通过将定时信号tm的延迟量设定为适当的值,从而使因为该非线性特性产生的振动整流误差和因为被测定信号sin的非对称性产生的振动整流误差相互抵消,第二低通滤波器330的输出信号中包含的振动整流误差减少。另外,在振动整流误差校正装置2中,定时控制电路350对输出基于频率δσ调制信号的信号的定时进行控制以校正振动整流误差,而不是对基于频率δσ调制信号的信号的延迟量进行控制,因此,被测定信号sin传输至第二低通滤波器330的输出为止的信号
路径的群延迟量恒定。因此,根据第一实施方式的传感器模块1,振动整流误差校正装置2能够在保持群延迟量固定的状态下校正振动整流误差。
[0229]
另外,根据第一实施方式的传感器模块1,在振动整流误差校正装置2中,通过将作为定时信号tm的延迟量的信息的计数值oaddr的初始值存储在存储部220的非易失性存储器中,从而不用从处理装置3接收该信息便能够校正振动整流误差。
[0230]
另外,在第一实施方式的传感器模块1中,在振动整流误差校正装置2中,被测定信号sin_x传输至频率比测定电路202x的第二低通滤波器330的输出为止的信号路径的群延迟量恒定,被测定信号sin_y传输至频率比测定电路202y的第二低通滤波器330的输出为止的信号路径的群延迟量恒定,被测定信号sin_z传输至频率比测定电路202z的第二低通滤波器330的输出为止的信号路径的群延迟量恒定。因此,从频率比测定电路202x被输入被测定信号sin_x起到输出对应的信号为止的时间、从频率比测定电路202y被输入被测定信号sin_y起到输出对应的信号为止的时间、以及从频率比测定电路202z被输入被测定信号sin_z起到输出对应的信号为止的时间大致相同。因此,根据第一实施方式的传感器模块1,在振动整流误差校正装置2中,能够在使频率比测定电路202x对被测定信号sin_x的测定、频率比测定电路202y对被测定信号sin_y的测定、频率比测定电路202z对被测定信号sin_z的测定的定时一致的同时校正振动整流误差,因此,测定精度和同步测量的精度提高。
[0231]
2.第二实施方式
[0232]
以下,关于第二实施方式的传感器模块,对于与第一实施方式相同的构成要素标注相同的附图标记,并省略或简化与第一实施方式重复的说明,主要对与第一实施方式不同的内容进行说明。
[0233]
在第一实施方式中,由于定时控制电路350的动作与被测定信号sin同步,因此,振动整流误差的校正分辨率取决于被测定信号sin的周期,被测定信号sin的周期越长则振动整流误差的校正分辨率越低。因此,振动整流误差的校正分辨率存在一定的界限。
[0234]
因此,在本实施方式中,为了提高振动整流误差的校正分辨率,对频率比测定电路202进行改良。图31是表示第二实施方式的传感器模块1具备的频率比测定电路202的构成例的图。在图31中,对与图22相同的构成要素标注相同的附图标记。
[0235]
在图31的例子中,频率比测定电路202具备频率δσ调制电路300、第一低通滤波器310、锁存电路320、锁存电路321、第二低通滤波器330、第一定时控制电路350-1、第二定时控制电路350-2、第三低通滤波器360、乘法器371、乘法器372以及加法器373。
[0236]
频率δσ调制电路300的动作与图22相同,故省略其说明。
[0237]
第一定时控制电路350-1中被输入作为δσ调制信号的计数值ct1。然后,第一定时控制电路350-1根据基准信号clk的脉冲数的计数值ct0,生成使被测定信号sin延迟后的第一定时信号tm-1,并与第一定时信号tm-1同步地控制将输入的信号即计数值ct1作为计数值ct1
’‑
1输出的定时。第一定时控制电路350-1的构成与图23所示的定时控制电路350的构成相同,故省略其图示及说明。
[0238]
第一低通滤波器310被输入作为第一定时控制电路350-1的输出信号的计数值ct1
’‑
1,并与第一定时信号tm-1同步地进行动作。而且,第一低通滤波器310输出将计数值ct1
’‑
1中包含的噪声成分除去或减少了的计数值ct2-1。
[0239]
锁存电路320与基准信号clk的上升沿同步地锁存从第一低通滤波器310输出的计
数值ct2-1,并保持为计数值ct3-1。
[0240]
第二定时控制电路350-2中被输入作为δσ调制信号的计数值ct1。然后,第二定时控制电路350-2根据基准信号clk的脉冲数的计数值ct0,生成使被测定信号sin延迟后的第二定时信号tm-2,并与第二定时信号tm-2同步地控制将输入的信号即计数值ct1作为计数值ct1
’‑
2输出的定时。第二定时控制电路350-2的构成与图23所示的定时控制电路350的构成相同,故省略其图示及说明。
[0241]
第三低通滤波器360被输入作为第二定时控制电路350-2的输出信号的计数值ct1
’‑
2,并与第二定时信号tm-2同步地进行动作。而且,第三低通滤波器360输出将计数值ct1
’‑
2中包含的噪声成分除去或减少了的计数值ct2-2。第三低通滤波器360的构成与图19所示的第一低通滤波器310的构成相同,故省略其图示及说明。
[0242]
锁存电路321与基准信号clk的上升沿同步地锁存从第三低通滤波器360输出的计数值ct2-2,并保持为计数值ct3-2。
[0243]
乘法器371输出将锁存电路320保持的计数值ct3-1放大a倍的计数值。a为规定的正实数。从乘法器371输出的计数值是基于第一低通滤波器310的输出信号的第一信号。
[0244]
乘法器372输出将锁存电路321保持的计数值ct3-2放大b倍的计数值。b为规定的正实数。从乘法器372输出的计数值是基于第三低通滤波器360的输出信号的第二信号。
[0245]
加法器373输出将作为第一信号的从乘法器371输出的计数值与作为第二信号的从乘法器372输出的计数值相加的计数值ct4。从加法器373输出的计数值ct4是基于第一信号和第二信号的第三信号。
[0246]
第二低通滤波器330中被输入作为第三信号的从加法器373输出的计数值ct4。而且,第二低通滤波器330与基准信号clk同步地进行动作,输出作为将计数值ct4中包含的噪声成分除去或减少了的第四信号的计数值。从该第二低通滤波器330输出的计数值作为计数值cnt输出至微控制单元210。
[0247]
在此,从第一定时控制电路350-1输出计数值ct1
’‑
1的定时以及从第二定时控制电路350-2输出计数值ct1
’‑
2的定时被控制为适当的定时,以使假设在作为第一信号的从乘法器371输出的计数值被输入至第二低通滤波器330的情况下从第二低通滤波器330输出的第五信号中包含的第一振动整流误差、和假设在作为第二信号的从乘法器372输出的计数值被输入至第二低通滤波器330的情况下从第二低通滤波器330输出的第六信号中包含的第二振动整流误差的极性不同。因此,通过加法器373中的第一信号与第二信号的相加,使第一振动整流误差与第二振动整流误差相互抵消,作为第四信号的计数值cnt中包含的振动整流误差减少。即,通过图31的构成的频率比测定电路202,振动整流误差的校正分辨率提高。
[0248]
图32是表示第二实施方式的传感器模块1具备的频率比测定电路202的其他构成例的图。在图32中,对与图31相同的构成要素标注相同的附图标记。
[0249]
在图32的例子中,频率比测定电路202具备频率δσ调制电路300、第一低通滤波器310、锁存电路320、锁存电路321、第二低通滤波器330、第一定时控制电路350-1、第二定时控制电路350-2、乘法器371、乘法器372以及加法器373。
[0250]
频率δσ调制电路300及第一低通滤波器310的动作与图27相同,故省略其说明。
[0251]
第一定时控制电路350-1中被输入作为第一低通滤波器310的输出信号的计数值
ct2。然后,第一定时控制电路350-1根据基准信号clk的脉冲数的计数值ct0,生成使被测定信号sin延迟后的第一定时信号tm-1,并与未图示的第一定时信号tm-1同步地控制将输入的信号即计数值ct2作为计数值ct2
’‑
1输出的定时。第一定时控制电路350-1的构成与图28所示的定时控制电路350的构成相同,故省略其图示及说明。另外,第一定时信号tm-1相当于图28的定时信号tm。
[0252]
锁存电路320与基准信号clk的上升沿同步地锁存从第一低通滤波器310输出的计数值ct2
’‑
1,并保持为计数值ct3-1。
[0253]
第二定时控制电路350-2中被输入作为第一低通滤波器310的输出信号的计数值ct2。然后,第二定时控制电路350-2根据基准信号clk的脉冲数的计数值ct0,生成使被测定信号sin延迟后的未图示的第二定时信号tm-2,并与第二定时信号tm-2同步地控制将输入的信号即计数值ct2作为计数值ct2
’‑
2输出的定时。第二定时控制电路350-2的构成与图28所示的定时控制电路350的构成相同,故省略其图示及说明。另外,第二定时信号tm-2相当于图28的定时信号tm。
[0254]
锁存电路321与基准信号clk的上升沿同步地锁存从第三低通滤波器360输出的计数值ct2
’‑
2,并保持为计数值ct3-2。
[0255]
乘法器371、乘法器372、加法器373以及第二低通滤波器330的动作与图31相同,故省略其说明。
[0256]
在此,从第一定时控制电路350-1输出计数值ct2
’‑
1的定时以及从第二定时控制电路350-2输出计数值ct2
’‑
2的定时被控制为适当的定时,以使假设在作为第一信号的从乘法器371输出的计数值被输入至第二低通滤波器330的情况下从第二低通滤波器330输出的第五信号中包含的第一振动整流误差、和假设在作为第二信号的从乘法器372输出的计数值被输入至第二低通滤波器330的情况下从第二低通滤波器330输出的第六信号中包含的第二振动整流误差的极性不同。因此,通过加法器373中的第一信号与第二信号的相加,使第一振动整流误差与第二振动整流误差相互抵消,作为第四信号的计数值cnt中包含的振动整流误差减少。即,通过图32的构成的频率比测定电路202,振动整流误差的校正分辨率提高。
[0257]
此外,在图31及图32中,频率δσ调制电路300是“第一频率δσ调制电路”的一个例子,第一定时控制电路350-1是“第一定时控制电路”的一个例子,第二定时控制电路350-2是“第二定时控制电路”的一个例子。另外,第一定时信号tm-1是“第一定时信号”的一个例子,第二定时信号tm-2是“第二定时信号”的一个例子。另外,第一低通滤波器310是“第一滤波器”的一个例子,第二低通滤波器330是“第二滤波器”的一个例子。
[0258]
例如,在传感器模块1的制造工序中,检查装置经由接口电路230在将第一定时控制电路350-1中的计数值oaddr的初始值和第二定时控制电路350-2中的计数值oaddr的初始值保持为相同的值并依次变更的同时获取测定值的振动整流误差,求出计数值oaddr的初始值与振动整流误差的关系。然后,检查装置根据计数值oaddr的初始值与振动整流误差的关系,算出测定值的振动整流误差被减少的第一定时控制电路350-1中的计数值oaddr的初始值、及第二定时控制电路350-2中的计数值oaddr的初始值,并将算出的这些计数值oaddr的初始值经由接口电路230写入存储部220的非易失性存储器中。这样,第一定时控制电路350-1中的计数值oaddr的初始值及第二定时控制电路350-2中的计数值oaddr的初始
值在传感器模块1开始测定之前被存储至振动整流误差校正装置2的存储部220中。存储在存储部220中的这些计数值oaddr的初始值由微控制单元210读出,并分别被设定在第一定时控制电路350-1的计数器355及第二定时控制电路350-2的计数器355中。
[0259]
图33是表示具备图31的构成的频率比测定电路202的振动整流误差校正装置2执行的振动整流误差校正方法的步骤的一个例子的流程图。
[0260]
如图33所示,首先,在工序s110中,振动整流误差校正装置2使用被测定信号sin对基准信号clk进行频率δσ调制,生成频率δσ调制信号。
[0261]
接着,在工序s120中,振动整流误差校正装置2根据基准信号clk的脉冲数的计数值ct0生成使被测定信号sin延迟后的第一定时信号tm-1,并与第一定时信号tm-1同步地控制输出计数值ct1
’‑
1的定时,该计数值ct1
’‑
1是基于作为工序s110中生成的频率δσ调制信号的计数值ct1的信号。
[0262]
接着,在工序s130中,振动整流误差校正装置2与第一定时信号tm-1同步地对计数值ct1
’‑
1进行第一滤波处理,该计数值ct1
’‑
1是基于在工序s120中被控制了输出的定时的信号的信号。
[0263]
接着,在工序s140中,振动整流误差校正装置2根据基准信号clk的脉冲数的计数值ct0生成使被测定信号sin延迟后的第二定时信号tm-2,并与第二定时信号tm-2同步地控制输出计数值ct1
’‑
2的定时,该计数值ct1
’‑
2是基于作为工序s110中生成的频率δσ调制信号的计数值ct1的信号。
[0264]
接着,在工序s150中,振动整流误差校正装置2与第二定时信号tm-2同步地对计数值ct1
’‑
2进行第三滤波处理,该计数值ct1
’‑
2是基于工序s140中被控制了输出的定时的信号的信号。
[0265]
接着,在工序s160中,振动整流误差校正装置2生成作为基于第一信号和第二信号的第三信号的计数值ct4,该第一信号是基于作为通过工序s130的第一滤波处理得到的信号的计数值ct2-1的信号,第二信号是基于作为通过工序s150的第三滤波处理得到的信号的计数值ct2-2的信号。
[0266]
接着,在工序s170中,振动整流误差校正装置2与基准信号clk同步地对工序s160中生成的作为第三信号的计数值ct4进行第二滤波处理,生成作为第四信号的计数值cnt。
[0267]
在工序s180中,振动整流误差校正装置2反复进行工序s110、s120、s130、s140、s150、s160、s170,直到测定结束为止。
[0268]
图34是表示具备图32的构成的频率比测定电路202的振动整流误差校正装置2执行的振动整流误差校正方法的步骤的一个例子的流程图。
[0269]
如图34所示,首先,在工序s111中,振动整流误差校正装置2使用被测定信号sin对基准信号clk进行频率δσ调制,生成频率δσ调制信号。
[0270]
接着,在工序s121中,振动整流误差校正装置2与被测定信号sin同步地对计数值ct1进行第一滤波处理,该计数值ct1是基于工序s111中生成的频率δσ调制信号的信号。
[0271]
接着,在工序s131中,振动整流误差校正装置2根据基准信号clk的脉冲数的计数值ct0生成使被测定信号sin延迟后的第一定时信号tm-1,并与第一定时信号tm-1同步地控制输出计数值ct2
’‑
1的定时,该计数值ct2
’‑
1是基于作为通过工序s121的第一滤波处理得到的信号的计数值ct2的信号。
[0272]
接着,在工序s141中,振动整流误差校正装置2根据基准信号clk的脉冲数的计数值ct0生成使被测定信号sin延迟后的第二定时信号tm-2,并与第二定时信号tm-2同步地控制输出计数值ct2
’‑
2的定时,该计数值ct2
’‑
2是基于作为通过工序s121的第一滤波处理得到的信号的计数值ct2的信号。
[0273]
接着,在工序s151中,振动整流误差校正装置2生成作为基于第一信号和第二信号的第三信号的计数值ct4,该第一信号是基于计数值ct2
’‑
1的信号,该计数值ct2
’‑
1是在工序s131中与第一定时信号tm-1同步地被控制了输出的定时的信号,第二信号是基于计数值ct2
’‑
2的信号,该计数值ct2
’‑
2是在工序s141中与第二定时信号tm-2同步地被控制了输出的定时的信号。
[0274]
接着,在工序s161中,振动整流误差校正装置2与基准信号clk同步地对工序s151中生成的作为第三信号的计数值ct4进行第二滤波处理,生成作为第四信号的计数值cnt。
[0275]
在工序s171中,振动整流误差校正装置2反复进行工序s111、s121、s131、s141、s151、s161,直到测定结束为止。
[0276]
根据以上说明的第二实施方式的传感器模块1,实现与第一实施方式的传感器模块1相同的效果。
[0277]
另外,在第二实施方式的传感器模块1中,在振动整流误差校正装置2中,频率δσ调制信号与第五信号及第六信号的关系产生非线性特性。并且,通过使第一定时信号tm-1的延迟量与第二定时信号tm-2的延迟量不同,使得频率δσ调制信号与第五信号的关系的非线性特性、和频率δσ调制信号与第六信号的关系的非线性特性的程度不同。因此,根据第二实施方式的传感器模块1,在振动整流误差校正装置2中,通过使用第一定时信号tm-1的延迟量和第二定时信号tm-2的延迟量被设定为适当的值的第一信号和第二信号,以使第五信号中包含的第一振动整流误差与第六信号中包含的第二振动整流误差的极性不同,从而使振动整流误差的校正分辨率提高,因而能够有效地减少第四信号中包含的振动整流误差。其结果是,由于能够有效地减少测定值的振动整流误差,因而物理量的测定精度提高。
[0278]
3.第三实施方式
[0279]
以下,关于第三实施方式的传感器模块,对于与第一实施方式或第二实施方式相同的构成要素标注相同的附图标记,并省略或简化与第一实施方式或第二实施方式重复的说明,主要对与第一实施方式及第二实施方式不同的内容进行说明。
[0280]
图35是表示第三实施方式的传感器模块1具备的频率比测定电路202的构成例的图。在图35中,对与图22相同的构成要素标注相同的附图标记。
[0281]
在图35的例子中,频率比测定电路202具备频率δσ调制电路300、第一低通滤波器310、锁存电路320、第二低通滤波器330、定时控制电路350、延迟元件374、延迟元件375以及加法器376。
[0282]
频率δσ调制电路300、定时控制电路350、第一低通滤波器310、锁存电路320以及第二低通滤波器330的动作与图22相同,故省略其说明。
[0283]
延迟元件374与基准信号clk同步地输出使作为第二低通滤波器330的输出信号的计数值ct4延迟了a倍的计数值。延迟元件374的抽头数为na。a为正实数。例如,延迟元件374通过乘法器、和na个寄存器串行连接而成的移位寄存器来实现。从延迟元件374输出的计数值是具有基于第二滤波器的输出信号的第一群延迟量的第一信号。
[0284]
延迟元件375与基准信号clk同步地输出使作为第二低通滤波器330的输出信号的计数值ct4延迟了b倍的计数值。b为正实数。延迟元件375的抽头数为nb。例如,延迟元件375通过乘法器、和nb个寄存器串行连接而成的移位寄存器来实现。从延迟元件375输出的计数值是具有基于第二滤波器的输出信号的与第一群延迟量不同的第二群延迟量的第二信号。
[0285]
加法器376输出将作为第一信号的从延迟元件374输出的计数值与作为第二信号的从延迟元件375输出的计数值相加的计数值。从加法器373输出的计数值ct4是基于第一信号和第二信号的第三信号。从该加法器373输出的计数值作为计数值cnt被输出至微控制单元210。
[0286]
在此,将第一群延迟量和第二群延迟量设定为适当的值,以使作为第一信号的从延迟元件374输出的计数值中包含的第一振动整流误差与作为第二信号的从延迟元件375输出的计数值中包含的第二振动整流误差的极性不同。因此,通过加法器376中的第一信号与第二信号的相加,使第一振动整流误差与第二振动整流误差相互抵消,作为第三信号的计数值cnt中包含的振动整流误差减少。即,通过图35的构成的频率比测定电路202,振动整流误差的校正分辨率提高。
[0287]
在图35中,在频率比测定电路202中,第一低通滤波器310紧接着设置于定时控制电路350之后,但第一低通滤波器310及定时控制电路350只要设置于从频率δσ调制电路300的输出至第二低通滤波器330的输入为止的信号路径即可。
[0288]
例如,如图36所示,在频率比测定电路202中,也可以在第一低通滤波器310之后紧接着设置定时控制电路350。在图36的例子中,频率δσ调制电路300、第一低通滤波器310、定时控制电路350、锁存电路320以及第二低通滤波器330的动作与图27相同,故省略其说明。另外,延迟元件374、延迟元件375以及加法器376的动作与图35相同,故省略其说明。
[0289]
此外,在图35及图36中,频率δσ调制电路300是“第一频率δσ调制电路”的一个例子,定时控制电路350是“第一定时控制电路”的一个例子。另外,定时信号tm是“第一定时信号”的一个例子。另外,第一低通滤波器310是“第一滤波器”的一个例子,第二低通滤波器330是“第二滤波器”的一个例子。
[0290]
例如,在传感器模块1的制造工序中,检查装置经由接口电路230在依次变更计数值oaddr的初始值的同时获取测定值的振动整流误差,求出计数值oaddr的初始值与振动整流误差的关系。然后,检查装置根据计数值oaddr的初始值与振动整流误差的关系,算出测定值的振动整流误差被减少的计数值oaddr的初始值。进而,在将计数值oaddr的初始值设定为算出的值的状态下,检查装置经由接口电路230将计数值oaddr的初始值设定为算出的值,将抽头数na、nb保持为相同的值并依次变更的同时获取测定值的振动整流误差,求出抽头数与振动整流误差的关系。然后,检查装置根据抽头数与振动整流误差的关系,算出测定值的振动整流误差被减少的抽头数na、nb以及实数a、b。检查装置将算出的计数值oaddr的初始值、抽头数na、nb以及实数a、b经由接口电路230写入存储部220的非易失性存储器。这样,计数值oaddr的初始值、抽头数na、nb以及实数a、b在传感器模块1开始测定之前被存储于振动整流误差校正装置2的存储部220中。存储在存储部220中的计数值oaddr的初始值由微控制单元210读出,并设定在定时控制电路350的计数器355中。另外,存储在存储部220中的抽头数na、nb以及实数a、b由微控制单元210读出,并被设定在延迟元件374、375中。
[0291]
图37是表示具备图35的构成的频率比测定电路202的振动整流误差校正装置2执
行的振动整流误差校正方法的步骤的一个例子的流程图。
[0292]
如图37所示,首先,在工序s210中,振动整流误差校正装置2使用被测定信号sin对基准信号clk进行频率δσ调制,生成频率δσ调制信号。
[0293]
接着,在工序s220中,振动整流误差校正装置2根据基准信号clk的脉冲数的计数值ct0生成使被测定信号sin延迟后的定时信号tm,并与定时信号tm同步地控制输出计数值ct1’的定时,该计数值ct1’是基于作为工序s210中生成的频率δσ调制信号的计数值ct1的信号。
[0294]
接着,在工序s230中,振动整流误差校正装置2与定时信号tm同步地对计数值ct1’进行第一滤波处理,该计数值ct1’是基于在工序s220中被控制了输出的定时的信号的信号。
[0295]
接着,在工序s240中,振动整流误差校正装置2与基准信号clk同步地对计数值ct3进行第二滤波处理,该计数值ct3是基于作为通过工序s230的第一滤波处理得到的信号的计数值ct2的信号。
[0296]
接着,在工序s250中,振动整流误差校正装置2生成作为基于第一信号和第二信号的第三信号的计数值cnt,该第一信号具有基于作为通过工序s240的第二滤波处理得到的信号的计数值ct4的第一群延迟量,第二信号具有基于作为通过工序s240的第二滤波处理得到的信号的计数值ct4的、与第一群延迟量不同的第二群延迟量。
[0297]
在工序s260中,振动整流误差校正装置2反复进行工序s210、s220、s230、s240、s250,直到测定结束为止。
[0298]
图38是表示具备图36的构成的频率比测定电路202的振动整流误差校正装置2执行的振动整流误差校正方法的步骤的一个例子的流程图。
[0299]
如图38所示,首先,在工序s211中,振动整流误差校正装置2使用被测定信号sin对基准信号clk进行频率δσ调制,生成频率δσ调制信号。
[0300]
接着,在工序s221中,振动整流误差校正装置2与被测定信号sin同步地对计数值ct1进行第一滤波处理,该计数值ct1是基于工序s211中生成的频率δσ调制信号的信号。
[0301]
接着,在工序s231中,振动整流误差校正装置2根据基准信号clk的脉冲数的计数值ct0生成使被测定信号sin延迟后的定时信号tm,并与定时信号tm同步地控制输出计数值ct2’的定时,该计数值ct2’是基于作为通过工序s221的第一滤波处理得到的信号的计数值ct2的信号。
[0302]
接着,在工序s241中,振动整流误差校正装置2与基准信号clk同步地对计数值ct3进行第二滤波处理,该计数值ct3是基于计数值ct2’的信号,该计数值ct2’是在工序s231中与定时信号tm同步地被控制了输出的定时的信号。
[0303]
接着,在工序s251中,振动整流误差校正装置2生成作为基于第一信号和第二信号的第三信号的计数值cnt,该第一信号具有基于作为通过工序s241的第二滤波处理得到的信号的计数值ct4的第一群延迟量,第二信号具有基于作为通过工序s241的第二滤波处理得到的信号的计数值ct4的、与第一群延迟量不同的第二群延迟量。
[0304]
在工序s261中,振动整流误差校正装置2反复进行工序s211、s221、s231、s241、s251,直到测定结束为止。
[0305]
根据以上说明的第三实施方式的传感器模块1,实现与第一实施方式的传感器模
块1相同的效果。
[0306]
另外,在第三实施方式的传感器模块1中,在振动整流误差校正装置2中,频率δσ调制信号与第一信号及第二信号的关系中产生非线性特性。并且,通过使第一信号具有的第一群延迟量与第二信号具有的第二群延迟量不同,使得频率δσ调制信号与第一信号的关系的非线性特性和频率δσ调制信号与第二信号的关系的非线性特性的程度不同。因此,根据第三实施方式的传感器模块1,在振动整流误差校正装置2中,通过使用第一群延迟量和第二群延迟量被设定为适当的值的第一信号和第二信号,以使第一信号中包含的第一振动整流误差与第二信号中包含的第二振动整流误差的极性不同,从而使振动整流误差的校正分辨率提高,因而能够有效地减少作为第三信号的计数值cnt中包含的振动整流误差。其结果是,由于能够有效地减少测定值的振动整流误差,因而物理量的测定精度提高。
[0307]
4.第四实施方式
[0308]
以下,关于第四实施方式的传感器模块,对于与第一实施方式、第二实施方式或者第三实施方式相同的构成要素标注相同的附图标记,并省略或简化与第一实施方式、第二实施方式或者第三实施方式重复的说明,主要对与第一实施方式、第二实施方式以及第三实施方式不同的内容进行说明。
[0309]
由于物理量传感器200的灵敏度与悬臂谐振频率强烈相关,因此,能够通过测量悬臂谐振频率来检查物理量传感器200的灵敏度异常。例如,若固定于悬臂上的配重因为某种原因而脱落,则悬臂的质量减少,因而悬臂谐振频率向高频位移。同时,物理量传感器200的灵敏度降低,出现物理量传感器200的灵敏度异常。另外,在悬臂因为强烈的冲击等受到损伤的情况下,也会出现物理量传感器200的灵敏度异常,悬臂谐振频率也会位移。因此,识别悬臂谐振频率成为用于判定物理量传感器200的灵敏度是否在规格内的一个方法。通常,谐振频率的识别中可以使用fft,但是,悬臂谐振频率是比测定对象的信号频带高的频率,谐振频率成分通过第一低通滤波器310及第二低通滤波器330进行衰减,因此,为了高精度地识别谐振频率,需要一些办法。如使用图21所说明,相对于从定时控制电路350输出计数值的定时的变化,振动整流误差以一定周期变化。该周期取决于悬臂谐振频率和物理量检测元件40的频率,当悬臂谐振频率或物理量检测元件40的频率变化时,振动整流误差的变动周期也变化。因此,通过测量振动整流误差的变化相对于从定时控制电路350输出计数值的定时的变化的周期,能够得到物理量传感器200的灵敏度是否在规格内的判定指标。
[0310]
由于第四实施方式的传感器模块1的构造及功能性构成与第一实施方式、第二实施方式或者第三实施方式相同,故省略其图示及说明。
[0311]
在第四实施方式的传感器模块1中,振动整流误差校正装置2具有通常动作模式和检查模式,在通常动作模式中测定上述被测定信号sin与基准信号clk的频率比,在检查模式中进行物理量传感器200的灵敏度检查。微控制单元210经由接口电路230从处理装置3接收规定的命令,由此将振动整流误差校正装置2设定为通常动作模式或检查模式。例如,在传感器模块1的制造工序中,也可以是检查装置将振动整流误差校正装置2设定为检查模式,振动整流误差校正装置2进行物理量传感器200的灵敏度检查。检查装置也可以根据灵敏度检查的结果进行传感器模块1的良品筛选。或者,在传感器模块1设置之后运转之前,处理装置3将振动整流误差校正装置2设定为检查模式,振动整流误差校正装置2进行物理量传感器200的灵敏度检查。处理装置3在根据灵敏度检查的结果得知物理量传感器200的灵
敏度无异常时,将振动整流误差校正装置2设定为通常动作模式,并使传感器模块1进行运转。在通常动作模式下,与第一实施方式、第二实施方式或第三实施方式同样地,得到振动整流误差被校正的测定值。另外,处理装置3也可以定期将振动整流误差校正装置2设定为检查模式,由振动整流误差校正装置2进行灵敏度检查。此外,通常动作模式是“第一动作模式”的一个例子,检查模式是“第二动作模式”的一个例子。
[0312]
在检查模式下,在稳定的振动环境下使物理量传感器200进行动作,微控制单元210作为控制电路发挥功能,一边使从定时控制电路350输出计数值的定时变化,一边根据物理量传感器200的输出信号获取振动整流误差的输出定时依赖性。为此,首先,微控制单元210使第二低通滤波器330的截止频率低于通常动作模式。具体而言,微控制单元210将第二低通滤波器330的截止频率设定为例如数hz,以增强第二低通滤波器330的输出值中包含的振动整流误差。例如,微控制单元210也可以通过使第二低通滤波器330的抽头数相比通常动作模式增加来降低截止频率。
[0313]
进而,微控制单元210在相对于图23或图28所示的构成的定时控制电路350依次改变计数值oaddr的初始值的同时获取测定值的振动整流误差,并使计数值oaddr的初始值与振动整流误差相对应地存储至存储部220中。
[0314]
处理装置3经由接口电路230从存储部220读出计数值oaddr的初始值与振动整流误差的对应信息,根据与图17所示那样的描绘抽头数与振动整流误差的关系的图表同样的、描绘计数值oaddr的初始值与振动整流误差的关系的图表,算出振动整流误差变化的周期。由于该周期取决于悬臂谐振频率和物理量检测元件40的频率,因而处理装置3可以对悬臂谐振频率进行逆运算。处理装置3可以根据算出的悬臂谐振频率,判定物理量传感器200的灵敏度是否在规格内。
[0315]
或者,微控制单元210也可以从存储部220读出计数值oaddr的初始值与振动整流误差的对应信息,根据描绘计数值oaddr的初始值与振动整流误差的关系的图表算出悬臂谐振频率,判定物理量传感器200的灵敏度是否在规格内。
[0316]
图39是表示第四实施方式的振动整流误差校正装置2执行的振动整流误差校正方法的步骤的一个例子的流程图。
[0317]
如图39所示,首先,在工序s310中设定为通常动作模式时,在工序s320中,振动整流误差校正装置2测定被测定信号sin与基准信号clk的频率比。具体而言,具备图22的构成的频率比测定电路202的振动整流误差校正装置2进行图29的工序s10、s20、s30、s40。另外,具备图27的构成的频率比测定电路202的振动整流误差校正装置2进行图30的工序s11、s21、s31、s41。另外,具备图31的构成的频率比测定电路202的振动整流误差校正装置2进行图33的工序s110、s120、s130、s140、s150、s160、s170。另外,具备图32的构成的频率比测定电路202的振动整流误差校正装置2进行图34的工序s111、s121、s131、s141、s151、s161。另外,具备图35的构成的频率比测定电路202的振动整流误差校正装置2进行图37的工序s210、s220、s230、s240、s250。另外,具备图36的构成的频率比测定电路202的振动整流误差校正装置2进行图38的工序s211、s221、s231、s241、s251。
[0318]
在工序s330中,振动整流误差校正装置2反复进行工序s320,直到测定结束为止。
[0319]
当在工序s310中未设定为通常动作模式,且在工序s340中设定为检查模式时,在工序s350中,振动整流误差校正装置2使第二低通滤波器330的截止频率低于通常动作模
式。
[0320]
接着,在工序s360中,振动整流误差校正装置2将计数值oaddr的初始值设定为规定值。
[0321]
接着,在工序s370中,振动整流误差校正装置2获取作为频率比测定电路202的输出值的计数值cnt。
[0322]
接着,在工序s380中,振动整流误差校正装置2判定是否获取到了灵敏度判定所需的频率比测定电路202的所有输出值。
[0323]
当所需的输出值的获取未完成时,在工序s390中,振动整流误差校正装置2变更计数值oaddr的初始值。
[0324]
然后,当所需的输出值的获取完成时,在工序s400中,处理装置3或振动整流误差校正装置2使用在工序s370中获取到的频率比测定电路202的输出值,算出振动整流误差的变化的周期。
[0325]
接着,在工序s410中,处理装置3或振动整流误差校正装置2根据振动整流误差的变化的周期算出悬臂谐振频率。
[0326]
接着,在工序s420中,处理装置3或振动整流误差校正装置2根据悬臂谐振频率,判定物理量传感器200的灵敏度是否在规格内。
[0327]
然后,在工序s430中,结束振动整流误差校正装置2的检查模式,反复进行工序s310及其之后的工序。
[0328]
根据以上说明的第四实施方式的传感器模块1,与第一实施方式、第二实施方式或第三实施方式的传感器模块1同样地,在振动整流误差校正装置2中,在通常动作模式下得到振动整流误差被减少的测定值。
[0329]
另一方面,在检查模式下,通过使第二低通滤波器330的截止频率低于通常动作模式,从而增强从第二低通滤波器330输出的信号中包含的振动整流误差。因此,根据第三实施方式的传感器模块1,振动整流误差校正装置2在检查模式下得到表示定时信号tm的延迟量与振动整流误差的关系的信息、或者表示第一定时信号tm-1的延迟量及第二定时信号tm-2的延迟量与振动整流误差的关系的信息。振动整流误差校正装置2、检查装置或者处理装置3通过使用该信息,能够算出物理量传感器200的悬臂谐振频率,并根据悬臂谐振频率判定物理量传感器200的灵敏度是否在规格内。
[0330]
5.变形例
[0331]
本发明并不限定于本实施方式,能够在本发明的主旨范围内实施各种变形。
[0332]
例如,在上述各实施方式中,传感器模块1具有三个物理量传感器200,但传感器模块1具有的物理量传感器200的数量也可以为一个、两个或四个以上。
[0333]
另外,在上述各实施方式中,例举了作为物理量传感器200而具备加速度传感器的传感器模块1为例,但传感器模块1也可以作为物理量传感器200而具备角速度传感器、压力传感器、光学传感器等的传感器。另外,传感器模块1也可以具备加速度传感器、角速度传感器、压力传感器、光学传感器等各种物理量传感器中的两种以上的物理量传感器。
[0334]
另外,在上述各实施方式中,作为物理量传感器200具有的物理量检测元件40而例举了使用水晶构成的元件为例,但是,物理量检测元件40也可以使用水晶以外的压电元件构成,还可以为静电电容式的mems元件。mems是micro electro mechanical systems(微型
机电系统)的简称。
[0335]
另外,在上述各实施方式中,作为第一滤波器例举了第一低通滤波器310为例,作为第二滤波器例举了第二低通滤波器330为例,作为第三滤波器例举了第三低通滤波器360为例,但第一滤波器、第二滤波器以及第三滤波器也可以为高通滤波器、带通滤波器或者平滑化滤波器。同样地,第一滤波处理、第二滤波处理以及第三滤波处理除了低通滤波处理以外,也可以是高通滤波处理、带通滤波处理或者平滑化滤波处理。
[0336]
本发明并不限定于本实施方式,能够在本发明的主旨范围内实施各种变形。
[0337]
上述实施方式及变形例是一个例子,并不限定于此。例如,也可以将各实施方式以及各变形例适当地进行组合。
[0338]
本发明包括与实施方式中说明过的构成实质上相同的构成,例如功能、方法以及结果相同的构成、或者目的及效果相同的构成。另外,本发明包括将实施方式中说明过的构成的非本质部分替换后的构成。另外,本发明包括发挥与实施方式中说明过的构成相同的作用效果的构成或者能够实现相同目的的构成。另外,本发明包括对实施方式中说明过的构成附加公知技术而成的构成。
[0339]
从上述实施方式以及变形例能够导出以下的内容。
[0340]
振动整流误差校正装置的一方式具备:
[0341]
基准信号产生电路,输出基准信号;
[0342]
第一频率δσ调制电路,使用第一被测定信号对所述基准信号进行频率δσ调制,生成第一频率δσ调制信号;
[0343]
第一滤波器;
[0344]
第二滤波器,与所述基准信号同步地进行动作;以及
[0345]
第一定时控制电路,根据所述基准信号的脉冲数的计数值生成使所述第一被测定信号延迟后的第一定时信号,并与所述第一定时信号同步地控制输出被输入的信号的定时,
[0346]
所述第一滤波器及所述第一定时控制电路设置于从所述第一频率δσ调制电路的输出至所述第二滤波器的输入为止的信号路径。
[0347]
在该振动整流误差校正装置中,由于频率δσ调制电路使用第一被测定信号对基准信号进行频率δσ调制,第二滤波器与不同于第一被测定信号的基准信号同步地进行动作,因此,在频率δσ调制信号与第二滤波器的输出信号的关系中产生非线性特性。并且,因为该非线性特性产生的振动整流误差根据第一定时信号的延迟量而变化。因此,通过将第一定时信号的延迟量设定为适当的值,从而使因为该非线性特性产生的振动整流误差和因为第一被测定信号的非对称性产生的振动整流误差相互抵消,第二滤波器的输出信号中包含的振动整流误差被减少。另外,由于是对输出基于频率δσ调制信号的信号的定时进行控制以校正振动整流误差,而不是对基于频率δσ调制信号的信号的延迟量进行控制,因此,第一被测定信号传输至第二滤波器的输出为止的信号路径的群延迟量恒定。因此,根据该振动整流误差校正装置,能够在保持群延迟量固定的状态下校正振动整流误差。
[0348]
所述振动整流误差校正装置的一方式,
[0349]
也可以具备存储部,该存储部存储用于控制所述第一定时信号的延迟量的信息。
[0350]
根据该振动整流误差校正装置,不用从外部装置接收第一定时信号的延迟量的信
息便可校正振动整流误差。
[0351]
在所述振动整流误差校正装置的一方式中,也可以是:
[0352]
所述第一定时控制电路中被输入所述第一频率δσ调制信号,
[0353]
所述第一滤波器被输入所述第一定时控制电路的输出信号,并与所述第一定时信号同步地进行动作。
[0354]
所述振动整流误差校正装置的一方式,也可以具备:
[0355]
第二定时控制电路,被输入所述第一频率δσ调制信号,根据所述基准信号的脉冲数的计数值生成使所述第一被测定信号延迟后的第二定时信号,并与所述第二定时信号同步地控制输出被输入的信号的定时;以及
[0356]
第三滤波器,被输入所述第二定时控制电路的输出信号,并与所述第一定时信号同步地进行动作,
[0357]
所述第二滤波器被输入基于第一信号和第二信号的第三信号并输出第四信号,所述第一信号基于所述第一滤波器的输出信号,所述第二信号基于所述第三滤波器的输出信号,
[0358]
在假设所述第一信号被输入至所述第二滤波器的情况下从所述第二滤波器输出的第五信号中包含的第一振动整流误差、与在假设所述第二信号被输入至所述第二滤波器的情况下从所述第二滤波器输出的第六信号中包含的第二振动整流误差的极性不同。
[0359]
在该振动整流误差校正装置中,在频率δσ调制信号与第五信号及第六信号的关系中产生非线性特性。并且,通过使第一定时信号的延迟量与第二定时信号的延迟量不同,使得频率δσ调制信号与第五信号的关系的非线性特性、和频率δσ调制信号与第六信号的关系的非线性特性的程度不同。因此,根据该振动整流误差校正装置,通过使用第一定时信号的延迟量和第二定时信号的延迟量被设定为适当的值的第一信号和第二信号,以使第五信号中包含的第一振动整流误差与第六信号中包含的第二振动整流误差的极性不同,从而使振动整流误差的校正分辨率提高,因而能够有效地减少第四信号中包含的振动整流误差。
[0360]
在所述振动整流误差校正装置的一方式中,也可以是:
[0361]
所述第一滤波器被输入所述第一频率δσ调制信号,并与所述第一被测定信号同步地进行动作,
[0362]
所述第一定时控制电路中被输入所述第一滤波器的输出信号。
[0363]
所述振动整流误差校正装置的一方式,
[0364]
也可以具备第二定时控制电路,所述第二定时控制电路根据所述基准信号的脉冲数的计数值生成使所述第一被测定信号延迟后的第二定时信号,并与所述第二定时信号同步地控制输出被输入的信号的定时,
[0365]
所述第二定时控制电路中被输入所述第一滤波器的输出信号,
[0366]
所述第二滤波器被输入基于第一信号和第二信号的第三信号并输出第四信号,所述第一信号基于所述第一定时控制电路的输出信号,所述第二信号基于所述第二定时控制电路的输出信号,
[0367]
在假设所述第一信号被输入至所述第二滤波器的情况下从所述第二滤波器输出的第五信号中包含的第一振动整流误差、与在假设所述第二信号被输入至所述第二滤波器
的情况下从所述第二滤波器输出的第六信号中包含的第二振动整流误差的极性不同。
[0368]
在该振动整流误差校正装置中,在频率δσ调制信号与第五信号及第六信号的关系中产生非线性特性。并且,通过使第一定时信号的延迟量与第二定时信号的延迟量不同,使得频率δσ调制信号与第五信号的关系的非线性特性、和频率δσ调制信号与第六信号的关系的非线性特性的程度不同。因此,根据该振动整流误差校正装置,通过使用第一定时信号的延迟量和第二定时信号的延迟量被设定为适当的值的第一信号和第二信号,以使第五信号中包含的第一振动整流误差与第六信号中包含的第二振动整流误差的极性不同,从而使振动整流误差的校正分辨率提高,因而能够有效地减少第四信号中包含的振动整流误差。
[0369]
在所述振动整流误差校正装置的一方式中,也可以是:
[0370]
所述振动整流误差校正装置生成基于第一信号和第二信号的第三信号,所述第一信号具有基于所述第二滤波器的输出信号的第一群延迟量,所述第二信号具有基于所述第二滤波器的与所述第一群延迟量不同的第二群延迟量,
[0371]
所述第一信号中包含的第一振动整流误差和所述第二信号中包含的第二振动整流误差的极性不同。
[0372]
在该振动整流误差校正装置中,在频率δσ调制信号与基于第二滤波器的输出信号的第一信号及基于第二滤波器的输出信号的第二信号的关系中产生非线性特性。并且,通过使第一信号具有的第一群延迟量与第二信号具有的第二群延迟量不同,使得频率δσ调制信号与第一信号的关系的非线性特性、和频率δσ调制信号与第二信号的关系的非线性特性的程度不同。因此,根据该振动整流误差校正装置,通过使用第一群延迟量和第二群延迟量被设定为适当的值的第一信号和第二信号,以使第一信号中包含的第一振动整流误差与第二信号中包含的第二振动整流误差的极性不同,从而使振动整流误差的校正分辨率提高,因而能够有效地减少第三信号中包含的振动整流误差。
[0373]
所述振动整流误差校正装置的一方式,
[0374]
也可以具有第一动作模式和第二动作模式,所述第一动作模式中测定所述第一被测定信号与所述基准信号的频率比,所述第二动作模式中所述第二滤波器的截止频率比所述第一动作模式低。
[0375]
在该振动整流误差校正装置中,在第一动作模式下能够得到第二滤波器的输出信号中包含的振动整流误差的减少效果。另一方面,在第二动作模式中,由于第二滤波器的截止频率比第一动作模式低,因而第二滤波器的输出信号中包含的振动整流误差被增强。因此,根据该振动整流误差校正装置,在第二动作模式中,通过在变更第一定时信号的延迟量的同时获取第二滤波器的输出信号,从而得到表示第一定时信号的延迟量与振动整流误差的关系的信息。振动整流误差校正装置或者外部装置通过使用该信息,例如能够算出输出被测定信号的传感器的结构谐振的频率,并根据该结构谐振的频率判定传感器的灵敏度是否在规格内。
[0376]
所述振动整流误差校正装置的一方式,也可以具备:
[0377]
第二频率δσ调制电路,使用第二被测定信号对所述基准信号进行频率δσ调制,生成第二频率δσ调制信号;
[0378]
第四滤波器,与所述第二被测定信号同步地进行动作;
[0379]
第五滤波器,与所述基准信号同步地进行动作;以及
[0380]
第三定时控制电路,根据所述基准信号的脉冲数的计数值生成使所述第二被测定信号延迟后的第三定时信号,并与所述第三定时信号同步地控制输出被输入的信号的定时,
[0381]
所述第四滤波器及所述第三定时控制电路设置于从所述第二频率δσ调制电路的输出至所述第五滤波器的输入为止的信号路径。
[0382]
在该振动整流误差校正装置中,第一被测定信号传输至第二滤波器的输出为止的信号路径的群延迟量恒定,第二被测定信号传输至第五滤波器的输出为止的信号路径的群延迟量也是恒定的。因此,从输入第一被测定信号起至从第二滤波器输出对应的信号为止的时间与从输入第二被测定信号起至从第五滤波器输出对应的信号为止的时间大致相同。因此,根据该振动整流误差校正装置,能够在使针对第一被测定信号的测定和针对第二被测定信号的测定的定时一致的同时校正振动整流误差。
[0383]
传感器模块的一方式具备:
[0384]
所述振动整流误差校正装置的一方式;以及
[0385]
物理量传感器,
[0386]
所述第一被测定信号是基于所述物理量传感器的输出信号的信号。
[0387]
根据该传感器模块,通过具备振动整流误差校正装置,能够在保持群延迟量固定的状态下校正基于物理量传感器的输出信号的测定值的振动整流误差,因而测定精度提高。
[0388]
传感器模块的另一方式具备:
[0389]
所述振动整流误差校正装置的一方式;
[0390]
第一物理量传感器;以及
[0391]
第二物理量传感器,
[0392]
所述第一被测定信号是基于所述第一物理量传感器的输出信号的信号,
[0393]
所述第二被测定信号是基于所述第二物理量传感器的输出信号的信号。
[0394]
根据该传感器模块,通过具备振动整流误差校正装置,能够在保持群延迟量固定的状态下校正基于第一物理量传感器的输出信号的测定值的振动整流误差以及基于第二物理量传感器的输出信号的测定值的振动整流误差,因而测定精度、同步测量的精度提高。
[0395]
振动整流误差校正方法的一方式包括如下工序:
[0396]
使用被测定信号对基准信号进行频率δσ调制,生成频率δσ调制信号的工序;
[0397]
根据所述基准信号的脉冲数的计数值生成使所述被测定信号延迟后的定时信号,并与所述定时信号同步地控制输出基于所述频率δσ调制信号的信号的定时的工序;
[0398]
与所述定时信号同步地对基于被控制了所述定时的所述信号的信号进行第一滤波处理的工序;以及
[0399]
与所述基准信号同步地对基于通过所述第一滤波处理得到的信号的信号进行第二滤波处理的工序。
[0400]
在该振动整流误差校正方法中,由于与使被测定信号延迟后的定时信号同步地进行第一滤波处理,与不同于被测定信号的基准信号同步地进行第二滤波处理,因此,在频率δσ调制信号与第二滤波器的输出信号的关系中产生非线性特性。并且,因为该非线性特
性产生的振动整流误差根据定时信号的延迟量而变化。因此,通过将定时信号的延迟量设定为适当的值,从而使因为该非线性特性产生的振动整流误差和因为被测定信号的非对称性产生的振动整流误差相互抵消,第二滤波器的输出信号中包含的振动整流误差被减少。另外,由于是对输出基于频率δσ调制信号的信号的定时进行控制以校正振动整流误差,而不是对基于频率δσ调制信号的信号的延迟量进行控制,因此,被测定信号传输至第二滤波器的输出为止的信号路径的群延迟量恒定。因此,根据该振动整流误差校正方法,能够在保持群延迟量固定的状态下校正振动整流误差。
[0401]
振动整流误差校正方法的另一方式包括如下工序:
[0402]
使用被测定信号对基准信号进行频率δσ调制,生成频率δσ调制信号;
[0403]
与所述被测定信号同步地对基于所述频率δσ调制信号的信号进行第一滤波处理的工序;
[0404]
根据所述基准信号的脉冲数的计数值生成使所述被测定信号延迟后的定时信号,并与所述定时信号同步地控制输出基于通过所述第一滤波处理得到的信号的信号的定时的工序;以及
[0405]
与所述基准信号同步地对基于被控制了所述定时的所述信号的信号进行第二滤波处理的工序。
[0406]
在该振动整流误差校正方法中,由于与被测定信号同步地进行第一滤波处理,与不同于被测定信号的基准信号同步地进行第二滤波,因此,在频率δσ调制信号与第二滤波器的输出信号的关系中产生非线性特性。并且,因为该非线性特性产生的振动整流误差根据定时信号的延迟量而变化。因此,通过将定时信号的延迟量设定为适当的值,从而使因为该非线性特性产生的振动整流误差和因为被测定信号的非对称性产生的振动整流误差相互抵消,第二滤波器的输出信号中包含的振动整流误差被减少。另外,由于是对输出基于频率δσ调制信号的信号的定时进行控制以校正振动整流误差,而不是对基于频率δσ调制信号的信号的延迟量进行控制,因此,被测定信号传输至第二滤波器的输出为止的信号路径的群延迟量恒定。因此,根据该振动整流误差校正方法,能够在保持群延迟量固定的状态下校正振动整流误差。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。