1.本实用新型涉及铝锭生产技术领域,特别涉及一种铝锭自动摆放装置。
背景技术:
2.铝是一种轻金属,其化合物在自然界中分布极广,地壳中铝的资源约为400~500亿吨,仅次于氧和硅,居第三位。在金属品种中为第一大类金属。铝具有特殊的化学、物理特性,不仅重量轻、质地坚、而且具有良好的延展性、导电性、导热性、耐热性和耐核辐射性,是国民经济发展的重要基础原材料。
3.铝锭作为铝制品加工最主要的原材料之一,在生产运输过程中,需要进行一定叠放和码垛才能转移,所以目前生产铝锭结束后,需要人力进行一层层的叠放在脚锭(方形盘状体) 上,然后通过叉车或者输送装置转移出去,极其的费时费力。
4.现有解决办法是,利用机械手代替人力摆放,但机械手灵活度差、活动距离小,这就导致了每道工作步骤的时间延长,其中叠放铝锭前还得提前将托架或者脚锭摆放在机械手跟前,机械手才能进行叠放工作,不仅降低工作效率,而且还白白浪费了能源。
技术实现要素:
5.本实用新型的目的是提供一种铝锭自动摆放装置,具有自动为了转运机械手输送脚锭的效果。
6.本实用新型的上述技术目的是通过以下技术方案得以实现的:一种铝锭自动摆放装置,包括两条并列的生产输送带、一条运输带、转运机械手,所述运输带和转运机械手位于生产传送带之间,所述转运机械手位于运输带的一端,所述生产输送带下方设有垂直于运输带的脚锭输送装置,所述脚锭输送装置位于转运机械手和运输带之间,所述脚锭输送装置包括固定在所述生产输送带下方的输送台,所述输送台的两侧分别设有传动链,所述输送台上设有驱动所述传动链的驱动装置,所述传动链上固定设有一对保持间距推动板一和推动板二,所述输送台远离运输带的一端固定设有上料框,所述上料框内叠放装有多个脚锭,所述传动链位于上料框和输送台之间,所述上料框位于输送台的台面上开设有出口,所述推动板一和推动板二能推动脚锭并通过所述出口。
7.通过采用上述技术方案,当生产输送带输送铝锭过来时,启动驱动装置驱动传动链,上料框最底部脚锭,会被输送台两侧传动链上的推动板一,推出上料框的出口,与此同时上料框内的脚锭则会依次下降,推动板一后方的推动板二就将第二个脚锭推出出口,其中前后脚锭的距离和推动板一和推动板二的间距一致,待两者共同将两个脚锭输送到转运机械手和运输带之间时,驱动装置停止驱动传动链,转运机械手开始工作,将生产输送带上的铝锭,依次叠放在运输带上的脚锭上,直至叠放到设定好的高度,转运机械手就将脚锭和铝锭一同推到运输带的一端运输离开,再次启动驱动装置驱动传动链,推动板一和推动板二就会经过移动台下方绕回到输送台的上料框前,进行脚锭后续输送的工作。
8.本实用新型的进一步设置为:所述传动链固定设有一对保持间距的推动板三和推
动板四,所述推动板三和推动板四的间距与推动板一和推动板二的间距相同,且分别位于传动链的两侧。
9.通过采用上述技术方案,推动板三和推动板四能够在推动板一和推动板二推完返回前,提前移动到上料框的前方,等待输送脚锭的工作,从而节省了推动板一和推动板二返程时所需的时间,两者不断交替工作,提高脚锭输送装置的效率。
10.本实用新型的进一步设置为:所述驱动装置包括电机,所述电机的输送端固定连接有蜗轮蜗杆减速器,所述传动链包一对链轮,所述链轮上套有链条,所述推动板一、推动板二、推动板三、推动板四分别固定连接所述链条,所述输送台的两端转动连接有传动杆,所述传动杆的两端固定插接所述链轮,所述蜗轮蜗杆减速器输出端固定连接所述传动杆。
11.通过采用上述技术方案,电机传动蜗轮蜗杆减速器,而蜗轮蜗杆减速器传动传动杆和链轮转动,链轮转动则带动链条上的推动板一、推动板二、推动板三、推动板一输送脚锭,其中利用一个传动杆,能同时驱动输送台的两侧传动链,保持两者的同步输送,而蜗轮蜗杆减速器,能降低电机输出的转速和扭矩,保证输送的稳定。
12.本实用新型的进一步设置为:所述输送台位于转运机械手和运输带之间的一端固定设有限位板,所述限位板上固定设有光传感器,所述光传感器控制所述转运机械手和驱动装置的启停。
13.通过采用上述技术方案,当脚锭输送到转运机械手和运输带之间时,脚锭就会挡住限位板上的光线,光传感器感觉到光度的变化,就会开启转运机械手的工作,同时停止驱动装置驱动传动链工作,待转运机械手工作结束后,运输带会向前输送脚锭和铝锭,限位板上的光线恢复,光传感器就关停转运机械手,启动驱动装置驱动传动链继续工作。
14.本实用新型的进一步设置为:所述输送台上转动连接多个并排的传送滚轮。
15.通过采用上述技术方案,利用传送滚轮,减小脚锭和输送台之间的摩擦,保证脚锭稳定输送进运输带上。
16.本实用新型的有益效果是:
17.1.通过脚锭输送装置,将码垛在上料框内的两个脚锭,按照一定间距输送到机械手跟前的运输带上,再由机械手进行摆放铝锭的工作,不仅减少了人工在机械手跟前的运输带上放置脚锭的过程,而且输送脚锭的速度也高于人力放置脚锭的速度,进而缩减了运输带上脚锭的时间,提高了机械手的工作效率。
18.2.通过传动链上下两对的推动板,实现了推动板一和推动板二在输送脚锭过程中,推动板三和推动板四会移动到上料框前方,等待后续脚锭输送工作,以此形成输送工作的循环,提高脚锭输送装置的输送效率。
19.3.通过光传感器控制转运机械手和驱动装置,不仅简单的实现了铝锭摆放的工序,而且还能保证各个机械能够有序的启停,减少不必要的能耗。
附图说明
20.为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
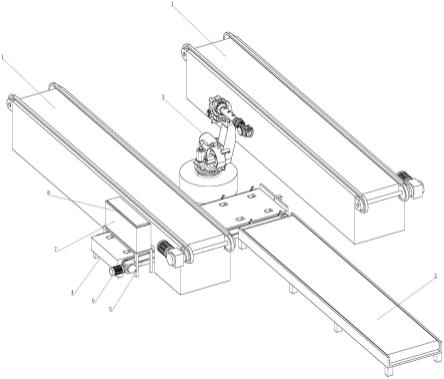
21.图1是本实施例立体结构示意图;
22.图2是本实施例脚锭输送装置结构示意图;
23.图中,1、生产输送带;2、运输带;3、转运机械手;4、脚锭输送装置;41、输送台; 42、传送滚轮;43、限位板;431、光传感器;5、传动链;51、链轮;511、传动杆;52、链条;521、推动板一;522、推动板二;523、推动板三;524、推动板四;6、驱动装置;61、电机;62、蜗轮蜗杆减速器;7、上料框;71、出口;8、脚锭。
具体实施方式
24.下面将结合具体实施例对本实用新型的技术方案进行清楚、完整地描述。显然,所描述的实施例仅仅是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
25.实施例:一种铝锭自动摆放装置,如图1、图2所示,包括两条并列的生产输送带1、一条运输带2、转运机械手3,运输带2和转运机械手3位于生产传送带之间,转运机械手3位于运输带2的一端,生产输送带1下方设有垂直于运输带2的脚锭8输送装置4,脚锭8输送装置4位于转运机械手3和运输带2之间,脚锭8输送装置4包括固定在所述生产输送带 1下方的输送台41,输送台41的两侧分别设有传动链5,输送台41上设有驱动传动链5的驱动装置6,传动链5上固定设有一对保持间距推动板一521和推动板二522,输送台41远离运输带2的一端固定设有上料框7,上料框7内叠放装有多个脚锭8,传动链5位于上料框7和输送台41之间,上料框7上开设有推动板一521和推动板二522能推动脚锭8并通过出口71,当生产输送带1输送铝锭过来时,启动驱动装置6驱动传动链5,上料框7最底部脚锭8,会被输送台41两侧传动链5上的推动板一521,推出上料框7的出口71,与此同时上料框7内的脚锭8则会依次下降,推动板一521后方的推动板二522就将第二个脚锭8推出出口71,且前后脚锭8的距离和推动板一521和推动板二522的间距一致,待两者共同将两个脚锭8输送到转运机械手3和运输带2之间时,驱动装置6停止驱动传动链5,转运机械手3开始工作,将生产输送带1上的铝锭,依次叠放在运输带2上的脚锭8上,直至叠放到设定好的高度,转运机械手3就将脚锭8和铝锭一同推到运输带2的一端运输离开,再次启动驱动装置6驱动传动链5,推动板一521和推动板二522就会经过移动台下方绕回到输送台41的上料框7前,进行脚锭8后续输送的工作。
26.其中,传动链5固定设有一对保持间距的推动板三523和推动板四524,推动板三523 和推动板四524的间距与推动板一521和推动板二522的间距相同,且分别位于传动链5的两侧,推动板三523和推动板四524能够在推动板一521和推动板二522推完返回前,提前移动到上料框7的前方,等待输送脚锭8的工作,从而节省了推动板一521和推动板二522 返程时所需的时间,两者不断交替工作,提高脚锭8输送装置4的效率。
27.如图2所示,驱动装置6包括电机61,电机61的输送端固定连接有蜗轮蜗杆减速器62,传动链5包一对链轮51,链轮51上套有链条52,推动板一521、推动板二522、推动板三 523、推动板四524分别固定连接链条52,输送台41的两端转动连接有传动杆511,传动杆的两端固定插接链轮51,蜗轮蜗杆减速器62输出端固定连接传动杆511,当电机61传动蜗轮蜗杆减速器62时,蜗轮蜗杆减速器62传动传动杆511和链轮51转动,链轮51转动就带动链条52
上的推动板一521、推动板二522、推动板三523、推动板一521输送脚锭8,其中利用一个传动杆511,能同时驱动输送台41的两侧传动链5,保持两者的同步输送,而蜗轮蜗杆减速器62,能降低电机61输出的转速和扭矩,保证输送的稳定。
28.输送台41位于转运机械手3和运输带2之间的一端固定设有限位板43,限位板43上固定设有光传感器431,光传感器431控制转运机械手3和驱动装置6的启停,当脚锭8输送到转运机械手3和运输带2之间时,脚锭8就会挡住限位板43上的光线,光传感器431感觉到光度的变化,就会开启转运机械手3的工作,同时停止驱动装置6驱动传动链5工作,待转运机械手3工作结束后,运输带2会向前输送脚锭8和铝锭,限位板43上的光线恢复,光传感器431就关停转运机械手3,启动驱动装置6驱动传动链5继续工作;输送台41上转动连接多个并排的传送滚轮42,通过传送滚轮42,减小脚锭8和输送台41之间的摩擦,保证脚锭8稳定输送进运输带2上。
29.本实施例的工作原理如下:
30.当启动驱动装置6驱动传动链5时,推动板一521和推动板二522会依次将上料框7内脚锭8在推出出口71,并将两个脚锭8以保持一定距离输送到转运机械手3跟前,此时输送台41上的光传感器43122感应到脚锭8过来,就会关闭驱动装置6并启动转运机械手3工作,将其两侧的生产输送带1的铝锭叠放在脚锭8上,待叠放好后,转运机械手3就将铝锭和脚锭8推到运输带2上,再由运输带2输送离开,光传感器431感应到脚锭8被输送离开,就会停止转运机械手3并开启驱动装置6,驱动推动板一521和推到板二从输送台41下方绕回到初始的位置,与此同时推动板三523和推动板四524,在推动板一521和推到板二上一次输送过程中,已经提前来到上料框7前,进行第二轮的输送脚锭8工作,相较于人工搬运和放置脚锭8到转运机械手3跟前,该机械装置输送速度不仅比人工输送脚锭8快,而且其反应速度也优于人工,进而极大的提高了转运机械手3的工作效率。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
