1.本发明涉及一种腹部抗击打训练器,属于训练器械技术领域。
背景技术:
2.腹部抗击打训练需要借助他人配合训练,通过陪练员或教练员使用拳头或腿对训练者的腹部进行反复的高强度击打来实现腹部抗击打的目的,人工操作的过程对陪练员或教练员的体能消耗极大,而且非常占用时间,单个陪练人员也就能为一两位训练者提供腹部抗击打训练,而散打或拳击的训练者较多,教练或陪练根本无法满足为每个训练者都提供腹部抗击打训练服务,而市面上也没有利用器械替代人工击打进行腹部抗击打训练的机械,因此,十分需要一种能够满足散打、拳击训练者腹部抗击打训练的训练器械。
技术实现要素:
3.为了解决上述现有技术存在的不足,本发明提供了一种腹部抗击打训练器,模拟出拳的自动击打器械,出拳力度和速度均可调节,击打腹部时器械内部具有缓冲,避免硬冲击训练者腹部,提高训练效果,保护训练者安全,降低了陪练员和教练员的劳动强度,满足拳击、散打训练者的训练需求。
4.本发明解决其技术问题所采用的技术方案是:一种腹部抗击打训练器,包括框架箱体、升降杆、底架、伸缩出拳机构、拳套、动作执行机构、动力系统、控制器,底架顶部通过升降杆与框架箱体固定连接,框架箱体上设有一对向前方伸出的伸缩出拳机构,伸缩出拳机构端部设有拳套,框架箱体内设有与伸缩出拳机构连接的动作执行机构,通过动作执行机构驱使伸缩出拳机构模拟出拳动作,框架箱体内设有驱动动作执行机构的动力系统,动力系统与外接电源连接,动力系统上设有控制器,在框架箱体前端两侧设有牛角握把,控制器安装在牛角握把上,在框架箱体前端两侧设有腰带挂环,训练者站在拳套前方,通过升降杆使拳套调节至训练者腹部位置处,将腰带缠于训练者腰部,并固定在两侧腰带挂环上,防止训练者后撤,训练者双手握持牛角握把,便于绷劲和控制机器的运行,从而实现模拟人工出拳的腹部抗击打训练器,所述的伸缩出拳机构具有缓解冲击力和调节力度的功能,具体由直线滑轨、滑块、方套管、内螺纹管、螺纹杆、挡环、阻尼缸、阻尼杆、端板、安装座和端板辅助定位装置组成,在框架箱体顶部设有一对左右对称且平行的直线滑轨,在直线滑轨上设有通过滑块安装的方套管,直线滑轨前后端设有限位滑块的挡头,方套管顶部开设有扣槽,方套管的前端密封,在方套管的前端设有阻尼缸,阻尼缸前端设有能够伸缩的阻尼杆,阻尼缸内的阻尼杆根部设有拨液盘,拨液盘外径小于阻尼缸内径,拨也盘后端设有弹簧,阻尼缸内设有阻尼液,在方套管后方均设有固定在框架箱体上的内螺纹管,内螺纹管内螺纹旋入有螺纹杆,螺纹杆前端伸入方套管内,在方套管尾端的螺纹杆上设有挡环,在挡环前端套有顶住方套管的弹簧,旋转螺纹杆调节挡环的前后位置,控制方套管内弹簧的压缩行程,实现出拳力度的调节,在阻尼杆端部设有端板,端板前端设有安装拳套的安装座,在端板上设有防止其旋转和左右晃动的端板辅助定位装置,端板辅助定位装置同时能够环节空拳冲击时
的冲击力,所述的端板辅助定位装置由光轴和轴套座组成,在方套管两侧均设有一对轴套座,轴套座内均设有向前伸出的光轴,光轴螺纹旋入端板内,光轴从轴套座后端伸出,伸出端套有弹簧,光轴尾端设有限位弹簧的端帽。
5.进一步的,所述的动作执行机构能够实现驱动伸缩出拳机构的反复前后出拳动作,具体有轴套架、轴杆、拉臂、扭簧、棘爪、导轮、固定板、抬杆轴、v型连杆、带轮盘和小连杆组成,在框架箱体后端设有一对轴套架,轴套架上均套有能前后滑动的轴杆,轴杆前端均铰接有拉臂,轴杆端部均设有下压拉臂的扭簧,拉臂前端两侧均设有一对导轮,导轮压在其下方的方套管上,在拉臂端部设有棘爪,棘爪仅能向后摆动,棘爪挂在方套管的扣槽上,通过拉动拉臂使方套管压缩其内部弹簧向后移动,在框架箱体内设有固定板,固定板上设有一对向两侧伸出的抬杆轴,抬杆轴位于拉臂和方套管间,拉动一定行程后,拉臂的导轮压过抬杆轴,棘爪从扣槽脱出,在固定板顶部间设有轴管,轴管上铰接有一对v型连杆,v型连杆另一端分别与左右两轴杆端部铰接,v型连杆两连杆在同一直线上时,轴杆向后伸出的行程最大,此时拉臂前端导轮压过抬杆轴,在框架箱体内设有通过轴架安装的带轮盘,带轮盘一侧上方边缘处铰接有小连杆,另一侧下方边缘处铰接有小连杆,两小连杆另一端分别于其上方的v型连杆的中部连杆铰轴铰接,带轮盘与小连杆组成曲轴连杆机构,带轮盘运转,通过小连杆拉动v型连杆的夹角反复变化,从而拉动轴杆反复伸缩,轴杆通过拉臂反复拉动方套管,再脱出扣槽,实现反复的出拳动作。
6.进一步的,所述的动力系统能够实现控制动作执行机构的反复运转和运转速度,具体由伺服电机、电源开关和伺服电机驱动器组成,在框架箱体内设有伺服电机、电源开关和伺服电机驱动器,伺服电机的轴端设有带轮,带轮通过皮带与动作执行机构连接,电源开关与外接电源连接,通过伺服电机驱动器驱动伺服电机;控制器通过缆线与伺服电机驱动器连接,控制伺服电机的运转和增减速。
7.进一步的,所述的拳套的尺寸和硬度可根据需求更换。
8.该装置能够模拟反复的出拳动作,并且具备一定的冲击力,冲击力度可通过压缩方套管43内的弹簧实现,当拳套5击中训练者腹部时,阻尼杆48能起到缓冲作用,时击打在训练者腹部的冲击力更具有柔性,消除多余振动,防止冲击训练者内脏系统,同时端板辅助定位装置在拳套5弹出最大行程后,避免阻尼杠47端盖的硬冲击,提高产品使用寿命,防止阻尼杠47漏液,同时泄载拳套5打出最大行程后继续前行的惯性力。整个装置占用空间小,能够有效的降低陪练员和教练员的劳动强度,省去人工击打的环节,并且满足拳击、散打训练者的训练需求。
9.本发明的有益效果是:解决了腹部抗击打训练需要人工击打的问题,提供了一种模拟出拳的自动击打器械,出拳力度和速度均可调节,击打腹部时器械内部具有缓冲,避免硬冲击训练者腹部,提高训练效果,保护训练者安全,结构简单,方便调节,降低了陪练员和教练员的劳动强度,满足拳击、散打训练者的训练需求。
附图说明
10.下面结合附图和具体实施方式对本发明进一步说明。
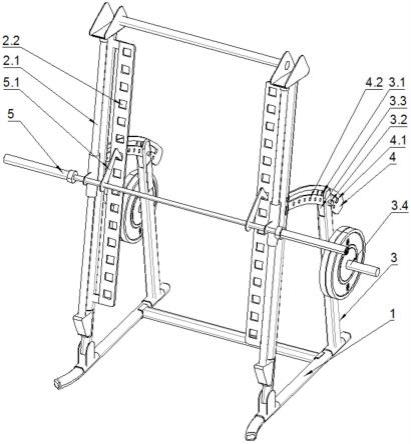
11.图1为本发明的结构示意图。
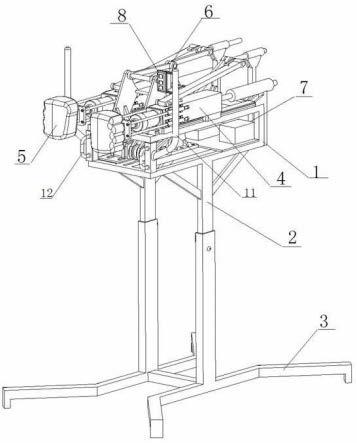
12.图2为本发明的部分结构示意图。
13.图3为本发明的伸缩出拳机构结构示意图。
14.图4为本发明的动作执行机构的结构示意图。
15.图5为本发明的动作执行机构的结构示意图。
16.图6为本发明的局部放大图。
17.图7为本发明的动作执行机构的结构示意图。
18.图8为本发明的部分结构示意图。
19.图中标号:1、框架箱体,2、升降杆,3、底架,4、伸缩出拳机构,5、拳套,6、动作执行机构,7、动力系统,8、控制器,11、牛角握把,12、腰带挂环,41、直线滑轨,42、滑块,43、方套管,44、内螺纹管,45、螺纹杆,46、挡环,47、阻尼缸,48、阻尼杆,49、扣槽,410、端板,411、安装座,412、光轴,413、轴套座,414、限位弹簧,61、轴套架,62、轴杆,63、拉臂,64、扭簧,65、棘爪,66、导轮,67、固定板,68、抬杆轴,69、v型连杆,610、带轮盘,611、小连杆,71、伺服电机,72、电源开关,73、伺服电机驱动器。
具体实施方式
20.如图1-8所示,一种腹部抗击打训练器,包括框架箱体1、升降杆2、底架3、伸缩出拳机构4、拳套5、动作执行机构6、动力系统7、控制器8,底架3顶部通过升降杆2与框架箱体1固定连接,框架箱体1上设有一对向前方伸出的伸缩出拳机构4,伸缩出拳机构4端部设有拳套5,框架箱体1内设有与伸缩出拳机构4连接的动作执行机构6,通过动作执行机构6驱使伸缩出拳机构4模拟出拳动作,框架箱体1内设有驱动动作执行机构6的动力系统7,动力系统7与外接电源连接,动力系统7上设有控制器8,在框架箱体1前端两侧设有牛角握把11,控制器8安装在牛角握把11上,在框架箱体1前端两侧设有腰带挂环12,训练者站在拳套5前方,通过升降杆2使拳套5调节至训练者腹部位置处,将腰带缠于训练者腰部,并固定在两侧腰带挂环12上,防止训练者后撤,训练者双手握持牛角握把11,便于绷劲和控制机器的运行,从而实现模拟人工出拳的腹部抗击打训练器,所述的伸缩出拳机构4具有缓解冲击力和调节力度的功能,具体由直线滑轨41、滑块42、方套管43、内螺纹管44、螺纹杆45、挡环46、阻尼缸47、阻尼杆48、端板410、安装座411和端板辅助定位装置组成,在框架箱体1顶部设有一对左右对称且平行的直线滑轨41,在直线滑轨41上设有通过滑块42安装的方套管43,直线滑轨41前后端设有限位滑块42的挡头,方套管43顶部开设有扣槽49,方套管43的前端密封,在方套管43的前端设有阻尼缸47,阻尼缸47前端设有能够伸缩的阻尼杆48,阻尼缸47内的阻尼杆48根部设有拨液盘,拨液盘外径小于阻尼缸47内径,拨也盘后端设有弹簧,阻尼缸47内设有阻尼液,在方套管43后方均设有固定在框架箱体1上的内螺纹管44,内螺纹管44内螺纹旋入有螺纹杆45,螺纹杆45前端伸入方套管43内,在方套管43尾端的螺纹杆45上设有挡环46,在挡环46前端套有顶住方套管43的弹簧,旋转螺纹杆45调节挡环46的前后位置,控制方套管43内弹簧的压缩行程,实现出拳力度的调节,在阻尼杆48端部设有端板410,端板410前端设有安装拳套5的安装座411,在端板410上设有防止其旋转和左右晃动的端板辅助定位装置,端板辅助定位装置同时能够环节空拳冲击时的冲击力,所述的端板辅助定位装置由光轴412和轴套座413组成,在方套管43两侧均设有一对轴套座413,轴套座413内均设有向前伸出的光轴412,光轴412螺纹旋入端板410内,光轴412从轴套座413后端伸出,伸出端套有
弹簧,光轴412尾端设有限位弹簧的端帽。
21.进一步的,所述的动作执行机构6能够实现驱动伸缩出拳机构4的反复前后出拳动作,具体有轴套架61、轴杆62、拉臂63、扭簧64、棘爪65、导轮66、固定板67、抬杆轴68、v型连杆69、带轮盘610和小连杆611组成,在框架箱体1后端设有一对轴套架61,轴套架61上均套有能前后滑动的轴杆62,轴杆62前端均铰接有拉臂63,轴杆62端部均设有下压拉臂63的扭簧64,拉臂63前端两侧均设有一对导轮66,导轮66压在其下方的方套管43上,在拉臂63端部设有棘爪65,棘爪65仅能向后摆动,棘爪65挂在方套管43的扣槽49上,通过拉动拉臂63使方套管43压缩其内部弹簧向后移动,在框架箱体1内设有固定板67,固定板67上设有一对向两侧伸出的抬杆轴68,抬杆轴68位于拉臂63和方套管43间,拉动一定行程后,拉臂63的导轮66压过抬杆轴68,棘爪65从扣槽49脱出,在固定板67顶部间设有轴管,轴管上铰接有一对v型连杆69,v型连杆69另一端分别与左右两轴杆62端部铰接,v型连杆69两连杆在同一直线上时,轴杆62向后伸出的行程最大,此时拉臂63前端导轮66压过抬杆轴68,在框架箱体1内设有通过轴架安装的带轮盘610,带轮盘610一侧上方边缘处铰接有小连杆611,另一侧下方边缘处铰接有小连杆611,两小连杆611另一端分别于其上方的v型连杆69的中部连杆铰轴铰接,带轮盘610与小连杆611组成曲轴连杆机构,带轮盘610运转,通过小连杆611拉动v型连杆69的夹角反复变化,从而拉动轴杆62反复伸缩,轴杆62通过拉臂63反复拉动方套管43,再脱出扣槽49,实现反复的出拳动作。
22.进一步的,所述的动力系统7能够实现控制动作执行机构6的反复运转和运转速度,具体由伺服电机71、电源开关72和伺服电机驱动器73组成,在框架箱体1内设有伺服电机71、电源开关72和伺服电机驱动器73,伺服电机71的轴端设有带轮71,带轮71通过皮带与动作执行机构6连接,电源开关72与外接电源连接,通过伺服电机驱动器73驱动伺服电机71;控制器8通过缆线与伺服电机驱动器73连接,控制伺服电机71的运转和增减速。
23.进一步的,所述的拳套5的尺寸和硬度可根据需求更换。
24.该装置能够模拟反复的出拳动作,并且具备一定的冲击力,冲击力度可通过压缩方套管43内的弹簧实现,当拳套5击中训练者腹部时,阻尼杆48能起到缓冲作用,时击打在训练者腹部的冲击力更具有柔性,消除多余振动,防止冲击训练者内脏系统,同时端板辅助定位装置在拳套5弹出最大行程后,避免阻尼杠47端盖的硬冲击,提高产品使用寿命,防止阻尼杠47漏液,同时泄载拳套5打出最大行程后继续前行的惯性力。整个装置占用空间小,能够有效的降低陪练员和教练员的劳动强度,省去人工击打的环节,并且满足拳击、散打训练者的训练需求。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。