1.本实用新型涉及内窥镜生产设备技术领域,具体为一种光纤工业内窥镜组装设备。
背景技术:
2.内窥镜是集中了传统光学、人体工程学、精密机械、现代电子、数学、软件等于一体的检测仪器,一个具有图像传感器、光学镜头、光源照明、机械装置等,被广泛的应用于工业和医疗领域,随着技术的发展现已有光纤工业内窥镜。
3.在进行光纤工业内窥镜的组装过程中,通常需要人工进行镜头部分的组装,效率和良品率都比较低。
技术实现要素:
4.本实用新型的目的在于提供一种光纤工业内窥镜组装设备,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种光纤工业内窥镜组装设备,包括组装机构,所述组装机构正面一侧安装有导出机构,所述组装机构包括安装架,安装架侧面为c形结构,安装架侧面安装有竖式运输带,竖式运输带侧面顶部等距安装有卡扣,安装架顶部两侧分别安装有原料运输带,安装架顶部位于原料运输带背面的位置分别安装有机械臂,机械臂的活动端安装有升降气缸,升降气缸底部固定连接有端架,端架底部两侧分别固定连接有侧板,侧板的相反侧分别安装有推杆,所述推杆输出端分别固定连接有相适配的夹持爪。
6.优选的,所述导出机构包括导出运输带,导出运输带侧面固定连接有边架,边架的另一侧安装有倾斜放置的导出电机,导出电机输出端固定连接有导出丝杠,导出丝杠外壁螺纹连接有丝套,所述边架侧面贯穿开设有供丝套滑动的斜滑口,丝套侧面贯穿斜滑口后固定连接有导出气缸,导出气缸输出端固定连接有机械爪。
7.优选的,所述边架侧面位于机械爪下方的位置固定连接有挡杆,挡杆高度大于导出运输带高度。
8.优选的,所述组装机构背面安装有控制器,所述竖式运输带、原料运输带、机械臂、升降气缸、推杆和导出机构分别与控制器电性连接。
9.优选的,所述夹持爪和卡扣均为半圆形结构。
10.与现有技术相比,本实用新型的有益效果是:
11.该光纤工业内窥镜组装设备,通过设置的组装机构能够利用竖式运输带上的卡扣对工业内窥镜的延伸部位进行固定,并利用成对设置的机械臂和原料运输带能够对其安装在延伸部位的零件进行组装,提高了生产效率。
12.同时,通过设置的导出机构,能够对组装完毕后的内窥镜进行引导运输,从而使得其脱离组装机构,进行下一步的加工。
附图说明
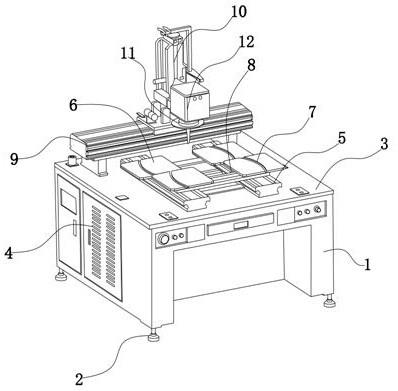
13.图1为本实用新型的背面结构示意图;
14.图2为本实用新型的正面结构示意图;
15.图3为本实用新型的组装机构结构示意图;
16.图4为本实用新型的图3中a处放大结构示意图;
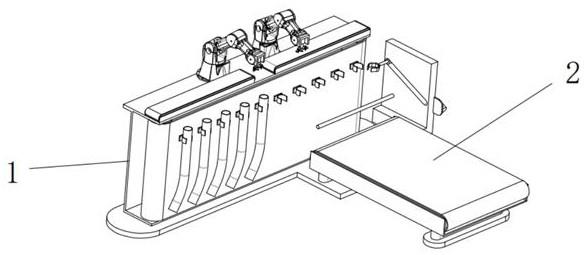
17.图5为本实用新型的导出机构结构示意图。
18.图中:1、组装机构;101、安装架;102、竖式运输带;103、原料运输带;104、机械臂;105、卡扣;106、升降气缸;107、端架;108、侧板;109、推杆;110、夹持爪;2、导出机构;201、导出运输带;202、边架;203、导出电机;204、导出丝杠;205、丝套;206、导出气缸;207、机械爪;208、挡杆;3、控制器。
具体实施方式
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
20.需要说明的是,在本实用新型的描述中,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,并不是指示或暗示所指的装置或元件所必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
21.此外,应当理解,为了便于描述,附图中所示出的各个部件的尺寸并不按照实际的比例关系绘制,例如某些层的厚度或宽度可以相对于其他层有所夸大。
22.应注意的是,相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义或说明,则在随后的附图的说明中将不需要再对其进行进一步的具体讨论和描述。
实施例
23.在进行光纤工业内窥镜的组装过程中使用了,本实用新型提供的一种光纤工业内窥镜组装设备,本设备主要针对内窥镜的延伸部位的头部进行组装,该部位是用于放置目镜和防护盖的,其组装形式较为简单,但是由于延伸部位是软质的材料,从而导致普通的组装设备难以将其进行组合,目前常用人工组合的方式进行组装,效率较低。
24.如图1-5所示,本实用新型提供一种技术方案:一种光纤工业内窥镜组装设备,包括组装机构1,组装机构1正面一侧安装有导出机构2,组装机构1包括安装架101,安装架101侧面为c形结构,安装架101侧面安装有竖式运输带102,竖式运输带102侧面顶部等距安装有卡扣105,安装架101顶部两侧分别安装有原料运输带103,安装架101顶部位于原料运输带103背面的位置分别安装有机械臂104,机械臂104的活动端安装有升降气缸106,升降气缸106底部固定连接有端架107,端架107底部两侧分别固定连接有侧板108,侧板108的相反侧分别安装有推杆109,推杆109输出端分别固定连接有相适配的夹持爪110,组装机构1背
面安装有控制器3,竖式运输带102、原料运输带103、机械臂104、升降气缸106、推杆109和导出机构2分别与控制器3电性连接,夹持爪110和卡扣105均为半圆形结构。
25.需要注意的是,在使用本设备时,需要手动的将内窥镜的延伸部位安装在竖式运输带102的卡扣105上,目镜及防护罩分别放置在两个运料运输带103上,在延伸部位随着竖式运输带102进行前进的过程中,机械臂104通过活动端设置的升降气缸106、推杆109和夹持爪110的组合形式夹持机构,将目镜和防护罩放置在延伸部位的头部进行组装,通过设置的组装机构1能够利用竖式运输带102上的卡扣105对工业内窥镜的延伸部位进行固定,并利用成对设置的机械臂104和原料运输带能够对其安装在延伸部位的零件进行组装,以此实现内窥镜的便捷组装操作。
26.导出机构2包括导出运输带201,导出运输带201侧面固定连接有边架202,边架202的另一侧安装有倾斜放置的导出电机203,导出电机203输出端固定连接有导出丝杠204,导出丝杠204外壁螺纹连接有丝套205,边架202侧面贯穿开设有供丝套205滑动的斜滑口,丝套205侧面贯穿斜滑口后固定连接有导出气缸206,导出气缸206输出端固定连接有机械爪207,边架202侧面位于机械爪207下方的位置固定连接有挡杆208,挡杆208高度大于导出运输带201高度。
27.需要注意的是,由于内窥镜还有其他零件需要进行组装,因此通过设置的导出机构2,能够对组装完毕后的内窥镜进行引导运输,从而使得其脱离组装机构1,进行下一步的加工,具体为机械爪207将延伸部位进行夹持,通过导出电机203的引导和挡杆208的阻隔使得,整个延伸部位能够横向的躺在导出运输带201上完成其平稳的转移操作。
28.需要注意的是,设备的控制由控制器3进行控制,控制器3能够控制各个运输带的运料速度以及对不同原料零部件的夹持力度。
29.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附实施例及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。