1.本技术涉及一种向烙铁头喷气来清除附着在烙铁的烙铁头上的焊渣的烙铁头清洁装置。更具体地说,涉及一种顺畅地排出所喷射的空气的烙铁头清洁装置。
背景技术:
2.在向烙铁头喷气来清除附着在烙铁的烙铁头上的焊渣的烙铁头清洁装置中,需要顺畅地排出喷射在烙铁头上的空气。在未设置空气的排出构件的情况下,当结束焊渣的去除而停止空气喷射并将烙铁头从清洁装置抽出时,混入有焊渣的空气从烙铁头插入口喷出。这是由于,烙铁头插入口不得不作为空气的出口。
3.专利文献1记载了一种向烙铁头喷气来清除附着在烙铁的烙铁头上的焊渣且设置有空气的出口的烙铁头清洁装置。在此,专利文献1的说明书[0023]中记载了仅设置一个气源且能够共用为第1气源和第2气源的内容,但并没有记载作为本技术的发明的特征之一的空气供给采用一个系统即可的内容,以下进行说明。在专利文献1所记载的烙铁头清洁装置中,第1气源供给用于清洁烙铁头的空气,第2气源供给用于空气排出的空气。另外,分别设置有用于空气供给的切换阀,而由于第1气源与第2气源的使用压力不同,因此每个气源还需要切换阀,气源及切换阀各自有两个。专利文献1的说明书[0023]所记载的第1气源与第2气源的共用是能够在装置的外部使空气分成两路并分开输入到第1气源和第2气源。另外,在专利文献1所记载的烙铁头清洁装置中,具备两个气源和设置于各个气源的切换阀,因此结构较复杂,这点也与本技术发明不同。
[0004]
现有技术文献
[0005]
专利文献
[0006]
专利文献1:日本特开2004-276081号公报
技术实现要素:
[0007]
发明要解决的课题
[0008]
本发明的课题在于,提供一种向烙铁头喷气来清除附着在烙铁的烙铁头上的焊渣的烙铁头清洁装置,并且,由于能够顺畅地排出喷在烙铁头上的空气且能够从一个供给源供给这样的空气,因此提供一种结构简单的装置。进而,课题在于,由于结构简单,提供一种制造容易且成本低廉的装置。
[0009]
用于解决课题的方案
[0010]
(1)一种烙铁的烙铁头清洁装置,其特征在于,具备:烙铁头收容部,收容烙铁的烙铁头的插入;清洁部,通过空气的喷射来剥离附着在烙铁的烙铁头上的焊渣;空气供给部,将喷射的空气供给到所述清洁部;排气部,对喷射在烙铁上的空气进行排气;以及壳体,喷射在烙铁上的空气在其内部朝向所述排气部流动,在所述排气部中,在将喷射到烙铁上的空气排出的开口即第一开口之外还设置有源自空气供给口的管子的开口即第二开口,从第二开口喷射的气流促进来自第一开口的空气的排出,向将喷射的空气供给到所述清洁部的
所述空气供给部供给的空气与从所述第二开口喷射的空气从共同的一个空气供给口供给,由此解决课题。
[0011]
(2)在烙铁的烙铁头清洁装置中,其特征在于,所述第一开口配置在围绕第二开口的位置,由此解决课题。
[0012]
(3)在烙铁的烙铁头清洁装置中,其特征在于,在所述烙铁头收容部配置有环状的铜线,且设置有对由于烙铁头接近所述环状的铜线而产生的静电电容的变化进行探测并以探测到的情况为信号来开始空气的喷射的机构,由此解决课题。
[0013]
(4)在烙铁的烙铁头清洁装置中,其特征在于,所述烙铁头收容部在相对于竖直方向倾斜的方向上开口以使所述烙铁头收容部进入对烙铁头进行清洁的作业者的视野中,由此解决课题。
[0014]
(5)在烙铁的烙铁头清洁装置中,其特征在于,所述烙铁头收容部在竖直方向上开口以收容沿竖直方向下降的烙铁头,由此解决课题。
[0015]
发明效果
[0016]
能够获得向烙铁头喷气来清除附着在烙铁的烙铁头上的焊渣的烙铁头清洁装置,并且,由于能够将喷在烙铁头上的空气顺畅地排出且能够从一个供给源供给这样的空气,能够获得结构简单的装置。进而,由于结构简单,能够获得制造容易且成本低廉即可实现的装置。
附图说明
[0017]
图1(1)示出本技术实施例1。图1(2)示出本技术实施例3。
[0018]
图2示出本技术实施例1。
[0019]
图3示出本技术实施例1。
[0020]
图4示出本技术实施例1。
[0021]
图5示出本技术实施例1。
[0022]
图6示出本技术实施例2。
23.图7示出以往例。
[0024]
附图标号说明
[0025]
10 烙铁
[0026]
15 烙铁头插入口
[0027]
20 烙铁头清洁装置
[0028]
21 清洁罐
[0029]
22 隔板
[0030]
23 后室
[0031]
24 前室
[0032]
25 废渣箱
[0033]
26 控制基板
[0034]
27 空气供给口
[0035]
28 排气口
[0036]
29a 排气口的外侧入口
[0037]
29b 排气口的内侧出口
[0038]
29c 排气口的集合出口
[0039]
30 电磁阀
[0040]
31 接头
[0041]
40 烙铁头清洁装置
[0042]
45 烙铁头插入口
[0043]
47 空气供给口
[0044]
50 锁扣
[0045]
60 环状铜线
[0046]
100 烙铁用烙铁头净化装置
[0047]
101 吸入软管连接口
[0048]
102 托盘
[0049]
103 空气喷嘴
[0050]
110 烙铁
具体实施方式
[0051]
[本技术发明的全部实施例的概要]
[0052]
实施例1是将烙铁头从斜上方插入清洁装置的例子,主要是设想在以手工作业进行钎焊的情况下使用。实施例2是将烙铁头从正上方插入清洁装置的例子,主要是设想在机器人进行钎焊的情况下使用。实施例3是涉及探测烙铁头是否插入到清洁装置的烙铁插入口中的机构、与实施例1所示的机构不同的例子,也能够适用于实施例1和实施例2中的任一个清洁装置。以下,分别各实施例进行说明。
[0053]
[实施例1]
[0054]
通过图1(1)、图2、图3、图4及图5来说明实施例1。图1(1)是从外部观察到正在使用烙铁头清洁装置20的状态的图。图2概要性地示出构成清洁装置的构件的位置。构成清洁装置的构件到处由供空气流动的管子连接,而在图2、图3及图4中均为了易于理解而省略了管子。图3中以虚线箭头示出流过管子的空气。图4中以实线箭头示出流过清洁装置内的空间的空气。
[0055]
如图1(1)所示,烙铁头清洁装置20在前表面具备烙铁头插入口15。当对烙铁头进行清洁时,将烙铁10的烙铁头插入烙铁头清洁装置20的烙铁头插入口15。
[0056]
如图2所示,烙铁头插入口15经由控制基板26与清洁罐21连接。清洁罐21例如是如日本特愿2019-45579所记载的结构。即,清洁罐21例如在内部具备清洁室,从烙铁头插入口插入的烙铁头进入该清洁室。利用从设置在清洁室的壁面上的喷射口喷射的空气吹掉烙铁头的焊渣。在清洁罐21的下方设置有收容从烙铁头剥离吹掉而下落的焊渣的废渣箱25。废渣箱25为抽屉式,能够朝向外部(例如朝向前方)拉出并将积存的焊渣丢弃。
[0057]
烙铁头清洁装置20在内部具备对烙铁头清洁装置的壳体进行分隔的隔板22。烙铁头清洁装置的内部由隔板22分成比隔板靠前方的前室24和比隔板靠后方的后室23。隔板22并未将烙铁头清洁装置20的内部完全地截断,在与壳体之间的上方及侧方具备对于使空气顺畅地流动到后室23来说足够的空间。这是由于,在后室23设置有如后所述用于将空气排
出到外部的机构,而如果空气无法顺畅地流动到后室23,则会妨碍空气向外部的排出。
[0058]
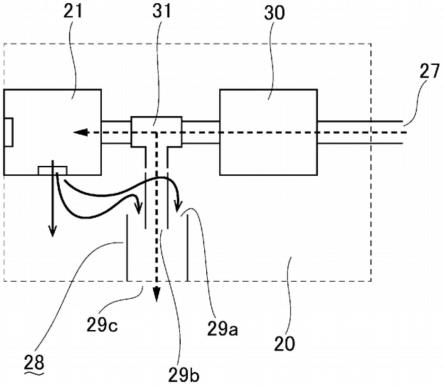
在后室23设置有用于向烙铁头清洁装置供给空气的空气供给口27、对供所供给的空气流动的管子的开闭进行控制的电磁阀30、将沿管子流动的方向分成两个方向的接头31以及向外部排出空气的排气口28。
[0059]
通过图3、图4及图5来说明实施例1的清洁装置的动作。
[0060]
如上所述,在图3、图4及图5中,省略了连接各构件的管子。图3中以虚线箭头示出在管子中流动的气流。即,从空气供给口27进入到清洁装置20的内部的空气伴随着较大的压力依次流过空气供给口27、管子、电磁阀30、管子、接头31、管子、清洁罐21,并在清洁罐21中喷射到烙铁的烙铁头上。
[0061]
在烙铁插入口附近的以标号13(图1(1))示出的位置设置有现有的透射型传感器。在将烙铁10的烙铁头插入烙铁插入口15时,透射型传感器探测到插入了烙铁头的情况,使送风的开关接通,开始送风。即,在透射型传感器检测到烙铁的插入时,空气以较强的气流从空气供给口27朝向清洁罐21供给。在清洁罐21中,空气从设置在内部的清洁室的壁面上的喷射口喷射而吹掉烙铁头的焊渣。
[0062]
图4中涉及各构件未由管子连接而使空气流过烙铁头清洁装置20的壳体内的空间的结构,且以实线箭头示出气流。
[0063]
空气呈螺旋状流过清洁罐21内并朝向烙铁头喷射。
[0064]
在清洁罐21内结束了清洁烙铁的烙铁头的空气如图4的实线箭头所示朝向烙铁头清洁装置20的壳体内的废渣箱25流动,大部分的焊渣下落到废渣箱25中。空气避开壳体内的隔板22而流过壳体的上方和侧方并进入后室23。从清洁罐21喷出的空气碰撞到隔板22而朝向下方流动。由此,混在空气中的焊渣被导入废渣箱25,不会大范围地飞散到烙铁头清洁装置20的整个内部。
[0065]
使用图3至图5来主要说明涉及后室的气流。如图5中以虚线箭头所示,从空气供给口27进入到清洁装置20的空气经由管子流动到接头31,在接头31中分支成清洁罐21的方向和排气口28(的内侧出口29b)的方向这两个方向。
[0066]
如图5示意性所示,排气口28在排气口的集合出口29c之外还具备排气口的内侧出口29b。另外,排气口28具备收容来自壳体内的空间的空气的排气口的外侧入口29a。关于排气口的外侧入口29a、内侧出口29b及集合出口29c,也参照图3和图4。
[0067]
从排气口的内侧出口29b流出的空气接着朝向排气口的集合出口29c流动并直接排出。此时,在排气口28的内部从内侧出口29b朝向集合出口29c形成气流。在此形成的气流使得烙铁头清洁装置20的壳体内的空气从29a朝向排气口28流动的气流产生。其结果是,结束了清洁烙铁的烙铁头的空气、如图4的实线箭头所示避开烙铁头清洁装置20的壳体内的隔板22而流过壳体上方等并流入到后室23的空气穿过排气口的外侧入口29a进入排气口,并从排气口集合出口29c排出。本来,流入到后室23的空气在烙铁头清洁装置的壳体内流动以寻求出口,因此,只要稍微产生气流,就易于借该气流而流出。
[0068]
[实施例2]
[0069]
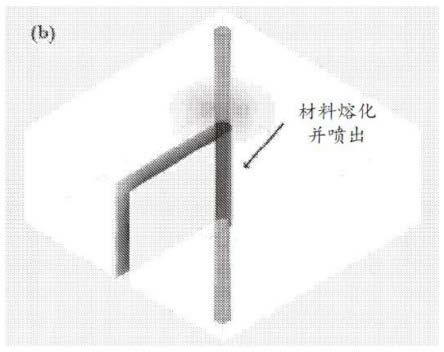
通过图6来说明实施例2。在烙铁头清洁装置40中,烙铁头插入口45在烙铁头清洁装置的顶面上朝向竖直方向开口。在钎焊装置为机器人的情况下,烙铁头朝向竖直方向上下进行钎焊的情形较多,因此,使清洁焊渣时的烙铁的动作与进行钎焊时的移动同样地沿
上下方向来进行。其他机构与实施例1相同,因此省略。
[0070]
[实施例3]
[0071]
通过图1(2)来说明实施例3。在实施例3中,使用静电电容式的接近传感器来作为探测烙铁的烙铁头插入到烙铁插入口15的情况的机构。具体地说,在烙铁头插入口中,在围绕插入口的位置环绕设置铜线。铜线只要是环绕烙铁头插入口的位置则可以设置于任意位置,但在图1(2)中设置于控制基板26。设置于控制基板的环状的铜线从外部无法观察到,因此在图1(b)中以虚线示出环状铜线60存在的位置。当烙铁的烙铁头接近烙铁头插入口时,捕捉到静电电容的变化,经由设置于控制基板26的电路(未图示)来使送风的开关接通,开始送风。通过设为静电电容式,针对使开关接通或者无反应,能够进行灵敏度调节。由此,能够调节为,在烙铁头程度大小的物体的情况下产生反应,但在比烙铁头小的物体、例如附着有异物这种程度的情况下送风的开关不会接通。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。