1.本发明属于下肢外骨骼机器人技术领域,具体涉及一种模拟下肢外骨骼人机耦合的实验平台。
背景技术:
2.下肢外骨骼机器人的应用和研究已较为广泛,大多涉及医疗康复、战场助力等领域,穿戴者与外骨骼之间的耦合舒适性是评价一套外骨骼装置性能的重要指标,其可以通过人机耦合力来体现。但人机刚柔耦合具有非线性的特点:人体骨骼和机器人均有较高的刚度,而人的皮肤、肌肉、脂肪以及人机耦合的绑带等都有很明显的柔性特征,人腿和外骨骼之间的摩擦、冲击以及振动也均会消耗能量。当人机运动不协调时,外骨骼机器人的力就会经耦合绑带、皮肤、皮下组织和肌肉传递到人体骨骼,反之亦然。这个力的传导路径有着非常复杂的非线性关系,何况人体并不是一个均匀的有机体,当人群的性别、年龄、身高、体重以及体脂率等参数不同时,其质量分布、弹性模量等力学参数也会有或大或小的差异,此外,外骨骼与人体的耦合位置、松紧程度不同,也会对人机耦合力产生影响。
3.对于物理型人机交互方式而言,核心就是人与外骨骼机器人之间的耦合品质,高效、舒适的人机耦合是外骨骼机器人研究的终极目标。一方面人机耦合力不能过大,否则会使穿戴者感到不适,并且会降低外骨骼的工作能效;另一方面人机耦合时滞应被有效控制,否则穿戴者可能会降低穿戴者对外骨骼机器人的信任度。从评估角度来看,人机耦合力决定了人体与外骨骼机器人耦合位置的舒适度;从控制角度来看,人机时滞耦合应该由外骨骼机器人来承担。如果外骨骼机器人系统对人机耦合力进行预测和补偿,把人机耦合力控制在一个恰当的范围,那么穿戴者的舒适性、安全性都将得到大大提升,行动能耗也将大大降低。
4.目前,现有的相关设备缺少能有效测量人机运动的误差(人体软组织变形量),而将人机耦合力与人机运动误差结合起来测量的设备则更为欠缺。
技术实现要素:
5.本发明的目的是解决上述问题,提供一种能够同时测量人机耦合力与人机运动误差,进而辨识出下肢外骨骼人机耦合参数的模拟下肢外骨骼人机耦合的实验平台。
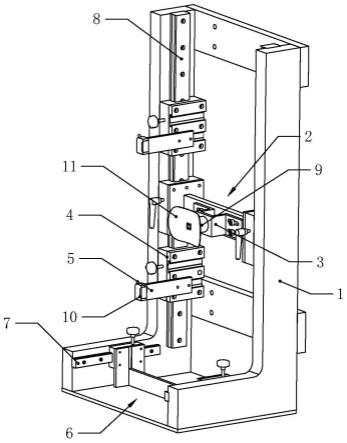
6.为解决上述技术问题,本发明的技术方案是:一种模拟下肢外骨骼人机耦合的实验平台,包括机架,力传感器上下滑动模组、力传感器安装基座、位移传感器上下滑块、位移传感器左右滑块、足限位挡板、力传感器、位移传感器和人机耦合绑带衬垫,机架上设有足限位挡板滑块导轨和传感器滑块导轨,力传感器上下滑动模组和位移传感器上下滑块分别与传感器滑块导轨相连;位移传感器左右滑块安装在位移传感器上下滑块内,位移传感器安装在位移传感器左右滑块的端部,足限位挡板与足限位挡板滑块导轨相连;力传感器安装在力传感器安装基座上,力传感器安装基座与力传感器上下滑动模组连接,力传感器的端部与人机耦合绑带衬垫相连;通过调节足限位挡板的位置来限制实验人员所耦合的下肢
足部运动,通过调节力传感器上下滑动模组和位移传感器上下滑块的上下高度,通过力传感器来测量实验人员所耦合腿部不同高度的人机运动误差。
7.优选地,所述机架呈“l”字型结构,足限位挡板滑块导轨的数量为二且平行的分布在机架的底部,传感器滑块导轨的数量为二且平行,传感器滑块导轨竖向的分布在机架内,足限位挡板滑块导轨上设有足限位挡板滑块导轨孔,传感器滑块导轨上设有传感器滑块导轨孔,螺栓分别穿过足限位挡板滑块导轨孔和传感器滑块导轨孔,将足限位挡板滑块导轨和传感器滑块导轨分别与机架固连。
8.优选地,所述力传感器上下滑动模组包括上下滑动模组块、上下滑动模组连杆和上下滑动模组旋转螺丝,上下滑动模组块的数量为二且分别位于上下滑动模组连杆的两端;上下滑动模组块为长方体结构,上下滑动模组块上设有上下滑动模组块凹槽,上下滑动模组块通过上下滑动模组块凹槽与传感器滑块导轨滑动连接,上下滑动模组旋转螺丝的端部穿过上下滑动模组块与传感器滑块导轨抵接,从而固定上下滑动模组块在传感器滑块导轨上的位置;上下滑动模组连杆上设有上下滑动模组连杆槽和上下滑动模组连杆通孔,力传感器安装基座通过上下滑动模组连杆槽和上下滑动模组连杆通孔与上下滑动模组连杆相连。
9.优选地,所述力传感器安装基座呈“几”字型结构,力传感器安装基座上分别设有力传感器安装基座孔、力传感器安装基座通槽和力传感器安装基座连接键,传感器安装基座孔呈圆形状阵列分布在力传感器安装基座的顶部,力传感器安装基座通槽的数量为四,两个力传感器安装基座通槽为一组位于力传感器安装基座的底部,力传感器安装基座连接键的数量为二且分布在力传感器安装基座的底部;力传感器安装基座安装在力传感器上下滑动模组上时,力传感器安装基座连接键与上下滑动模组连杆槽配合,螺栓依次穿过力传感器安装基座通槽和上下滑动模组连杆通孔将力传感器安装基座固定在上下滑动模组连杆上。
10.优选地,所述位移传感器上下滑块呈长方体结构,位移传感器上下滑块上设有位移传感器上下滑块凹槽、位移传感器上下滑块旋转螺丝和位移传感器连接块,位移传感器上下滑块凹槽和位移传感器连接块分别位于位移传感器上下滑块的两面;位移传感器上下滑块旋转螺丝穿过位移传感器上下滑块伸入位移传感器上下滑块凹槽内,传感器滑块导轨位于位移传感器上下滑块凹槽内,位移传感器连接块上设有位移传感器连接块凹槽和位移传感器连接块孔,位移传感器连接块凹槽的数量为二且平行布置,位移传感器左右滑块位于位移传感器连接块凹槽内,螺栓穿过位移传感器连接块孔将位移传感器连接块位移传感器上下滑块固连。
11.优选地,所述位移传感器左右滑块的端面向外凸出形成位移传感器左右滑块凸起,位移传感器左右滑块凸起的截面呈倒置的“凸”字型结构,位移传感器左右滑块上设有位移传感器左右滑块孔和位移传感器左右滑块定位孔,位移传感器通过位移传感器左右滑块孔安装在位移传感器左右滑块上,螺栓穿过位移传感器左右滑块定位孔与固定在位移传感器连接块抵接。
12.优选地,所述足限位挡板包括足限位挡板块、足限位挡板竖板和足限位挡板连接板,足限位挡板竖板的数量为二且分布在足限位挡板连接板的两端,足限位挡板块的端面与足限位挡板竖板相连,足限位挡板块上设有足限位挡板块凹槽和足限位挡板块螺丝,足
限位挡板滑块导轨位于足限位挡板块凹槽内,足限位挡板块螺丝穿过足限位挡板块后伸入足限位挡板块凹槽内部。
13.优选地,所述人机耦合绑带衬垫的截面呈圆弧状结构,人机耦合绑带衬垫的中部与力传感器相连。
14.本发明的有益效果是:
15.本发明所提供的一种模拟下肢外骨骼人机耦合的实验平台,各滑动模组均可至少在一个方向上滑动,因此可以满足不同高矮胖瘦的实验人员的实验测量,并且通过一个力传感器和两个位移传感器以及它们之间特定的位置关系可以同时测量或者换算出人机耦合力和人机运动误差,进而可辨识出下肢外骨骼人机耦合参数。
附图说明
16.图1是本发明一种模拟下肢外骨骼人机耦合的实验平台的总装配爆炸示意图;
17.图2是本发明机架的结构示意图;
18.图3是本发明力传感器上下滑动模组的结构示意图;
19.图4是本发明力传感器安装基座的结构示意图;
20.图5是本发明力传感器安装基座的俯视图;
21.图6是本发明位移传感器上下滑块的结构示意图;
22.图7是本发明位移传感器左右滑块的结构示意图;
23.图8是本发明足限位挡板的结构示意图。
24.附图标记说明:1、机架;2、力传感器上下滑动模组;3、力传感器安装基座;4、位移传感器上下滑块;5、位移传感器左右滑块;6、足限位挡板;7、足限位挡板滑块导轨;8、传感器滑块导轨;9、力传感器;10、位移传感器;11、人机耦合绑带衬垫;12、l型支架件第二凹槽;13、l型支架件第一凹槽;21、上下滑动模组块;22、上下滑动模组连杆;23、上下滑动模组旋转螺丝;24、上下滑动模组块凹槽;25、上下滑动模组连杆槽;26、上下滑动模组连杆通孔;31、力传感器安装基座孔;32、力传感器安装基座通槽;33、力传感器安装基座连接键;41、位移传感器上下滑块凹槽;42、位移传感器上下滑块旋转螺丝;43、位移传感器连接块;44、位移传感器连接块凹槽;45、位移传感器连接块孔;51、位移传感器左右滑块凸起;52、位移传感器左右滑块孔;53、位移传感器左右滑块定位孔;61、足限位挡板块;62、足限位挡板竖板;63、足限位挡板连接板;64、足限位挡板块凹槽;65、足限位挡板块螺丝。
具体实施方式
25.下面结合附图和具体实施例对本发明做进一步的说明:
26.如图1到图8所示,本发明提供的一种模拟下肢外骨骼人机耦合的实验平台,包括机架1,力传感器上下滑动模组2、力传感器安装基座3、位移传感器上下滑块4、位移传感器左右滑块5、足限位挡板6、力传感器9、位移传感器10和人机耦合绑带衬垫11,机架1上设有足限位挡板滑块导轨7和传感器滑块导轨8形成移动副,力传感器上下滑动模组2和位移传感器上下滑块4分别与传感器滑块导轨8相连。位移传感器左右滑块5安装在位移传感器上下滑块4内,位移传感器10安装在位移传感器左右滑块5的端部,足限位挡板6与足限位挡板滑块导轨7相连。力传感器9安装在力传感器安装基座3上,力传感器安装基座3与力传感器
上下滑动模组2连接,力传感器9的端部与人机耦合绑带衬垫11相连。通过调节足限位挡板6的位置来限制实验人员所耦合的下肢足部运动,通过调节力传感器上下滑动模组2和位移传感器上下滑块4的上下高度,通过力传感器9来测量实验人员所耦合腿部不同高度的人机运动误差。
27.机架1呈“l”字型结构,足限位挡板滑块导轨7的数量为二且平行的分布在机架1的底部,传感器滑块导轨8的数量为二且平行,传感器滑块导轨8竖向的分布在机架1内。足限位挡板滑块导轨7上设有足限位挡板滑块导轨孔,传感器滑块导轨8上设有传感器滑块导轨孔,螺栓分别穿过足限位挡板滑块导轨孔和传感器滑块导轨孔,将足限位挡板滑块导轨7和传感器滑块导轨8分别与机架1固连。
28.在本实施例中,机架1由两块平行设置的l型支架件通过连接板连接而成。l型支架件上设有l型支架件第一凹槽13和l型支架件第二凹槽12,l型支架件第一凹槽13和l型支架件第二凹槽12内均设有线性分布的凹槽孔。足限位挡板滑块导轨7安装在l型支架件第二凹槽12内,螺栓依次穿过足限位挡板滑块导轨孔和凹槽孔,将足限位挡板滑块导轨7固定在l型支架件第二凹槽12内,用同样的方法将传感器滑块导轨8固定在l型支架件第一凹槽13内。
29.限位挡板滑块导轨7和传感器滑块导轨8采用实心不锈钢制作增加稳定性,防止在进行人机耦合实验时产生晃动。
30.力传感器上下滑动模组2包括上下滑动模组块21、上下滑动模组连杆22和上下滑动模组旋转螺丝23,上下滑动模组块21的数量为二且分别位于上下滑动模组连杆22的两端。上下滑动模组块21为长方体结构,上下滑动模组块21上设有上下滑动模组块凹槽24,上下滑动模组块21通过上下滑动模组块凹槽24与传感器滑块导轨8滑动连接,上下滑动模组旋转螺丝23的端部穿过上下滑动模组块21与传感器滑块导轨8抵接,从而固定上下滑动模组块21在传感器滑块导轨8上的位置。上下滑动模组连杆22上设有上下滑动模组连杆槽25和上下滑动模组连杆通孔26,力传感器安装基座3通过上下滑动模组连杆槽25和上下滑动模组连杆通孔26与上下滑动模组连杆22相连。
31.在使用过程中,上下滑动模组块21在传感器滑块导轨8上的位置可调节,当调节好上下滑动模组块21的位置时,通过转动上下滑动模组旋转螺丝23,从而使得上下滑动模组旋转螺丝23的端部与传感器滑块导轨8抵接,从而将上下滑动模组块21进行固定。当需要对上下滑动模组块21的位置进行调节时,反向转动上下滑动模组旋转螺丝23,则可松开上下滑动模组块21与传感器滑块导轨8的接触,进而调节上下滑动模组块21的位置然后再固定。
32.在本实施例中上下滑动模组旋转螺丝23的结构呈“l”字型,上下滑动模组旋转螺丝23较短的端部设有螺纹结构,上下滑动模组旋转螺丝23较长的端部为手动旋转部分,便于工作人员转动上下滑动模组旋转螺丝23。上下滑动模组连杆通孔26的数量为多个且对称的分布在上下滑动模组连杆22上。
33.本发明中力传感器上下滑动模组2安装在传感器滑块导轨8上形成移动副,通过旋转上下滑动模组旋转螺丝23来实现锁定与解锁,在解锁状态下,上下滑动力传感器上下滑动模组2调节高度以测量腿部不同高度的人机耦合力。
34.力传感器安装基座3呈“几”字型结构,力传感器安装基座3上分别设有力传感器安装基座孔31、力传感器安装基座通槽32和力传感器安装基座连接键33,传感器安装基座孔
31呈圆形状阵列分布在力传感器安装基座3的顶部,力传感器安装基座通槽32的数量为四,两个力传感器安装基座通槽32为一组位于力传感器安装基座3的底部,力传感器安装基座连接键33的数量为二且分布在力传感器安装基座3的底部。力传感器安装基座3安装在力传感器上下滑动模组2上时,力传感器安装基座连接键33与上下滑动模组连杆槽25配合,螺栓依次穿过力传感器安装基座通槽32和上下滑动模组连杆通孔26将力传感器安装基座3固定在上下滑动模组连杆22上。
35.在本实施例中,力传感器安装基座通槽32的截面为边倒圆的矩形状。多个螺栓穿过力传感器安装基座通槽32后与不同位置的上下滑动模组连杆通孔26相连,进而使得力传感器安装基座3与上下滑动模组连杆22稳定连接。
36.力传感器安装基座3通过力传感器安装基座连接键33插入到力传感器上下滑动模组2中间的上下滑动模组连杆槽25中形成移动副,以此可以实现对应方向的滑动。
37.位移传感器上下滑块4呈长方体结构,位移传感器上下滑块4上设有位移传感器上下滑块凹槽41、位移传感器上下滑块旋转螺丝42和位移传感器连接块43,位移传感器上下滑块凹槽41和位移传感器连接块43分别位于位移传感器上下滑块4的两面。位移传感器上下滑块旋转螺丝42穿过位移传感器上下滑块4伸入位移传感器上下滑块凹槽41内,传感器滑块导轨8位于位移传感器上下滑块凹槽41内。位移传感器连接块43上设有位移传感器连接块凹槽44和位移传感器连接块孔45,位移传感器连接块凹槽44的数量为二且平行布置,位移传感器左右滑块5位于位移传感器连接块凹槽44内,螺栓穿过位移传感器连接块孔45将位移传感器连接块43位移传感器上下滑块4固连。
38.通过调节位移传感器上下滑块旋转螺丝42伸入位移传感器上下滑块凹槽41的距离,进而使得位移传感器上下滑块旋转螺丝42与传感器滑块导轨8抵接,进而将位移传感器上下滑块4固定在传感器滑块导轨8上。当需要调节位移传感器上下滑块4的位置时,反向转动位移传感器上下滑块旋转螺丝42即可松开与传感器滑块导轨8的接触。
39.位移传感器上下滑块4的数量为二分别安装在力传感器上下滑动模组2的上、下两个位置,并通过旋转位移传感器上下滑块旋转螺丝42来实现其在传感器滑块导轨8上的锁定与解锁。在解锁状态下上下滑动位移传感器上下滑块4来调节高度,以测量腿部不同高度的人机运动误差。每个位移传感器上下滑块4上均有上、下两条位移传感器连接块凹槽44,用以安装位移传感器左右滑块5。
40.位移传感器左右滑块5的端面向外凸出形成位移传感器左右滑块凸起51,位移传感器左右滑块凸起51的截面呈倒置的“凸”字型结构,位移传感器左右滑块5上设有位移传感器左右滑块孔52和位移传感器左右滑块定位孔53,位移传感器10通过位移传感器左右滑块孔52安装在位移传感器左右滑块5上,螺栓穿过位移传感器左右滑块定位孔53与固定在位移传感器连接块43抵接。
41.在本实施例中,位移传感器连接块凹槽44的截面和位移传感器左右滑块凸起51的截面相同,以便能够实现更好的配合。
42.位移传感器左右滑块5的位置根据实际使用需要进行安装,以便更好地完成位移传感器10的测量。位移传感器左右滑块孔52的数量为二,从而增加位移传感器10固定时的稳定性。
43.两个位移传感器左右滑块5均安装在位移传感器连接块凹槽44中,组装后形成移
动副。螺丝穿过位移传感器左右滑块定位孔53后与位移传感器连接块43抵接,来实现位移传感器左右滑块5的锁定与解锁,在解锁状态下滑动位移传感器左右滑块5调节位置,以寻找测量人机运动误差的最佳水平位置。
44.足限位挡板6包括足限位挡板块61、足限位挡板竖板62和足限位挡板连接板63,足限位挡板竖板62的数量为二且分布在足限位挡板连接板63的两端,足限位挡板块61的端面与足限位挡板竖板62相连,连接方式为螺栓连接。足限位挡板块61上设有足限位挡板块凹槽64和足限位挡板块螺丝65,足限位挡板滑块导轨7位于足限位挡板块凹槽64内,足限位挡板块螺丝65穿过足限位挡板块61后伸入足限位挡板块凹槽64内部。
45.足限位挡板块螺丝65与足限位挡板滑块导轨7的连接关系,与位移传感器上下滑块旋转螺丝42和传感器滑块导轨8之间的连接关系相同。
46.足限位挡板6的两端分别与足限位挡板滑块导轨7配合形成移动副,其上方的足限位挡板块螺丝65实现足限位挡板6位置的锁定与解锁,从而可调整位置,以此约束实验人员所耦合的下肢足部仅可前后运动。
47.人机耦合绑带衬垫11的截面呈圆弧状结构,人机耦合绑带衬垫11的中部与力传感器9相连,以此测量人机耦合力。
48.实验人员在使用时,腿部与人机耦合绑带衬垫11接触,通过力传感器9来测量腿部的人机耦合力。
49.本领域的普通技术人员将会意识到,这里所述的实施例是为了帮助读者理解本发明的原理,应被理解为本发明的保护范围并不局限于这样的特别陈述和实施例。本领域的普通技术人员可以根据本发明公开的这些技术启示做出各种不脱离本发明实质的其它各种具体变形和组合,这些变形和组合仍然在本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。