1.本发明涉及一种水陆两栖车辆,特别涉及一种水陆两栖摩托艇。
背景技术:
2.水陆两栖摩托艇是既能够在陆地行驶,又能够泛水浮渡的的特种车辆。当陆地行驶时,水陆两栖摩托艇的驱动装置提供动力,并将动力通过传动装置传递给车轮,车轮转动以实现运动。当水中行驶时,水陆两栖摩托艇的驱动装置将动力通过传动装置传递给螺旋桨,使螺旋桨转动,以实现水中运动。
3.为了实现在水中行驶,螺旋桨设于后舱的底部或尾部船舷高度偏低的位置。然而,在上岸时或在陆地行驶时,由于螺旋桨配置的高度过低,容易与地面磕碰,使用寿命短。而且,在上岸时,舱体的前端容易与地面发生磕碰而损坏,使用寿命短。
技术实现要素:
4.本发明要解决的技术问题是在上岸时或在陆地行驶时,螺旋桨配置的高度过低,容易与地面磕碰,使用寿命短。而且,在上岸时,舱体的前端容易与地面发生磕碰而损坏,使用寿命短,为此提供一种水陆两栖摩托艇。
5.本发明解决其技术问题所采用的技术方案是:
6.本发明提供一种水陆两栖摩托艇,包括:前舱、后舱和动力系统,所述前舱的长度方向沿第一轴线x延伸;所述后舱与所述前舱连接,所述后舱的长度方向沿第二轴线延伸;其中,所述第一轴线与所述第二轴线相交;所述动力系统包括:驱动装置、传动装置、前轮、后轮及螺旋桨,所述驱动装置与所述传动装置连接,所述传动装置与所述前轮和/或所述后轮连接,并与所述螺旋桨连接。
7.进一步,所述第一轴线与所述第二轴线之间夹角为α,10
°
≤α≤30
°
。
8.进一步,所述传动装置相对于所述驱动装置的一端设有变速分动箱,所述变速分动箱与所述前轮连接,并与所述螺旋桨连接。
9.进一步,所述前轮为两个,两个所述前轮分别与所述前舱的两侧之间设有两个前轮控制组件,所述后轮与所述后舱的尾部船舷之间设有后轮控制组件。
10.进一步,所述前轮控制组件包括:上摇臂、下摇臂、减震器和伸缩器,所述上摇臂的一端与所述前轮的轮毂连接,另一端与所述减震器连接,所述减震器与所述伸缩器滑动连接。
11.进一步,所述后轮控制组件包括:伸缩器、减震器、连接部ⅰ和连接部ⅱ,所述伸缩器的一端与所述尾部船舷连接,另一端与所述连接部ⅰ连接;所述连接部ⅰ与所述连接部ⅱ连接,所述连接部ⅱ与所述后轮的轮毂连接;所述减震器与所述连接部ⅱ连接,并与所述后轮连接,所述连接部ⅰ、所述连接部ⅱ和所述减震器共同构成两个三角形。
12.进一步,所述驱动装置靠近所述后舱的尾部设置。
13.进一步,所述前舱包括至少两个子前舱,所述相邻的两个子前舱之间可拆卸连接;
所述后舱包括至少两个子后舱,相邻的两个所述子后舱之间可拆卸连接。
14.进一步,所述传动装置包括传动杆,所述传动杆的第一端与所述螺旋桨连接,第二端位于所述后舱内,并与所述驱动装置连接;所述传动杆外设有套筒,所述传动杆配置为第二端的高度高于第一端。
15.进一步,所述后舱的尾部船舷的高度大于所述后舱的头部船舷,所述后舱的尾部船舷部分向头部船舷方向凹入形成凹槽。
16.本发明之水陆两栖摩托艇具有如下优点:
17.①
由于前舱相对于后舱非平行设置,在上岸时或在陆地行驶时,使得后舱的后端向竖直向上方向翘起,以增加螺旋桨的高度,使螺旋桨难以与地面发生磕碰,使用寿命长。而且,在上岸时,前舱向竖直向上方向翘起,前舱10难以与坡道发生磕碰而损坏,使用寿命长;
18.②
通过设置第一轴线与第二轴线之间夹角为α,10
°
≤α≤30
°
,一方面能够保证螺旋桨的离地高度和前舱与坡道的角度,另一方面能够使得在地面行驶时,便于后舱内容纳货物或满足人的舒适性;
19.③
通过设置变速分动箱,变速分动箱能够选择性地将动力传递给螺旋桨或前轮,即在陆地行驶时,仅提供动力给前轮,在水面行驶时,仅提供动力给螺旋桨,以降低使用成本。
附图说明
20.图1为本发明实施例的水陆两栖摩托艇在陆地行驶时的场景示意图;
21.图2为本发明实施例的水陆两栖摩托艇在入水时的场景示意图;
22.图3为本发明实施例的水陆两栖摩托艇在水中行驶时的场景示意图;
23.图4为本发明实施例的水陆两栖摩托艇刚上岸时行驶时的场景示意图;
24.图5为本发明实施例的水陆两栖摩托艇完全上岸时的场景示意图;
25.图6为图1至图5所示的水陆两栖摩托艇的动力系统的原理示意框图;
26.图7为图1至图5所示的水陆两栖摩托艇的前轮活动组件的结构示意图;
27.图8为图1至图5所示的水陆两栖摩托艇的后轮活动组件的结构示意图;
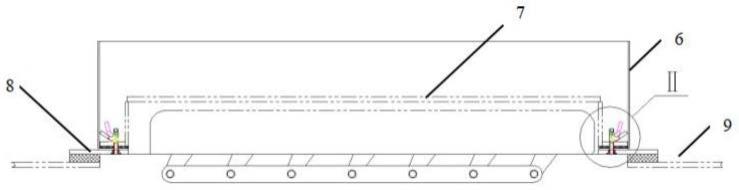
28.图9为本发明一实施例的水陆两栖摩托艇的剖视图;
29.图10为本发明一实施例的水陆两栖摩托艇上岸时的结构示意图;
30.图11为本发明一实施例的水陆两栖摩托艇的俯视图;
31.图12为本发明一实施例的水陆两栖摩托艇的俯视图;
32.图13为本发明一实施例的水陆两栖摩托艇的结构示意图;
33.图14为图13所示的水陆两栖摩托艇上岸时的场景示意图;
34.图15为本发明一实施例的水陆两栖摩托艇省略螺旋桨的仰视图。
35.图中:10-前舱,11-子前舱,20-后舱,21-子后舱,22-头部船舷,23-尾部船舷,24-凹槽,31-驱动装置,32-前轮,33-后轮,34-螺旋桨,35-传动装置,351-传动杆,36-变速分动箱,37-套筒,40-前轮控制组件,41-上摇臂,42-下摇臂,43-减震器,44-滑轨,45-滑块,46-伸缩器,50-后轮控制组件,51-伸缩器,52-减震器,53-连接部ⅰ,54-连接部ⅱ。
具体实施方式
36.以下结合附图及实施例对本发明作进一步说明。
37.参照附图1至图5,本发明的一实施例中提供一种水陆两栖摩托艇,包括:前舱10、后舱20和动力系统,前舱10的长度方向沿第一轴线x延伸;后舱20与前舱10连接,后舱20的长度方向沿第二轴线y延伸;其中,第一轴线x与第二轴线y相交;动力系统包括:驱动装置31、传动装置35、前轮32、后轮33及螺旋桨34,驱动装置31与传动装置35连接,传动装置35与前轮32和/或后轮33连接,并与螺旋桨34连接。
38.如图1所示,水陆两栖摩托艇在陆地行驶时,后舱20相对于前舱10向竖直向上方向翘起,使得螺旋桨34的与地面的距离更大,不易发生磕碰,螺旋桨34的使用寿命长。
39.如图2所示,水陆两栖摩托艇在入水时,前舱10有足够大的排水体积,能够提供足够的浮力,以加强水陆两栖摩托入水时的稳定性。
40.如图4所示,水陆两栖摩托艇在上岸时,前轮32与坡道接触,后轮33位于水中,并未与坡道接触,前舱10相对于后舱20向竖直向上方向翘起,,以免前舱10的前端与坡道磕碰,增长前舱10的使用寿命。
41.优选地,前轮32与传动装置35连接,前轮32与坡道接触,以便前轮32在驱动力作用下,使水陆两栖摩托艇脱离水面。
42.本实施例中,由于前舱10相对于后舱20非平行设置,在上岸时或在陆地行驶时,使得后舱20的后端向竖直向上方向翘起,以增加螺旋桨34的高度,使螺旋桨34难以与地面发生磕碰,使用寿命长。而且,在上岸时,前舱10向竖直向上方向翘起,前舱10难以与坡道发生磕碰而损坏,使用寿命长。
43.参照附图1,第一轴线x与第二轴线y之间夹角为α,10
°
≤α≤30
°
。其中,优选α为19
°
。
44.本实施例中,通过设置第一轴线x与第二轴线y之间夹角为α,10
°
≤α≤30
°
,一方面能够保证螺旋桨34的离地高度和前舱10与坡道之间的角度,另一方面能够使得在地面行驶时,便于后舱20内容纳货物或满足人的舒适性。
45.参照附图6,传动装置35相对于驱动装置31的一端设有变速分动箱36,变速分动箱36与前轮32连接,并与螺旋桨34连接。
46.其中,参照附图1、图2、图4和图5,当水陆两栖摩托艇在陆地行驶时,入水时,上岸时及完全上岸时,变速分动箱36为前轮传递动力,使水陆两栖摩托艇沿箭头所指方向前进。参照附图3,当水陆两栖摩托艇在水中行驶时,变速分动箱36为螺旋桨传递动力,使水陆两栖摩托艇沿箭头所指方向前进。
47.本实施例中,通过设置变速分动箱36,变速分动箱36能够选择性地将动力传递给螺旋桨34或前轮32,即在陆地行驶时,仅提供动力给前轮32,在水面行驶时,仅提供动力给螺旋桨34,以降低使用成本。
48.如图1所示,前轮32为两个,两个前轮32分别与前舱10的两侧之间设有两个前轮控制组件40,后轮33与后舱20的尾部船舷23之间设有后轮控制组件50。
49.其中,参照图3所示,当水陆两栖摩托艇在水中行驶时,前轮控制组件40能够抬起前轮32,后轮控制组件50能够抬起后轮33。参照图1、图2、图4和图5所示,前轮控制组件40能够放下前轮32,后轮控制组件50能够放下后轮33,使前轮32和后轮33与地面或坡道接触。
50.本实施例中,通过设置前轮控制组件40和后轮控制组件50,以便在水中行驶时,能够控制前轮32和后轮33至少部分脱离水面,以降低水中行驶的阻力。
51.如图7所示,前轮控制组件40包括:上摇臂41、下摇臂42、减震器43和伸缩器44,上摇臂41的一端与前轮32的轮毂连接,另一端与减震器43连接,减震器42与伸缩器43滑动连接。其中,减震器42与伸缩器43通过滑块45与滑轨44构成滑动机构,从而实现滑动连接。
52.本实施例中,通过设置上摇臂41、下摇臂42、减震器43和伸缩器44,通过控制伸缩器44的压缩和扩张,带动减震器43运动,再由减震器43带动上摇臂41运动,最终带动前轮32运动,从而实现前轮32的高度调节。
53.如图8所示,后轮控制组件50包括:伸缩器51、减震器52、连接部ⅰ53和连接部ⅱ54,伸缩器51的一端与尾部船舷23连接,另一端与连接部ⅰ53连接;连接部ⅰ53与连接部ⅱ54连接,连接部ⅱ54与后轮33的轮毂连接;减震器52与连接部ⅱ54连接,并与后轮20连接,连接部ⅰ53、连接部ⅱ54和减震器52共同构成两个三角形。
54.本实施例中,连接部ⅰ53、连接部ⅱ54和减震器52共同构成两个三角形,三角形的稳定性好,后轮控制组件50经久耐用。
55.参照图11和图12所示,本实施例提供一种水陆两栖摩托艇,其技术方案大致与上述实施例相同,其区别在于:前舱10包括至少两个子前舱11,相邻的两个子前舱11之间可拆卸连接;后舱20包括至少两个子后舱21,相邻的两个子后舱21之间可拆卸连接。
56.参照图11所示,前舱10包括两个子前舱11,后舱20为两个子后舱21,且两个子前舱11沿左右方向排列。参照图12所示,前舱10包括两个子前舱11,后舱20为三个子后舱21,且三个子后舱21上下方向排列,以便根据实际需求去设置子后舱21的个数,以调整后舱的容量。
57.本实施例中,通过设置至少两个子前舱11和两个子后舱21,相邻的两个子前舱11之间可拆卸连接,相邻的两个子后舱21之间可拆卸连接,这样能够仅仅在前舱10或后舱20部分损坏时,仅仅更换其中损坏部分的子前舱11或子后舱21,能够降低维修成本。
58.参照图9所示,传动装置35包括传动杆351,传动杆351的第一端与螺旋桨34连接,第二端位于后舱20内,并与驱动装置31连接;传动杆351外设有套筒343,传动杆342配置为第二端的高度高于第一端。
59.本实施例中,通过设置传动杆351,传动杆342配置为第二端的高度高于第一端,这样能够防止水通过套筒343与传动杆351的间隙进入后舱20内。
60.参照图10所示,本发明还提供一实施例,该实施例提供一种水陆两栖摩托艇,技术方案大致与上述实施例相同,其区别在于:驱动装置31靠近后舱20的尾部设置。
61.本实施例中,驱动装置31靠近后舱20的尾部设置,这样驱动装置31作为配重,能够使水陆两栖摩托艇的重心后移,使水陆两栖摩托艇在出水时,更容易地使前舱10翘起,使前舱10难以与坡道发生磕碰而损坏。
62.参照图13和图14所示,本发明还提供一实施例,该实施例的技术方案大致与上述实施例相同,其区别在于:后舱20的尾部船舷23的高度大于后舱20的头部船舷22。其中,尾部船舷23的高度h,头部船舷22的高度为h,1.2≤h/h≤2。优选h/h=1.5。
63.参照图15所示,本发明还提供一实施例,该实施例提供一种水陆两栖摩托艇,技术方案大致与上述实施例相同,其区别在于:后舱20的尾部船舷23部分向头部船舷22方向凹
入形成凹槽24。通过设置凹槽24,凹槽24用于提供容纳后轮24的空间,使结构更加紧凑,实用性强。
64.本实施例的水陆两栖摩托艇的工作原理如下:
65.参照图1所示,当水陆两栖摩托艇在陆地行驶时,后舱20的后端向竖直向上方向翘起。和图6所示,驱动装置31通过传动装置35带动前轮32转动,以实现水陆两栖摩托艇在陆地上行驶。
66.参照图2所示,当水陆两栖摩托艇行驶至入水,前舱10接触水面时,前轮控制组件40和后轮控制组件50分别将前轮32和后轮33收起,水陆两栖摩托艇藉由自身重力下滑进入水中。
67.参照图3所示,当水陆两栖摩托艇在水中行驶时,参照图6所示,驱动装置31通过传动装置35驱动螺旋桨34转动,实现水陆两栖摩托艇在水中行驶。
68.参照图4和图6所示,当水陆两栖摩托艇刚上岸时,控制前轮控制组件40和后轮控制组件50分别将前轮32和后轮33放下,前轮32与坡道接触,后轮33在水中,未与坡道接触。驱动装置31通过传动装置35带动前轮32顺时针转动,前轮32与坡道接触,沿着箭头所示方向前进。
69.参照图5所示,当水陆两栖摩托艇完全上岸时,后轮33与坡道接触,后轮33能够作为从动轮,在前轮32的带动下转动,沿着箭头所示方向前进。
70.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
71.以上所述实施例仅表达了本技术的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对申请专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本技术构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。因此,本技术专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。