1.本实用新型涉及救援机器人领域,尤其涉及一种灾后空陆两用救援机器人。
背景技术:
2.在灾难来临后的救援现场,为了保障救援人员的生命安全,可以利用救援机器人代替救援人员先进入目标地点进行地形探索与环境探测。在地势较为平坦,障碍较少的情况下,现有的轮履式救援机器人或多旋翼无人机便可以完成灾后现场的勘察搜索。但在复杂的灾害现场,地形变化多端,轮履式救援机器人很难在遇到较高的地形或障碍物时,进入区域进行搜索,而面对需要进入建筑物内部等复杂环境时,现有的多旋翼无人机更是无法进行深入救援探索。因此,需要一种在空中与地面上都能够进行活动的空陆两用救援机器人来解决这个问题。公开号为cn110496345a的专利文献公开了一种陆空两栖救援机器人,包括载物骨架、多旋翼无人机和履带行走装置,载物骨架的顶部安装有用于带动整机飞行的多旋翼无人机,载物骨架的底部设有履带行走装置。该救援机器人在地面进行活动时,旋翼所占面积较大,无法适应多种复杂地形间的运动。
技术实现要素:
3.本实用新型所要解决的技术问题在于提供一种在空中与地面上都能够进行活动,且能够适应多种复杂地形间的运动的灾后空陆两用救援机器人。
4.本实用新型是通过以下技术手段实现解决上述技术问题的:灾后空陆两用救援机器人,包括机身、机臂、自动折叠机构、旋翼机构、陆地行驶机构,多个机臂分别通过所述自动折叠机构安装在所述机身的周围,各机臂上分别安装有旋翼机构,所述陆地行驶机构安装在所述机身的下方。本实用新型为旋翼机器人与地面机器人的有机结合,在空中与地面两种形态间切换自如;机器人在空中时,各机臂展开,通过旋翼机构进行活动;机器人在地面时通过陆地行驶机构进行活动,并通过自动折叠机构将各机臂折叠到机身附近,减少了旋翼机构所占面积,从而可以适应多种复杂地形间的运动。
5.作为优化的技术方案,所述自动折叠机构包括顺序传动机构、前传动机构、后传动机构;
6.所述顺序传动机构包括外壳、滑移轴、螺杆、第一输出轴、第二输出轴、第一电机、第一齿轮、第二齿轮、第三齿轮、拨叉、第四齿轮、第五齿轮;所述滑移轴、螺杆、第一输出轴和第二输出轴相互平行并分别转动连接在所述外壳的内部;所述第一电机固定连接在所述外壳,其输出轴与所述滑移轴的一端固定连接;所述第一齿轮固定连接在所述滑移轴的一端并与固定连接在所述螺杆的一端的第二齿轮啮合;所述第三齿轮滑动连接在所述滑移轴上并能够随所述滑移轴转动,所述拨叉螺接在所述螺杆上,所述拨叉的内表面与所述第三齿轮的前端面和后端面分别接触,能够推动所述第三齿轮沿滑移轴的轴线方向运动;所述第四齿轮固定连接在所述第一输出轴的前段,所述第五齿轮固定连接在所述第二输出轴的后段;
7.所述第三齿轮在所述滑移轴的前段与第四齿轮啮合,与所述第五齿轮脱离啮合;所述第三齿轮在所述滑移轴的中段与所述第四齿轮和所述第五齿轮同时啮合;所述第三齿轮在所述滑移轴的后段与所述第五齿轮啮合,与所述第四齿轮脱离啮合;
8.所述机臂设有四个,四个机臂左右对称分布;所述第一输出轴能够通过所述前传动机构带动位于所述机身前部的两个机臂展开或折叠,所述第二输出轴能够通过所述后传动机构带动位于所述机身后部的两个机臂展开或折叠。
9.在仅使用一个电机的情况下完成四个机臂按顺序自动折叠的过程,并都具有自锁特性,无需增加额外的驱动电机与自锁机构实现机臂的折叠与锁定。
10.作为优化的技术方案,所述前传动机构包括前蜗杆、前蜗轮、第一前绞盘、第二前绞盘、前传动绳、前机臂座;所述前蜗杆固定连接在所述第一输出轴上,两个前蜗轮同时与所述前蜗杆啮合;两个第一前绞盘分别转动连接在所述机身上,两个前蜗轮分别固定连接在两个第一前绞盘上;两个第二前绞盘分别转动连接在所述机身的前部两侧,所述第一前绞盘的转动轴平行于所述第二前绞盘的转动轴,每个第一前绞盘与其对应的一个第二前绞盘之间缠绕有前传动绳;两个第二前绞盘上分别固定连接有前机臂座,位于所述机身前部的两个机臂分别固定连接在两个前机臂座中;
11.所述后传动机构包括后蜗杆、后蜗轮、第一后绞盘、第二后绞盘、后传动绳、后机臂座;所述后蜗杆固定连接在所述第二输出轴上,两个后蜗轮同时与所述后蜗杆啮合;两个第一后绞盘分别转动连接在所述机身上,两个后蜗轮分别固定连接在两个第一后绞盘上;两个第二后绞盘分别转动连接在所述机身的后部两侧,所述第一后绞盘的转动轴与所述第二后绞盘的转动轴形成夹角,每个第一后绞盘与其对应的一个第二后绞盘之间缠绕有后传动绳;两个第二后绞盘上分别固定连接有后机臂座,位于所述机身后部的两个机臂分别固定连接在两个后机臂座中。
12.位于机身前部的两个机臂绕与第一前绞盘的转动轴平行的轴线向两侧转动展开或折叠,位于机身后部的两个机臂绕与第一后绞盘的转动轴形成夹角的轴线向上转动展开或折叠,折叠后前后机臂能够上下交叠在一起,展开和折叠的过程前后机臂不产生干涉。
13.作为优化的技术方案,所述陆地行驶机构设有两个,两个陆地行驶机构左右对称安装在所述机身的下方两侧;所述陆地行驶机构包括带轮、履带、固定板、连接管、第三电机、电机盖;两个带轮分别支撑在所述履带的两端;两个固定板分别位于所述履带的两侧,每个固定板的两端分别与两个带轮转动连接;其中一个固定板通过多个连接管与所述机身固定连接;所述第三电机固定连接在所述固定板上,其输出轴与其中一个带轮的转动轴固定连接,所述电机盖固定连接在所述固定板上并罩在所述第三电机的外部。履带通过第三电机带动运行,电机盖保证了第三电机防尘防水的能力。
14.作为优化的技术方案,所述陆地行驶机构还包括支撑架、上辅助轮、下辅助轮;所述履带的内部沿运行方向间隔设置有多个支撑架,各支撑架的两侧分别与两个固定板固定连接;所述支撑架的上部转动连接有多个上辅助轮,所述上辅助轮接触所述履带上部的内表面;所述支撑架的下部转动连接有多个下辅助轮,所述下辅助轮接触所述履带下部的内表面。上辅助轮和下辅助轮能够辅助支撑履带。
15.作为优化的技术方案,所述机身包括机身骨架、夜视广角高清摄像头、红外补光灯、天线,所述机身骨架的前部安装有夜视广角高清摄像头和红外补光灯,所述机身骨架的
顶部安装有天线。夜视广角高清摄像头与红外补光灯共同作用,用于采集明亮或黑暗环境的影像,采集的影像传输至下位遥控,让操控者实时观看机器人拍摄的环境影像。
16.作为优化的技术方案,所述天线设有两根。双模式图传系统的数字图传部分通过其中一根天线发射信号,模拟图传部分通过另一根天线发射信号。
17.作为优化的技术方案,所述机身骨架的顶部安装有挂载模块,所述挂载模块包括热红外成像设备和激光雷达。热红外成像设备能够左右摆动,实时获得摆动视野范围内的热红外信息,并传输至下位遥控,从而让操作者及时发现周围的生命体征;激光雷达可以在机器人陆地行驶过程中实时对周围环境进行扫描和建图,并传输至下位遥控,为后续人员进入现场搜救提供精确的地图指引。
18.作为优化的技术方案,所述机身骨架的后部安装有传感器模块,所述传感器模块包括传感器插槽和单片机;所述传感器插槽具有多个插口,各插口均能够插接气体传感器;所述传感器插槽连接所述单片机。传感器模块可以更换不同有毒有害气体的传感器,以适应各种类型的救援环境,保障救援人员的安全。
19.作为优化的技术方案,所述机身骨架的内部安装有两个电池模组,两个电池模组均能够单独供电。在低电量时,通过依次更换两个电池模组,可以避免机器人系统的断电,从而在连续作业中节约了断电后系统重启的时间。
20.本实用新型的优点在于:
21.1、本实用新型为旋翼机器人与地面机器人的有机结合,在空中与地面两种形态间切换自如;机器人在空中时,各机臂展开,通过旋翼机构进行活动;机器人在地面时通过陆地行驶机构进行活动,并通过自动折叠机构将各机臂折叠到机身附近,减少了旋翼机构所占面积,从而可以适应多种复杂地形间的运动。
22.2、在仅使用一个电机的情况下完成四个机臂按顺序自动折叠的过程,并都具有自锁特性,无需增加额外的驱动电机与自锁机构实现机臂的折叠与锁定。
23.3、操控者能够实时观看机器人拍摄的环境影像,能够实时获得热红外信息以及时发现周围的生命体征,并能够实时获得精确的地图指引。
24.4、传感器模块可以更换不同有毒有害气体的传感器,以适应各种类型的救援环境,保障救援人员的安全。
25.5、在低电量时,通过依次更换两个电池模组,可以避免机器人系统的断电,从而在连续作业中节约了断电后系统重启的时间。
附图说明
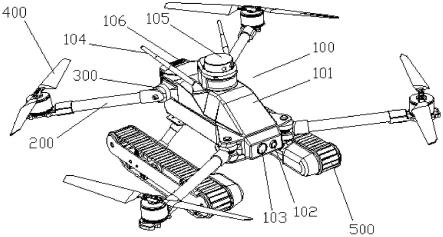
26.图1是本实用新型实施例灾后空陆两用救援机器人的机臂展开状态的结构示意图。
27.图2是本实用新型实施例灾后空陆两用救援机器人的机臂折叠状态的结构示意图。
28.图3是本实用新型实施例顺序传动机构的结构示意图。
29.图4是本实用新型实施例顺序传动机构去除外壳的结构示意图。
30.图5是本实用新型实施例自动折叠机构的结构示意图。
31.图6是本实用新型实施例自动折叠机构连接四个机臂的结构示意图。
32.图7是本实用新型实施例旋翼机构的结构示意图。
33.图8是本实用新型实施例桨夹的结构示意图。
34.图9是本实用新型实施例陆地行驶机构的结构示意图。
35.图10是本实用新型实施例支撑架、上辅助轮和下辅助轮的结构示意图。
具体实施方式
36.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
37.如图1、图2所示,本实用新型实施例公开一种灾后空陆两用救援机器人,包括机身100、机臂200、自动折叠机构300、旋翼机构400、陆地行驶机构500。
38.四个碳纤维的机臂200分别通过自动折叠机构300左右对称安装在机身100 的周围,各机臂200上分别安装有旋翼机构400,陆地行驶机构500设有两个,两个陆地行驶机构500左右对称安装在机身100的下方两侧。
39.机身100包括机身骨架101、夜视广角高清摄像头102、红外补光灯103、天线104、挂载模块105、传感器模块106。
40.机身骨架101的内部安装有控制系统和两个电池模组,所述控制系统包括主控芯片、飞控模块、电调模块、图传数传模块;两个电池模组均能够单独供电,在低电量时,通过依次更换两个电池模组,可以避免机器人系统的断电,从而在连续作业中节约了断电后系统重启的时间。
41.机身骨架101的前部安装有夜视广角高清摄像头102和红外补光灯103,夜视广角高清摄像头102连接所述图传数传模块,夜视广角高清摄像头102与红外补光灯103共同作用,用于采集明亮或黑暗环境的影像,采集的影像传输至下位遥控,让操控者实时观看机器人拍摄的环境影像。
42.机身骨架101的顶部安装有两根天线104,天线104连接所述图传数传模块;所述图传数传模块采用数字、模拟双模式图传系统,数字图传部分使用5.3g频段采集夜视广角高清摄像头102的csi信号,通过树莓派4进行osd处理,树莓派4通过usb连接rtl8812u网络芯片,通过其中一根天线104发射信号,遥控设备的数字图传接收机接收数字图传信号;模拟图传部分将夜视广角高清摄像头102的csi信号转换为av信号,传输进1.2g模拟图传发射器,通过另一根天线104发射信号,遥控设备的模拟图传接收器接受模拟图传信号。
43.机身骨架101的顶部安装有挂载模块105,挂载模块105包括热红外成像设备和激光雷达,所述热红外成像设备和所述激光雷达均连接所述图传数传模块;热红外成像设备能够左右摆动,实时获得摆动视野范围内的热红外信息,并传输至下位遥控,从而让操作者及时发现周围的生命体征;激光雷达可以在机器人陆地行驶过程中实时对周围环境进行扫描和建图,并传输至下位遥控,为后续人员进入现场搜救提供精确的地图指引。
44.机身骨架101的后部安装有传感器模块106,传感器模块106包括传感器插槽和单片机;所述传感器插槽具有多个插口,各插口均能够插接气体传感器,在面对各种各样的救
援环境时,所需要检测的有毒有害气体的类型不同,设置可替换气体传感器的传感器插槽,可以根据救援环境的需要随时替换不同有毒有害气体的传感器;所述传感器插槽连接所述单片机,所述单片机连接所述主控芯片,单片机作为协处理器,用于读取气体传感器的数据,并将其汇总,统一传输给主控芯片。
45.如图3至图6所示,自动折叠机构300包括顺序传动机构、前传动机构、后传动机构;
46.所述顺序传动机构包括外壳301、滑移轴302、螺杆303、第一输出轴304、第二输出轴305、第一电机306、第一齿轮307、第二齿轮308、第三齿轮309、拨叉310、第四齿轮311、第五齿轮312;滑移轴302、螺杆303、第一输出轴 304和第二输出轴305相互平行并分别通过轴承转动连接在外壳301的内部;第一电机306固定连接在外壳301上,其输出轴与滑移轴302的一端固定连接;第一齿轮307固定连接在滑移轴302的一端并与固定连接在螺杆303的一端的第二齿轮308啮合;第三齿轮309通过六边形截面的中心孔滑动连接在滑移轴 302上并能够随滑移轴302转动;拨叉310螺接在螺杆303上,拨叉310的内表面与第三齿轮309的前端面和后端面分别接触,能够推动第三齿轮309沿滑移轴302的轴线方向运动;第四齿轮311固定连接在第一输出轴304的前段,第五齿轮312固定连接在第二输出轴305的后段;第三齿轮309在滑移轴302的前段与第四齿轮311啮合,与第五齿轮312脱离啮合;第三齿轮309在滑移轴 302的中段与第四齿轮311和第五齿轮312同时啮合;第三齿轮309在滑移轴 302的后段与第五齿轮312啮合,与第四齿轮311脱离啮合。
47.所述前传动机构包括前蜗杆313、前蜗轮314、第一前绞盘315、第二前绞盘316、前传动绳317、前机臂座318;前蜗杆313固定连接在第一输出轴304 上,两个前蜗轮314同时与前蜗杆313啮合,形成减速机构;两个第一前绞盘 315分别转动连接在机身骨架101上,两个前蜗轮314分别固定连接在两个第一前绞盘315上;两个第二前绞盘316分别转动连接在机身骨架101的前部两侧,第一前绞盘315的转动轴平行于第二前绞盘316的转动轴,每个第一前绞盘315 与其对应的一个第二前绞盘316之间缠绕有前传动绳317,前传动绳317采用钢丝绳,通过调节前传动绳317顺时针或逆时针的绕线方向,可以调节第二前绞盘316的转动方向;两个第二前绞盘316上分别固定连接有前机臂座318,位于机身100前部的两个机臂200分别固定连接在两个前机臂座318中。
48.所述后传动机构包括后蜗杆319、后蜗轮320、第一后绞盘321、第二后绞盘322、后传动绳323、后机臂座324;后蜗杆319固定连接在第二输出轴305 上,两个后蜗轮320同时与后蜗杆319啮合,形成减速机构;两个第一后绞盘 321分别转动连接在机身骨架101上,两个后蜗轮320分别固定连接在两个第一后绞盘321上;两个第二后绞盘322分别转动连接在机身骨架101的后部两侧,第一后绞盘321的转动轴与第二后绞盘322的转动轴形成夹角,每个第一后绞盘321与其对应的一个第二后绞盘322之间缠绕有后传动绳323,后传动绳323 采用钢丝绳,通过调节后传动绳323顺时针或逆时针的绕线方向,可以调节第二后绞盘322的转动方向;两个第二后绞盘322上分别固定连接有后机臂座324,位于机身100后部的两个机臂200分别固定连接在两个后机臂座324中。
49.第一输出轴304能够通过所述前传动机构带动位于机身100前部的两个机臂200展开或折叠,第二输出轴305能够通过所述后传动机构带动位于机身100 后部的两个机臂200展开或折叠。
50.如图7、图8所示,旋翼机构400包括电机座401、第二电机402、桨夹403、桨叶404;第
二电机402采用无刷电机,第二电机402通过电机座401固定连接在机臂200上,其输出轴与桨夹403固定连接;桨夹403的两侧分别设有桨叶安装槽,两个桨叶404分别通过螺丝转动连接在所述桨叶安装槽中,桨叶404 的转动轴平行于第二电机402的输出轴。
51.如图9、图10所示,陆地行驶机构500包括带轮501、履带502、固定板 503、连接管504、第三电机(图未示)、电机盖505、支撑架506、上辅助轮507、下辅助轮508;两个带轮501分别支撑在履带502的两端;两个固定板503分别位于履带502的两侧,每个固定板503的两端分别与两个带轮501转动连接;其中一个固定板503通过两个碳纤维的连接管504与机身骨架101固定连接;所述第三电机固定连接在固定板503上,其输出轴与其中一个带轮501的转动轴固定连接,电机盖505固定连接在固定板503上并罩在所述第三电机的外部,保证第三电机防尘防水的能力;履带502的内部沿运行方向间隔设置有多个支撑架506,各支撑架506的两侧分别与两个固定板503固定连接;支撑架506 的上部转动连接有两个上辅助轮507,上辅助轮507接触履带502上部的内表面;支撑架506的下部转动连接有四个下辅助轮508,下辅助轮508接触履带502 下部的内表面;履带502通过第三电机带动运行,上辅助轮507和下辅助轮508 能够辅助支撑履带502。
52.本实用新型灾后空陆两用救援机器人的工作原理为:
53.机器人在空中时,各机臂200展开,通过旋翼机构400进行活动;机器人在地面时通过陆地行驶机构500进行活动,并通过自动折叠机构300将各机臂 200折叠到机身100附近,减少了旋翼机构400所占面积,从而可以适应多种复杂地形间的运动。
54.机臂200的展开过程为:自动折叠机构300初始状态时,第三齿轮309和拨叉310分别位于滑移轴302和螺杆303的前端,此时第三齿轮309与第四齿轮311啮合,与第五齿轮312脱离啮合;第一电机306正向转动,带动滑移轴 302转动,滑移轴302带动第三齿轮309转动,第三齿轮309通过第四齿轮311 带动第一输出轴304转动;同时滑移轴302还通过相互啮合的第一齿轮307和第二齿轮308带动螺杆303转动,使拨叉310沿螺杆303向后移动,拨叉310 带动第三齿轮309沿滑移轴302向后移动;当第三齿轮309移动到滑移轴302 的中段时,其与第四齿轮311和第五齿轮312同时啮合,能够同时带动第一输出轴304和第二输出轴305转动;当第三齿轮309移动到滑移轴302的后段时,其与第四齿轮311脱离啮合,第一输出轴304停止转动,第二输出轴305继续转动直到拨叉310运动至限位。
55.综上,在机臂200的展开过程中,顺序传动机构的运动顺序为第一输出轴 304转动
→
第一输出轴304和第二输出轴305共同转动
→
第一输出轴304停止转动
→
第二输出轴305停止转动的过程;在机臂200的折叠过程中,第一电机306 逆向转动,顺序传动机构的运动顺序与上述过程相反。
56.第一输出轴304转动时,通过前蜗杆313带动两个前蜗轮314转动,两个前蜗轮314分别带动两个第一前绞盘315转动,两个第一前绞盘315分别通过平行传动的前传动绳317带动两个第二前绞盘316转动,使位于机身100前部的两个机臂200绕与第一前绞盘315的转动轴平行的轴线向两侧转动展开;第二输出轴305转动时,通过后蜗杆319带动两个后蜗轮320转动,两个后蜗轮 320分别带动两个第一后绞盘321转动,两个第一后绞盘321分别通过带夹角传动的后传动绳323带动两个第二后绞盘322转动,使位于机身100后部的两个机臂200绕与第一后绞盘321的转动轴形成夹角的轴线向上转动展开。
57.综上,在机臂200的展开过程中,展开顺序为位于机身100前部的两个机臂200展开
→
位于机身100前部的两个机臂200和位于机身100后部的两个机臂200共同展开
→
位于机身100前部的两个机臂200停止展开
→
位于机身100 后部的两个机臂200停止展开;在机臂200的折叠过程中,第一电机306逆向转动,折叠顺序与展开顺序相反。
58.旋翼机构400的工作原理为:第二电机402带动桨夹403旋转,使两个桨叶404旋转;由于桨叶404通过螺丝转动连接在桨叶安装槽中,机臂200折叠后,桨叶404与机器人的结构或外界物体接触时,会以螺丝为轴自动旋转至空位,不与其他结构产生干涉。
59.以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。