技术特征:
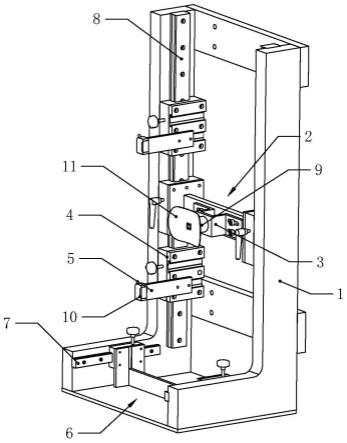
1.一种模拟下肢外骨骼人机耦合的实验平台,其特征在于:包括机架(1),力传感器上下滑动模组(2)、力传感器安装基座(3)、位移传感器上下滑块(4)、位移传感器左右滑块(5)、足限位挡板(6)、力传感器(9)、位移传感器(10)和人机耦合绑带衬垫(11),机架(1)上设有足限位挡板滑块导轨(7)和传感器滑块导轨(8),力传感器上下滑动模组(2)和位移传感器上下滑块(4)分别与传感器滑块导轨(8)相连;位移传感器左右滑块(5)安装在位移传感器上下滑块(4)内,位移传感器(10)安装在位移传感器左右滑块(5)的端部,足限位挡板(6)与足限位挡板滑块导轨(7)相连;力传感器(9)安装在力传感器安装基座(3)上,力传感器安装基座(3)与力传感器上下滑动模组(2)连接,力传感器(9)的端部与人机耦合绑带衬垫(11)相连;通过调节足限位挡板(6)的位置来限制实验人员所耦合的下肢足部运动,通过调节力传感器上下滑动模组(2)和位移传感器上下滑块(4)的上下高度,通过力传感器(9)来测量实验人员所耦合腿部不同高度的人机运动误差。2.根据权利要求1所述的一种模拟下肢外骨骼人机耦合的实验平台,其特征在于:所述机架(1)呈“l”字型结构,足限位挡板滑块导轨(7)的数量为二且平行的分布在机架(1)的底部,传感器滑块导轨(8)的数量为二且平行,传感器滑块导轨(8)竖向的分布在机架(1)内,足限位挡板滑块导轨(7)上设有足限位挡板滑块导轨孔,传感器滑块导轨(8)上设有传感器滑块导轨孔,螺栓分别穿过足限位挡板滑块导轨孔和传感器滑块导轨孔,将足限位挡板滑块导轨(7)和传感器滑块导轨(8)分别与机架(1)固连。3.根据权利要求1所述的一种模拟下肢外骨骼人机耦合的实验平台,其特征在于:所述力传感器上下滑动模组(2)包括上下滑动模组块(21)、上下滑动模组连杆(22)和上下滑动模组旋转螺丝(23),上下滑动模组块(21)的数量为二且分别位于上下滑动模组连杆(22)的两端;上下滑动模组块(21)为长方体结构,上下滑动模组块(21)上设有上下滑动模组块凹槽(24),上下滑动模组块(21)通过上下滑动模组块凹槽(24)与传感器滑块导轨(8)滑动连接,上下滑动模组旋转螺丝(23)的端部穿过上下滑动模组块(21)与传感器滑块导轨(8)抵接,从而固定上下滑动模组块(21)在传感器滑块导轨(8)上的位置;上下滑动模组连杆(22)上设有上下滑动模组连杆槽(25)和上下滑动模组连杆通孔(26),力传感器安装基座(3)通过上下滑动模组连杆槽(25)和上下滑动模组连杆通孔(26)与上下滑动模组连杆(22)相连。4.根据权利要求3所述的一种模拟下肢外骨骼人机耦合的实验平台,其特征在于:所述力传感器安装基座(3)呈“几”字型结构,力传感器安装基座(3)上分别设有力传感器安装基座孔(31)、力传感器安装基座通槽(32)和力传感器安装基座连接键(33),传感器安装基座孔(31)呈圆形状阵列分布在力传感器安装基座(3)的顶部,力传感器安装基座通槽(32)的数量为四,两个力传感器安装基座通槽(32)为一组位于力传感器安装基座(3)的底部,力传感器安装基座连接键(33)的数量为二且分布在力传感器安装基座(3)的底部;力传感器安装基座(3)安装在力传感器上下滑动模组(2)上时,力传感器安装基座连接键(33)与上下滑动模组连杆槽(25)配合,螺栓依次穿过力传感器安装基座通槽(32)和上下滑动模组连杆通孔(26)将力传感器安装基座(3)固定在上下滑动模组连杆(22)上。5.根据权利要求1所述的一种模拟下肢外骨骼人机耦合的实验平台,其特征在于:所述位移传感器上下滑块(4)呈长方体结构,位移传感器上下滑块(4)上设有位移传感器上下滑块凹槽(41)、位移传感器上下滑块旋转螺丝(42)和位移传感器连接块(43),位移传感器上下滑块凹槽(41)和位移传感器连接块(43)分别位于位移传感器上下滑块(4)的两面;位移
传感器上下滑块旋转螺丝(42)穿过位移传感器上下滑块(4)伸入位移传感器上下滑块凹槽(41)内,传感器滑块导轨(8)位于位移传感器上下滑块凹槽(41)内,位移传感器连接块(43)上设有位移传感器连接块凹槽(44)和位移传感器连接块孔(45),位移传感器连接块凹槽(44)的数量为二且平行布置,位移传感器左右滑块(5)位于位移传感器连接块凹槽(44)内,螺栓穿过位移传感器连接块孔(45)将位移传感器连接块(43)位移传感器上下滑块(4)固连。6.根据权利要求5所述的一种模拟下肢外骨骼人机耦合的实验平台,其特征在于:所述位移传感器左右滑块(5)的端面向外凸出形成位移传感器左右滑块凸起(51),位移传感器左右滑块凸起(51)的截面呈倒置的“凸”字型结构,位移传感器左右滑块(5)上设有位移传感器左右滑块孔(52)和位移传感器左右滑块定位孔(53),位移传感器(10)通过位移传感器左右滑块孔(52)安装在位移传感器左右滑块(5)上,螺栓穿过位移传感器左右滑块定位孔(53)与固定在位移传感器连接块(43)抵接。7.根据权利要求1所述的一种模拟下肢外骨骼人机耦合的实验平台,其特征在于:所述足限位挡板(6)包括足限位挡板块(61)、足限位挡板竖板(62)和足限位挡板连接板(63),足限位挡板竖板(62)的数量为二且分布在足限位挡板连接板(63)的两端,足限位挡板块(61)的端面与足限位挡板竖板(62)相连,足限位挡板块(61)上设有足限位挡板块凹槽(64)和足限位挡板块螺丝(65),足限位挡板滑块导轨(7)位于足限位挡板块凹槽(64)内,足限位挡板块螺丝(65)穿过足限位挡板块(61)后伸入足限位挡板块凹槽(64)内部。8.根据权利要求1所述的一种模拟下肢外骨骼人机耦合的实验平台,其特征在于:所述人机耦合绑带衬垫(11)的截面呈圆弧状结构,人机耦合绑带衬垫(11)的中部与力传感器(9)相连。
技术总结
本发明公开了一种模拟下肢外骨骼人机耦合的实验平台,包括机架,力传感器上下滑动模组、力传感器安装基座、位移传感器上下滑块、位移传感器左右滑块、足限位挡板、力传感器、位移传感器和人机耦合绑带衬垫,机架上设有足限位挡板滑块导轨和传感器滑块导轨形成移动副,力传感器上下滑动模组和位移传感器上下滑块分别与传感器滑块导轨相连。位移传感器左右滑块安装在位移传感器上下滑块内,位移传感器安装在位移传感器左右滑块的端部,足限位挡板与足限位挡板滑块导轨相连。力传感器安装在力传感器安装基座上,力传感器安装基座与力传感器上下滑动模组滑动连接,力传感器的端部与人机耦合绑带衬垫相连。合绑带衬垫相连。合绑带衬垫相连。
技术研发人员:严尧 弋攀 黄成 孙天逸 郭庆
受保护的技术使用者:电子科技大学
技术研发日:2022.04.29
技术公布日:2022/7/11
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。