呼吸系统
(本技术是申请日为2020年2月21日、申请号为2020800152900、发明名称为“呼吸治疗中的可调节呼气释放”的申请的分案申请。)
技术领域
1.本披露涉及使用流量治疗设备向患者输送气体的用于流量治疗的方法和系统。本技术要求2019年2月22日提交的临时申请us62/809099的优先权,该临时申请的全部内容通过援引并入本文。
背景技术:
2.呼吸辅助设备在各种环境(比如医院、医疗设施、住院护理或家庭环境)中用于向用户或患者输送气体流。呼吸辅助设备或流量治疗设备可以包括加湿设备,该加湿设备用于输送经加热和加湿的气体。设备可以任选地包括用于随气体流动输送氧气的阀。流量治疗设备可以允许调节和控制气体流的特性,包括流速、温度、气体浓度、湿度、压力等。传感器(比如加热的温度感测元件和/或热敏电阻)用于测量气体的这些性质。
技术实现要素:
3.流量治疗设备中呼吸气体的流量可以基于检测到的患者呼吸循环而被调节。气体的流量可以被调节,使得呼气期间输送的流量低于吸气期间输送的流量。调节可以改善患者的舒适度。系统可以使流速与检测到的患者呼吸循环同步。流速变化的幅度可以部分地基于用户选择的值。流速可以通过使用正反馈系统控制马达速度来调节。流速的调节也可以由控制器限制,从而防止流速跨过可以变化的最小和/或最大阈值。可以对马达速度进行调节,即正反馈,这可以引起流速的调节。
4.当患者正呼气时,(多个)阈值或(多个)极限可以确保设备向患者始终维持至少最小的流速,同时还提供呼气流量释放。维持阈值可以确保流速不会超出用于呼吸治疗的、特别是用于高流量治疗的临床相关或有效值和/或安全极限。设备的用户(比如临床医生和/或患者)也可以调节流速的变化值。用户调节可以允许用户选择患者觉得最舒适的流量释放的值。
5.在一种配置中,一种用于向患者输送呼吸治疗的呼吸系统,该系统被配置为根据患者吸气和呼气调节输送到患者的气体的流速,该呼吸系统可以包括流动发生器,该流动发生器被配置为产生气体的流速;控制器,该控制器与一个或多个传感器处于电通信并且被配置为:基于从该一个或多个传感器接收的信息确定该患者吸气和呼气的循环;以及部分地基于患者吸气和呼气的循环调节气体的流速,其中,该调节通过部分地基于该患者吸气和呼气的循环期间由一个或多个传感器测量的最大和/或最小流速确定的参数而被减弱。
6.在一种配置中,流动发生器可以包括马达。
7.在一种配置中,通过输出马达控制信号来调节流速。
8.在一种配置中,马达可以包括无刷直流马达。
9.在一种配置中,可以基于由控制器接收的第一输入和第二输入确定患者吸气和呼气的循环,该第一输入和该第二输入与气体流特性或该系统的部件的性能有关。
10.在一种配置中,第一输入可以对应于来自该一个或多个传感器的流速。
11.在一种配置中,第二输入可以对应于来自该一个或多个传感器的气体流的压力。在一种配置中,第二输入可以对应于马达的速度。
12.在一种配置中,可以至少部分地基于一个或多个马达参数来确定马达的速度。
13.在一种配置中,由该一个或多个传感器测量的最大和/或最小流速可以是对患者吸气和呼气的无限制响应。
14.在一种配置中,调节可以通过将该一个或多个传感器测量的最大和/或最小流速与最大和/或最小阈值进行比较而被进一步减弱。
15.在一种配置中,由该一个或多个传感器测量的最大和/或最小流速可以逐渐由负反馈项限制。
16.在一种配置中,该参数可以包括该负反馈项,该负反馈项可以响应于测量的最大和/或最小流速而逐渐增加,直到测量的最大和/或最小流速不再超过该最大和/或最小阈值。
17.在一种配置中,最大和/或最小阈值可以由用户设定。
18.在一种配置中,该系统包括用户界面,该用户界面被配置为接收用户输入以调节最大和/或最小阈值。
19.在一种配置中,最大和/或最小阈值可以是呼吸治疗的临床相关极限。
20.在一种配置中,最小阈值可以在0-5lpm之间。在一种配置中,最小阈值可以在5-10lpm之间。在一种配置中,最小阈值可以在10-15lpm之间。在一种配置中,最小阈值可以在15-20lpm之间。在一种配置中,最小阈值可以在20-25lpm之间。在一种配置中,最小阈值可以在25-30lpm之间。在一种配置中,最小阈值可以在30-35lpm之间。在一种配置中,最小阈值可以在35-40lpm之间。在一种配置中,最小阈值可以在40-45lpm之间。在一种配置中,最小阈值可以在45-50lpm之间。在一种配置中,最小阈值可以在50-55lpm之间。在一种配置中,最小阈值可以在55-60lpm之间。
21.在一种配置中,最大阈值可以在20-25lpm之间。在一种配置中,最大阈值可以在25-30lpm之间。在一种配置中,最大阈值可以在30-35lpm之间。在一种配置中,最大阈值可以在35-40lpm之间。在一种配置中,最大阈值可以在40-45lpm之间。在一种配置中,最大阈值可以在45-50lpm之间。在一种配置中,最大阈值可以在50-55lpm之间。在一种配置中,最大阈值可以在55-60lpm之间。在一种配置中,最大阈值可以在60-65lpm之间。在一种配置中,最大阈值可以在65-70lpm之间。在一种配置中,最大阈值可以在70-75lpm之间。在一种配置中,最大阈值可以在75-80lpm之间。在一种配置中,最大阈值可以在80-85lpm之间。在一种配置中,最大阈值可以在85-90lpm之间。在一种配置中,最大阈值可以在90-95lpm之间。在一种配置中,最大阈值可以在95-100lpm之间。
22.在一种配置中,最大和/或最小阈值可以是呼吸治疗的安全极限。
23.在一种配置中,最大和/或最小阈值可以取决于选择的流速。
24.在一种配置中,最大和/或最小阈值可以是高于和低于所选择的流速的预定百分
比或值。
25.在一种配置中,最大和/或最小阈值可以取决于选择的流速和选择的呼吸同步设置。
26.在一种配置中,该系统可以包括用户界面,该用户界面被配置为接收用户输入以调节呼吸同步设置。
27.在一种配置中,呼吸同步设置可以包括一系列数字。在一种配置中,呼吸同步设置可以包括多个类别,该多个类别至少包括低设置和高设置。
28.在一种配置中,最大和/或最小阈值可以是高于和低于所选择的流速的预定百分比或值,该百分比或值基于所选择的呼吸同步设置而变化。
29.在一种配置中,调节可以被反复地执行。
30.在一种配置中,调节可以包括当患者正吸气时流速的增加。
31.在一种配置中,调节可以包括当患者正呼气时流速的降低。
32.在一种配置中,该一个或多个传感器可以包括超声波换能器组件。
33.在一种配置中,该一个或多个传感器可以包括加热的温度感测元件。
34.在一种配置中,该系统可以是高流量呼吸系统。
35.在一种配置中,该系统可以包括非密封的患者接口。
36.在一种配置中,该非密封的患者接口可以包括非密封的鼻插管。
37.在一种配置中,一种用于向患者输送呼吸治疗的呼吸系统,该系统被配置为根据患者吸气和呼气调节输送到患者的气体的流速,该呼吸系统可以包括流动发生器,该流动发生器被配置为产生气体的流速;以及控制器,该控制器与一个或多个传感器处于电通信,并且该控制器被配置为:基于从该一个或多个传感器接收的信息确定该患者吸气和呼气的循环;以及部分地基于患者吸气和呼气的循环调节流速,其中,该调节可以通过将该一个或多个传感器测量的最大和/或最小流速与最大和/或最小阈值进行比较而被减弱。
38.在一种配置中,流动发生器可以包括马达。
39.在一种配置中,通过输出马达控制信号来调节流速。
40.在一种配置中,马达可以包括无刷直流马达。
41.在一种配置中,可以基于由控制器接收的第一输入和第二输入确定患者吸气和呼气的循环,该第一输入和该第二输入与气体流特性或该系统的部件的性能有关。
42.在一种配置中,第一输入可以对应于来自该一个或多个传感器的流速。
43.在一种配置中,第二输入可以对应于来自该一个或多个传感器的气体流的压力。在一种配置中,第二输入可以对应于马达的速度。
44.在一种配置中,可以至少部分地基于一个或多个马达参数来确定马达的速度。
45.在一种配置中,最大和/或最小阈值可以由用户设定。
46.在一种配置中,该系统包括用户界面,该用户界面被配置为接收用户输入以调节最大和/或最小阈值。
47.在一种配置中,最大和/或最小阈值可以是呼吸治疗的临床相关极限。
48.在一种配置中,最小阈值可以在0-5lpm之间。在一种配置中,最小阈值可以在5-10lpm之间。在一种配置中,最小阈值可以在10-15lpm之间。在一种配置中,最小阈值可以在15-20lpm之间。在一种配置中,最小阈值可以在20-25lpm之间。在一种配置中,最小阈值可
以在25-30lpm之间。在一种配置中,最小阈值可以在30-35lpm之间。在一种配置中,最小阈值可以在35-40lpm之间。在一种配置中,最小阈值可以在40-45lpm之间。在一种配置中,最小阈值可以在45-50lpm之间。在一种配置中,最小阈值可以在50-55lpm之间。在一种配置中,最小阈值可以在55-60lpm之间。
49.在一种配置中,最大阈值可以在20-25lpm之间。在一种配置中,最大阈值可以在25-30lpm之间。在一种配置中,最大阈值可以在30-35lpm之间。在一种配置中,最大阈值可以在35-40lpm之间。在一种配置中,最大阈值可以在40-45lpm之间。在一种配置中,最大阈值可以在45-50lpm之间。在一种配置中,最大阈值可以在50-55lpm之间。在一种配置中,最大阈值可以在55-60lpm之间。在一种配置中,最大阈值可以在60-65lpm之间。在一种配置中,最大阈值可以在65-70lpm之间。在一种配置中,最大阈值可以在70-75lpm之间。在一种配置中,最大阈值可以在75-80lpm之间。在一种配置中,最大阈值可以在80-85lpm之间。在一种配置中,最大阈值可以在85-90lpm之间。在一种配置中,最大阈值可以在90-95lpm之间。在一种配置中,最大阈值可以在95-100lpm之间。
50.在一种配置中,最大和/或最小阈值可以是呼吸治疗的安全极限。
51.在一种配置中,最大和/或最小阈值可以取决于选择的流速。
52.在一种配置中,最大和/或最小阈值可以是高于和低于所选择的流速的预定百分比或值。
53.在一种配置中,最大和/或最小阈值可以取决于选择的流速和选择的呼吸同步设置。
54.在一种配置中,该系统可以包括用户界面,该用户界面被配置为接收用户输入以调节呼吸同步设置。
55.在一种配置中,呼吸同步设置可以包括一系列数字。在一种配置中,呼吸同步设置可以包括多个类别,该多个类别至少包括低设置和高设置。
56.在一种配置中,最大和/或最小阈值可以是高于和低于所选择的流速的预定百分比或值,该百分比或值基于所选择的呼吸同步设置而变化。
57.在一种配置中,调节可以被反复地执行。
58.在一种配置中,每个调节可以由部分地基于该一个或多个传感器测量的最大和/或最小流速确定的参数限制。
59.在一种配置中,由该一个或多个传感器测量的最大和/或最小流速可以是对患者吸气和呼气的无限制响应。
60.在一种配置中,由该一个或多个传感器测量的最大和/或最小流速可以逐渐由负反馈项限制。
61.在一种配置中,该参数可以包括该负反馈项,该负反馈项可以响应于测量的最大和/或最小流速而逐渐增加,直到测量的最大和/或最小流速不再超过该最大和/或最小阈值。
62.在一种配置中,调节可以包括当患者正吸气时流速的增加。
63.在一种配置中,调节可以包括当患者正呼气时流速的降低。
64.在一种配置中,该一个或多个传感器可以包括超声波换能器组件。
65.在一种配置中,该一个或多个传感器可以包括加热的温度感测元件。
66.在一种配置中,该系统可以是高流量呼吸系统。
67.在一种配置中,该系统可以包括非密封的患者接口。
68.在一种配置中,该非密封的患者接口可以包括非密封的鼻插管。
69.在一种配置中,一种使用呼吸系统根据患者吸气和呼气调节输送到患者的气体的流速的方法,该呼吸系统包括被配置为产生气体的流速的流动发生器,该方法可以包括使用呼吸系统的控制器:基于从呼吸系统的一个或多个传感器接收的信息确定患者的吸气和呼气的循环;以及部分地基于吸气和呼气的循环调节流速,其中,该调节可以通过部分地基于在吸气和呼气的循环期间该一个或多个传感器测量的最大和/或最小流速确定的参数而被减弱。
70.在一种配置中,流动发生器可以包括马达。
71.在一种配置中,通过输出马达控制信号来调节流速。
72.在一种配置中,马达可以包括无刷直流马达。
73.在一种配置中,该确定可以基于由控制器接收的第一输入和第二输入确定患者吸气和呼气的循环,该第一输入和该第二输入与气体流特性或该系统的部件的性能有关。
74.在一种配置中,第一输入可以对应于来自该一个或多个传感器的流速。
75.在一种配置中,第二输入可以对应于来自该一个或多个传感器的气体流的压力。在一种配置中,第二输入可以对应于马达的速度。
76.在一种配置中,该方法可以进一步包括至少部分地基于一个或多个马达参数确定马达的速度。
77.在一种配置中,由该一个或多个传感器测量的最大和/或最小流速可以是对患者吸气和呼气的无限制响应。
78.在一种配置中,调节可以通过将该一个或多个传感器测量的最大和/或最小流速与最大和/或最小阈值进行比较而被进一步减弱。
79.在一种配置中,由该一个或多个传感器测量的最大和/或最小流速可以逐渐由负反馈项限制。
80.在一种配置中,该参数可以包括该负反馈项,该负反馈项可以响应于测量的最大和/或最小流速而逐渐增加,直到测量的最大和/或最小流速不再超过该最大和/或最小阈值。
81.在一种配置中,最大和/或最小阈值可以由用户设定。
82.在一种配置中,该系统包括用户界面,该用户界面被配置为接收用户输入以调节最大和/或最小阈值。
83.在一种配置中,最大和/或最小阈值可以是呼吸治疗的临床相关极限。
84.在一种配置中,最小阈值可以在0-5lpm之间。在一种配置中,最小阈值可以在5-10lpm之间。在一种配置中,最小阈值可以在10-15lpm之间。在一种配置中,最小阈值可以在15-20lpm之间。在一种配置中,最小阈值可以在20-25lpm之间。在一种配置中,最小阈值可以在25-30lpm之间。在一种配置中,最小阈值可以在30-35lpm之间。在一种配置中,最小阈值可以在35-40lpm之间。在一种配置中,最小阈值可以在40-45lpm之间。在一种配置中,最小阈值可以在45-50lpm之间。在一种配置中,最小阈值可以在50-55lpm之间。在一种配置中,最小阈值可以在55-60lpm之间。
85.在一种配置中,最大阈值可以在20-25lpm之间。在一种配置中,最大阈值可以在25-30lpm之间。在一种配置中,最大阈值可以在30-35lpm之间。在一种配置中,最大阈值可以在35-40lpm之间。在一种配置中,最大阈值可以在40-45lpm之间。在一种配置中,最大阈值可以在45-50lpm之间。在一种配置中,最大阈值可以在50-55lpm之间。在一种配置中,最大阈值可以在55-60lpm之间。在一种配置中,最大阈值可以在60-65lpm之间。在一种配置中,最大阈值可以在65-70lpm之间。在一种配置中,最大阈值可以在70-75lpm之间。在一种配置中,最大阈值可以在75-80lpm之间。在一种配置中,最大阈值可以在80-85lpm之间。在一种配置中,最大阈值可以在85-90lpm之间。在一种配置中,最大阈值可以在90-95lpm之间。在一种配置中,最大阈值可以在95-100lpm之间。
86.在一种配置中,最大和/或最小阈值可以是呼吸治疗的安全极限。
87.在一种配置中,最大和/或最小阈值可以取决于选择的流速。
88.在一种配置中,最大和/或最小阈值可以是高于和低于所选择的流速的预定百分比或值。
89.在一种配置中,最大和/或最小阈值可以取决于选择的流速和选择的呼吸同步设置。
90.在一种配置中,该系统可以包括用户界面,该用户界面被配置为接收用户输入以调节呼吸同步设置。
91.在一种配置中,呼吸同步设置可以包括一系列数字。在一种配置中,呼吸同步设置可以包括多个类别,该多个类别至少包括低设置和高设置。
92.在一种配置中,最大和/或最小阈值可以是高于和低于所选择的流速的预定百分比或值,该百分比或值基于所选择的呼吸同步设置而变化。
93.在一种配置中,调节可以被反复地执行。
94.在一种配置中,调节可以包括当患者正吸气时流速的增加。
95.在一种配置中,调节可以包括当患者正呼气时流速的降低。
96.在一种配置中,该一个或多个传感器可以包括超声波换能器组件。
97.在一种配置中,该一个或多个传感器可以包括加热的温度感测元件。
98.在一种配置中,该系统可以是高流量呼吸系统。
99.在一种配置中,该系统可以包括非密封的患者接口。
100.在一种配置中,该非密封的患者接口可以包括非密封的鼻插管。
101.在一种配置中,一种使用呼吸系统根据患者吸气和呼气调节输送到患者的气体的流速的方法,该呼吸系统包括被配置为产生气体的流速的流动发生器,该方法可以包括使用呼吸系统的控制器:基于从该一个或多个传感器接收的信息确定患者吸气和呼气的循环;以及至少部分地基于患者吸气和呼气的循环调节流速,其中,该调节可以通过将该一个或多个传感器测量的最大和/或最小流速与最大和/或最小阈值进行比较而被减弱。
102.在一种配置中,流动发生器可以包括马达。
103.在一种配置中,通过输出马达控制信号来调节流速。
104.在一种配置中,马达可以包括无刷直流马达。
105.在一种配置中,该确定可以基于由控制器接收的第一输入和第二输入确定患者吸气和呼气的循环,该第一输入和该第二输入与气体流特性或该系统的部件的性能有关。
106.在一种配置中,第一输入可以对应于来自该一个或多个传感器的流速。
107.在一种配置中,第二输入可以对应于来自该一个或多个传感器的气体流的压力。在一种配置中,第二输入可以对应于马达的速度。
108.在一种配置中,该方法可以进一步包括至少部分地基于一个或多个马达参数确定马达的速度。
109.在一种配置中,最大和/或最小阈值可以由用户设定。
110.在一种配置中,该系统包括用户界面,该用户界面被配置为接收用户输入以调节最大和/或最小阈值。
111.在一种配置中,最大和/或最小阈值可以是呼吸治疗的临床相关极限。
112.在一种配置中,最小阈值可以在0-5lpm之间。在一种配置中,最小阈值可以在5-10lpm之间。在一种配置中,最小阈值可以在10-15lpm之间。在一种配置中,最小阈值可以在15-20lpm之间。在一种配置中,最小阈值可以在20-25lpm之间。在一种配置中,最小阈值可以在25-30lpm之间。在一种配置中,最小阈值可以在30-35lpm之间。在一种配置中,最小阈值可以在35-40lpm之间。在一种配置中,最小阈值可以在40-45lpm之间。在一种配置中,最小阈值可以在45-50lpm之间。在一种配置中,最小阈值可以在50-55lpm之间。在一种配置中,最小阈值可以在55-60lpm之间。
113.在一种配置中,最大阈值可以在20-25lpm之间。在一种配置中,最大阈值可以在25-30lpm之间。在一种配置中,最大阈值可以在30-35lpm之间。在一种配置中,最大阈值可以在35-40lpm之间。在一种配置中,最大阈值可以在40-45lpm之间。在一种配置中,最大阈值可以在45-50lpm之间。在一种配置中,最大阈值可以在50-55lpm之间。在一种配置中,最大阈值可以在55-60lpm之间。在一种配置中,最大阈值可以在60-65lpm之间。在一种配置中,最大阈值可以在65-70lpm之间。在一种配置中,最大阈值可以在70-75lpm之间。在一种配置中,最大阈值可以在75-80lpm之间。在一种配置中,最大阈值可以在80-85lpm之间。在一种配置中,最大阈值可以在85-90lpm之间。在一种配置中,最大阈值可以在90-95lpm之间。在一种配置中,最大阈值可以在95-100lpm之间。
114.在一种配置中,最大和/或最小阈值可以是呼吸治疗的安全极限。
115.在一种配置中,最大和/或最小阈值可以取决于选择的流速。
116.在一种配置中,最大和/或最小阈值可以是高于和低于所选择的流速的预定百分比或值。
117.在一种配置中,最大和/或最小阈值可以取决于选择的流速和选择的呼吸同步设置。
118.在一种配置中,该系统可以包括用户界面,该用户界面被配置为接收用户输入以调节呼吸同步设置。
119.在一种配置中,呼吸同步设置可以包括一系列数字。在一种配置中,呼吸同步设置可以包括多个类别,该多个类别至少包括低设置和高设置。
120.在一种配置中,最大和/或最小阈值可以是高于和低于所选择的流速的预定百分比或值,该百分比或值基于所选择的呼吸同步设置而变化。
121.在一种配置中,调节可以被反复地执行。
122.在一种配置中,每个调节可以由部分地基于该一个或多个传感器测量的最大和/
或最小流速确定的参数限制。
123.在一种配置中,由该一个或多个传感器测量的最大和/或最小流速可以是对患者吸气和呼气的无限制响应。
124.在一种配置中,由该一个或多个传感器测量的最大和/或最小流速可以逐渐由负反馈项限制。
125.在一种配置中,该参数可以包括该负反馈项,该负反馈项可以响应于测量的最大和/或最小流速而逐渐增加,直到测量的最大和/或最小流速不再超过该最大和/或最小阈值。
126.在一种配置中,调节可以包括当患者正吸气时流速的增加。
127.在一种配置中,调节可以包括当患者正呼气时流速的降低。
128.在一种配置中,该一个或多个传感器可以包括超声波换能器组件。
129.在一种配置中,该一个或多个传感器可以包括加热的温度感测元件。
130.在一种配置中,该系统可以是高流量呼吸系统。
131.在一种配置中,该系统可以包括非密封的患者接口。
132.在一种配置中,该非密封的患者接口可以包括非密封的鼻插管。
133.在一种配置中,一种用于向患者输送呼吸治疗的呼吸系统,该系统被配置为根据患者吸气和呼气调节输送到患者的气体的流速,该呼吸系统可以包括流动发生器,该流动发生器带有马达,用于产生气体流;以及控制器,该控制器与一个或多个传感器处于电通信,并且该控制器被配置为:使得在该呼吸系统的用户界面上显示呼气释放水平设置;接收第一用户输入以增加和/或减小呼气释放水平;使得在该用户界面上显示最大和/或最小流速阈值设置;接收第二用户输入以增加和/或减小该最大和/或最小流速阈值;以及基于第一用户输入和第二用户输入调节流速,其中,该第一用户输入可以被配置为部分地基于患者吸气和呼气的循环允许对流速进行调节,以及该第二用户输入可以被配置为基于第一用户输入通过将该一个或多个传感器测量的最大和/或最小流速与最大和/或最小阈值进行比较而减弱该调节。
134.在一种配置中,第一用户输入可以被配置为部分地基于该患者吸气和呼气的循环通过打开和/或关闭该呼气释放、和/或调节该呼气释放的幅度而允许对该流速进行调节。
135.在一种配置中,呼气释放水平设置可以包括多个不同的呼气释放水平。
136.在一种配置中,该多个不同的呼气释放水平可以包括多个类别,该多个类别至少包括低呼气释放水平和高呼气释放水平。在一种配置中,该多个不同的呼气释放水平可以包括一系列数字。在一种配置中,该多个不同的呼气释放水平可以包括滑动标度。
137.在一种配置中,第一用户输入可以经由用户界面上的按钮被接收。
138.在一种配置中,患者可以访问呼气释放水平设置。
139.在一种配置中,患者无法访问最大和/或最小流速阈值设置。
140.在一种配置中,临床医生或技术人员可以访问最大和/或最小流速阈值设置。
141.在一种配置中,该系统可以是高流量呼吸系统。
142.在一种配置中,该系统可以包括非密封的患者接口。
143.在一种配置中,该非密封的患者接口可以包括非密封的鼻插管。
144.在一种配置中,这些呼气释放水平可以影响如在本文披露的任何配置中应用的对
流速的调节的负反馈。
145.在一种配置中,一种用于向患者输送呼吸治疗的呼吸系统,该系统被配置为根据患者吸气和呼气调节输送到患者的气体的流速,该呼吸系统可以包括流动发生器,该流动发生器带有马达,用于产生气体流;以及控制器,该控制器与一个或多个传感器处于电通信,并且该控制器被配置为:使得在该呼吸系统的用户界面上显示呼气释放水平设置,该设置包括多个不同的呼气释放水平;经由该用户界面接收用户输入以增加和/或减小呼气释放水平;以及基于用户输入调节流速,其中,该用户输入可以被配置为部分地基于患者吸气和呼气的循环允许对流速进行调节。
146.在一种配置中,用户输入可以被配置为部分地基于该患者吸气和呼气的循环通过打开和/或关闭该呼气释放、和/或调节该呼气释放的幅度而允许对该流速进行调节。
147.在一种配置中,该多个不同的呼气释放水平可以包括多个类别,该多个类别至少包括低呼气释放水平和高呼气释放水平。在一种配置中,该多个不同的呼气释放水平可以包括一系列数字。在一种配置中,该多个不同的呼气释放水平可以包括滑动标度。
148.在一种配置中,第一用户输入可以经由用户界面上的按钮被接收。
149.在一种配置中,控制器被进一步配置为基于用户输入通过将该一个或多个传感器测量的最大和/或最小流速与最大和/或最小流速阈值进行比较来减弱调节。
150.在一种配置中,该系统可以是高流量呼吸系统。
151.在一种配置中,该系统可以包括非密封的患者接口。
152.在一种配置中,该非密封的患者接口可以包括非密封的鼻插管。
153.在一种配置中,这些呼气释放水平可以影响如在本文披露的任何配置中应用的对流速的调节的负反馈。
154.在一种配置中,一种用于向患者输送呼吸治疗的呼吸系统,该系统被配置为根据患者吸气和呼气调节输送到患者的气体的流速,该呼吸系统可以包括流动发生器,该流动发生器带有马达,用于产生气体流;以及控制器,该控制器与一个或多个传感器处于电通信,并且该控制器被配置为:使得在该用户界面上显示最大和/或最小流速阈值设置;接收用户输入以增加和/或减小该最大和/或最小流速阈值;以及基于用户输入调节流速,其中,该用户输入可以被配置为基于患者吸气和呼气的循环通过将该一个或多个传感器测量的最大和/或最小流速与最大和/或最小阈值进行比较来减弱对流速的调节。
155.在一种配置中,用户输入可以经由用户界面上的按钮被接收。
156.在一种配置中,患者无法访问最大和/或最小流速阈值设置。
157.在一种配置中,临床医生或技术人员可以访问最大和/或最小流速阈值设置。
158.在一种配置中,最大和/或最小流速阈值可以影响如在本文披露的任何配置中应用的对流速的调节的负反馈项。
159.在一种配置中,控制器可以被配置为基于患者吸气和呼气的循环通过接收由用户设定的呼气释放水平来调节流速。
160.在一种配置中,控制器可以被配置为使得在用户界面上显示多个不同的呼气释放水平。
161.在一种配置中,该多个不同的呼气释放水平可以包括多个类别,该多个类别至少包括低呼气释放水平和高呼气释放水平。在一种配置中,该多个不同的呼气释放水平可以
包括一系列数字。在一种配置中,该多个不同的呼气释放水平可以包括滑动标度。
162.在一种配置中,患者可以访问呼气释放水平设置。
163.在一种配置中,该系统可以是高流量呼吸系统。
164.在一种配置中,该系统可以包括非密封的患者接口。
165.在一种配置中,该非密封的患者接口可以包括非密封的鼻插管。
附图说明
166.参考某些实施例的附图来描述本披露内容的这些和其他特征、方面和优点,这些附图旨在示意性地展示某些实施例而不是限制本披露内容。
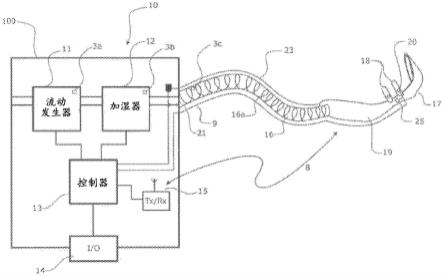
167.图1a示意性地展示了被配置为向患者提供呼吸治疗的高流量呼吸系统。
168.图1b是加湿室处于适当位置的示例性高流量治疗设备的前立体图。
169.图1c是图1b的高流量治疗设备的后立体图。
170.图2a展示了与流量治疗设备的部件相互作用和/或向其提供控制和方向的控制系统的示例性框图。
171.图2b展示了与流量治疗设备的部件相互作用和/或向其提供控制和方向的控制系统的示例性框图。
172.图2c展示了示例性控制器的框图。
173.图3a展示了示例性马达/传感器模块的框图。
174.图3b展示了流量治疗设备的示例性感测室。
175.图4展示了用于调节流量治疗设备的操作的示例性过程的流程图。
176.图5展示了用于为流量治疗设备执行呼吸循环增强的示例性系统的框图。
177.图6展示了呼吸循环增强期间流量治疗设备的示例性马达速度和流速。
178.图7a至图7c展示了示出目标流速和/或呼气释放设置的示例性用户界面显示器或其部分。
178.图8以图解形式示出了另一个流量治疗系统。
178.图9是闭环控制系统的示意图。
具体实施方式
179.尽管下文描述某些示例,但本领域技术人员将了解,本披露内容延伸超出具体披露的示例和/或用途以及其明显的修改和等效物。因此,意图是本文所披露的披露内容的范围不应受到以下描述的任何特定示例的限制。
180.在图1a中提供了高流量呼吸系统10的示意性表示。呼吸系统10可以包括主装置壳体100。主装置壳体100可以包含流动发生器11、任选的加湿器或加湿室12、控制器13和用户界面14,该流动发生器可以是马达/叶轮布置(比如鼓风机)形式。用户界面14可以包括显示器以及一个或多个输入装置,比如一个或多个按钮、触摸屏、触摸屏与一个或多个按钮的组合等。控制器13可以包括一个或多个硬件和/或软件处理器,并且可以被配置或编程为控制设备的部件,包括但不限于操作流动发生器11以产生输送到患者的气体流,操作加湿器12(如果存在)以加湿和/或加热气体流,从用户界面14接收用户输入以便对呼吸系统10进行重新配置和/或用户定义的操作、以及(例如,在显示器上)向用户输出信息。用户可以是患
者、保健专业人员、或使用系统10的任何人。
181.继续参考图1a,患者呼吸导管16可以联接到呼吸系统10的主装置壳体100中的气体流出口21,并且联接到患者接口17。患者接口可以是非密封接口,像具有歧管19和鼻叉18的鼻插管,用于提供高流量治疗。患者呼吸导管16还可以联接到密封接口,像面罩、鼻罩或鼻枕罩。患者接口还可以任选地包括气管内管、气管造口术接口、或其他。
182.气体流可以由流动发生器11产生,并且可以在经由患者导管16通过患者接口17输送到患者之前被加湿。控制器13可以控制流动发生器11以产生期望流速的气体流,和/或控制一个或多个阀以控制空气和氧气或其他可呼吸气体的混合。控制器13可以控制加湿室12中的加热元件(如果存在)将气体加热至期望的温度,该期望的温度实现用于递送至患者的温度和/或湿度的期望的水平。患者导管16可以具有加热元件16a,比如加热丝,以加热穿行至患者的气体流。加热元件16a也可以受控制器13的控制。
183.系统10可以使用与控制器13通信的(多个)流速传感器、(多个)压力传感器、(多个)温度传感器、(多个)湿度传感器或其他传感器,以监测气体流的特性和/或以提供合适治疗的方式操作系统10。超声波换能器和加热的温度感测元件是可以用于测量流速、以及其他参数的传感器的示例。气体流特性可以包括气体浓度、流速、压力、温度、湿度或其他。传感器3a、3b、3c、20、25(比如压力传感器、温度传感器、湿度传感器和/或流速传感器)可以放置在主装置壳体100、患者导管16和/或患者接口17中的不同位置。控制器13可以接收来自传感器的输出,以帮助其以提供合适治疗的方式来操作呼吸系统10,以便确定气体流的合适的目标温度、流速和/或压力。提供合适治疗可以包括满足患者的吸气需求。
184.系统10可以包括无线数据发射器和/或接收器,或者收发器15,以使控制器13能够以无线方式从操作传感器接收数据信号8和/或控制系统10的不同部件。附加地或替代地,数据发射器和/或接收器15可以将数据舒适到远程服务器或实现对系统10的远程控制。系统10还可以包括有线连接,例如使用电缆或导线,以使控制器13能够从操作传感器接收数据信号8和/或控制系统10的不同部件。
185.如本文所用,“高流量”治疗是指以通常满足或超过患者峰值吸气需求的相对高的流速向患者气道施用气体。用于实现“高流量”的流速可以是以下列出的流速中的任一者。例如,在一些配置中,对于成人患者,“高流量治疗”可以是指以以下流速向患者输送气体:大于或等于约10升每分钟(10lpm),比如约10lpm与约100lpm之间、或约15lpm与约95lpm之间、或约20lpm与约90lpm之间、或约25lpm与约85lpm之间、或约30lpm与约80lpm之间、或约35lpm与约75lpm之间、或约40lpm与约70lpm之间、或约45lpm与约65lpm之间、或约50lpm与约60lpm之间。在一些配置中,对于新生儿、婴儿或儿童患者,“高流量治疗”可以指以以下流速向患者输送气体:大于1lpm,比如在约1lpm与约25lpm之间、或在约2lpm与约25lpm之间、或在约2lpm与约5lpm之间、或在约5lpm与约25lpm之间、或在约5lpm与约10lpm之间、或在约10lpm与约25lpm之间、或在约10lpm与约20lpm之间、或在约10lpm与15lpm之间、或在约20lpm与25lpm之间。成年患者,新生儿、婴儿或儿童患者的高流量治疗设备可以以约1lpm与约100lpm之间的流速、或以上述任何子范围内的流速向患者输送气体。
186.图1b和图1c示出了呼吸系统10的示例性流量治疗设备或呼吸装置。装置可以包括壳体300,该壳体包封流动发生器。流动发生器可以包括马达/传感器模块。马达/传感器模块可以是不可从主壳体300上移除的。马达/传感器模块也可以任选地是从主壳体300上可
移除的。壳体300可以包括加湿器或加湿室舱318,该加湿器或加湿室舱用于接纳可移除加湿室310。可移除加湿室310包含合适的液体,比如水,用于加热和加湿输送到患者的气体。加湿室310可以以线性滑入运动进入室舱318而流体地联接到装置壳体300。气体出口端口322可以在马达/传感器模块与室310的入口306之间建立流体连通。
187.经加热和加湿的气体可以从室310的出口308离开进入经加湿的气体回流管340,该经加湿的气体回流管可以包括可移除的l形弯管。可移除的弯管可以进一步包括患者出口端口344,用于联接到吸气导管,比如图1a的吸气导管16,以将气体输送到患者接口17。气体出口端口322、经加湿的气体回流管340和患者出口端口344均可以具有密封件,比如o形环密封件或t形密封件,以在装置壳体300、加湿室310与吸气导管之间提供密封气体通路。壳体300中的加湿室舱318的底板部分可以包括加热器布置(比如加热板或其他合适的加热元件),该加热器布置用于加热加湿室310中的水,以在加湿过程中使用。
188.如图1c中所示,装置可以包括能够使流动发生器将空气、氧气(或替代辅助气体)或其合适的混合物输送到加湿室310并由此输送到患者的布置。这种布置可以包括壳体300的后壁322中的空气入口356’。该装置可以包括单独的氧气(或其他可呼吸气体)入口端口358’。在所展示的配置中,氧气入口端口358’可以被定位成在壳体300后端处邻近该壳体的一侧。氧气端口358’可以连接到氧气源,比如罐。氧气入口端口358’可以与阀处于流体连通。阀可以合适地是电磁阀,其能够控制添加到输送到加湿室310的气体流中的氧气量。
189.壳体300可以包括合适的电子器件板,比如感测电路板。电子器件板可以容纳适合的电气或电子部件或可以与其电通信,该电气或电子部件是比如但不限于微处理器、电容器、电阻器、二极管、运算放大器、比较器、和开关。一个或多个传感器可以与电子器件板一起使用。电子器件板的部件(比如但不限于一个或多个微处理器)可以充当该设备的控制器13。电子器件板中的一个或多个可以与系统10的电气部件(包括但不限于显示单元和用户界面14、马达、阀、和加热板)处于电通信,以操作马达来提供期望的气体流速,加湿和加热气体流至适当的水平,以及向气体流供应适当量的氧气(或适当量的替代性辅助气体)。
190.如上所述,操作传感器(比如流量、温度、湿度和/或压力传感器)可以被放置在呼吸装置、患者导管16和/或插管17中的不同位置。电子器件板可以与这些传感器电通信。来自传感器的输出可以被控制器13接收,以帮助控制器13以提供最佳治疗(包括通常满足吸气需求)的方式操作呼吸系统10。一个或多个传感器(例如,霍尔效应传感器)可以用于测量流动发生器的马达的马达速度。马达可以包括无刷直流马达,从中可以测量马达速度,而无需使用单独的传感器。例如,在无刷直流马达的操作期间,可以从马达的未通电绕组中测量反电动势(back-emf),从中可以确定马达位置,这进而可以用来计算马达转速。此外,可以使用马达驱动器来测量马达电流,该马达电流可以与测量的马达转速一起使用以计算马达转矩。马达也可以包括低惯性马达。
191.室内空气可以通过入口端口(比如图1c中的空气入口端口356’)进入流动发生器。流动发生器可以以大于1,000rpm且小于30,000rpm、大于2,000rpm且小于21,000rpm、或在上述任何值之间的马达速度操作。流动发生器的操作可以混合进入流动发生器的气体,比如通过入口端口进入马达/传感器室的气体。使用流动发生器作为混合器可以减少在具有单独混合器(比如包括挡板的静态混合器)的系统中可能出现的压降,因为混合需要能量。控制系统
192.图2a和图2b展示了示例性控制系统220的框图200,该示例性控制系统可以检测患者状况并控制包括气体源的流量治疗设备的操作。控制系统220可以在流过流量治疗设备的气体被输送到患者时管理该气体的流速。例如,控制系统220可以通过控制流动发生器或鼓风机230的马达速度的输出、或(比如在辅助气体端口中的)阀232的输出来增大或减小流速。如下文所讨论的,控制系统220可以自动地确定针对特定患者的流速的设定值或个性化值。流速可以被控制系统220优化,以改善患者的舒适度和治疗。
193.控制系统220可以生成音频输出238、和/或显示/视觉输出239。例如,流量治疗设备可以包括显示器和/或扬声器。显示器可以向医师指示由控制系统220生成的任何警告或警报。显示器还可以指示医师可以调节的控制参数。例如,控制系统220可以自动地为特定患者推荐流速。控制系统220还可以确定患者的呼吸状态,包括但不限于产生患者的呼吸率,并且将其发送到显示器。
194.控制系统220可以改变加热器控制输出来控制加热元件中的一个或多个(例如,维持输送到患者的气体的温度设定点)。控制系统220还可以改变加热元件的操作或占空比。加热器控制输出可以包括加热器板控制输出234和(多个)经加热的呼吸管控制输出236。
195.控制系统220可以基于一个或多个接收的输入201-216来确定输出230-239。输入201-216可以对应于由控制器自动接收的传感器测量值(如图1a、图2b和图2c中所示)。控制系统220可以接收传感器输入,包括但不限于:(多个)温度传感器输入201、(多个)流速传感器输入202、马达速度输入203、(多个)压力传感器输入204、(多个)气体分数传感器输入205、(多个)湿度传感器输入206、(多个)脉搏血氧仪(例如,spo2)传感器输入207、(多个)存储的参数或用户参数208、占空比或脉冲宽度调制(pwm)输入209、(多个)电压输入210、(多个)电流输入211、(多个)声学传感器输入212、(多个)功率输入213、(多个)电阻输入214、(多个)co2传感器输入215、和/或肺活量计输入216。控制系统220可以接收来自用户的输入或将参数值存储在存储器274中(如图2c中所示)。控制系统220可以在患者治疗期间动态地调节针对患者的流速。控制系统220可以持续地检测系统参数和患者参数。任何其他合适的输入和/或输出可以和控制系统220一起使用。例如,利用(多个)脉搏血氧仪传感器输入207,控制系统220可以实现一个或多个闭环控制系统,以控制气体流中的氧气成分,比如在2018年10月5日提交的、且公开为wo2019/070136的国际申请号pct/nz2018/050137中描述的,该申请的全部内容通过援引并入本文并且包括在附录a中。利用(多个)闭环控制系统,流量治疗设备可以监测患者的血氧饱和度(spo2)并且控制输送到患者的氧气的分数(fdo2)。流量治疗设备还可以自动地调节fdo2,以便达到针对患者的目标spo2值。
196.如图2b中所展示,控制系统220可以从流量治疗设备的多个部件接收输入,比如胸腹异步(taa)传感器输入252、呼吸传感器输入254、呼吸功(wob)传感器输入256、co2和/或压力传感器输入258、用户输入和/或存储的值260。并非图2a中所示的所有输入202-210都可能存在。图2b中的控制系统220可以基于输入252-260输出加热器控制输出262、(多个)流量控制输出264和(多个)显示/音频输出266。输入202至210和输出230至234可能不必都存在。例如,控制系统220可以仅接收wob传感器(比如emg)输入256并且生成流量控制测量值264。取决于配置,对应于输入的部件中的一些部件可以不包括在流量治疗设备中。缺少输入本身可以被控制系统220用来确定输入或系统条件。
197.控制系统220可以包括用于检测输入条件和控制输出条件的编程指令。图2c展示
了示例性控制器270的框图。编程指令可以被存储在控制器270的存储器274中。编程指令可以对应于本文描述的方法、过程和功能。控制系统276可以由控制器270的一个或多个硬件处理器272执行。可以使用c、c 、java或任何其他合适的编程语言来实现编程指令。控制器还可以包括用于接收传感器信号的电路278。控制系统276的一些部分或所有部分可以实现在专用电路278(比如asic和fpga)中。
198.控制器可以进一步包括显示器280,用于发送患者和呼吸辅助系统的状态。显示器280也可以示出警告。控制器还可以经由比如显示器280等用户界面接收用户输入。用户界面可以替代地或附加地包括按钮或拨盘。马达/传感器模块
199.图3a展示了马达/传感器模块2000的框图,其可以用作流量治疗设备的一部分。马达/传感器模块包括流动发生器2001,该流动发生器夹带室内空气以输送到患者。流动发生器2001可以是离心鼓风机。
200.室内空气进入室内空气入口2002,该室内空气入口通过入口端口2003进入流动发生器2001。入口端口2003可以包括阀2004,加压气体可以通过该阀进入流动发生器2001。阀2004可以控制氧气(或其他辅助气体)进入鼓风机2001的流量。阀2004可以是任何类型的阀,包括比例阀或二位阀。入口端口可以不包括阀。
201.流动发生器2001可以以大于1,000rpm且小于30,000rpm、大于2,000rpm且小于25,000rpm、大于3,000rpm且小于24,000rpm、或在上述任何值之间的马达速度操作。流动发生器2001的操作混合通过入口端口2003进入流动发生器2001的气体。使用流动发生器2001作为混合器可以降低在具有单独混合器(比如包括挡板的静态混合器)的系统中可能出现的压降,因为混合需要能量,而流动发生器赋予能量。
202.混合后的空气通过导管2005离开流动发生器2001并且进入感测室2007中的流动路径2006。带有传感器2008的电路板被定位在感测室2007中,使得电路板浸没在气体流中。电路板上的传感器2008被定位在气体流中,以测量流中的气体性质。在穿过感测室2007中的流动路径2006之后,气体离开2009到加湿室310。
203.流动路径2006具有弯曲的形状。气体流在进口2103进入,沿着弯曲的流动路径2104流动,并且在流动路径2105的相反侧离开。进口和出口可以被定位在竖直相反的方向上,并且气体流可以在竖直向上方向上进入路径,然后弯曲到水平方向,然后再次弯曲到竖直向上方向。流动路径可以没有急转弯。流动路径可以具有弯曲端和较直的中间区段。流动路径可以在流动路径的整个长度上维持恒定的截面形状。流动路径可以从流动路径的第一端稍微向内锥形化,并且再次变宽到流动路径的第二端,这可以加速流动,以用于在测量中达到更好准确性、稳定性和再现性。流动路径的表面可以内衬有表面改性剂/润滑剂,以降低流动路径内的摩擦。弯曲流动路径形状可以通过使测量区域与流动路径部分地重合来降低气体流的压降,而不会降低流量测量的灵敏性。可以使用许多不同的流动路径配置。
204.如图3b中所示,混合后的空气可以离开流动发生器并且进入传感器室350中的流动路径356,该传感器室可以位于马达/传感器模块中。具有传感器(比如超声波换能器354和/或加热的温度感测元件)的感测电路板352可以定位在传感器室350中,使得感测电路板至少部分地浸没在气体流中。感测电路板上的至少一些传感器可以定位在气体流中,以测量流中的气体性质。在穿过传感器室350中的流动路径356之后,气体可以离开到加湿室。
205.感测电路板352可以包括传感器,比如声学发射器和/或接收器、湿度传感器、温度传感器、热敏电阻等。可以使用至少两种不同类型的传感器来测量气体流速。第一种类型的传感器可以包括加热的温度感测元件(或热敏电阻),其可以通过监测气体流与加热的温度感测元件之间的热传递来确定流速。当气体在加热的温度感测元件周围流动并经过加热的温度感测元件时,加热的温度感测元件可以在流内以恒定的目标温度运行。传感器可以测量将加热的温度感测元件维持在目标温度所需的功率量。目标温度可以被配置为高于气体流的温度,使得需要更多的功率以更高的流速将加热的温度感测元件维持在目标温度。
206.第二种类型的传感器可以包括声学(比如超声波换能器)传感器组件。包括声学发射器和/或接收器的声学传感器可以用来测量声学信号的飞行时间以确定气体速度和/或成分,这些声学传感器可以在流量治疗设备中使用。在一种超声波感测(包括可以充当发射器和/或接收器的超声波换能器)拓扑中,驱动器使第一传感器(比如超声波换能器)产生第一方向上的超声波脉冲。第二传感器(比如第二超声波换能器)接收此脉冲并且提供该脉冲在第一超声波换能器与第二超声波换能器之间的飞行时间测量值。使用此飞行时间测量值,超声波换能器之间的气体流的声速可以由流量治疗设备的处理器或控制器计算。第二传感器还可以发射、以及第一传感器可以接收在与第一方向相反的第二方向上的脉冲,以提供飞行时间的第二测量值,从而允许确定气流的特性,比如流速或速度。在另一种声学感测拓扑中,由比如超声波换能器的声学发射器发射的声脉冲可以由比如麦克风的声学接收器接收。
207.可以结合来自第一类型传感器和第二类型传感器两者的读数来确定更准确的流量测量值。例如,先前确定的流速和来自一种类型的传感器的一个或多个输出可以用于确定预测的当前流速。然后可以使用来自第一类型传感器和第二类型传感器中的另一个的一个或多个输出来更新预测的当前流速,以便计算最终的流速。基于呼吸循环调节流量
208.一些患者可能会发现基于患者的呼吸循环来调节流量治疗设备的操作更舒适。例如,随着患者吸气和呼气,可以调节由流量治疗设备提供的空气的流速。流速可以在患者的吸气期间增加,而在患者的呼气期间降低。流速可以在患者的吸气期间进行调节(例如,在吸气期间增加),而在患者的呼气期间不进行调节,反之亦然。吸气和呼气也可以称为吸入和呼出。
209.患者的呼吸循环可以被表示为包括交替的吸入阶段和呼出阶段的波形。通过确定和监测患者的呼吸循环波形,可以基于患者的呼吸循环来修改流量治疗设备的操作。例如,流量治疗设备可以被配置为使用周期性波形来控制气体流量,该周期性波形可以基于患者的经测量的呼吸循环波形来调节。
210.图4展示了用于调节流量治疗设备的操作的示例性过程的流程图。在框402处,控制信号用于驱动与流量治疗设备(例如,如图1a中所展示的流动发生器11)相关联的马达。马达可以用于产生空气流,以便辅助患者的呼吸。控制信号可以包括初始波形。初始波形可以包括默认波形,或者基于与患者相关联的一个或多个测量值。
211.在框404处,在控制器处接收多个测量值,这些测量值可以用于确定患者的呼吸循环。这些测量值可以包括流速404a、马达速度404b、压力404c等等。
212.在框406处,接收的测量值用于确定患者的预测呼吸循环。患者的预测呼吸循环可
以通过使用一种或多种不同的技术来确定,比如通过监测流量偏差(例如,与平均或设定点流量值的偏差)、流量限制(例如,如下所讨论)、系统泄漏(即,由鼓风机产生的未流向患者肺部的空气流的一部分)等。
213.继续参考图4,在框408处,基于预测呼吸循环来调节马达的控制信号。例如,控制信号可以被调节,使得流速随着患者吸气而增加,以及随着患者呼气而降低。
214.该过程然后可以返回到框402,在该框处经调节的控制信号用于驱动鼓风机马达以产生用于患者的空气流。
215.该过程还可以实现在具有密封患者接口的呼吸系统上。压力传感器可以放置在流动路径中的任何地方。密封患者接口的非限制性示例是niv罩。niv罩可以贴着患者的脸密封,使得基本上没有系统泄漏。这使得可以在患者端附近或在患者端处测量输送到患者的气体的压力。例如,压力传感器可以定位在niv罩内或患者鼻孔外的位置处。压力传感器可以定位在将niv罩连接到患者呼吸导管(比如图1a中所示的患者呼吸导管16)的歧管中。
216.图5展示了用于在图4的框408处调节马达的控制信号的示例性系统的框图。如图5中所展示,患者502连接到流量治疗设备504,比如图1a的流量治疗设备10。该设备可以包括带有马达506的流动发生器,该马达可以用于向患者502提供空气流。
217.在流量治疗设备504的操作期间,多个测量值可以被获取并且被发射到控制信号反馈模块510,以便基于患者502的呼吸循环来调节马达506的控制信号。例如,马达506的参数可以用于测量如上所述的马达速度和/或系统压力。可以使用一个或多个流速传感器508来监测空气流的流速。流速传感器508可以包括两种或更多种不同类型的传感器,比如加热的温度感测元件和超声波换能器组件。此外,一个或多个附加传感器(比如压力传感器)可以用于测量一个或多个附加测量值(例如,压力)。
218.多个测量值(例如,马达速度、流速等)可以用于在呼吸循环检测模块512处确定患者的呼吸循环。确定的呼吸循环可以是交替波形的形式(例如,基本上正弦波形)。关于马达506的测量值和流速传感器508的测量值都可以被馈送到呼吸循环检测模块512中。
219.一旦已经确定患者的呼吸循环,就可以使用该呼吸循环来调节马达506的控制信号。例如,来自呼吸循环检测模块512的经计算的呼吸循环波形可以经受正反馈514。
220.正反馈514可以通过在患者呼气时降低马达速度、和/或在患者吸气时增加马达速度,而在患者的呼吸循环期间与患者一起工作。正反馈可以在吸气期间被实现、但是在呼气期间不被实现,或者正反馈可以在呼气期间被实现、但是在吸气期间不被实现。例如,在呼气时使用“噘唇呼吸”进行呼吸时试图降低他或她的工作的患者可能会受益于在吸气期间增加流速的正反馈、但在呼气期间没有降低流速的正反馈的帮助。通过在呼气期间不实现正反馈,呼气压力和呼气时间可能会增加,这可能对某些患者有益。基于患者吸气/呼气的确定幅度,一个或多个尺度参数可以用于增加或减小控制马达506速度的控制信号的幅度。例如,鼓风机马达控制信号的正反馈可以被表示为:其中,ω对应于马达速度,r对应于患者限制,和对应于其平均值和基准值,以及k
p
对应于正反馈参数。
221.如上所述,流量限制也可以用于确定患者的呼吸循环。一般而言,呼吸系统整体可
以具有一些流动阻力(也称为“限制”或r),这可以用于指示系统的压力p的变化与系统的流量之间的关系。限制r可以随患者吸气和呼气而变化。r值越大表示限制越大(例如,当患者呼气时)。
222.继续参考图5,来自流速传感器508的测量值也可以被馈送到用于测量的流速的最小和/或最大检测模块520中。最小和/或最大测量的流速可以用于确定负反馈项516,然后该负反馈项可以与正反馈514组合518以生成马达506的控制信号。
223.负反馈可以将施加到控制信号的正反馈限制在一定界限,从而抑制随控制信号在患者吸气或呼气时的变化。负反馈可以包括最小和/或最大阈值流速值。最小流速值可以确保设备将流量维持高于阈值,而不管患者呼吸有多困难。这样可以确保高流量治疗的有效性和/或安全性。即使在患者吸气或呼气的幅度增加时,最大流速值也可以限制基于患者呼吸循环的流速调节量。
224.正反馈514可以包括设备的显示器上的呼吸同步设置,该呼吸同步设置可由用户或护理提供者调节。正反馈呼吸同步设置可以允许用户或护理提供者调节机器的设置,以通过手动调节正反馈的量来进一步改善舒适性和/或有效性。这些设置可以包括例如任意数量的可选值,比如2-10、2-5、2、3、4、5或其他。可选值可以通过编号被标记。替代地,可选值可以被标记为不同的类别,比如高设置、中设置和/或低设置。替代地,设置可以允许用户在呼吸同步值上更高(例如,通过按压“ ”按钮等)或更低(例如,通过按压
“‑”
按钮等)。
225.呼吸同步可以逐渐引入,例如,通过增加正反馈的幅度,同时在幅度增加期间保持平均目标流速相同。当首先打开呼吸同步时,和/或当用户增加呼气释放水平(即,增加正反馈水平)时,可以发生逐渐引入。逐渐引入可能引起正反馈在预定持续时间(例如,约30秒、约1分钟、约2分钟、约3分钟、约4分钟或约5分钟)内从零或其先前水平缓慢增加到其新值。这可能引起马达速度振荡,并进而引起流速振荡,以使幅度缓慢增加。在呼吸同步的初始阶段期间,逐渐引入可以减少潜在的患者不适,在呼吸同步的初始阶段中流速变化无法与患者的呼吸完全同步。在逐渐引入期间,流速可能开始跨过流速阈值。此时,负反馈项也可以开始逐渐增加,从而消除或基本上消除正反馈项的进一步增加,以便将流速维持在最大和/或最小阈值内。
226.在图6中展示了正反馈对马达速度的影响的示例。如图6的顶部图形中所示,马达速度602在数个呼吸周期内变化。马达速度可以包括标称马达速度和正反馈,马达速度的最大值和最小值由正反馈项604包络。正反馈604的量是有极限的,该量最初被设置为足够高,使得没有限制发生。相应地,最初感测的最大和最小流速是对患者的呼吸的无限制响应,并且逐渐受到负反馈的限制。如图5中所示,用于确定流速的过程不提前知道马达速度的调节程度,以便保持在极限或阈值内。因此,负反馈逐渐限制正反馈,例如,负反馈可以逐渐增加,直到测量的或感测的最大和/或最小流速不再超过极限或阈值。
227.最小和/或最大阈值流速可以是固定值,也就是说,不管选择的流速或选择的呼吸同步值如何。替代地或附加地,最小和/或最大阈值流速可以由用户设定。这样可以确保装置始终输送最小流速和/或从不超过最大流速,而不管选择的流速或选择的呼吸同步值如何。允许用户设定(多个)阈值也可以允许流量治疗设备以特定患者舒适的流速输送气体。最大和/或最小阈值可以独立于呼吸同步设置来设定。例如,可以允许临床医生设定最大和/或最小阈值,以确保高流量治疗的有效性和/或安全性,同时可以允许患者基于患者认
为最舒适的情况来设定呼吸同步值。
228.替代地或附加地,最小和/或最大流速可以基于用户设定的目标流速来确定。例如,最大和/或最小流速可以是高于和低于选择的流速的某个百分比。替代地或附加地,最大和/或最小流速可以是高于或低于选择的流速的某个值。
229.替代地或附加地,最小和/或最大流速可以基于选择的流速和选择的呼吸同步值这两者。例如,最大和/或最小流速可以是高于和低于选择的流速的某个百分比。然后,这个百分比值可以基于选择的呼吸同步值而变化。替代地,最大和/或最小流速可以是高于和低于选择的流速的某个值。然后,这个值可以基于选择的呼吸同步值而变化。
230.图6的底部图形示出了由设备的(多个)流速传感器感测的流速606以及由用户设定的最小流速608和最大流速610。流速606是根据图6的顶部图形和患者的正反馈由马达速度变化引起的。为了将流速保持在这些极限608、610内,设备的控制器测量每次呼吸内的最小和最大流速,然后反复地调节反馈回路以在界限内驱动流,比如通过遵循图5中所示的过程。示例性用户界面或其部分
231.如图7a和图7b中所示,可以是图1a的用户界面14的用户界面700可以显示允许比如患者或临床医生等用户调节呼气释放(“er”)水平702的设置。呼气释放水平对应于上述正反馈项或呼吸同步设置。如图7a和图7b中所示,用户可以选择四个不同的呼气释放水平,其可以包括如图7a中所有三个er圈704为空所展示的无呼气释放(即无正反馈)、第一或最低呼气释放水平、如图7b中三个er圈704中的两个为实所展示的第二呼气释放水平、以及第三或最高呼气释放水平(也就是说,最高或最大正反馈项)。用户可以例如经由按钮703或用于增加或减少水平的其他形式的用户输入来调节呼气释放水平。
232.如图7a和图7b中所示的er水平702展示了示例性呼气释放设置。如上所述,用户界面可以显示其他形式的呼气释放设置,比如数值、滑动标度或其他。呼气释放设置可以包括不同数量的水平,这些水平可以是离散水平或是连续的。如图7c中所示,当呼气释放设置菜单折叠时,用户界面700还可以在屏幕上显示先前选择的呼气释放水平708(例如,低于目标流速值)。先前选择的呼气释放水平708也可以任选地仅在用户已经将呼气释放量设定为大于0的值时显示。
233.如图7a至图7c中所示,用户界面700还可以任选地允许例如经由按钮706或用于增加或减小设定流速705的其他形式的用户输入对设定流速705进行调节。用户界面700还可以显示最大流速阈值710和最小流速阈值712,允许用户在最大流速阈值与最小流速阈值之间调节设定流速705。在配置中,最大和最小流速阈值可以由用户(比如临床医生)在单独的菜单上设定。单独的菜单可以被设计为由临床医生、技术人员和/或工程师使用。单独的菜单可以被设计为患者或其他普通用户无法访问。流量治疗系统
234.附加地参考图8,示出了类似于图1a的系统的系统10。除了环境入口端口27外,图8的系统附加地包括用于连接到氧气源(比如医院氧气供应或氧气罐等)的氧气入口端口28。图8的系统还包括位于或靠近吸气管的端部的温度传感器29。根据本披露,图8的系统10也适用于实现对可呼吸气体的流量的控制。
235.操作传感器3a、3b、3c(比如流量传感器、温度传感器、湿度传感器和/或压力传感
器)可以放置在流量治疗系统10中的不同位置。附加传感器(例如,传感器20、25)可放置在患者导管16和/或插管17上的各个位置中(例如,可在吸气管的端部处或附近存在温度传感器29)。来自传感器的输出可以被控制器13接收,以帮助控制器以提供合适治疗的方式操作流量治疗系统10。在一些配置中,提供合适治疗包括满足患者的峰值吸气需求。系统10可以具有发射器和/或接收器15,以使控制器13能够从传感器接收信号8和/或控制流量治疗系统10的不同部件,包括但不限于流动发生器11、加湿器12和加热丝16a、或者与流量治疗系统10相关联的附件或外围设备。附加地或替代地,发射器和/或接收器15可以向远程服务器输送数据或者实现对系统10的远程控制。
236.在氧气和环境空气已完成混合之后,可通过放置一个或多个气体组合物传感器(比如,超声波换能器系统,也称为超声波传感器系统)来测量氧气。该测量可以在装置、输送导管、患者接口内或在任何其他合适的位置处进行。
237.还可以通过在环境空气入口导管、氧气入口导管和最终输送导管中的至少两个上使用流速传感器来测量氧气浓度,以确定至少两种气体的流速。通过确定两种入口气体或一种入口气体的流速以及一种总流速连同入口气体的假设的或测得的氧气浓度(环境空气为约20.9%,氧气为约100%),可以计算出最终气体组合物的氧气浓度。替代地,可以在环境空气入口导管、氧气入口导管和最终输送导管这三者处全部放置流速传感器,以允许冗余并通过检查读数的一致性来测试出每个传感器正确地工作。还可以使用测量由流量治疗设备10输送的氧气浓度的其他方法。
238.流量治疗系统10可以包括患者传感器26,比如脉搏血氧仪或患者监测系统,以测量患者的一个或多个生理参数,比如患者的血氧饱和度(spo2)、心率、呼吸率、灌注指数,并且提供信号质量的量度。传感器26可以通过有线连接或通过经传感器26上的无线发射器进行的通信来与控制器13通信。传感器26可以是被设计成连接至患者手指的一次性粘合性传感器。传感器26可以是非一次性传感器。针对不同年龄组设计并且将连接至患者身上的不同位置的传感器是可用的,这些传感器可以与流量治疗系统10一起使用。脉搏血氧仪将附接到用户(通常在其手指处),不过其他位置(比如,耳垂)也是一个选项。脉搏血氧仪将连接至装置中的处理器,并且将不断地提供指示患者的血氧饱和度的信号。患者传感器26可以是可热插拔装置,其可以在流量治疗系统10的操作期间被附接或互换。例如,患者传感器26可以使用usb接口或使用无线通信协议(比如,近场通信、wifi或)连接到流量治疗系统10。当患者传感器26在操作期间断开时,流量治疗系统10可以在其先前的操作状态下持续操作限定的时间段。在限定的时间段之后,流量治疗系统10可以触发警报,从自动模式转变到手动模式,和/或完全退出控制模式(例如,自动模式或手动模式)。患者传感器26可以是通过物理或无线接口与流量治疗系统10通信的床边监测系统或其他患者监测系统。控制系统
239.再次参考图8,控制器13可以被编程有或被配置为执行闭环控制系统,以用于控制流量治疗系统10的操作。闭环控制系统可以被配置为确保患者的spo2达到目标水平并一贯地保持处于或接近该水平。
240.控制器13可以从用户接收可以由控制器13用于执行闭环控制系统的(多个)输入。目标spo2值可以是单个值,也可以是值范围。(多个)值可以是预设的、由临床医生选择的、或基于患者类型确定的,其中患者类型可指代当前的病痛和/或关于患者的信息(比如,年
龄、体重、身高、性别和其他患者特性)。类似地,目标spo2可以是两个值,每个值是以上文所描述的任何方式选择的。这两个值将代表针对患者的spo2的可接受值的范围。控制器可以将所述范围内的一个值作为目标。目标值可以是范围的中间值,也可以是范围内的任何其他值,其可以是预设的或由用户选择的。替代地,可基于spo2的目标值来自动设定范围。控制器可以被配置为当患者的spo2值移到范围之外时具有一个或多个设定的响应。响应可以包括发出警报、改变为对fdo2的手动控制、将fdo2改变为特定值和/或其他响应。控制器可以具有一个或多个范围,其中当控制器移到每个范围之外时,发生一个或多个不同的响应。
241.流量治疗系统10的图形用户界面可以被配置为提示用户输入患者类型,并且spo2极限可以基于用户的选择来确定。附加地,用户界面可以包括自定义选项,其中用户可以限定这些界限。
242.总体上,spo2将被控制在约80%与约100%之间、或约80%与约90%之间、或约88%与约92%之间、或约90%与约99%之间、或约92%与约96%之间。spo2可被控制在来自上述范围中的任何两个范围的任何两个合适值之间。目标spo2可在约80%与约100%之间、或在约80%与约90%之间、或在约88%与约92%之间、或在约90%与约99%之间、或在约92%与约96%之间、或约94%、或94%、或约90%、或90%、或约85%、或85%。spo2目标可以是来自上述范围中的任何两个范围的任何两个合适值之间的任何值。对于限定的范围,spo2目标可以对应于spo2的中间。
243.可以将fdo2构造成被控制在一定范围内。如先前所讨论的,只要流速满足或超过患者的峰值吸气需求,系统中测量的氧气浓度(fdo2)将基本上与患者呼吸的氧气浓度(fio2)相同,因此这些术语可以被视为等同的。每一个范围极限可以是预设的、由用户选择的、或基于患者类型确定的,其中患者类型可指代当前的病痛和/或关于患者的信息(比如,年龄、体重、身高、性别和/或其他患者特性)。替代地,可选择fdo2的单个值,并且可至少部分地基于该值来确定范围。例如,范围可高于和低于所选择的fdo2一设定量。所选择的fdo2可用作控制器的起点。如果控制器试图将fdo2移到范围之外,则系统可具有一个或多个响应。这些响应可以包括发出警报、防止fdo2移到范围之外、切换到对fdo2的手动控制、和/或切换到特定的fdo2。装置可具有一个或多个范围,其中当装置达到每个范围的界限时,发生一个或多个不同的响应。
244.fdo2可以被控制在约21%与约100%之间、或约21%与约90%之间、或约21%与约80%之间、或约21%与约70%之间、或约21%与约60%之间、或约21%与约50%之间、或约25%与约45%之间。fdo2可被控制在来自所描述的任何两个范围的任何两个合适值之间。fdo2目标可在来自所描述的任何两个范围的任何两个合适值之间。如果范围是基于单个值,则可通过相对于所选择的值加上/减去一固定量来确定上限和下限。加上或减去的量可以是约1%、或约5%、或10%、或约15%、或约20%、或约30%、或约50%、或约100%。加上/减去的量可相对于所选择的值而改变。例如,上限可比所选择的值高20%,因此对于控制的范围,50%fdo2的所选择的值将具有60%的上限。用于该范围的百分比可以是约1%、或约5%、或10%、或约15%、或约20%、或约30%、或约50%、或约100%。用于计算下限和上限的方法将不一定需要相同。如果使用单个值,则该值可在约21%与约100%之间、或约25%与约90%之间、或约25%与约80%之间、或约25%与约70%之间、或约25%与约60%之间、或约25%与约50%之间、或约25%与约45%之间。
闭环控制
245.参考图9,展示了闭环控制系统1000的示意图。闭环控制系统可利用两个控制回路。第一控制回路可由spo2控制器来实现。spo2控制器可以部分地基于目标spo2和/或测得的spo2来确定目标fdo2。如上文所讨论,目标spo2值可以是单个值,也可以是可接受值的范围。(多个)值可以是预设的、由临床医生选择的、或基于客户特性自动确定的。总体上,在治疗期之前或开始时接收或确定目标spo2值,不过可以在治疗期期间的任何时间接收目标spo2值。在治疗期期间,spo2控制器还可以接收以下作为输入:来自气体组合物传感器的测得的(多个)fdo2读数以及来自患者传感器的测得的(多个)spo2读数和(多个)信号质量读数。在一些配置中,spo2控制器可以接收目标fdo2作为输入,在此类情况下,可将spo2控制器的输出直接提供回到spo2控制器以作为输入。至少部分地基于这些输入,spo2控制器可以将目标fdo2输出到第二控制回路。
246.第二控制回路可以由fdo2控制器来实施。fdo2控制器可以接收测得的fdo2和目标fdo2的输入。然后,fdo2控制器可以输出氧气入口阀控制信号,以基于这些测得的fdo2与目标fdo2值之间的差异来控制氧气阀的操作。当流量治疗系统10在自动模式下操作时,fdo2控制器可以接收从第一控制回路输出的目标fdo2值。fdo2控制器还可以接收附加参数,比如流速值、气体性质和/或测得的fdo2。气体性质可以包括o2入口处气体的温度和/或供应源的氧气含量。连接到氧气入口阀的气体供应源可以是富氧气体流,其中供应源的氧气含量可小于纯氧气(即,100%)。例如,氧气供应源可以是氧气含量小于100%且大于21%的富氧气体流。
247.fdo2控制器可以从这些输入中的至少一些确定实现目标fdo2将所需的氧气流速。fdo2控制器可以使用流速输入以便更改阀控制信号。如果流速改变,则fdo2控制器可以自动计算将目标fdo2维持在新流速所需的新的所需氧气流速,而不必等待来自气体浓度传感器的反馈(比如测得的fdo2值)。然后,fdo2控制器可以输出更改后的阀控制信号以基于新流速来控制阀。在一些配置中,fdo2控制器的控制信号可以设定氧气阀的电流,以便控制氧气阀的操作。附加地或替代地,fdo2控制器可以检测测量的fdo2的变化并相应地更改阀的位置。在手动模式期间,第二控制回路可以独立操作,而无需从第一控制回路接收目标fdo2。相反,可以从用户输入或默认值接收目标fdo2。
248.在治疗期期间,spo2控制器和fdo2控制器可以继续自动控制流量治疗系统的操作,直到治疗期结束或事件触发从自动模式到手动模式的改变。术语
249.虽然已经在某些实施例和示例的背景下描述了本披露,但本领域的技术人员应当理解的是,本披露在具体披露的实施例之外延伸到其他替代实施例和/或用途以及其明显的变更和等同物。此外,虽然已经详细地展示并描述了本披露的这些实施例的几种变化,但处于本披露内容的范围内的其他变更对本领域的普通技术人员而言将是清楚的。还考虑到可以对这些实施例的特定特征和方面作出不同的组合或子组合,并且这些组合或子组合仍属于本披露的范围内。例如,以上结合一个实施例描述的特征可以用于本文描述的不同实施例,并且该组合仍然落入本披露的范围内。应当理解,所披露的实施例的多个不同的特征和方面可以彼此组合或替代,以便形成本披露的实施例的变化模式。因此,其旨在使本披露的在此披露的范围不应受到上述特定实施例的限制。因此,除非另有说明或除非明显不兼
容,否则本发明的每个实施例除了本文描述的其必要特征之外还可以包括来自本文披露的本发明的每个其他实施例的在本文中描述的一个或多个特征。
250.结合特定的方面、实施例或示例描述的特征、材料、特性或组应被理解为适用于在本部分或本说明书中其他地方描述的任何其他的方面、实施例或示例,除非与其不相容。在本说明书(包括任何所附权利要求、摘要和附图)中披露的所有特征、和/或所披露的任何方法或过程的所有步骤可以通过任何组合来结合,除非这样的特征和/或步骤中的至少一些的组合是互斥的。本发明不局限于任何前述实施例的细节。本保护范围扩展到在本说明书(包括任何所附权利要求、摘要和附图)中披露的特征中的任何一个新颖的特征或其任何新颖的组合,或扩展到如此披露的任何方法或过程的步骤中的任何一个新颖的步骤或其任何新颖的组合。
251.此外,在本披露中在单独的实现方式的背景下描述的某些特征也可以在单个实现方式中组合地实施。与此相反,在单一实现方式的背景下描述的不同特征也可以在多个实现方式中分开地或以任何适合的子组合来实施。此外,尽管某些特征在上文可能被描述为以某些组合起作用,但是在一些情况下,可以从所要求保护的组合中去除该组合的一个或多个特征,并且该组合可以作为子组合或子组合的变体被要求保护。
252.此外,虽然某些操作可以以特定顺序在附图中描绘或在本说明书描述,但此类操作不需要按所示的特定顺序或按先后顺序来进行,或者不需要所有所示操作都被进行才能实现所希望的结果。未描绘或描述的其他操作可以被纳入这些示例性方法和过程中。例如,可以在任何所描述的操作之前、之后、同时或之间进行一个或多个附加操作。此外,可以在其他实现方式中将这些操作重新排列或重新排序。本领域技术人员将了解的是,在一些实施例中,所展示和/或披露的过程中采取的实际步骤可以不同于附图中所示的步骤。取决于实施例,可以去除上述某些步骤,可以添加其他步骤。此外,以上披露的特定实施例的特征和属性可以以不同的方式组合以形成另外的实施例,所有这些实施例都落入本披露内容的范围内。并且,上文描述的实现方式中的各种系统部件的分离不应被理解为在所有的实现方式中都要求这样的分离,而应理解的是,所描述的部件和系统通常可以被一起集成到单一产品中或包装到多个产品中。
253.出于此披露的目的,在此描述了某些方面、优点、和新颖特征。不一定根据任何具体实施例都可以实现所有这样的优点。因此,例如,本领域技术人员应认识到,本披露可以按实现如在此所传授的一个优点或一组优点的方式来实施或实行,而不一定实现如在此可能传授或建议的其他优点。
254.本文所使用的条件性语言,例如,尤其是“能够”、“可能”、“也许”、“可以”、“例如”等,除非另外明确陈述或者以其他方式在所使用的语境内理解,否则通常旨在传达某些实施例包括而其他实施例不包括某些特征、元件和/或步骤。因此,这样的条件性语言一般不旨在暗示:特征、元件、和/或步骤是一个或多个实施例无论如何都需要的,或者一个或多个实施例一定包括用于在有或没有其他输入或提示的情况下决定这些特征、元件和/或步骤是否被包含在任何具体实施例中或是将在任何具体实施例中实施的逻辑。术语“包括”、“包含”、“具有”等是同义的,并以开放的方式包含性地使用,而且不排除额外元件、特征、动作、操作等等。同样地,术语“或”以其包含的意义(而不是以其排他性含义)被使用,使得例如在用于连接元素的列表时,术语“或”是指列表中的一个、一些或所有元素。
255.除非另外特别说明,否则比如短语“x、y和z中的至少一个”等连接性语言,在上下文中使用时一般应以其他方式理解为传达如下意思:项目、名目等可以是x、y或z。因此,这样的连接性语言一般并非意在暗示某些实施例需要存在x中的至少一个、y中的至少一个、以及z中的至少一个。
256.本文使用的程度语言,例如本文使用的词语“大致”、“约”、“总体上”和“基本上”,表示接近于所叙述的值、量或特性、但仍然起到期望作用或实现期望结果的值、量或特性。例如,术语“大致”、“约”、“总体上”和“基本上”可以指在小于所述量的10%、小于所述量的5%、小于所述量的1%、小于所述量的0.1%、小于所述量的0.01%之内的量。作为另一示例,在某些实施例中,术语“大致平行”和“基本上平行”指的是偏离完全平行小于或等于15度、10度、5度、3度、1度、0.1度或其他的值、量或特征。
257.本文中披露的任何方法都不需要以所述顺序执行。本文中披露的方法包括由从业者采取的某些动作;但是,这些方法也可以包括这些动作的任何第三方指令,无论是明示的还是暗示的。例如,比如“控制马达速度”的动作包括“指令控制马达速度”。
258.本文中描述的所有的方法和任务可以由计算机系统执行并且完全自动化。在一些情况下,计算机系统可以包括通过网络进行通信和互操作以执行所描述的功能的多个不同的计算机或计算装置(例如,物理服务器、工作站、存储阵列、云计算资源等)。每个这样的计算装置通常包括执行存储在存储器或其他非暂时性计算机可读存储介质或装置(例如,固态存储装置、磁盘驱动器等)中的程序指令或模块的处理器(或多个处理器)。本文中披露的不同功能可以在这样的程序指令中实施,和/或可以在计算机系统的专用电路(例如,asic或fpga)中实现。在计算机系统包括多个计算装置时,这些装置可以是但不必是同位的。所披露的方法和任务的结果可以通过将比如固态存储芯片和/或磁盘等物理存储装置转换成不同状态而持久地存储。在一些实施例中,计算机系统可以是基于云的计算系统,该系统的处理资源由多个不同的商业实体或其他用户共享。
259.本披露的范围不旨在受限于本部分或本说明书中其他地方的优选实施的具体披露内容,并且可以由本部分或本说明书中其他地方或未来提出的权利要求限定。权利要求的语言将基于权利要求中采用的语言广义地解释,并且不限于本说明书中或者在申请的诉讼期间描述的示例,这些示例应被解释为非排他性的。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
