1.本发明属于生产线技术领域,涉及一种人造卫星组装产线。
背景技术:
2.人造卫星时环绕在地球空间轨道上运行的无人航天器,主要作用与科学探测与研究、天气预报、土地资源调查、土地利用、区域规划、通信、跟踪、导航等各个领域。
3.现有的人造卫星生产产线一般包括一个分装工作台、一个组装工作台与若干机械臂,进行装配工作时,通过运动平台将各零部件先运送至分装工作台,通过人工或组装机械臂将各部件先行装配成部件总成,然后再通过运送平台将各组装好的部件总成运送至合装工作台通过人工或组装机械臂进行再加工,使得各部件总成整合形成完整的人造卫星。
4.但在实际装配过程中,各部件总成的装配时间不等,一些结构较为简洁的部件总成分装所需时间较少,而一些繁琐的部件总成分装需要耗费大量的时间,从而造成分装工作台与合装工作台工作无法有效进行协调,合装作业需要频繁等待分装作业完成后才能继续进行,进而造成人造卫星的组装生产效率低下的问题。
技术实现要素:
5.本发明的目的是针对现有的技术存在上述问题,提出了一种人造卫星组装产线,本发明所要解决的技术问题是:如何提高人造卫星的组装生产效率。
6.本发明的目的可通过下列技术方案来实现:一种人造卫星组装产线,包括分装产线与合装产线,其特征在于,所述分装产线,包括组装机械臂和分装工位,每个所述分装工位上设有夹持装置一,所述夹持装置一上设有用于固定卫星舱板的夹具,所述合装产线上设有用于固定卫星舱板的随行工装与用于组装卫星舱板的合装机械臂。
7.本人造卫星组装产线包括分装产线和合装产线分装产线包括若干个分装工位,每个分装工位上都设有夹持装置一,在卫星组装过程中,每个夹持装置一都能够夹持住一一个装有人造卫星舱板的夹具,使得在各人造卫星舱板上安装零部件时人造卫星舱板不会发生位移,分装产线上设有组装机械臂,分装工作中,分装产线能够通过组装机械臂将物料台上的各零部件进行拾取,并通过组装机械臂将该些零部件有序装配至人造卫星舱板上;分装工作完毕后,能够通过运送机器人能够将载有人造卫星舱板的夹具搬运至合装产线,合装产线上设有随行工装与合装机械臂,随行工装具体为在进行合装工作时用于为各人造卫星舱板提供合装环境的支撑平台,合装机械臂能够按照设定程序对各人造卫星舱板进行有序合装,实际合装过程中,分装产线与合装产线同步进行工作,分装产线的若干个分装工位通过组装机械臂同时对多块人造卫星舱板进行分装工序,使得合装工作与分装工作能够协同进行,从而对分装产线与合装产线进行调度,使分装产线与合装产线的装配工作更加合理、流畅,进而提高人造卫星的组装生产效率。
8.在上述的人造卫星组装产线中,所述合装产线包括至少三个用于将若干卫星舱板进行组装的合装工位,且每个所述合装工位上均设有用于夹持随行工装的夹持装置二,运
送机器人能够依照预设指定路线将随行工装运送至各合装工位并通过所述夹持装置二固定。
9.合装产线至少包括三个合装工位,各合装工位均用于组装各人造卫星舱板,每个合装工位上均设置有夹持装置二,运送机器人在将人造卫星运送至合装产线上时,夹持装置二能够将随行工装固定在某一个合装工位上,以此使得人造卫星舱板能够稳定的放置在该合装工位上,在该工位通过合装机械臂对两块或多块人造卫星舱板进行合装固定,此时随行工装上具有多块合装在一起的人造卫星舱板,然后运送机器人能够运送随行工装至下一合装工位,在此合装工位上再进行其他人造卫星舱板的合装工作,合装完毕后运载机器人再运送随行工装至下一合装工位进行各其余人造卫星舱板的合装,直至所有人造卫星舱板全部合装在一起,使各人造卫星舱板构成完整的人造卫星,相比于现有技术中一个合装工位完成全部工作而言,本合装产线的布局更为合理,各合装工位的分工更加明确,由此进一步提升人造卫星的组装生产效率。
10.在上述的人造卫星组装产线中,所述合装产线还包括取物机械臂与若干置物架,若干所述置物架位置分别与各合装工位相对应,运送机器人能够将所述分装产线的人造卫星舱板运送至置物架,所述取物机械臂能够将置物架上的人造卫星舱板运送并固定在随行工装上。
11.合装产线还包括若干个置物架和取物机械臂,在分装工作完成后且运送机器人需要将各块人造卫星舱板运分别运送至合装产线上的各个合装工位上时,由于合装产线上的随行工装只有一个,运送机器人无法将所有人造卫星舱板都放置在一个随行工装上,且直接将人造卫星舱板放置在各合装工位的夹持装置二上极为可能造成人造卫星舱板、夹具受到损伤,所以在各分装工位完成分装工作后,运送机器人能够将各载有人造卫星舱板的夹具运送至各置物架上进行暂存,而运送机器人只需将其中一块人造卫星舱板运送至合装产线的某合装工位上即可,在合装过程中,取物机械臂能够将需要进行装配的人造卫星舱板夹持并运送至相应的合装工位上通过合装机械臂进行合装工作,合装工作完成后通过运送机器人将合装在一起的人造卫星舱板连同随行工装移动运送至下一合装工位上进行下一步合装工作即可,从而保证合装工作更为有序、高效,保证人造卫星的组装生产效率更高。
12.在上述的人造卫星组装产线中,所述组装机械臂包括至少一个用于夹取零部件并将其放置在人造卫星舱板上的取料机械臂以及至少两个用于将零部件固定在人造卫星舱板上的安装机械臂。
13.在现有技术中,单个机械臂安装零部件时,机械臂无法携带大量所需要安装的零部件以及紧固件,所以机械臂需要频繁往返于物料台与分装产线之间,所浪费的时间较多,本人造卫星的组装产线中,组装机械臂包括至少一个用于夹取零部件并将零部件用的取料机械臂、用于将各零部件固定在人造卫星舱板上的安装机械臂,使用过程中,单独通过一个取料机械臂往返于分装产线与物料台之间,将各需要装配在人造卫星舱板上的零部件以及紧固件夹取并放置在人造卫星舱板的指定位置上,再通过两个组装机械臂同时在各块人造卫星舱板上对各零部件与紧固件进行装配,由此有效减少人造卫星舱板分装工艺所要耗费的时间,从而提高分装效率,进而保证人造卫星的组装生产效率更高。
14.在上述的人造卫星组装产线中,所述夹持装置一能够带动人造卫星舱板进行翻转、升降。
15.在对人造卫星舱板进行分装时,一些零部件需要安装在人造卫星舱板的内侧壁上,另一些零部件需要安装在人造卫星舱板的外侧壁上,为避免对零部件进行安装时还需要将人造卫星舱板拆卸、翻转并固定,在人造卫星舱板一侧安装好零部件后,夹持装置一能够直接带动人造卫星舱板进行翻、升降无需对人造卫星舱板进行拆卸,以此保证分装工作效率更高,进而保证人造卫星的组装生产效率更高。
16.在上述的人造卫星组装产线中,所述合装产线还包括用于对人造卫星舱板进行精度检测的检测工位一、对人造卫星舱板进行电测的检测工位二以及对人造卫星舱板进行热实验检测的检测工位三,所述检测工位一与检测工位三位于第二个所述合装工位与第三个合装工位之间,所述检测工位二位于所述合装产线一侧。
17.合装产线还包括用于对人造卫星舱板进行精度检测的检测工位一、对人造卫星舱板进行电测的检测工位二以及对人造卫星舱板进行热实验检测的检测工位三,检测工位一、检测工位三位于第二个合装工位与第三个合装工位之间,检测工位二位于合装产线的一侧,该些检测工位能够采用抽样检测的形式对人造卫星各项指标进行检测,以抽样检测得到的数据推算各人造卫星舱板的合装是否达到预计效果。
18.在上述的人造卫星组装产线中,所述夹具包括用于安装人造卫星舱板的框体一与用于安装固定框体一的框体二,且所述夹持装置一夹持在所述框体二上,运送机器人能够将载有人造卫星舱板的夹具搬运至合装产线的置物架上,所述取物机械臂能够夹取框体一并将其放置在随行工装上。
19.夹具包括框体一与框体二,人造卫星舱板安装固定在框体一上,框体一安装固定在框体二上,夹持装置一夹持在框体二上,避免夹持装置一直接夹持在人造卫星舱板上造成人造卫星舱板变形、裂纹,分装工作完成后,运送机器人能够将夹具整体搬运至合装产线上的置物架上进行暂存,进行合装时,取物机械臂能够将搭载有人造卫星舱板的框体一夹取并运送至随行工装上,避免取物机械臂夹取时力度过大造成人造卫星舱板受损。
20.在上述的人造卫星组装产线中,所述分装产线上设有天轨架一与地轨架,所述合装产线上设有天轨架二与天轨架三,所述安装机械臂滑动设置在所述天轨架一上,所述取料机械臂滑动设置在地轨架上,所述合装机械臂滑动设置在所述天轨架二上,所述取物机械臂滑动设置在天轨架三上。
21.分装产线上设有天轨架一与地轨架,安装机械臂滑动设置在天轨架一上,取料机械臂滑动设置在地轨架上,进行分装工作时,取料机械臂能够在地轨架上滑动,以此保证取料机械臂能以一对多的方式将所需要安装的零部件放置在各块人造卫星舱板的指定安装位置上,安装机械臂能够在天轨架一上滑动,以此保证安装机械臂能以一对多的方式将所需要安装的零部件固定在人造卫星舱板上,且取料机械臂与安装机械臂分开设置,避免两者工作时发生干涉,合装产线上设有天轨架二与天轨架三,取物机械臂滑动设置在天轨架三上,以此保证取物机械臂能以一对多的方式将各舱板由置物架转移至合装工位上,合装机械臂滑动设置在天轨架二上,以此保证合装机械臂能在天轨架二上滑动并以一对多的方式对各块人造卫星舱板进行合装,此外,取物机械臂与合装机械臂分开安装,也能够避免两者工作时发生干涉。
22.在上述的人造卫星组装产线中,所述分装产线末端设有分装预留工位,所述合装产线一侧设有若干合装预留工位。
23.保证在组装结构较为简单的人造卫星时,各产线的规模保持在此状态即可,避免资源过度浪费,在组装结构较为复杂的人造卫星时,能够启用各分装预留工位与各合装预留工位,保证产线设置更加合理化,有效提高组装生产效率。
24.与现有技术相比,本人造卫星组装产线具有以下优点:
25.一、本人造卫星组装产线通过分装产线与合装产线同步进行工作,使运送机器人能够将分装完成的人造卫星舱板运送至合装产线进行合装工作,使得合装工作与分装工作能够协同进行,通过合理分配分装产线与合装产线的装配工作,以此使分装产线与合装产线的装配工作更加合理、流畅,进而提高人造卫星的组装生产效率。
26.二、合装产线至少包括三个合装工位,每个合装工位上均设置有夹持装置二,运送机器人在将载有人造卫星舱板的夹具运送至合装产线上并通过夹持装置二将夹具进行固定,然后在各合装工位上分别组装不同的人造卫星舱板,以此使得合装产线布局更为合理,各合装工位的分工更加明确,使得合装产线能够同时对多个人造卫星进行合装工作,由此进一步提升人造卫星的组装生产效率。
27.三、各分装工位完成分装工作后,运送机器人能够连同夹具将各块人造卫星舱板运送至各置物架上进行暂存,合装过程中,取物机械臂能够将需要进行装配的人造卫星舱板夹持并运送至相应的合装工位上通过合装机械臂进行合装工作,从而保证合装工作更为有序、高效,保证人造卫星的组装生产效率更高。
28.四、取料机械臂往返于分装产线与物料台之间,将各零部件、紧固件夹取并放置在人造卫星舱板上,组装机械臂在各块人造卫星舱板上对各零部件与紧固件进行装配,提高分装效率,进而保证人造卫星的组装生产效率更高。
29.五、夹持装置一能够带动载有人造卫星舱板的夹具进行翻转、升降,无需对人造卫星舱板进行拆卸,以此保证分装工作效率更高,进而保证人造卫星的组装生产效率更高。
30.六、合装产线还包括用于对人造卫星舱板进行精度检测的检测工位一、对人造卫星舱板进行电测的检测工位二以及对人造卫星舱板进行热实验检测的检测工位三,检测工位一、检测工位三位于第二个合装工位与第三个合装工位之间,检测工位二位于合装产线的一侧,该些检测工位能够采用抽样检测的形式对人造卫星各项指标进行检测,以抽样检测得到的数据推算各人造卫星舱板的合装是否达到预计效果。
31.七、通过框体一搭载人造卫星舱板,分装工作完成后,运送机器人能够将夹具整体搬运至合装产线上的置物架上进行暂存,进行合装时,取物机械臂能够将搭载有人造卫星舱板的框体二夹取并运送至随行工装上,避免取物机械臂夹取时力度过大造成人造卫星舱板受损。
32.八、安装机械臂滑动设置在天轨架一上,取料机械臂滑动设置在地轨架上,取料机械臂与安装机械臂分开设置,避免两者工作时发生干涉,取物机械臂滑动设置在天轨架三上,合装机械臂滑动设置在天轨架二上,取物机械臂与合装机械臂分开安装,也能够避免两者工作时发生干涉。
附图说明
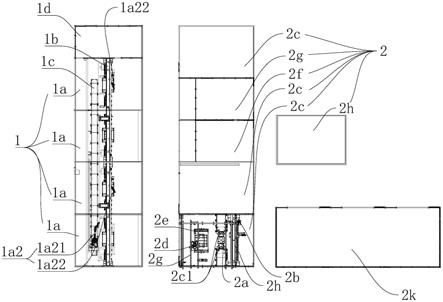
33.图1是本人造卫星组装产线的平面示意图。
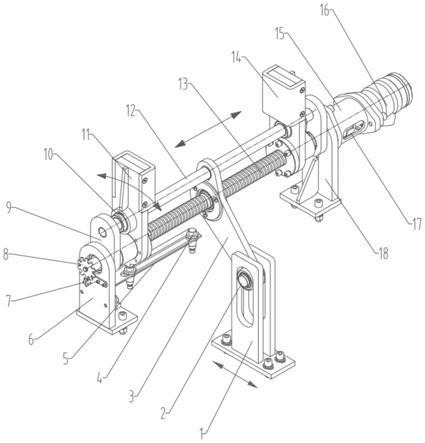
34.图2是分装工位的结构示意图。
35.图3是合装工位的结构示意图。
36.图中,1、分装产线;1a、分装工位;1a1、夹持装置一;1a11、夹具;1a111、框体一;1a112、框体二;1a2、组装机械臂;1a21、取料机械臂;1a22、安装机械臂;1b、天轨架一;1c、地轨架;2、合装产线;1d、分装预留工位;2a、随行工装;2b、合装机械臂;2c、合装工位;2c1、夹持装置二;2d、取物机械臂;2e、置物架;2f、检测工位一;2g、检测工位二;2h、检测工位三;2i、天轨架二;2j、天轨架三;2k、合装预留工位。
具体实施方式
37.以下是本发明的具体实施例并结合附图,对本发明的技术方案作进一步的描述,但本发明并不限于这些实施例。
38.如图1-3所示,本人造卫星组装产线包括分装产线1与合装产线2,两条产线相对设置,且两者之间留有通道,分装产线1包括至少四个分装工位1a,合装产线2包括至少三个合装工位2c,每个分装工位1a上都设有一个夹持装置一1a1,夹持装置一1a1具体为变位机,变位机具体用于夹持载有人造卫星舱板的夹具1a11,保证人造卫星舱板在装配零件的过程中不会发生位移,此外,变位机还能够控制人造卫星舱板进行翻转、升降,以保证需要对人造卫星舱板另一侧进行安装零部件时无需将舱板拆卸下来,从而保证装配的便捷性与效率。
39.如图1-2所示,分装产线1的上方固定设置有一个天轨架一1b,下方设置有地轨架1c,分装产线1还包括组装机械臂1a2,组装机械臂1a2具体包括一个用于将备料区零部件夹取并放置在人造卫星舱板指定安装位置的取料机械臂1a21以及两个用于将该些零部件以及紧固件固定在人造卫星舱板上的安装机械臂1a22,且取物机械臂2d滑动设置在地轨架1c上,两个安装机械臂1a22均滑动设置在天轨架一1b上。
40.分装工作进行前,生产人员会将人造卫星舱板固定在夹具1a11上,夹具1a11具体包括螺接在一起的框体一1a111与框体二1a112,人造卫星舱板可拆卸在框体一1a111上,夹持装置一1a1夹持在框体二1a112上,以防止夹持装置一1a1在固定人造卫星舱板时力度过大对人造卫星舱板形变、裂纹,然后取料机械臂1a21往返于物料台与分装产线1之间,以一对四的方式将各个需要装配在人造卫星舱板上的零部件放置在人造卫星舱板上的指定区域上,此时每个安装机械臂1a22以一对二的方式将各零部件通过紧固件锁紧的方式固定在人造卫星舱板上,从而完成分装工作。
41.如图1-3所示,合装产线2包括至少三个合装工位2c、检测工位一2f、检测工位二2g以及检测工位三2h,该些合装工位2c与检测工位呈直线排布,检测工位一2f与检测工位三2h位于第二个合装工位2c与第三个合装工位2c之间且两个检测工位相邻,检测工位二2g位于合装产线2一侧,在多块人造卫星舱板经过第一个合装工位2c与第二个合装工位2c进行合装后,合装所形成的卫星总成能够经过检测工位一2f进行装配精确度检测,再经过检测工位二2g对人造卫星进行电测,再经过检测工位三2h进行热实验性检测,从而保证合装所形成的人造卫星质量符合制造标准。
42.如图1与图3所示,每个合装工位2c内均放置有一个置物架2e,且每个合装工位2c上均设置有夹持装置二2c1,夹持装置二2c1与夹持装置一1a1相同,均为变位机,运送机器人能够根据指令在分装产线1与合装产线2之间移动,将载有人造卫星舱板的夹具1a11运送至各个合装工位2c内对应的置物架2e上,从而保证各合装工位2c能够正常进行合装工作。
43.如图1与图3所示,合装产线2上设有一个取物机械臂2d与一个合装机械臂2b,且合装产线2上还设有一个天轨架二2i与一个天轨架三2j,合装机械臂2b滑动设置在天轨架二2i上,取物机械臂2d滑动设置在天轨架三2j上,第一个合装工位2c上设置有随行工装2a,随行工装2a具体作用是用于为各块人造卫星舱板的合装提供承载平台,通常情况下,随行工装2a装配在第一个合装工位2c上;进行合装工作时,取物机械臂2d将置于置物架2e上载有人造卫星舱板的框体一1a111夹取并运送至随行工装2a上,通过随行工装2a将载有人造卫星舱板的框体一1a111进行固定,然后通过合装机械臂2b对随行工装2a上的多块人造卫星舱板进行合装固定,此时运送机器人能够根据指令将夹取将随行工装2a托起并运往下一个合装工位2c,并将随行工装2a固定在下一个合装工位2c的夹持装置二2c1上,随后通过取物机械臂2d滑动在天轨架三2j上滑动至相应位置,并将位置与该合装工位2c相对应的置物架2e上的人造卫星舱板夹取并运送至随行工装2a上,通过合装机械臂进行下一步合装工作。
44.此外,运送机器人具体为agv,具有高度自动化以及小巧灵活的特点,避免生产车间内过于拥挤。
45.此外,如图1所示,分装产线1最末端预留有分装预留工位1d,合装产线2首端远离分装产线1的一侧设有多个合装预留工位2k,从而保证在组装结构较为简单的人造卫星时,各产线的规模保持在此状态即可,避免资源过度浪费,在组装结构较为复杂的人造卫星时,能够启用各分装预留工位1d与各合装预留工位2k,保证产线设置更加合理化,有效提高组装生产效率。
46.本文中所描述的具体实施例仅仅是对本发明精神作举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本发明的精神或者超越所附权利要求书所定义的范围。
47.尽管本文较多地使用了1、分装产线;1a、分装工位;1a1、夹持装置一;1a11、夹具;1a111、框体一;1a112、框体二;1a2、组装机械臂;1a21、取料机械臂;1a22、安装机械臂;1b、天轨架一;1c、地轨架;2、合装产线;1d、分装预留工位;2a、随行工装;2b、合装机械臂;2c、合装工位;2c1、夹持装置二;2d、取物机械臂;2e、置物架;2f、检测工位一;2g、检测工位二;2h、检测工位三;2i、天轨架二;2j、天轨架三;2k、合装预留工位等术语,但并不排除使用其它术语的可能性。使用这些术语仅仅是为了更方便地描述和解释本发明的本质;把它们解释成任何一种附加的限制都是与本发明精神相违背的。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。