技术特征:
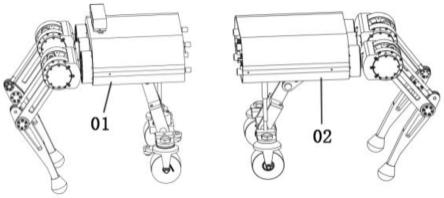
1.可分体多模态轮腿四足机器人,其特征在于:由一号分离体(01)和二号分离体(02)组成,所述一号分离体(01)和二号分离体(02)均可实现单独作业。2.根据权利要求1所述的可分体多模态轮腿四足机器人,其特征在于:所述一号分离体(01)和二号分离体(02)均包括躯体框架模块(1)、支腿模块(2)、平行四杆模块(3)、控制板(4)、电池(5)和轮毂平移模块(10),所述一号分离体(01)还包括前轮转向模块(6)和图像采集模块(7),所述二号分离体(02)还包括后轮驱动模块(8),所述躯体框架模块(1)用于安装支腿模块(2)、平行四杆模块(3)、控制板(4)、电池(5)和图像采集模块(7),每个所述躯体框架模块(1)安装有两个支腿模块(2),所述图像采集模块(7)搭载可旋转云台,可进行360度全景图像信息获取,所述平行四杆模块(3)和轮毂平移模块(10)用于带动前轮转向模块(6)或后轮驱动模块(8)进行升降和左右移动,所述一号分离体(01)和二号分离体(02)通过左右两侧的锁紧与释放模块(9)实现分离与组合。3.根据权利要求2所述的可分体多模态轮腿四足机器人,其特征在于:所述躯体框架模块(1)包括挡板支架(101)和四个连接管(102),四个所述连接管(102)分别固定连接在挡板支架(101)的四个角上,所述锁紧与释放模块(9)包括锁紧轴(901)、t型特殊套筒(902)、复位弹簧(903)、止推杆(904)、楔形块(905)、一号电动推杆(906)、一号固定架(907)和接近传感器(908),所述锁紧轴(901)和t型特殊套筒(902)分别固定连接在一号分离体(01)和二号分离体(02)上连接管(102)的端部,在所述锁紧轴(901)的圆周面上开设有环形槽(909),所述锁紧轴(901)的前端呈锥形,所述锁紧轴(901)可套插进t型特殊套筒(902)中,所述t型特殊套筒(902)的内腔与锁紧轴(901)的形状相对应,所述止推杆(904)活动设置在t型特殊套筒(902)上的竖直管中,且所述止推杆(904)的下端可卡在环形槽(909)内,所述复位弹簧(903)套设在止推杆(904)上,用于对止推杆(904)施加远离t型特殊套筒(902)的力,在上下两个止推杆(904)之间设置有楔形块(905),在所述楔形块(905)的厚端固定连接在一号电动推杆(906)上,所述一号电动推杆(906)的另一端安装在一号固定架(907)上,所述一号固定架(907)安装在上下两个连接管(102)之间,且一号固定架(907)与t型特殊套筒(902)位于相同的连接管(102)上,所述接近传感器(908)有两个,分别安装于左右两侧的连接管(102)上,所述接近传感器(908)与锁紧轴(901)安装在相同的分离体上,所述一号电动推杆(906)、接近传感器(908)和图像采集模块(7)均由控制板(4)控制。4.根据权利要求2所述的可分体多模态轮腿四足机器人,其特征在于:所述支腿模块(2)包括一号伺服电机(201)、二号伺服电机(202)、三号伺服电机(203)、电机固定架(204)、小腿旋转轴(205)、小腿连接杆(206)、大腿连接杆(207)、大腿杆件(208)和橡胶足端(209),所述一号伺服电机(201)固定安装在挡板支架(101)上,所述电机固定架(204)安装在一号伺服电机(201)的输出轴上,所述二号伺服电机(202)和三号伺服电机(203)分别安装在电机固定架(204)的左右两侧,且所述二号伺服电机(202)和三号伺服电机(203)同轴设置,所述小腿旋转轴(205)固定安装在二号伺服电机(202)的输出轴上,所述小腿连接杆(206)的一端铰接在小腿旋转轴(205)的一侧,所述小腿连接杆(206)的另一端与大腿杆件(208)的一端铰接,所述大腿连接杆(207)的一端与三号伺服电机(203)的输出轴铰接,所述大腿连接杆(207)的另一端与大腿杆件(208)铰接,所述小腿连接杆(206)两端的铰接点与大腿连接杆(207)两端的铰接点共同构成平行四边形,所述橡胶足端(209)安装在大腿杆件(208)的下端。
5.根据权利要求2所述的可分体多模态轮腿四足机器人,其特征在于:所述平行四杆模块(3)包括升降电机(301),所述升降电机(301)安装在挡板支架(101)的中部,在所述升降电机(301)的输出轴上通过梯度齿轮轴(302)安装有一号锥齿轮(303),在所述一号锥齿轮(303)的左右两侧分别啮合连接有二号锥齿轮(304)和三号锥齿轮(305),所述二号锥齿轮(304)和三号锥齿轮(305)安装在同一锥齿轮轴(306)上,所述锥齿轮轴(306)的两端分别安装在两个l型固定架(307)上,所述l型固定架(307)安装在挡板支架(101)上,所述二号锥齿轮(304)的轮毂侧固定连接有一号升降杆(308),在所述一号升降杆(308)的另一端铰接有二号升降杆(309),所述二号升降杆(309)的另一端与四号升降杆(310)的一端铰接,所述四号升降杆(310)的中部与三号升降杆(311)的一端铰接,在所述二号升降杆(309)与四号升降杆(310)之间的铰接轴以及四号升降杆(310)与三号升降杆(311)之间的铰接轴上均设置有隔离套筒(312),所述三号升降杆(311)的另一端通过锁紧套筒(1006)与三号锥齿轮(305)的轮毂侧滑动连接,所述四号升降杆(310)用于带动前轮转向模块(6)或后轮驱动模块(8)升降和左右平移,在所述锥齿轮轴(306)以及四号升降杆(310)与三号升降杆(311)之间的隔离套筒(312)上均设置有可分离卡环(313),在两个可分离卡环(313)之间连接有辅助弹簧(314)。6.根据权利要求3所述的可分体多模态轮腿四足机器人,其特征在于:所述轮毂平移模块(10)包括三号固定架(1001)和伸缩杆(1002),所述三号固定架(1001)固定安装在躯体框架模块(1)上,在所述三号固定架(1001)上固定安装有二号电动推杆(1003),所述二号电动推杆(1003)的另一端固定连接有推杆轴(1004),在所述推杆轴(1004)的另一端固定连接有分离拨杆(1005),所述分离拨杆(1005)的另一端卡装在锁紧套筒(1006)上的凹槽内,所述锁紧套筒(1006)滑动设置在锥齿轮轴(306)上,所述三号升降杆(311)固定连接在锁紧套筒(1006)上,当所述锁紧套筒(1006)与三号锥齿轮(305)轮毂侧的限位槽配合时,其可与三号锥齿轮(305)一同转动,当锁紧套筒(1006)滑动至另一侧时,锁紧套筒(1006)与三号锥齿轮(305)分离,锁紧套筒(1006)与l型固定架(307)上的锁紧槽配合,可实现锁紧套筒(1006)的锁紧;所述伸缩杆(1002)滑动设置在连接管(102)上,所述伸缩杆(1002)的下端与前轮转向模块(6)或后轮驱动模块(8)固定连接。7.根据权利要求2所述的可分体多模态轮腿四足机器人,其特征在于:所述前轮转向模块(6)包括两个一号安装架(601),在所述一号安装架(601)上安装有滚轮(602),在所述一号安装架(601)的上端转动连接有一号连接杆(603),两个一号连接杆(603)分别与一号连接座(604)的两端固定连接,在所述一号连接座(604)的中部固定连接有转向电机(605),在所述一号安装架(601)的内侧固定连接有t型套筒(606),在所述t型套筒(606)的竖直杆上转动连接有转向短杆(607),两个所述转向短杆(607)分别与转向长杆(608)的两端转动连接,所述转向长杆(608)的中部与所述转向电机(605)的输出轴固定连接,所述一号连接杆(603)与对应的伸缩杆(1002)固定连接,所述一号连接座(604)与对应的四号升降杆(310)转动连接。8.根据权利要求2所述的可分体多模态轮腿四足机器人,其特征在于:所述后轮驱动模块(8)包括两个二号安装架(801),在所述二号安装架(801)内安装有无刷轮毂电机(802),在所述二号安装架(801)的上端固定连接有二号连接杆(803),两个二号连接杆(803)分别与二号连接座(804)的两端固定连接,所述二号连接杆(803)与对应的伸缩杆(1002)固定连
接,所述二号连接座(804)与对应的四号升降杆(310)转动连接。9.根据权利要求3所述的可分体多模态轮腿四足机器人,其特征在于:所述躯体框架模块(1)还包括外壳(103),所述外壳(103)包裹在四个连接管(102)上。10.根据权利要求3所述的可分体多模态轮腿四足机器人,其特征在于:所述一号分离体(01)和二号分离体(02)还包括电磁铁模块(11),所述电磁铁模块(11)包括电磁铁固定架(1101)和电磁铁(1102),所述电磁铁(1102)安装在电磁铁固定架(1101)上,所述电磁铁固定架(1101)安装在左右两侧的连接管(102)之间,并与连接管(102)固定连接,所述控制板(4)安装在电磁铁固定架(1101)上,所述控制板(4)包括4g模块和gps模块,所述4g模块用于进行远程数据传输,所述gps模块用于实现精准定位。
技术总结
本发明属于机器人技术领域,具体涉及一种可分体多模态轮腿四足机器人,由一号分离体和二号分离体组成,所述一号分离体和二号分离体均可实现单独作业,所述一号分离体和二号分离体均包括躯体框架模块、支腿模块、平行四杆模块、控制板、电池和轮毂平移模块,所述一号分离体还包括前轮转向模块和图像采集模块,所述二号分离体还包括后轮驱动模块,所述一号分离体和二号分离体通过左右两侧的锁紧与释放模块实现分离与组合。本发明可进行分离,从而同时进行多个地点的勘探,极大提高了工作效率,并且在受到外部打击后,完整一侧的躯体在分离的同时,向远程发送受损状况和位置信息给操作员,之后继续执行系统设定任务。之后继续执行系统设定任务。之后继续执行系统设定任务。
技术研发人员:张金柱
受保护的技术使用者:太原理工大学
技术研发日:2022.04.15
技术公布日:2022/7/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。