运载工具位置准确度增强系统
1.本技术要求2021年1月11日提交的与本技术标题相同的印度临时专利申请序列号202111001201的优先权,该申请全文以引用方式并入本文。
背景技术:
2.随着运载工具操作变得越来越自动化,对运载工具当前位置进行准确确定对于安全运载工具操作至关重要。用于确定位置的位置确定系统的一个示例是包括全球定位系统(gps)的全球导航卫星系统(gnss)。gps包括多个卫星,这些卫星生成由运载工具处的gps接收器进行感测的卫星信号。基于从多个卫星接收到的信号,gps接收器确定运载工具位置。用于确定运载工具位置的位置确定系统的另一个示例是惯性导航系统(ins)。ins使用运动传感器和旋转传感器,这些传感器可用于航位推算以确定位置。另一可行的运载工具位置确定系统是使用5g网络的位置确定系统。5g位置确定系统对于无人飞行器系统(uas)具有特别适用性,诸如城市空中移动性(uam)或无人驾驶飞行器(uav)。
3.基于操作条件、系统所用数据误差或系统所用装置的局限性,位置确定系统可能在准确度方面具有局限性。因此,期望增强了位置确定系统所提供的位置解决方案的准确度的系统。
技术实现要素:
4.以下发明内容是以举例的方式而不是限制的方式作出的。提供发明内容的目的仅仅是有助于读者理解所述主题的一些方面。多个实施方案提供了通过如下方式生成的测绘位置解决方案的用途:将用数字有源相控阵列雷达系统生成的地形测绘图与地形数据库进行比较。多个实施方案使用测绘位置解决方案来扩充其它位置解决方案,校准其它位置确定系统,更新地形数据库,确定增强准确度的模式,生成用于行进的替代路点等。
5.在一个实施方案中,提供了一种运载工具位置准确度增强系统。该系统包括至少一个位置确定系统、至少一个数字有源相控阵列雷达、至少一个存储器和至少一个控制器。至少一个位置确定系统被配置成生成传感器位置解决方案。至少一个数字有源相控阵列雷达被配置成生成包括地形海拔信息的测绘地形。至少一个存储器用于存储至少地形数据库和操作指令。至少一个控制器与至少一个位置确定系统、至少一个数字有源相控阵列雷达和至少一个存储器通信。至少一个控制器被配置成实施该存储器中的操作指令,以进行以下两项之间的测绘图匹配从而确定测绘位置解决方案:来自至少一个数字有源相控阵列雷达的所生成测绘地形和地形数据库中的地形海拔测绘图信息。至少一个控制器被进一步配置成:至少用测绘位置解决方案来扩充来自至少一个位置确定系统的传感器位置解决方案,以增强传感器位置解决方案的准确度。此外,至少一个位置确定系统包括全球导航卫星系统(gnss)。至少一个控制器被配置成:基于测绘位置解决方案,确定gnss中的位置误差;并且广播所确定的位置误差。
6.在另一个示例性实施方案中,提供了一种增强运载工具位置确定系统准确度的方法。该方法包括:使用数字有源相控阵列雷达来生成包括海拔信息的测绘地形;将测绘地形
与地形数据库中的地形海拔信息进行比较;当发现测绘地形与地形数据库中的地形海拔信息存在匹配时,确定测绘位置解决方案;将测绘位置解决方案与来自全球导航卫星系统(gnss)接收器的至少一个传感器位置解决方案进行比较;基于测绘位置解决方案与来自gnss接收器的传感器位置解决方案的比较,确定位置误差是否存在于来自gnss接收器的传感器位置解决方案中;并且广播所确定的位置误差。
7.在又一实施方案中,提供了另一增强运载工具位置确定系统准确度的方法。该方法包括:用数字有源相控阵列来生成包括海拔信息的测绘地形;监测测绘地形中的海拔解决方案的地形测绘图变化;并且当测绘地形中的海拔信息并未提供足够的测绘图变化时,生成用于运载工具行进的替代路点,以在将测绘地形与地形数据库中的地形海拔信息进行匹配时,区分当前运载工具位置。
附图说明
8.当根据具体实施方式和如下附图考虑时,实施方案可以更容易地理解并且实施方案的进一步的优点和用途将更为显而易见,在附图中:
9.图1是根据一个示例性实施方案的运载工具位置准确度增强系统的框图;
10.图2是根据一个示例性实施方案的使用中的运载工具位置准确度增强系统的图示;
11.图3是根据一个示例性实施方案的运载工具位置准确度增强系统流程图;
12.图4是根据一个示例性实施方案的校准传感器流程图;
13.图5是根据一个示例性实施方案的更新地形流程图;
14.图6是根据一个示例性实施方案的替代路点流程图;并且
15.图7是根据一个示例性实施方案的模式实施流程图。
16.根据惯例,各种所述的特征未按比例绘制,而是为了强调与所述主题相关的特定特征而绘制的。参考符号在所有附图和正文中表示类似的元件。
具体实施方式
17.在下面的具体实施方式中,参照了附图,这些附图构成具体实施方式的一部分,并且在这些附图中,以说明的方式示出了可实施本发明的具体实施方案。对这些实施方案进行了充分详细地描述,以使本领域技术人员能够实施这些各种实施方案,并且应当理解,可以利用其他实施方案并且可以在不脱离本发明的实质和范围的情况下进行变化。因此,以下具体实施方式不是限制性的,并且本发明的范围仅由权利要求书以及其等同物限定。
18.用于确定运载工具当前位置的系统可使用多于一个位置确定系统来帮助校正一个系统中的可能误差或在主要位置确定解决方案不可用时提供备用位置解决方案。例如,gps可能具有误差,这些误差可能造成所分配的行进路径中的漂移。另一位置系统可用于校正或减少在gps接收器处确定的位置解决方案中的漂移误差。在uam/uav示例中,5g位置确定系统可以是主要位置确定系统或主要位置准确度确定系统。如果在任何5g链路或gps中发生故障,那么来自ins接收器的位置解决方案可能不足以实现uam/uav的准确导航和着陆。
19.多个实施方案提供了一种运载工具位置准确度增强系统,其通过如下方式补充并
增强位置确定系统,诸如但不限于gnss、ins、5g系统等:使用数字有源相控阵列(dapa)雷达系统和地形数据库来提供可用作位置解决方案的附加信息。该所生成测绘位置解决方案可用于导航并增强或甚至校准现有位置确定系统。dapa是相控阵列雷达设计,其具有电子偏转声束以检测物体,诸如地形。一个dapa可以在方位角方向上提供120度的覆盖范围。可以用多个dapa设备获得360度的覆盖范围。在一个示例性实施方案中,运载工具位置准确度增强系统至少部分地用于广播gnss中的确定位置(方位)误差,以供其它运载工具中的其它位置确定系统使用。多个实施方案可用于需要确定运载工具方位/位置的任何类型的空中、太空、陆上和水上运载工具中。
20.在一些实施方案中,地形数据库用gps(/ins)海拔、纬度、经度和dapa海拔实时构建。另外,多个实施方案向数据库中的海拔测绘图信息提供置信度水平,以确保准确的海拔测绘图匹配。
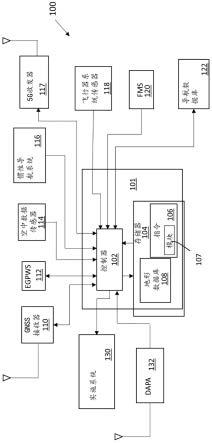
21.参见图1,示出了运载工具位置准确度增强系统100的示例。运载工具位置准确度增强系统100包括控制系统101。控制系统101包括至少一个控制器102和至少一个存储器104。一般来讲,控制器102(或至少一个控制器102)可包括以下任何一项或多项:处理器、微处理器、数字信号处理器(dsp)、专用集成电路(asic)、现场可编程门阵列(fpga)或等效的分立或集成逻辑电路。在一些示例性实施方案中,控制器102可包括多个部件,诸如一个或多个微处理器、一个或多个控制器、一个或多个dsp、一个或多个asic、一个或多个fpga以及其它分立或集成逻辑电路的任何组合。归因于本文的控制器102的功能可具体体现为软件、固件、硬件或它们的任何组合。控制器102可以为系统控制器或部件控制器的一部分。至少一个存储器104可包括计算机可读操作指令106,当由控制器102执行时,这些指令提供运载工具位置准确度增强系统100的功能。此类功能可包括使用数字有源相控阵列(dapa)雷达132和地形数据库108来确定如下所述的测绘位置解决方案的功能。可将计算机可读指令编码于存储器104内。存储器104可以是合适的非暂态存储介质,或包括任何易失性、非易失性、磁性、光学或电子介质,诸如但不限于:随机存取存储器(ram)、只读存储器(rom)、非易失性ram(nvram)、电可擦除可编程rom(eeprom)、闪存存储器的介质或任何其它存储介质。
22.控制器102与运载工具的多个传感器和系统通信。例如,图1示出了与控制器102通信的gnss接收器110。gnss接收器110被设计成从多个卫星接收卫星信号。在一个示例性实施方案中,gnss接收器110被配置成:基于接收到的卫星信号来确定位置解决方案,并且将运载工具的确定位置解决方案传送到控制器102。
23.图1中也示出了增强型地面接近警告系统(egpw)112、空中数据传感器114、惯性导航系统(ins)116、5g接收器、飞行器系统传感器118、飞行管理系统(fms)120和导航数据库122,它们都与控制器102通信。系统传感器118可包括用于系统的任何数量的不同类型的传感器,诸如但不限于气压传感器、轮上重量传感器、以及用于不同类型的着陆系统的传感器,诸如微波着陆系统(mls)和基于地面的增稳系统着陆系统(gls)。5g收发器117可以是确定控制器102所用位置的5g系统。在一个示例性实施方案中,5g收发器117是具有控制器102的5g方位确定系统的一部分,该控制器实施存储器104中的位置确定指令106。
24.dapa也与控制器102通信。dapa 132提供包括海拔信息的地形雷达图像测绘图(测绘地形)。将测绘地形与地形数据库108中的地形信息进行比较,以基于控制器102实施的指令106来确定运载工具位置(或方位)。地形数据库108可包含位置信息,诸如经度和纬度信
息以及可用于比较地形测绘图以确定位置解决方案的位置处的海拔。图1也示出了实施系统130。实施系统130可包括读出装置以显示所确定的位置。实施系统130可包括自动化运载工具控制系统,该自动化运载工具控制系统至少部分地基于所生成位置解决方案来控制运载工具的操作。此外,实施系统130可包括通信系统以广播gnss误差,如下文进一步所详述。
25.egpws 112是地形觉察与警报系统,该系统提供地形警报并且用其它特征来提供显示功能。egpws 112使用飞行器输入,包括地理方位、纬度、海拔、地面速度、垂直速度和滑翔斜率偏差。这些输入与内部地形、障碍物和地形数据库一起使用,以预测飞行器飞行路径与地形或障碍物之间的潜在冲突。地形或障碍物冲突可导致egpws 112提供视觉和音频警示或警告性警报。
26.存储在至少一个存储器104中的指令106包括预测与检测模块107。控制器102所实施的这些指令提供预测性运载工具位置准确度并检测导航期间的故障。gps故障、ins故障的及时检测通过如下方式实现:基于位置解决方案的比较,在某程度上持续确定数据点是否落在一个实施方案中的一组界限之外。如果数据点落在设定界限之外,则它们被标记为异常现象并且在一个示例性实施方案中进行报告。此外在多个实施方案中,然后实时分析当时数据
27.此外在一个实施方案中,模块指令指示控制器102发现可以帮助预测位置准确度并预防故障的模式。这些指令考虑了以下数据的动态行为模式:与运载工具导航有关的情境数据;以及来自至少gnss接收器110、ins 116、地形数据库108的数据;与位置解决方案有关的5g收发器117信息。输入数据训练或使得模块107提供的机器学习算法能够检测异常现象并且决定使用哪个单项输入或多项输入来提供最准确的导航解决方案。在一个示例性实施方案中,模块中的指令实施回归模型,该回归模型进行预测并且帮助决定可以将哪项传感器输入进行混合以在任何时刻提供最佳位置准确度。此外,可通过使用来自地形数据库108的几个路点(具有显著高度变化的地形/障碍物数据)并且将它们与dapa无线电高度仪海拔数据进行比较,来确定基于地形数据的海拔测绘图。
28.在图2中,提供了集成到运载工具200中的运载工具位置准确度增强系统100的一个示例。在该示例中,运载工具是uam/uav,但是任何类型的需要确定运载工具当前位置的运载工具也可实施运载工具位置准确度增强系统100。运载工具被示出为包括dapa 132,该dapa用于生成地形206的测绘地形204,将测绘地形与地形数据库108中的地形进行比较,以确定运载工具的位置解决方案,可以将该位置解决方案与来自运载工具200所利用的其它传感器位置确定系统(诸如但不限于gnss和5g系统)的其它传感器位置解决方案进行比较。图2中也示出了多个卫星102-1至202-n、以及分别由gnss接收器110和运载工具位置准确度增强系统100的5g接收器所用的多根5g天线。
29.参见图3,示出了示例性实施方案的运载工具位置准确度增强系统流程图300。运载工具位置准确度增强系统流程图300被提供为一系列有序框。在其它实施方案中,框的顺序可以不同,并且可以甚至彼此并行发生。因此,实施方案不限于图3所列的框的顺序。
30.运载工具位置准确度增强系统流程图300的过程始于框(301),其中使用数字有源相控阵列雷达来生成包括海拔信息的测绘地形204。在框(302)处,使用dapa 132将测绘地形204与地形数据库108中存储的地形海拔信息进行比较。如果在框(304)处检测不到匹配,则过程在框(302)(将测绘地形204与地形数据库108中存储的地形进行比较)处继续。如果
在框(304)处检测到匹配,则在框(306)处,基于该匹配来确定运载工具的位置或位置解决方案。
31.然后在框(308)处,确定是否存在来自另一位置确定系统的另一可用位置解决方案。如果不存在另一可用位置解决方案,则在框(310)处系统使用由dapa确定的位置解决方案。这种情况可在其它位置确定系统不工作时发生。在这种情况下,使用来源于dapa 132的测绘位置解决方案。该过程然后在框(302)(将测绘地形204与地形数据库108中存储的地形进行比较)处继续。
32.如果在框(308)处另一位置解决方案可用,则在框(310)处,将基于dapa的位置解决方案(测绘位置解决方案)与传感器位置解决方案进行比较。然后在框(311)处,确定测绘位置解决方案与传感器位置解决方案之间是否存在差异。如果没有差异,则该过程在框(312)处继续。在一个示例性实施方案中,如果存在差异,则在框(312)处确定该差异是否超出所定义的阈值限值。如果在框(312)处该差异超出所定义的阈值,则在框(314)处生成警报,并且该过程在框(302)处继续。如果在框(312)处确定该差异不超过所定义的阈值,则在框(316)处确定与传感器位置确定系统相关的位置误差。
33.在一个实施方案中,在框(318)处提供所确定位置误差的广播。这使其它运载工具中的位置确定系统能够得到位置误差通知,该通知含有与位置确定系统相关联的数据,诸如例如,含有gnss接收器110中的信号里的数据。该过程然后在框(302)处继续。此外,可在框(320)处基于测绘位置解决方案,扩充传感器位置解决方案,以提供更准确的位置解决方案。在框(320)处确定的扩充型传感器位置解决方案然后可以在框(322)处实施。具体实施的示例包括但不限于:使用扩充型传感器位置解决方案来显示所确定的位置(方位);使用自动化运载工具控制系统中的扩充型传感器位置解决方案来控制运载工具操作等。在该示例性实施方案中,该过程然后在框(302)处继续。
34.实施地形位置解决方案的其它示例示出于:图4的校准传感器流程图400、图5的更新地形流程图500、图6的替代路点流程图600以及图7的模式实施流程图700中。流程图400、500、600和700中的每幅图被示出为一系列有序框。在其它实施方案中,框的顺序可以按不同次序发生或并行发生。因此,实施方案不限于这些流程图所示的有序次序。
35.参见图4,示出了校准传感器流程图400示例。在该过程中,在框(402)处,将来自一个或多个传感器位置确定系统的传感器位置解决方案与dapa位置解决方案进行比较。如果在框(404)处确定没有差异,则该过程在框(402)处继续,将传感器位置解决方案与dapa位置解决方案进行比较。如果在框(404)处确定存在差异,则在框(406)处校准生成传感器位置解决方案的系统。校准可包括:调整位置确定系统的输出,以匹配来自dapa系统的测绘位置解决方案。然后,该过程在框(402)处继续,将传感器位置解决方案与测绘位置解决方案进行比较。校准传感器流程图400可用于校准任何提供了用于生成位置解决方案的信息的系统,诸如但不限于gnss接收器110、5g收发器117、ins 116等。
36.图5的更新地形流程图500示例始于:在框(502)处,使用dapa 132将所感测的测绘地形204与地形数据库108中存储的地形进行比较。在框(504)处,确定所感测的测绘地形204中的任何特征是否与存储地形中的特征不对应。如果地形(诸如在一个实施例中城市的地形)随着建筑物建成和拆除而随时间推移变化,则可能发生这种情况。如果在框(504)处确定没有发现测绘图地形中存在任何未知特征,则该过程在框(502)(使用dapa 132将所感
测的测绘地形204与地形数据库108中存储的地形进行比较)处继续。如果在当时的测绘地形204中已经发现了一个或多个未知特征,则在框(506)处更新地形数据库108以包括该一个或多个未知特征。该方法也可用于删除地形数据库108中不再存在于当时的测绘地形204中的特征。该过程然后在框(502)(使用dapa 132将当时的测绘地形204与地形数据库108中存储的地形进行比较)处继续。在一个示例性实施方案中,用于提供位置解决方案的其它系统中的一个系统可用于确认当添加或删除某特征时生成所感测的测绘地形204的系统的位置。
37.图6的替代路点流程图600示出了在一个示例性实施方案中,当测绘地形204中的特征的海拔变化不足以区分一个位置与其它位置时,提供替代路点的一种方式。该过程始于在框(602)处监测所感测的测绘地形204中的海拔解决方案。在框(604)处,确定测绘地形204中是否存在令人满意的海拔变化量。如果在框(604)处确定海拔解决方案中存在令人满意的变化量,则该过程在框(602)处继续监测。然而,如果在框(604)处确定测绘地形204中不存在足够的海拔变化,则在框(606)处生成替代路点。运载工具可使用替代路点来绘制不同的行进路径,该行进路径将使运载工具穿过地形,这将产生测绘地形204,该测绘地形具有足够的海拔偏差以确保所感测的测绘地形204足够独特,使得当发现与地形数据库108中存储的测绘图匹配时,可以依赖运载工具的确定位置。
38.图7的模式实施流程图700提供了一种示例性系统,该系统分析实时数据以发现可以帮助预测位置(方位)准确度并预防故障的模式。该过程始于框(702)(监测位置解决方案)。这些是来自运载工具所有位置确定系统的位置解决方案,包括dapa生成的测绘位置解决方案。在框(704)处确定是否可以从不同位置解决方案中检测到任何模式。如果在框(704)处未检测到模式,则该过程在框(702)处继续。如果在框(704)处确定存在模式,则在框(706)处确定该模式是否可用于在框(706)处预测准确度。如果不能用于确定准确度,则该过程在框(702)(监测位置解决方案)处继续。然而,如果在框(706)处确定该模式可预测准确度,则控制器使用来自该模式的信息,以在框(708)处提供最终位置解决方案,并且该过程在框(702)处继续。在该示例中,包括来自不同位置确定系统的当时位置解决方案的当时数据被传递到控制器102,该控制器分析实时数据并发现可以帮助预测位置准确度并预防故障的模式。
39.在一个示例性实施方案中,实施了存储器104中指令的预测和检测模块107的控制器102考虑了与运载工具导航相关的情境数据的动态行为模式以及来自gps、ins、terrain db、5g小区信息等的数据。如果例如该模式指示了位置确定系统中的一个位置确定系统在某些情形中所提供的位置信息不如其它系统在那些情形中所提供的位置信息那般准确,则在经历该情形时,将不使用来自该一个位置确定系统的信息来提供最终位置解决方案。此外,在一些实施方案中,与位置有关的来自系统的输入数据使得实施模块107中的指令的控制器102能够检测异常现象,并且基于在各种较早数据馈送(机器学习)中检测到的模式,对哪个单项或多项输入将提供更准确的导航位置作出确定。在一些实施方案中,控制器所实施的指令包括生成预测结果的回归模型,并且帮助决定应当将哪项传感器输入进行混合以在任何时刻提供最佳位置准确度。通过部署机器学习,由控制器102基于模块107中的指令所实施的人工智能可以以此类方式构建到系统中,该方式使得可以预测海拔测绘图并且可以用实时dapa雷达测高仪海拔数据来检查所预期的海拔测绘图以计算当时的位置。在一个
实施方案中,在当前测绘地形204不可用时,将从来自较早数据馈送的确定模式中习得的信息用于扩充当前的传感器位置解决方案。
40.示例性实施方案
41.实施例1是运载工具位置准确度增强系统。该系统包括至少一个位置确定系统、至少一个数字有源相控阵列雷达、至少一个存储器和至少一个控制器。至少一个位置确定系统被配置成生成传感器位置解决方案。至少一个数字有源相控阵列雷达被配置成生成测绘地形,该测绘地形包括海拔信息。至少一个存储器用于存储至少地形数据库和操作指令。至少一个控制器与至少一个位置确定系统、至少一个数字有源相控阵列雷达和至少一个存储器通信。至少一个控制器被配置成实施该存储器中的操作指令,以进行以下两项之间的测绘图匹配从而确定测绘位置解决方案:来自至少一个数字有源相控阵列雷达的所生成测绘地形和地形数据库中的地形海拔测绘图信息。至少一个控制器被进一步配置成:至少用测绘位置解决方案来扩充来自至少一个位置确定系统的传感器位置解决方案,以增强传感器位置解决方案的准确度。此外,至少一个位置确定系统包括全球导航卫星系统(gnss)。至少一个控制器被配置成:基于测绘位置解决方案,确定gnss中的位置误差;并且广播所确定的位置误差。
42.实施例2包括根据实施例1所述的系统,其中至少一个控制器被进一步配置成:当来自至少一个位置确定系统的传感器位置解决方案不可用时,使用测绘位置解决方案进行导航。
43.实施例3包括根据实施例1-2中任一项所述的系统,其中至少一个位置确定系统还包括以下中的一项:惯性导航系统、5g定位系统和增强型地面接近警告系统。
44.实施例4包括根据实施例3所述的系统,其中至少一个控制器被进一步配置成:至少部分地基于测绘位置解决方案,校准惯性导航系统。
45.实施例5包括根据实施例1-4中任一项所述的系统,其中将gnss中广播的确定位置误差用于至少一个其它运载工具中,以扩充来自至少一个其它运载工具的gnss接收器的传感器位置解决方案。
46.实施例6包括根据实施例1-5中任一项所述的系统,其中运载工具是空中运载工具、陆上运载工具和水上运载工具中的一种。
47.实施例7包括根据实施例1-6中任一项所述的系统,其中由数字有源相控阵列雷达生成的测绘地形包括在数字有源相控阵列雷达的正向观察范围内的测绘地形。
48.实施例8包括根据实施例1-7中任一项所述的系统,其中至少一个控制器被进一步配置成至少以下一项:使用来自数字有源相控阵列雷达系统的测绘地形以及来自至少一个位置确定系统的位置信息中的至少一者构建和增强地形数据库。
49.实施例9包括根据实施例1-8中任一项所述的系统,进一步地,其中至少一个控制器被配置成:当由至少一个位置确定系统生成的传感器位置解决方案与由数字有源相控阵列雷达系统生成的测绘位置解决方案的差异大于选定阈值时,生成错配警报信号。
50.实施例10包括根据实施例1-9中任一项所述的系统,进一步地,其中至少一个控制器被配置成:如果测绘地形并非处于具有令人满意的变化的次序中,则预测替代路点,以提供准确的测绘位置解决方案。
51.实施例11包括根据实施例1-10中任一项所述的系统,其中至少一个控制器被进一
步配置成:实时分析测绘位置解决方案和传感器位置解决方案以确定预测位置准确度的模式,并且当来自数字有源相控阵列雷达的当前测绘地形不可用时,使用由确定模式所习得的信息来扩充当前传感器位置解决方案。
52.实施例12包括一种增强运载工具位置确定系统准确度的方法。该方法包括:使用数字有源相控阵列雷达来生成包括海拔信息的测绘地形;将测绘地形与地形数据库中的地形海拔信息进行比较;当发现测绘地形与地形数据库中的地形海拔信息存在匹配时,确定测绘位置解决方案;将测绘位置解决方案与来自全球导航卫星系统(gnss)接收器的至少一个传感器位置解决方案进行比较;基于测绘位置解决方案与来自gnss接收器的传感器位置解决方案的比较,确定位置误差是否存在于来自gnss接收器的传感器位置解决方案中;并且广播所确定的位置误差。
53.实施例13包括根据实施例12所述的方法,还包括:基于测绘位置解决方案,扩充传感器位置解决方案。
54.实施例14包括根据实施例12-13中任一项所述的方法,还包括:基于测绘位置解决方案,校准gnss接收器。
55.实施例15包括根据实施例12-14中任一项所述的方法,还包括:由另一位置确定系统生成至少一个或多个传感器位置解决方案;监测传感器位置解决方案和测绘图位置解决方案中的模式;以及使用所确定的模式来生成扩充型位置解决方案。
56.实施例16包括根据实施例12-15中任一项所述的方法,还包括:确定测绘地形中检测到的特征是否不同于地形数据库中检测到的特征;以及更新地形数据库以囊括该特征。
57.实施例17包括一种增强运载工具位置确定系统准确度的方法,该方法包括:用数字有源相控阵列来生成包括海拔信息的测绘地形;监测测绘地形中的海拔解决方案的地形测绘图变化;并且当测绘地形中的海拔信息并未提供足够的测绘图变化时,生成用于运载工具行进的替代路点,以在将测绘地形与地形数据库中的地形海拔信息进行匹配时,区分当前运载工具位置。
58.实施例18包括根据实施例17所述的方法,还包括:当测绘地形中的测绘图变化提供了足够的海拔信息时,将测绘地形与地形数据库中的地形海拔信息进行比较,以在将测绘地形与地形数据库中的地形海拔信息进行匹配时,区分当前运载工具位置;当发现测绘地形与地形数据库中的地形海拔信息之间存在匹配时,确定测绘位置解决方案;将所确定的测绘位置解决方案与来自至少一个位置确定系统的至少一个传感器位置解决方案进行比较;以及基于测绘位置解决方案,扩充至少一个传感器位置解决方案。
59.实施例19包括根据实施例17-18中任一项所述的方法,还包括:当测绘地形中的测绘图变化提供了足够的海拔信息时,将测绘地形与地形数据库中的地形海拔信息进行比较,以在将测绘地形与地形数据库中的地形海拔信息进行匹配时,区分当前运载工具位置;当发现测绘地形与地形数据库中的地形海拔信息之间存在匹配时,确定测绘位置解决方案;将测绘位置解决方案与来自全球导航卫星系统(gnss)接收器的至少一个传感器位置解决方案进行比较;基于测绘位置解决方案与来自gnss接收器的传感器位置解决方案的比较,确定位置误差是否存在于来自gnss接收器的传感器位置解决方案中;并且广播所确定的位置误差。
60.实施例20包括根据实施例17-19中任一项所述的方法,还包括:当测绘地形中的测
绘图变化提供了足够的海拔信息时,将测绘地形与数据库中的地形海拔信息进行比较,以在将测绘地形与地形数据库中的地形海拔信息进行匹配时,区分当前运载工具位置;当发现测绘地形与地形数据库中的地形海拔信息之间存在匹配时,确定测绘位置解决方案;由至少一个位置确定系统生成传感器位置解决方案;监测传感器位置解决方案和测绘图位置解决方案中的模式;以及使用所确定的模式来生成扩充型位置解决方案。
61.尽管本文已说明和描述了特定实施方案,但本领域的普通技术人员将认识到,经计算以实现相同目的的任何布置可替代所展示的特定实施方案。本技术旨在涵盖本发明的任何修改或变型。因此,显而易见的是,本发明仅受权利要求书以及其等同物所限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。