1.本发明涉及智能系统导航测量领域,尤其涉及一种阵列式传感器的现场快速标定方法。
背景技术:
2.随着科学技术的快速发展,无论是智能车、无人机,还是高精尖的精准打击武器,其研发都离不开惯导系统。惯导系统为智能化、自动化机械的导航定位提供精确的姿态位置信息,其中,mems惯性器件以其成本低、体积小、重量轻和易批量生产的特点,在各行各业发挥关键作用。
3.惯导系统的使用离不开预先的标定。传统的标定方法都是以安装基准面为基准,基于速率位置转台进行标定,主要完成零位和标度因数的标定,其中安装误差只与初始相对位置关系有关,标定完成后一般安装误差参数稳定性较好,但零位和标度因数参数稳定性较差。随着出厂时间延长,mems惯性器件的零位和标度因数的参数保持能力较差,这会导致mems惯性器件的性能劣化,因此,需要一种简易的现场标定方法,快速对参数进行标定。
4.阵列式传感器的现场快速标定技术,不仅有利于校正imu传感器的各类参数,提高导航精度,更重要的是能够大幅降低现场使用难度。关于阵列式传感器的现场标定技术的研究,不仅有利于自动驾驶领域,在阵列式传感器的导航测量的相关领域都将受益。因此,阵列式传感器的现场快速标定技术的研究至关重要。
技术实现要素:
5.有鉴于此,本发明提供了一种阵列式传感器的现场快速标定方法,用以在产品使用现场对阵列式传感器进行快速标定,校正传感器残余误差,降低现场使用难度。
6.本发明提供的一种阵列式传感器的现场快速标定方法,包括如下步骤:
7.s1:将阵列式传感器翻转至少6个不同位置,同时利用阵列式传感器在每个位置进行静态采样第一预设时长,得到静态采样数据;其中,翻转的位置保证阵列式传感器内所有传感器的x轴、y轴和z轴上都有加速度投影分量;
8.s2:将阵列式传感器自由旋转,同时利用阵列式传感器进行动态采样第二预设时长,得到动态采样数据;其中,自由旋转保证阵列式传感器内所有传感器的x轴、y轴和z轴上都有角速度投影分量;
9.s3:从静态采样数据中分别选取待标定传感器在x轴、y轴和z轴的加速度最大的数据,利用选取的数据以及静态采样数据中除待标定传感器外的其他传感器的加速度数据,计算待标定传感器的加速度计的零偏和标度因数;利用动态采样数据中除待标定传感器外的其他传感器的角速度数据,计算待标定传感器的陀螺的零偏和标度因数;重复步骤s3,直至遍历完阵列式传感器内的所有传感器;
10.s4:对阵列式传感器内所有传感器的加速度计和陀螺的零偏进行检验,对阵列式传感器内所有传感器的加速度计和陀螺的标度因数进行检验。
11.在一种可能的实现方式中,在本发明提供的上述阵列式传感器的现场快速标定方法中,步骤s1中,将阵列式传感器翻转至少6个不同位置,具体包括:
12.将阵列式传感器翻转至所有传感器的x轴竖直向上,将阵列式传感器翻转至所有传感器的x轴竖直向下,将阵列式传感器翻转至所有传感器的y轴竖直向上,将阵列式传感器翻转至所有传感器的y轴竖直向下,将阵列式传感器翻转至所有传感器的z轴竖直向上,将阵列式传感器翻转至所有传感器的z轴竖直向下。
13.在一种可能的实现方式中,在本发明提供的上述阵列式传感器的现场快速标定方法中,步骤s1中,第一预设时长至少为3min。
14.在一种可能的实现方式中,在本发明提供的上述阵列式传感器的现场快速标定方法中,步骤s2中,第二预设时长至少为3min。
15.在一种可能的实现方式中,在本发明提供的上述阵列式传感器的现场快速标定方法中,步骤s3,从静态采样数据中分别选取待标定传感器在x轴、y轴和z轴的加速度最大的数据,利用选取的数据以及静态采样数据中除待标定传感器外的其他传感器的加速度数据,计算待标定传感器的加速度计的零偏和标度因数;利用动态采样数据中除待标定传感器外的其他传感器的角速度数据,计算待标定传感器的陀螺的零偏和标度因数,具体包括:
16.假设阵列式传感器包括n 1个传感器,针对第p个待标定传感器的x轴、y轴和z轴的陀螺或加速度计的测量方程为:
[0017][0018]
其中,i
real
‑
x
、i
real
‑
y
和i
real
‑
z
分别表示待标定传感器的x轴、y轴和z轴的带量纲理论值,由除待标定传感器外的其他n个传感器通过卡尔曼滤波器融合确定;测量值sensor
px
、sensor
py
和sensor
pz
分别表示待标定传感器的x轴、y轴和z轴的不带量纲的输出数字量;sf
p
x、sf
p
y和sf
p
z分别表示第p个待标定传感器的x轴、y轴和z轴的标度因数,b
p
表示第p个待标定传感器的零偏,v
p
表示第p个待标定传感器的残余误差;
[0019]
对于除待标定传感器外的其他n个传感器组成的mems阵列有量测方程和观测方程如下:
[0020][0021]
z(t)=h
·
ω v(t)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0022]
其中,x(t)表示卡尔曼滤波器的状态变量,状态变量为真实加速度或真实角速度,状态变量为1维;z(t)表示除待标定传感器外的其他n个传感器的输出值;h为测量矩阵,表示各传感器和载体系之间的转换关系;ω表示真实加速度或真实角速度,n
ω
表示一个均值为0、方差为q
ω
的白噪声;f为零矩阵,ω(t)为过程噪声,v(t)为观测噪声;
[0023]
卡尔曼滤波方程为:
[0024][0025]
k(t)=p(t)h
t
r
‑1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0026][0027]
其中,k(t)表示卡尔曼滤波器随时间的增益变化,p(t)表示卡尔曼滤波器随时间的估计误差变化;r是测量噪声的协方差矩阵,表示为:
[0028][0029]
其中,q
n
表示待标定传感器的arw噪声的方差,ρ表示阵列式传感器的互相关系数;
[0030]
k(t)迭代收敛至一个固定值,由下式得到:
[0031]
c=h
t
r
‑1h
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
[0032][0033]
其中,k
∞
表示卡尔曼滤波器的增益经过迭代的收敛值,p
∞
表示卡尔曼滤波器的估计误差经过迭代的收敛值;
[0034]
使用k(t)得到连续时间的卡尔曼滤波状态变量的估计为:
[0035][0036]
对连续时间的卡尔曼滤波状态变量进行离散化处理,使用零阶保持,假设加速度或角速度在整个采样周期内为常值,得到:
[0037][0038]
其中,t0表示采样间隔,表示由除待标定传感器外的其他n个传感器组成的虚拟传感器的陀螺或加速度计的输出,z
k 1
表示除待标定传感器外的其他n个传感器的原始输出;利用待标定传感器的输出与虚拟传感器的关系进行线性最小二乘拟合,得到待标定传感器的零偏和标度因数:
[0039][0040]
其中,表示待标定传感器的标度因数,表示待标定传感器的零偏。
[0041]
在一种可能的实现方式中,在本发明提供的上述阵列式传感器的现场快速标定方法中,步骤s4,对阵列式传感器内所有传感器的加速度计和陀螺的零偏进行检验,对阵列式传感器内所有传感器的加速度计和陀螺的标度因数进行检验,具体包括:
[0042]
s41:将阵列式传感器静置,采集阵列式传感器内每个传感器的加速度计输出值和陀螺输出值,利用每个传感器的加速度计输出值的平方和等于重力加速度来检验加速度计的零偏的标定效果,利用每个传感器的陀螺输出值为零来检验陀螺的零偏的标定效果;
[0043]
s42:将阵列式传感器自由旋转后放回原位,通过对加速度计和陀螺进行导航解
算,检验加速度计和陀螺的标度因数的标定效果。
[0044]
本发明提供的上述阵列式传感器的现场快速标定方法,属于智能系统导航测量领域,将阵列内除待标定传感器外的n个传感器构成一个虚拟高精度传感器,对待标定传感器进行标定,利用静态采样数据标定阵列内加速度计的参数,利用动态采样数据标定阵列内陀螺的参数,并对标定结果进行检验以判断标定效果。上述方法可以实现在任务现场实时对阵列式传感器进行快速标定,通过静态测试和动态测试结合的方法,利用阵列式传感器的相关性,采用最小二乘拟合的方法估计最优的标定参数,校正imu的零偏和标度因数,可以显著提高导航精度,大幅降低阵列式传感器的现场使用难度,通过对标定结果进行检验可以确保标定的可靠性。
附图说明
[0045]
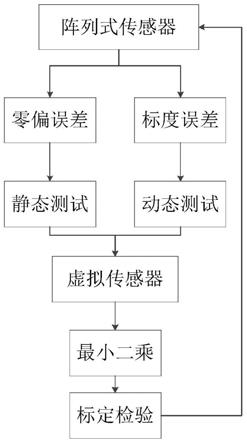
图1为本发明实施例1提供的一种阵列式传感器的现场快速标定方法的流程示意图;
[0046]
图2为包含零偏和标度因数误差的传感器原始输出图;
[0047]
图3为利用传感器轨迹发生器生成如图2所示的原始数据的原理图;
[0048]
图4为补偿后的传感器输出图;
[0049]
图5为单轴传感器的噪声模型图;
[0050]
图6为阵列式传感器的卡尔曼滤波流程图。
具体实施方式
[0051]
下面将结合本发明实施方式中的附图,对本发明实施方式中的技术方案进行清楚、完整的描述,显然,所描述的实施方式仅仅是作为例示,并非用于限制本发明。
[0052]
本发明提供的一种阵列式传感器的现场快速标定方法,包括如下步骤:
[0053]
s1:将阵列式传感器翻转至少6个不同位置,同时利用阵列式传感器在每个位置进行静态采样第一预设时长,得到静态采样数据;其中,翻转的位置保证阵列式传感器内所有传感器的x轴、y轴和z轴上都有加速度投影分量;
[0054]
s2:将阵列式传感器自由旋转,同时利用阵列式传感器进行动态采样第二预设时长,得到动态采样数据;其中,自由旋转保证阵列式传感器内所有传感器的x轴、y轴和z轴上都有角速度投影分量;
[0055]
s3:从静态采样数据中分别选取待标定传感器在x轴、y轴和z轴的加速度最大的数据,利用选取的数据以及静态采样数据中除待标定传感器外的其他传感器的加速度数据,计算待标定传感器的加速度计的零偏和标度因数;利用动态采样数据中除待标定传感器外的其他传感器的角速度数据,计算待标定传感器的陀螺的零偏和标度因数;重复步骤s3,直至遍历完阵列式传感器内的所有传感器;
[0056]
s4:对阵列式传感器内所有传感器的加速度计和陀螺的零偏进行检验,对阵列式传感器内所有传感器的加速度计和陀螺的标度因数进行检验。
[0057]
下面通过一个具体的实施例对本发明提供的上述阵列式传感器的现场快速标定方法的具体实施进行详细说明。
[0058]
实施例1:
[0059]
以mems(micro
‑
electro
‑
mechanical system)阵列为例,首先对mems阵列内的子imu中的某个单轴传感器进行建模,对于第p个子imu的第q轴传感器的加速度计或陀螺,传感器的模型公式如下:
[0060][0061]
其中,x
m
、y
m
、z
m
分别表示选择的载体坐标系的x轴、y轴、z轴的真实加速度或角速度;h矩阵为载体坐标系转化为子imu坐标系的变换矩阵,h矩阵在mems阵列构型确定并安装至载体时就已确定为已知;sensor
p
表示不带量纲的第p个子传感器测量值数字量;表示第p个子imu的第q轴传感器的零偏,表示第p个子imu的第q轴传感器的随机噪声。
[0062]
由于阵列式传感器在静置时可以敏感到重力作为已知激励,因此可以利用重力作为基准对阵列式传感器的加速度计的零偏和标度因数进行标定。由于地球自转角速度对于mems陀螺来说是一个无法敏感到的小量,因此需要额外提供外部激励来对mems阵列的陀螺进行标定,具体可以采用手持mems阵列转动的方法对mems阵列施加角速度激励。
[0063]
在利用重力激励对mems阵列内的加速度计进行标定时需要对x、y、z三轴均施加重力激励,由于方程(1)中包含6个未知量,即x、y、z三轴传感器的加速度计的零偏和标度,故需对mems阵列翻转6个不同的位置进行imu采样,随后通过解方程组(由每个传感器的每个轴的方程组成)得到mems阵列的加速度计的各标定参数。对于陀螺而言,需要手持mems阵列进行自由旋转,该旋转仅需保证mems阵列内的所有传感器的x、y、z三轴都能够敏感到角速度即可。
[0064]
如图1所示,具体步骤如下:
[0065]
第一步:将阵列式传感器翻转至少6个不同位置,同时利用阵列式传感器在每个位置进行静态采样第一预设时长,得到静态采样数据;其中,翻转的位置需要保证阵列式传感器内所有传感器的x轴、y轴和z轴上都有加速度投影分量。
[0066]
具体地,将阵列式传感器翻转至少6个不同位置,可以通过以下方式来实现:将阵列式传感器翻转至所有传感器的x轴竖直向上,将阵列式传感器翻转至所有传感器的x轴竖直向下,将阵列式传感器翻转至所有传感器的y轴竖直向上,将阵列式传感器翻转至所有传感器的y轴竖直向下,将阵列式传感器翻转至所有传感器的z轴竖直向上,将阵列式传感器翻转至所有传感器的z轴竖直向下。第一预设时长至少为3min。
[0067]
第二步:将阵列式传感器自由旋转,同时利用阵列式传感器进行动态采样第二预设时长,得到动态采样数据;其中,自由旋转保证阵列式传感器内所有传感器的x轴、y轴和z轴上都有角速度投影分量。
[0068]
具体地,可以手持阵列式传感器自由旋转,第二预设时长至少为3min。
[0069]
第三步:从静态采样数据中分别选取待标定传感器在x轴、y轴和z轴的加速度最大的数据,利用选取的数据以及静态采样数据中除待标定传感器外的其他传感器的加速度数据,计算待标定传感器的加速度计的零偏和标度因数;利用动态采样数据中除待标定传感器外的其他传感器的角速度数据,计算待标定传感器的陀螺的零偏和标度因数。
[0070]
具体地,假设阵列式传感器包括n 1个传感器,针对第p个待标定传感器的x轴、y轴
和z轴的陀螺或加速度计的测量方程可以为:
[0071][0072]
其中,i
real
‑
x
、i
real
‑
y
和i
real
‑
z
分别表示待标定传感器的x轴、y轴和z轴的带量纲理论值,由除待标定传感器外的其他n个传感器通过卡尔曼滤波器融合确定;测量值sensor
px
、sensor
py
和sensor
pz
分别表示待标定传感器的x轴、y轴和z轴的不带量纲的输出数字量;sf
p
x、sf
p
y和sf
p
z分别表示第p个待标定传感器的x轴、y轴和z轴的标度因数,b
p
表示第p个待标定传感器的零偏,v
p
表示第p个待标定传感器的残余误差。
[0073]
在获得6个位置的静态采样数据后,首先对mems阵列内的第1个传感器的加速度计进行标定,随后依次对后面n个传感器的加速度计进行标定。以mems阵列内第一个传感器的x轴的加速度计为例,从这6组数据中选出第1个传感器的x轴的加速度计平均输出最大的2组数据作为x轴的加速度计标定的数据组,通过其他n个传感器的加速度计组成的虚拟加速度计对待标定的加速度计进行零偏和标度因数校正。对于陀螺而言,在获得动态自由旋转的陀螺数据后,首先对第1个传感器的陀螺进行标定,随后依次对后面n个传感器的陀螺进行标定,以mems阵列内第一个传感器的x轴陀螺为例,通过其他n个传感器的陀螺组成的虚拟陀螺对待标定的加速度计进行零偏和标度因数校正。
[0074]
对于除待标定传感器外的其他n个传感器组成的mems阵列有量测方程和观测方程如下:
[0075][0076]
z(t)=h
·
ω v(t)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0077]
其中,x(t)表示卡尔曼滤波器的状态变量,状态变量为真实加速度或真实角速度,状态变量为1维;z(t)表示除待标定传感器外的其他n个传感器的输出值;h为测量矩阵,表示各传感器和载体系之间的转换关系;ω表示真实加速度或真实角速度,n
ω
表示一个均值为0、方差为q
ω
的白噪声;f为零矩阵,ω(t)为过程噪声,v(t)为观测噪声。
[0078]
卡尔曼滤波方程可以表示为:
[0079][0080]
k(t)=p(t)h
t
r
‑1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0081][0082]
其中,k(t)表示卡尔曼滤波器随时间的增益变化,p(t)表示卡尔曼滤波器随时间的估计误差变化;r是测量噪声的协方差矩阵,r矩阵不是对角线矩阵,因为不同的mems传感器之间存在相关性,r矩阵表示为:
[0083][0084]
其中,q
n
表示待标定传感器的arw噪声的方差,ρ表示阵列式传感器的互相关系数。
[0085]
由于该卡尔曼滤波系统完全是可观测的,因此,k(t)迭代收敛至一个固定值,可以由下式得到:
[0086]
c=h
t
r
‑1h
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(9)
[0087][0088]
其中,k
∞
表示卡尔曼滤波器的增益经过迭代的收敛值,p
∞
表示卡尔曼滤波器的估计误差经过迭代的收敛值。
[0089]
使用k(t)得到连续时间的卡尔曼滤波状态变量的估计为:
[0090][0091]
对连续时间的卡尔曼滤波状态变量进行离散化处理,使用零阶保持,假设加速度或角速度在整个采样周期内为常值,可以得到:
[0092][0093]
其中,t0表示采样间隔,表示由除待标定传感器外的其他n个传感器组成的虚拟传感器的陀螺或加速度计的输出,z
k 1
表示除待标定传感器外的其他n个传感器的原始输出;利用待标定传感器的输出与虚拟传感器的关系进行线性最小二乘拟合,得到待标定传感器的零偏和标度因数:
[0094][0095]
其中,表示待标定传感器的标度因数,表示待标定传感器的零偏。
[0096]
重复上述第三步,直至遍历完阵列式传感器内的所有传感器。
[0097]
第四步:对阵列式传感器内所有传感器的加速度计和陀螺的零偏进行检验,对阵列式传感器内所有传感器的加速度计和陀螺的标度因数进行检验。
[0098]
具体地,将阵列式传感器静置,采集阵列式传感器内每个传感器的加速度计输出值和陀螺输出值,利用每个传感器的加速度计输出值的平方和等于重力加速度来检验加速度计的零偏的标定效果,利用每个传感器的陀螺输出值为零来检验陀螺的零偏的标定效果;然后,将阵列式传感器自由旋转后放回原位,通过对加速度计和陀螺进行导航解算,检验加速度计和陀螺的标度因数的标定效果。
[0099]
图2以x轴方向的陀螺输出值为例,仿真生成4轴陀螺数据。然后,通过matlab软件,设置mems阵列内陀螺的角度随机游走arw参数为0.0833
°
/(h^(1/2)),速率随机游走rrw参数为600
°
/(h^(3/2)),输入角速率为零,按照如图3所示的轨迹发生器生成18000s的传感器原始数据,采样间隔设置为10ms,并在其中加入零偏和标度因数误差。图4为经过标定后的陀螺输出值,从图4可以看出,通过仿真生成的阵列内4只陀螺的数据,再经过标定得到传感
器的残余零偏和标度因数,经过补偿后的角速度误差的峰峰值从1
°
/s下降到了0.3
°
/s,说明传感器的精度得到明显提升。
[0100]
图5为单轴传感器噪声模型图,图5中t为传感器采样周期,每个单轴传感器的输出都可以建模为真实角速度、角度随机游走arw和角速率随机游走rrw的组合,这三个参数可由图5中的转换关系统一至同一个单位(deg/s)下。
[0101]
图6为阵列传感器的卡尔曼滤波流程图,通过图6所示的方法,每次采样后的迭代均可得到当前时刻标定基准虚拟传感器的输出。
[0102]
本发明提供的上述阵列式传感器的现场快速标定方法,属于智能系统导航测量领域,将阵列内除待标定传感器外的n个传感器构成一个虚拟高精度传感器,对待标定传感器进行标定,利用静态采样数据标定阵列内加速度计的参数,利用动态采样数据标定阵列内陀螺的参数,并对标定结果进行检验以判断标定效果。上述方法可以实现在任务现场实时对阵列式传感器进行快速标定,通过静态测试和动态测试结合的方法,利用阵列式传感器的相关性,采用最小二乘拟合的方法估计最优的标定参数,校正imu的零偏和标度因数,可以显著提高导航精度,大幅降低阵列式传感器的现场使用难度,通过对标定结果进行检验可以确保标定的可靠性。
[0103]
显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。