1.本发明涉及红外图像处理领域,尤其涉及一种基于细节丰富度的红外图像增强方法。
背景技术:
2.在晴朗天气条件下现有红外瞄准镜和红外机芯等产品在观察半天半地场景时地面部分细节不足,这是由于原始14位深红外图像动态范围较大造成的。
技术实现要素:
3.为了解决地面部分细节增益较低的问题,本技术提出了一种基于细节丰富度的红外图像增强方法。
4.本技术提供的一种基于细节丰富度的红外图像增强方法,包括以下:
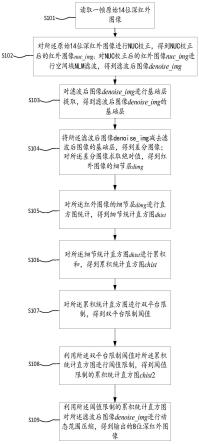
5.s101:读取一帧原始14位深红外图像;
6.s102:对所述原始14位深红外图像进行nuc校正,得到nuc校正后的红外图像nuc_img;对nuc校正后的红外图像nuc_img进行空间域nlm滤波,得到滤波后图像denoise_img;
7.s103:对滤波后图像denoise_img进行基础层提取,得到滤波后图像denoise_img的基础层;
8.s104:将所述滤波后图像denoise_img减去滤波后图像的基础层,得到差分图像;对所述差分图像求取绝对值,得到红外图像的细节层dimg;
9.s105:对所述红外图像的细节层dimg进行直方图统计,得到细节统计直方图dhist;
10.s106:对所述细节统计直方图dhist进行累积和,得到累积统计直方图chist;
11.s107:对所述累积统计直方图进行双平台限制,得到双平台限制阈值;
12.s108:利用所述双平台限制阈值对所述累积统计直方图进行阈值限制,得到阈值限制的累积统计直方图chist2;
13.s109:利用所述阈值限制的累积统计直方图对所述滤波后图像denoise_img进行动态范围压缩,得到输出的8位深红外图像。
14.进一步地,步骤s102中,所述nuc校正包括一点校正和两点校正。
15.进一步地,所述一点校正为将所述原始14位深红外图像减去本底图像,得到一点校正后的红外图像;其中,所述本底图像为对恒温均匀面读取的原始14位深红外图像。
16.进一步地,所述两点校正为将所述一点校正后的红外图像乘以k系数;所述k系数的计算公式,如式(1)所示:
[0017][0018]
式(1)中img1和img2分别为对低温均匀面和高温均匀面读取的原始14位深红外图像,mv1和mv2分别为img1和img2的像素灰度平均值;低温均匀面和高温均匀面具体指:对5
℃黑体采集的均匀面图像是低温均匀面、对60℃黑体采集的均匀面图像是高温均匀面。
[0019]
进一步地,步骤s103具体为:对滤波后图像denoise_img进行参数为σn,核大小为7*7的高斯滤波,得到滤波后图像的基础层。
[0020]
参数σn的计算方法如下:
[0021]
对滤波后图像denoise_img进行核为n的卷积计算,得到卷积后的图像cimg;所述核n如式(2)所示:
[0022][0023]
对所述卷积后的图像cimg进行式(3)所示计算,得到所述参数σn;
[0024][0025]
式(3)中w表示图像的宽,h表示图像的高,abs()表示求绝对值运算,sum()表示求和运算。
[0026]
进一步地,步骤s105中细节统计直方图dhist的求解过程如下,dhist(g)=sum(dimg(i,j)),其中g=denoise_img(i,j),g表示滤波后的图像的灰度值,灰度值作为索引值;sum()表示求和;dimg(i,j)表示细节层对应第i行第j列的细节值,细节统计直方图dhist统计的是指定灰度g下,细节层中对应像素的细节值的和;
[0027]
进一步地,步骤s106中,累积统计直方图具体如式(4):
[0028]
chist(g)=sum(dhist(1:g))
ꢀꢀꢀ
(4)
[0029]
式(4)中chist表示累积统计直方图,g表示灰度索引值,sum()表示求和运算。
[0030]
进一步地,步骤s107具体为:预设双平台限制比例rate;将所述累积统计直方图按照式(5)判断,得到双平台限制阈值t
low
和t
hight
;
[0031]
chist(g1)《rate*∑dimg(i,j)《chist(g2)
[0032]
chist(g3)《(1-rate)*∑dimg(i,j)《chist(g4)
ꢀꢀꢀ
(5)
[0033]
则,t
low
=g2,t
hight
=g3;其中g1、g2、g3、g4表示经式(5)比较确定后的灰度索引值,且g1《g2,g3《g4;∑dimg(i,j)表示红外图像的细节层dimg所有细节值的和。
[0034]
进一步地,步骤s108中,阈值限制的累积统计直方图chist2的计算公式如式(6):
[0035]
chist2(g)=0,g《t
low
[0036]
chist2(g)=dhist(t
low
:g),t
low
《=g《=t
hight
[0037]
chist2(g)=dhist(t
low
:t
hight
),g》t
hight
ꢀꢀꢀ
(6)
[0038]
式(6)中,g表示灰度索引值;得到阈值限制的累积统计直方图chist2后,还对其进行归一化处理。
[0039]
步骤s109中输出的8位深红外图像如式(7):
[0040]
oimg(i,j)=chist2(denoise_img(i,j))*255
ꢀꢀꢀ
(7)
[0041]
式(7)中,oimg表示所述的输出的8位深红外图像,(i,j)表示位置,i表示图像行坐标,j表示图像列坐标。
[0042]
与现有技术相比,本发明的有益效果包括:解决观察半天半地场景时地面部分细
节增益较低的问题,增强了地面部分的细节,改进了图像的显示效果。
附图说明
[0043]
图1是本发明方法的流程图。
具体实施方式
[0044]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
[0045]
请参考图1,图1是本发明方法的流程图;方法具体包括以下步骤:
[0046]
s101:读取一帧原始14位深红外图像;
[0047]
s102:对所述原始14位深红外图像进行nuc校正,得到nuc校正后的红外图像nuc_img;对nuc校正后的红外图像nuc_img进行空间域nlm滤波,得到滤波后图像denoise_img;
[0048]
需要说明的是,步骤s102中,所述nuc校正包括一点校正和两点校正。
[0049]
所述一点校正为将所述原始14位深红外图像减去本底图像,得到一点校正后的红外图像;其中,所述本底图像为对恒温均匀面读取的原始14位深红外图像。
[0050]
所述两点校正为将所述一点校正后的红外图像乘以k系数;所述k系数的计算公式,如式(1)所示:
[0051][0052]
式(1)中img1和img2分别为对低温均匀面和高温均匀面读取的原始14位深红外图像,mv1和mv2分别为img1和img2的像素灰度平均值;低温均匀面和高温均匀面具体指:对5℃黑体采集的均匀面图像是低温均匀面、对60℃黑体采集的均匀面图像是高温均匀面。
[0053]
s103:对滤波后图像denoise_img进行基础层提取,得到滤波后图像denoise_img的基础层;
[0054]
需要说明的是,步骤s103具体为:对滤波后图像denoise_img进行参数为σn,核大小为7*7的高斯滤波,得到滤波后图像的基础层。
[0055]
参数σn的计算方法如下:
[0056]
对滤波后图像denoise_img进行核为n的卷积计算,得到卷积后的图像cimg;所述核n如式(2)所示:
[0057][0058]
对所述卷积后的图像cimg进行式(3)所示计算,得到所述参数σn;
[0059][0060]
式(3)中w表示图像的宽,h表示图像的高,abs()表示求绝对值运算,sum()表示求和运算。
[0061]
s104:将所述滤波后图像denoise_img减去滤波后图像的基础层,得到差分图像;对所述差分图像求取绝对值,得到红外图像的细节层dimg;
[0062]
s105:对所述红外图像的细节层dimg进行直方图统计,得到细节统计直方图dhist;dhist(g)=sum(dimg(i,j)),其中g=denoise_img(i,j),g表示滤波后的图像的灰度值,灰度值作为索引值;sum()表示求和;dimg(i,j)表示细节层对应第i行第j列的细节值,细节统计直方图dhist统计的是指定灰度g下,细节层中对应像素的细节值的和。
[0063]
s106:对所述细节统计直方图dhist进行累积和,得到累积统计直方图chist;
[0064]
需要说明的是,步骤s106中,累积统计直方图具体如式(4):
[0065]
chist(g)=sum(dhist(1:g))
ꢀꢀꢀ
(4)
[0066]
式(4)中chist表示累积统计直方图,g表示灰度索引值,sum()表示求和运算。
[0067]
s107:对所述累积统计直方图进行双平台限制,得到双平台限制阈值;
[0068]
需要说明的是,步骤s107具体为:预设双平台限制比例rate;将所述累积统计直方图按照式(5)判断,得到双平台限制阈值t
low
和t
hight
;
[0069]
chist(g1)《rate*∑dimg(i,j)《chist(g2)
[0070]
chist(g3)《(1-rate)*∑dimg(i,j)《chist(g4)
ꢀꢀꢀ
(5)
[0071]
则,t
low
=g2,t
hight
=g3;其中g1、g2、g3、g4表示经式(5)比较确定后的灰度索引值,且g1《g2,g3《g4;∑dimg(i,j)表示红外图像的细节层dimg所有细节值的和。
[0072]
s108:利用所述双平台限制阈值对所述累积统计直方图进行阈值限制,得到阈值限制的累积统计直方图chist2;
[0073]
需要说明的是,步骤s108中,阈值限制的累积统计直方图chist2的计算公式如式(6):
[0074]
chist2(g)=0,g《t
low
[0075]
chist2(g)=dhist(t
low
:g),t
low
《=g《=t
hight
[0076]
chist2(g)=dhist(t
low
:t
hight
),g》t
hight
ꢀꢀꢀ
(6)
[0077]
式(6)中,g表示灰度索引值;得到阈值限制的累积统计直方图chist2后,还对其进行归一化处理。
[0078]
s109:利用所述阈值限制的累积统计直方图对所述滤波后图像denoise_img进行动态范围压缩,得到输出的8位深红外图像。
[0079]
需要说明的是,步骤s109中输出的8位深红外图像如式(7):
[0080]
oimg(i,j)=chist2(denoise_img(i,j))*255
ꢀꢀꢀ
(7)
[0081]
式(7)中,oimg表示所述的输出的8位深红外图像,(i,j)表示位置,i表示图像行坐标,j表示图像列坐标。
[0082]
本发明的有益效果是:解决观察半天半地场景时地面部分细节增益较低的问题,增强了地面部分的细节,改进了图像的显示效果。
[0083]
应理解,上述实施例中各步骤的序号的大小并不意味着执行顺序的先后,各过程的执行顺序应以其功能和内在逻辑确定,而不应对本技术实施例的实施过程构成任何限定。
[0084]
以上本发明的具体实施方式,并不构成对本发明保护范围的限定。任何根据本发明的技术构思所做出的各种其他相应的改变与变形,均应包含在本发明权利要求的保护范
围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
