1.本发明涉及一种用于推进和操纵微结构(例如诸如支架或导管之类的移动柔性管)或微型机器人的设备,该设备旨在在流体中、尤其是在受试者的血管(诸如动脉或静脉)中或者在受试者的器官(诸如大脑、心脏、肝脏、胰腺等)中移动。尤其是在微创手术或靶向治疗的情况下,移动柔性管或微型机器人可用于执行各种生物医学操作。
背景技术:
2.在不造成任何损伤的情况下能够到达深部和功能性结构是微创手术中(尤其是在神经外科中)的主要挑战。由于微技术,将完全自主的微型医疗设备发送到受试者的血管或器官内已成为可能。尽管如此,这种微型医疗设备需要一种系统,该系统即使在异质和敏感的环境中也能够实现其在三个维度上以至少等同于设备尺寸的精度的推进和操纵。
3.在该背景下,本发明的目的在于提供一种用于推进和操纵诸如柔性管或微型机器人之类的微结构的设备,该设备确保微结构的有效和可靠推进和操纵(包括在具有低雷诺数的流体环境中),具有至少等同于微结构尺寸的精度,同时尽可能保持微结构在其中移动的环境的完整性。
技术实现要素:
4.为此,本发明的一个目的是一种用于推进和操纵诸如柔性管或微型机器人之类的微结构的设备,该设备包括:
[0005]-推进元件,其包括能够沿主轴线伸长/收缩形变的、连接推进元件的前部分和后部分的至少一个部分;
[0006]-至少两个引导元件,其适于在通过与能源的相应连接件的能量供应的作用下引起推进元件分别围绕第一旋转轴线和第二旋转轴线的旋转,该第一旋转轴线和该第二旋转轴线横向于彼此并且横向于推进元件的主轴线;
[0007]-控制单元,其被配置为通过选择性地控制与能源的连接件中的一个或更多个来以与推进元件的可形变部分的沿主轴线伸长/收缩形变相配合的方式致动推进元件围绕横向于主轴线的至少一个轴线的旋转,引导元件还包括基于活性材料的至少两个引导段,这些引导段能够在通过与能源的相应连接件的能量供应的作用下可逆地形变,每个引导段适于通过其形变在能量供应的作用下引起推进元件围绕横向于推进元件的主轴线的旋转轴线的旋转。
[0008]
根据本发明的推进和操纵设备允许在三个维度上操纵微结构,这是由于以与通过推进元件的可形变部分的形变获得的微结构的推进相配合的方式致动推进元件围绕至少两个旋转轴线的旋转的可能性,这些旋转轴线横向于彼此并且横向于主轴线。在本发明的背景下,两个轴线在它们不平行时横向于彼此,这包括但不限于两个轴线彼此垂直的情况。
[0009]
在本发明的背景下,旋转的致动以尤其是同时或按顺序地以与推进元件的可形变部分的形变相配合的方式执行,以便获得微结构在环境中的期望的移动和轨迹,微结构在
该环境内移动,该环境尤其是具有低雷诺数的流体环境。更具体地,旋转的致动可以与推进元件的可形变部分的形变同时执行,或者与推进元件的可形变部分的形变按顺序地执行,即使得旋转和形变尤其是以重复的方式一个接一个地进行。
[0010]
在本发明的背景下,设有根据本发明的推进和操纵设备的微结构通常具有小于或等于5mm、尤其是小于或等于2mm或1mm的外径。
[0011]
根据一个特征,推进元件至少包括第一引导段和第二引导段,使得第一引导段的形变引起推进元件围绕垂直于推进元件主轴线的第一旋转轴线的旋转,并且第二引导段的形变引起推进元件围绕垂直于推进元件的主轴线和第一旋转轴线二者的第二旋转轴线的旋转。
[0012]
根据引导段的一个实施例,该段是推进元件的可形变部分涂有活性材料的区域。根据引导段的另一个实施例,该段是包括设有活性材料的支撑件的段,该活性材料附接在推进元件的可形变部分上。
[0013]
根据一个实施例,推进元件的可形变部分由杨氏模量为0.1至10gpa、优选0.5至2gpa的材料制成。在一个实施例中,推进元件的前部分、后部分和可形变部分均由相同的材料制成。在一个实施例中,前部分、后部分和可形变部分的构成材料是生物相容性聚合物。用于前部分、后部分和/或可形变部分的合适材料的示例是可uv固化的混合无机-有机聚合物,诸如由micro resist technology gmbh公司制造的产品ormoclear。
[0014]
在一个实施例中,至少一个引导段包括电活性材料或双金属元件,推进和操纵设备包括电能源,该电能源连接到引导段以便激活其形变。尤其是,能源是通过电线或电缆连接到引导段的电活性材料或双金属元件的电源。
[0015]
在本发明的背景下,电活性材料是在电能供应的作用下形变、尤其是通过改变其形状或尺寸而形变的材料。在本发明的背景下,合适的电活性材料的示例包括形状记忆合金(诸如镍钛诺);或电活性聚合物(eap),尤其是介电电活性聚合物和离子电活性聚合物。作为一个非限制性示例,可用于本发明的背景下的离子电活性聚合物是聚(3,4-亚乙基二氧噻吩)(pedot)。
[0016]
在本发明的背景下,双金属元件是包括两种材料的元件,这两种材料在尤其通过当材料导电时电流能够产生的热供应的作用下,根据不同的机械特性单独弹性形变,这通过这两种材料的固体接触引起了双金属元件的非常显著的形变。这种双金属元件可以尤其通过共同轧制两个金属条来形成。在本发明的背景下,合适的双金属元件的例子是铜和钢双金属,或铁和镍双金属,因为这些双金属是结合了具有完全不同的热膨胀系数的金属材料的双金属。
[0017]
在一个实施例中,至少一个引导段包括光活性材料,推进和操纵设备包括辐射源,该辐射源的辐射在引导段的对面发射以便激活其形变。尤其是,辐射源是激光源或led(发光二极管),使用光纤将其辐射向上传输到引导段的光活性材料,该光纤具有与引导段的光活性材料相对定位的远端部。
[0018]
在本发明的背景下,光活性材料是在辐射作用下、尤其是在光能供应的作用下形变的材料。在本发明的背景下,合适的光活性材料的示例包括包含偶氮苯分子的液晶网络。辐射源则可以是包括可见光谱的所有波长的白光源。作为一个非限制性示例,可用于本发明的背景下的光活性材料是基于双光敏液晶的致动器,该双光敏液晶尤其包含通过酸处理
局部转化为羟基偶氮吡啶(hydroxyazopyridinium)形式的偶氮花青染料。
[0019]
根据一个特征,所述引导段中的至少两个引导段被配置为,当所述至少两个引导段同时形变时,致动推进元件的可形变部分沿主轴线的伸长/收缩形变,并且当所述至少两个引导段选择性地形变时,致动推进元件围绕横向于主轴线的旋转轴线的旋转。通过选择性地向引导段供应能量,然后可以致动推进元件的旋转和伸长/收缩形变,这允许确保微结构的方向操纵和推进。
[0020]
根据一个特征,引导段围绕推进元件的主轴线各向同性地分布。这导致对推进元件的方向操纵的改进控制。
[0021]
根据一个实施例,推进元件的可形变部分包括唯一的柔性支腿,该柔性支腿围绕主轴线被螺旋地设置在推进元件的前部分与后部分之间,柔性支腿包括至少两个引导段,这两个引导段沿柔性支腿分布并且被配置为通过其形变引起推进元件分别围绕第一旋转轴线和第二旋转轴线的旋转,该第一旋转轴线和该第二旋转轴线横向于彼此并且横向于推进元件的主轴线。
[0022]
根据另一个实施例,推进元件的可形变部分包括至少两个柔性支腿,这些柔性支腿围绕主轴线被螺旋地设置在推进元件的前部分与后部分之间,推进和操纵设备包括分别在第一柔性支腿和第二柔性支腿上的至少一对引导段,该至少一对引导段被配置为通过其形变引起推进元件分别围绕第一旋转轴线和第二旋转轴线的旋转,该第一旋转轴线和该第二旋转轴线横向于彼此并且横向于推进元件的主轴线。
[0023]
根据本发明的一个方面,引导元件包括至少两个电磁引导线圈,这些电磁引导线圈各自设有与电能源的相应连接件并且与固定到推进元件的磁体形成电磁换能器,磁体在息止位置基本平行于推进元件的主轴线,每个引导线圈适于在电能供应的作用下引起磁体相对于其息止位置的旋转,从而导致推进元件围绕横向于推进元件的主轴线的旋转轴线的旋转。
[0024]
根据一个特征,对于包括固定到推进元件的磁体和引导线圈的每个电磁换能器来说,磁体插入引导线圈内以用于致动推进元件的旋转。这种布置确保了电磁转换效率,从而允许通过作用于每个引导线圈的电连接件来可靠且准确地控制推进元件的旋转。当然,磁体的极性和每个引导线圈的电源相适配,以便获得推进元件的期望旋转。
[0025]
根据一个实施例,推进和操纵设备还包括线性致动电磁线圈,该线性致动电磁线圈设有与电能源的相应连接件,并且也与固定到推进元件的磁体形成电磁换能器,线性致动线圈适于在电能供应的作用下引起磁体平行于主轴线的平移,从而导致推进元件的可形变部分沿主轴线的伸长/收缩形变。通过选择性地为引导线圈和线性致动线圈供电,然后可以致动推进元件的旋转和伸长/收缩形变,这允许确保微结构的方向操纵和推进。
[0026]
根据另一个实施例,所述电磁引导线圈中的至少两个电磁引导线圈被配置为,当所述至少两个电磁引导线圈同时被用电能供电时,致动推进元件的可形变部分沿主轴线的伸长/收缩形变,并且当所述至少两个电磁引导线圈被选择性地供电时,引起磁体相对于其息止位置的旋转,从而导致推进元件围绕横向于主轴线的旋转轴线的旋转。通过选择性地(例如同时或连续地)为引导线圈供电,则可以致动推进元件的旋转和伸长/收缩形变,这允许确保微结构的方向操纵和推进。
[0027]
根据一个实施例,每个引导线圈的中心轴线基本平行于推进元件的主轴线。根据
另一个实施例,每个引导线圈的中心轴线基本上垂直于推进元件的主轴线。
[0028]
引导线圈的数量可以是大于或等于两个的任何数量。尤其是,以非限制性方式,在本发明的背景下可以考虑以下布置:沿推进元件的主轴线的方向前后相继地设置的两个引导线圈,其中心轴线基本平行于主轴线且不与主轴线重合;并排设置的两个引导件,其中心轴线基本平行于推进元件的主轴线;沿推进元件的主轴线的方向前后相继地设置的至少三个引导线圈、尤其是三个、四个、五个或六个引导线圈,其中心轴线基本平行于主轴线且不与主轴线重合;围绕推进元件的主轴线分布的至少三个引导线圈、尤其是三个、四个、五个或六个引导线圈,其中心轴线基本平行于推进元件的主轴;围绕推进元件的主轴线分布的至少三个引导线圈、尤其是三个、四个、五个或六个引导线圈,其中心轴线基本上垂直于推进元件的主轴线。
[0029]
根据一个特征,控制单元还被配置为致动推进元件的可形变部分沿主轴线的伸长/收缩形变。因此,可以使推进元件的旋转的致动和推进元件的伸长/收缩形变的致动最佳地配合。
[0030]
根据一个特征,推进和操纵设备包括线性致动器,该线性致动器被配置为致动推进元件的可形变部分沿主轴线的伸长/收缩形变。根据一个实施例,线性致动器包括电磁换能器,该电磁换能器包括固定到可形变部分的一个端部的电磁线圈和固定到可形变部分的另一个端部的永磁体的组合。根据一个实施例,线性致动器包括泵。该实施例适用于推进元件的可形变部分可以在其内部空间中包含流体的情况,尤其是适用于可形变部分具有形成连续外周壁的包络的情况。在一个实施例中,推进元件的可形变部分包括波纹管并且致动器包括泵。
[0031]
在一个实施例中,推进和操纵设备包括固定到推进元件的前部分的至少一个推进纤毛,推进纤毛的一个端部固定到前部分,而推进纤毛的另一个端部是配置为自由端部,所述自由端部自由移动以便引起微结构尤其是在具有10-5
至10-1
的低雷诺数的流体中的非往复运动。由于这种纤毛的存在,即使在粘性或粘弹性材料中,尤其是在受试者的器官(诸如大脑)中,也获得了微结构的推进运动。推进元件的可形变部分的连续伸长/收缩循环导致推进纤毛在粘性或粘弹性材料中的移动,从而由于推进纤毛与粘性或粘弹性材料的相互作用而引起净推进力。
[0032]
根据一个特征,对于推进元件的可形变部分沿其主轴线的每个伸长/收缩形变循环,在推进元件的收缩阶段中的推进纤毛或每个推进纤毛的自由端部在具有10-5
至10-1
的低雷诺数的流体中的路径与在推进元件的伸长阶段中的推进纤毛或每个推进纤毛的自由端部在所述流体中的路径不同。推进纤毛相对于可形变部分的伸长和收缩阶段的这种实施允许获得微结构的非往复运动,这允许在具有低雷诺数的流体中有效地移动。
[0033]
尤其是,在非限制性实施例中,一个或多个推进纤毛的自由端部在粘性或粘弹性材料中的路径在拓扑上等效于可形变部分的每个伸长/收缩循环的椭圆路径或圆形路径。应当注意的是,自由端部在拓扑上等效于线段的路径不适用于获得微结构的非往复运动,即使沿路径应用不同的动力学也是如此。
[0034]
根据一个实施例,推进元件的后部分包括至少一个推进纤毛。在本发明的背景下,应当理解,仅在推进元件的前部分存在推进纤毛就足够了。然而,在后部分上也设有推进纤毛的布置可以有助于微结构在粘性或粘弹性材料中的推进。根据一个实施例,当推进元件
的后部分在其表面处包括至少一个推进纤毛时,后部分的推进纤毛或每个推进纤毛可以与推进元件的前部分的一个或多个推进纤毛相同或不同。
[0035]
根据一个实施例,推进元件的前部分和/或后部分的推进纤毛或每个推进纤毛由杨氏模量为0.1至10gpa、优选0.5至2gpa的材料制成。根据一个实施例,推进纤毛或每个推进纤毛由与推进元件的可形变部分相同的材料制成。在一个实施例中,推进纤毛的材料是生物相容性聚合物。适用于推进纤毛的材料的示例包括聚二甲基硅氧烷(pdms)、硅、或可uv固化混合无机-有机聚合物(诸如ormoclear)。
[0036]
根据一个实施例,至少两个引导元件径向定位在可形变部分之外。
[0037]
根据一个实施例,可形变部分包括设置在前部分与后部分之间的振荡盘,至少两个引导元件被设置在后部分与振荡盘之间。
[0038]
根据一个实施例,推进和操纵设备包括前后相继地设置的至少两个推进元件,控制单元被配置为根据预定义的时间顺序致动推进元件沿其主轴线的伸长/收缩形变循环,以便引起微结构尤其是在具有10-5
至10-1
的低雷诺数的流体中的非往复运动。这种布置是获得微结构非往复运动的另一种方式,从而允许在具有低雷诺数的流体中有效地移动。这种布置可以单独使用或与至少一个推进纤毛组合使用以引起如上所述的非往复运动。
[0039]
本发明的另一个目的是一种包括如上所述的推进和操纵设备的微结构。根据本发明的一个方面,微结构被配置为在具有低雷诺数的流体材料中移动,尤其是在雷诺数re为10-5
至10-1
的流体材料中移动。以已知的方式,雷诺数re是一个无量纲量,其量化了给定流动条件下惯性力和粘性力的相对大小。雷诺数re可以表示为流体中的惯性力与粘性力的比率:其中u是流体相对于物体的平均速度,l是特征线性维度,ν是流体的运动粘度。
[0040]
本发明的另一个目的是一种用于推进和操纵诸如柔性管或微型机器人之类的微结构的方法,该微结构包括如上文所述的推进和操纵设备,该方法包括以下步骤:
[0041]-将包括推进和操纵设备的微结构引入具有尤其为10-5
至10-1
的低雷诺数的流体中;
[0042]-通过使用控制单元选择性地控制与能源的连接件中一个或更多个,以与推进元件的可形变部分沿主轴线的伸长/收缩形变相配合的方式致动推进元件围绕横向于推进元件的主轴线的至少一个轴线的旋转。
附图说明
[0043]
本发明的特征和优点将出现在以下对根据本发明的用于推进和操纵微结构的设备和方法的几个实施例的描述中,这些实施例仅作为示例提供并参照附图进行,其中:
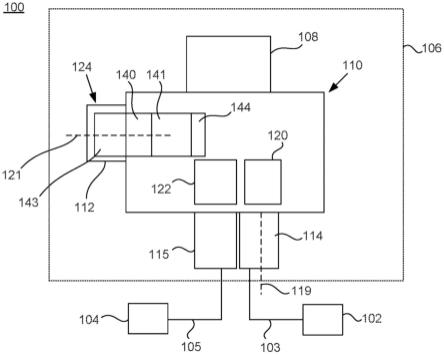
[0044]-图1是包括根据本发明第一实施例的推进和操纵设备的微型机器人的示意性截面,该推进和操纵设备具有呈螺旋弹簧形式的推进元件,该螺旋弹簧具有三个柔性支腿,每个柔性支腿包括基于电活性材料的引导段,该引导段设有相应的电连接件;
[0045]-图2是类似于图1的截面,示出了微型机器人的旋转运动的激活;
[0046]-图3是图1和图2的微型机器人的推进元件的放大局部立体图;
[0047]-图4是类似于图2的包括根据本发明第二实施例的推进和操纵设备的微型机器人的截面,该推进和操纵设备具有呈螺旋弹簧形式的推进元件,该螺旋弹簧具有三个柔性支腿,每个柔性支腿包括引导段,该引导段基于与传输相应辐射的光纤相关联的光活性材料;
[0048]-图5是类似于图2的包括根据本发明第三实施例的推进和操纵设备的微型机器人的截面,该推进和操纵设备具有呈螺旋弹簧形式的推进元件,该螺旋弹簧具有两个柔性支腿,每个柔性支腿包括基于电活性材料的多个引导段,其中每个柔性支腿的每个引导段都设有相应的电连接件,以便能够由电源独立供电;
[0049]-图6是类似于图2的包括根据本发明第四实施例的推进和操纵设备的微型机器人的截面,该推进和操纵设备具有呈螺旋弹簧形式的推进元件,该螺旋弹簧具有唯一的柔性支腿,该柔性支腿包括基于电活性材料的多个引导段,其中柔性支腿的每个引导段都设有相应的电连接件,以便能够由电源独立供电;
[0050]-图7是类似于图2的包括根据本发明第五实施例的推进和操纵设备的微型机器人的截面,该推进和操纵设备具有前后相继地设置的两个推进元件,控制单元被配置为根据预定义的时间顺序致动推进元件沿其主轴线的伸长/收缩形变循环,以便引起微结构的非往复运动;
[0051]-图8是类似于图1的包括根据本发明第六实施例的推进和操纵设备的微型机器人的截面,该推进和操纵设备具有呈螺旋弹簧形式的推进元件,该螺旋弹簧具有三个柔性支腿以及具有三个线圈的电磁换能器,这些线圈包括线性致动线圈和两个旋转引导线圈,这些线圈各自设有相应的电连接件;
[0052]-图9是类似于图8的截面,示出了微型机器人的旋转运动的激活;
[0053]-图10是图8和图9的微型机器人的推进元件的一部分的放大立体图;
[0054]-图11是类似于图10的包括根据本发明第七实施例的推进和操纵设备的微型机器人的推进元件的一部分的立体图;
[0055]-图12是类似于图10的包括根据本发明第八实施例的推进和操纵设备的微型机器人的推进元件的一部分的立体图;
[0056]-图13是类似于图3的包括根据本发明第九实施例的推进和操纵设备的微型机器人的推进元件的局部立体图;
[0057]-图14是类似于图13的包括根据本发明第十实施例的推进和操纵设备的微型机器人的推进元件的局部立体图;
[0058]-图15是类似于图13的包括根据本发明第十一实施例的推进和操纵设备的微型机器人的推进元件的局部立体图;
[0059]-图16是类似于图15但处于作用中的本发明相同实施例的局部立体图。
具体实施方式
[0060]
在图1至图3所示的第一实施例中,微型机器人10被配置为在粘性或粘弹性材料中(例如在受试者大脑的脑脊液或细胞外基质中)移动,对于微型机器人来说,这些材料是具有低雷诺数的流体材料。
[0061]
微型机器人10包括根据本发明的推进和操纵设备1,微型机器人的活动部分11紧固到该推进和操纵设备,该活动部分可以例如是:传感器;致动器;适于释放药物的容器;等。
[0062]
如图1和图2清楚所示,推进和操纵设备1包括推进元件2,该推进元件包括前部分21、后部分23以及连接前部分21和后部分23的可形变部分20。在该第一实施例中,可形变部
分20是可沿推进元件2的主轴线x2伸长/收缩形变的螺旋弹簧。推进元件2的主轴线x2在本文中被限定为可形变部分20的中心轴线,该中心轴线基本垂直于可形变部分20所紧固到的后部分23的远端板230的平面。
[0063]
形成可形变部分20的螺旋弹簧包括三个柔性支腿22、24、26,这些柔性支腿围绕主轴线x2被螺旋地设置在推进元件的前部分21与后部分23之间。每个柔性支腿22、24、26设有基于电活性材料(例如pedot离子电活性聚合物)的相应引导段3、5、7。三个引导段3、5、7中的每一个在电能供应的作用下都可以可逆地形变,并且通过相应的电缆83、85、87连接到电源8。
[0064]
每个引导段3、5、7适于通过其在用电能供电时的形变来引起对应的柔性支腿的形变和推进元件2的旋转。对于每个引导段3、5、7来说,由引导段的形变引起的旋转的轴线横向于推进元件的主轴线x2以及横向于由其他两个引导段中的每一个的形变引起的旋转的轴线。如图3的放大视图清楚地示出,引导段3、5、7围绕推进元件2的主轴线x2各向同性地分布,这允许优化推进元件的方向操纵。因此,在本发明中,引导段3、5、7与柔性支腿22、24、26形成确保旋转和推进的独特的多用途功能组。本发明不以各自确保不同功能的不同元件的任何耦合为特征。
[0065]
推进和操纵设备1还包括线性致动器4,该线性致动器被配置为按顺序地致动推进元件2的可形变部分20的伸长/收缩循环。致动器4是包括永磁体41和电磁线圈42的电磁换能器。磁体41在可形变部分20的前端部处紧固到推进元件2的前部分21,而线圈42安装在后部分23上,从而紧固到可形变部分20的后端部。根据施加到线圈42的电流,磁体41接近或远离线圈42,这引起可形变部分20的收缩或伸长。
[0066]
如图1和图2所示,推进元件2的前部分21在其表面包括多个推进纤毛28,这些推进纤毛被配置为与微型机器人10在其中移动的材料相互作用。由电磁换能器4致动的可形变部分20的按顺序的伸长/收缩循环引起推进纤毛28在材料中的移动,从而产生引起微型机器人10的移动的推进力。
[0067]
对于由电磁换能器4致动的可形变部分20的每个伸长/收缩循环,每个推进纤毛28被配置成使得在可形变部分20的收缩阶段中的推进纤毛28的自由端部29在粘性或粘弹性材料中的路径与在可形变部分20的伸长阶段中的自由端部29在粘性或粘弹性材料中的路径不同。有利地,推进纤毛28的自由端部29在粘性或粘弹性材料中的路径在拓扑上等效于每个伸长/收缩循环的椭圆路径或圆形路径。因此获得了微型机器人10的非往复运动,从而允许微型机器人10在具有低雷诺数的流体材料(诸如大脑的脑脊液或细胞外基质)中有效地移动。
[0068]
推进和操纵设备1还包括控制单元9,该控制单元被配置为通过选择性地控制电连接件83、85、87中的一个或更多个来致动推进元件2围绕横向于主轴线x2的至少一个轴线的旋转。控制单元9还被配置为致动可形变部分20沿主轴线x2的伸长/收缩形变。因此,可以使推进元件2的旋转的致动和可形变部分20沿主轴线x2伸长/收缩形变的致动最佳地配合,以便获得微型机器人10在材料中的期望的移动和轨迹,该微型机器人在该材料中移动。控制单元9因此致动单个元件(推进元件2),并允许通过该单个元件的致动引起设备1的推进和旋转。
[0069]
一种用于在具有尤其是10-5
至10-1
的低雷诺数的流体中推进和操纵微型机器人10
的方法,该方法包括使用控制单元9选择性地控制电连接件83、85、87中的一个或更多个来以无论是同时还是按顺序地与可形变部分20沿主轴线x2的伸长/收缩形变相配合的方式致动推进元件2围绕横向于主轴线x2的至少一个轴线旋转。
[0070]
作为一个非限制性示例,具有以下特性的微型机器人10在具有低雷诺数的流体材料中具有良好的推进和引导性能:
[0071]-微型机器人10的总长度:2mm;
[0072]-微型机器人10的直径:2mm;
[0073]-推进元件2的可形变部分20的长度:0.5mm;
[0074]-线性致动线圈42的长度:0.5mm;
[0075]-磁体41的长度:0.8mm;
[0076]-每个推进纤毛28的横截面:2500μm2。
[0077]
制造过程
[0078]
通过3d激光光刻,使用可uv固化的混合无机-有机ormoclear聚合物作为光刻胶一件式制造前部分21、后部分23和可形变部分20。将光刻胶施加在玻璃衬底上,点激光器根据3d cad设计图选择性地固化光刻胶。推进纤毛28与前部分21一件式制成,即以与前部分21相同的材料制造。通过在可形变部分20的柔性支腿22、24、26中每一个上沉积一层pedot离子电活性聚合物来获得引导段3、5、7。通过在后部分23上缠绕铜线来获得线性致动线圈42。磁体41是钕永磁体,其通过采用丙烯酸粘合剂胶合紧固在前部分21上。
[0079]
在图4所示的第二实施例中,与第一实施例的元件相似的元件具有相同的附图标记。第二实施例的微型机器人10与第一实施例的不同之处在于引导段3、5、7包括光活性材料,而不是电活性材料。对于基于光活性材料的每个引导段3、5、7来说,推进和操纵设备1包括专用辐射源,该专用辐射源的辐射被带到引导段的对面以激活其形变。作为示例,在该第二实施例中,每个引导段3、5、7的光活性材料是包括偶氮苯分子的液晶网络,并且每个引导段3、5、7的辐射源是白光源,不同的源被安置在同一个箱体8'中。
[0080]
在该第二实施例中,所有引导段3、5、7都是基于相同的光活性材料,并且为了避免可能激活与专用辐射源相关联的引导段形变之外的引导段形变的辐射相互作用,使用各自的光纤83'、85'、87'将辐射向上传输到每个引导段3、5、7的光活性材料,该光纤具有与引导段3、5、7的光活性材料相对定位的远端部。根据一个变型,引导段3、5、7可以基于不同的光活性材料,这些光活性材料适于被不同波长的辐射激活。在这种情况下,每个引导段3、5、7与在特定于其的波长范围内发射的辐射源相关联。本文再次可以使用具有与引导段的光活性材料相对定位的远端部的光纤将辐射向上传输到引导段3、5、7的光活性材料。
[0081]
在图5所示的第三实施例中,与第一实施例的元件相似的元件具有相同的附图标记。第三实施例的微型机器人10与第一实施例的不同之处在于推进元件2的可形变部分20是包括两个柔性支腿22、24(而不是像第一实施例中的三个柔性支腿)的螺旋弹簧。两个柔性支腿22、24围绕主轴线x2被螺旋地设置在推进元件的前部分21与后部分23之间,并且各自设有基于电活性材料的三个引导段,分别为31、32、33和51、52、53。对于两个柔性支腿22、24中的每一个来说,引导段31、32、33或51、52、53沿柔性支腿分布并通过相应的电线连接到电源8,柔性支腿22或24的不同引导段的所有电线在线缆83或85中穿过。
[0082]
在图6所示的第四实施例中,与第一实施例的元件相似的元件具有相同的附图标
记。第四实施例的微型机器人10与第一实施例的不同之处在于推进元件2的可形变部分20是包括唯一柔性支腿22的螺旋弹簧,该柔性支腿围绕主轴线x2被螺旋地设置在推进元件的前部分21与后部分23之间。柔性支腿22包括基于电活性材料的四个引导段31、32、33、34,这些引导段沿柔性支腿22分布并且各自通过相应的电线连接到电源8,柔性支腿22的不同引导段的所有电线在线缆83中穿过。引导段31、32、33、34被配置为通过它们的形变引起推进元件2分别围绕第一旋转轴线和第二旋转轴线的旋转,该第一旋转轴线和该第二旋转轴线横向于彼此并且横向于推进元件的主轴线x2。
[0083]
在图7所示的第五实施例中,与第一实施例的元件相似的元件具有相同的附图标记。第五实施例的微型机器人10与第一实施例的不同之处在于推进和操纵设备1包括前后相继地设置的两个推进元件21和22,控制单元9被配置为根据预定的时间顺序致动两个推进元件的可形变部分201和202的伸长/收缩形变循环,以便引起微型机器人10的非往复运动。这种布置是一种不同于推进纤毛的方式,用于实现微型机器人10的非往复运动,从而允许在具有低雷诺数的流体中有效地移动。
[0084]
在该第五实施例中,对于两个推进元件21和22中的每一个来说,可形变部分201或202与第一实施例的可形变部分20相同,即包括围绕推进元件的主轴线x
21
或x
22
螺旋设置的三个柔性支腿221、241、261或222、242、262。每个柔性支腿221、241、261或222、242、262设有相应的引导段31、51、71或32、52、72,这些引导段基于电活性材料,在电能供应的作用下可以可逆地形变,并且通过相应的电缆831、851、871或832、852、872连接到电源81或82。
[0085]
该第五实施例的推进和操纵设备1不包括类似于先前实施例的电磁换能器4的线性致动器,以按顺序地致动推进元件的可形变部分201或202的伸长/收缩循环。实际上,在该第五实施例中,对于两个推进元件21和22中的每一个来说,基于电活性材料的引导段31、51、71或32、52、72被配置为,当这些引导段同时形变时,致动可形变部分201或202沿主轴线x
21
或x
22
的伸长/收缩形变,并且当这些引导段选择性地形变时,致动推进元件21或22围绕横向于主轴线x
21
或x
22
的旋转轴线的旋转。通过选择性地向引导段31、51、71、32、52、72供应电能,可以致动每个推进元件21、22的旋转和/或伸长/收缩形变,这允许确保微型机器人10的方向操纵和推进二者。
[0086]
在图8至图10所示的第六实施例中,与第一实施例的元件相似的元件具有相同的附图标记。第六实施例的微型机器人10与第一实施例的不同之处在于引导元件包括两个电磁引导线圈43和45,而不是基于活性材料的引导段。引导线圈43和45中的每一个设有与电能源6的相应连接件63、65,并且与固定到推进元件2的前部分21的永磁体41形成电磁换能器。磁体41在息止位置中基本平行于推进元件的主轴线x2。两个引导线圈43、45中的每一个都适于在电能供应的作用下引起磁体41相对于其息止位置的旋转,这导致推进元件2围绕横向于主轴线x2的旋转轴线的旋转。
[0087]
该第六实施例的推进和操纵设备1还包括类似于先前实施例的线圈42的线性致动电磁线圈42,该电磁线圈设有与电能源6的相应连接件62并且也与磁体41形成电磁换能器。线性致动线圈42适于在电能供应的作用下引起磁体41平行于主轴线x2的平移,这导致可形变部分20沿主轴线x2的伸长/收缩形变。通过选择性地为引导线圈43、45和线性致动线圈42供电,然后可以致动推进元件2的旋转和伸长/收缩形变,这允许确保微型机器人10的方向操纵和推进。
[0088]
线性致动线圈42和引导线圈43、45的相关布置在图10的放大图中示出。该图示出了用于容纳线圈42、43、45的相应凹槽232、233、235。容纳在凹槽232中的线性致动线圈42的中心轴线与推进元件2的主轴线x2对准。容纳在凹槽233中的引导线圈43的中心轴线相对于推进元件2的主轴线x2沿朝上的方向和延伸到图10中的视图平面中的方向偏移。最后,容纳在凹槽235中的引导线圈45的中心轴线相对于推进元件2的主轴线x2沿朝下的方向和从图10中的视图平面射出的方向偏移。
[0089]
在图11所示的第七实施例中,与第六实施例的元件相似的元件具有相同的附图标记。在该第七实施例中,推进和操纵设备1包括三个引导线圈43、45、47(未示出),这些引导线圈各自设有与电能源的相应连接件并且被配置为与固定到推进元件2的前部分的永磁体41形成电磁换能器。在图11中,示出了用于容纳引导线圈43、45、47的相应凹槽233、235、237。三个引导线圈43、45、47沿推进元件2的主轴线x2的方向前后相继地设置,这些引导线圈的中心轴线基本平行于主轴线x2且不与该主轴线重合。
[0090]
尤其是,在图11所示的示例中,容纳在凹槽233中的引导线圈43的中心轴线相对于推进元件2的主轴线x2沿朝下的方向和延伸到图11中的视图平面中的方向偏移。容纳在凹槽235中的引导线圈45的中心轴线相对于推进元件2的主轴线x2沿朝上的方向和延伸到图11中的视图平面中的方向偏移。最后,容纳在凹槽237中的引导线圈47的中心轴线相对于推进元件2的主轴线x2沿朝下的方向和从图11中的视图平面射出的方向偏移。三个引导线圈43、45、47被配置为,当这些引导线圈被同时用电能供电时,致动推进元件2的可形变部分20沿主轴线x2的伸长/收缩形变,并且当这些引导线圈被选择性地通电时,引起磁体41相对于其息止位置的旋转,从而导致推进元件2围绕横向于主轴线x2的旋转轴线的旋转。
[0091]
在图12所示的第八实施例中,与第六实施例的元件相似的元件具有相同的附图标记。在该第八实施例中,推进和操纵设备1包括线性致动线圈42和三个引导线圈43、45、47(未示出),其各自设有与电能源的相应连接件并且被配置为与固定到推进元件2的前部分的永磁体41形成电磁换能器。在图12中,示出了用于容纳线圈42、43、45、47的相应凹槽232、233、235、237。线性致动线圈42被设置在推进元件2的后部,该线性致动线圈的中心轴线基本平行于推进元件2的主轴线x2,而三个引导线圈43、45、47围绕线性致动线圈42分布同时彼此等距,这些引导线圈的中心轴线基本垂直于主轴线x2。
[0092]
在该第八实施例中,可形变部分20沿主轴线x2的伸长/收缩形变的致动是通过为线性致动线圈42供电来获得的,而磁体41相对于其息止位置旋转从而导致推进元件2围绕横向于主轴线x2的旋转轴线的旋转的致动是通过选择性地为引导线圈43、45、47供电来获得的。
[0093]
在图13和图14分别示出的第九实施例和第十实施例中,与第六实施例的元件相似的元件具有相同的附图标记。在该第九实施例和该第十实施例中,
[0094]
根据第九实施例和第十实施例的推进元件2像图3所示实施例的推进元件一样包括前部分21、后部分23以及连接前部分21和后部分23的可形变部分20。在该第九实施例和该第十实施例中,可形变部分20是可沿推进元件2的主轴线x2伸长/收缩形变的螺旋弹簧。轴线x2以与之前相同的方式限定,像可形变部分20的中心轴线,该中心轴线基本垂直于可形变部分20所紧固到的后部分23的远端板230的平面。形成可形变部分20的螺旋弹簧包括三个柔性支腿22、24、26,这些柔性支腿围绕主轴线x2被螺旋地设置在推进元件2的前部分
21与后部分23之间。
[0095]
在该第九实施例和该第十实施例中,形成可形变部分20的螺旋弹簧与至少一个引导元件3、5、7配合,所述引导元件各自在推进元件2的前部分21与后部分23之间延伸。在未示出的实施例中,引导元件围绕螺旋弹簧延伸。在第九实施例和第十实施例中,螺旋弹簧围绕至少一个引导元件3、4、5延伸。更特别地,在第九实施例和第十实施例中,设备1包括三个引导元件3、5、7,这些引导元件各自形成可形变的支腿或段,该可形变的支腿或段围绕主轴线x2被螺旋地设置在推进元件的前部分21与后部分23之间。在图13所示的第九实施例中,可形变段3、5、7和柔性支腿22、24、26均匀分布在推进元件2的圆周上,使得推进元件2具有柔性支腿22、24、26和可形变段3、5、7的圆周交替。在图14所示的第十实施例中,每个可形变段3、5、7与螺旋弹簧的柔性支腿22、24、26径向对准。因此,在图13、图14的实施例中的每一个中,每个柔性支腿22、24、26与引导元件3、5、7配合。
[0096]
与前述实施例类似,每个可形变段3、5、7包括例如电活性材料(例如pedot离子电活性聚合物)。因此,三个引导元件3、5、7中的每一个在电能供应的作用下可以可逆地形变。每个引导元件3、5、7适于通过其在被用电能供电时的形变来引起对应的柔性支腿22、24、26的形变和推进元件2的旋转。对于每个引导段3、5、7来说,由引导段的形变引起的旋转的轴线横向于推进元件2的主轴线x2以及横向于由其他两个引导元件中的每一个的形变引起的旋转的轴线。引导段3、5、7围绕推进元件2的主轴线x2的各向同性分布允许像第一实施例一样优化推进元件2的方向操纵。因此,无论哪个实施例,应当注意的是,在本发明中,引导段3、5、7与柔性支腿22、24、26形成确保旋转和推进的独特的多用途功能组。本发明不以各自确保不同功能的不同元件的任何耦合为特征。
[0097]
在图15和图16所示的第十一实施例中,与第一实施例的元件相似的元件具有相同的附图标记。在第十一实施例中,用于推进和操纵微型机器人10的设备1像先前的实施例一样被配置为在粘性或粘弹性材料中(例如在受试者大脑的脑脊液或细胞外基质中)移动,这些材料是具有低雷诺数的流体材料。
[0098]
在图15和图16中,示出了推进元件2的一个替代实施例。在该第十一实施例中,推进元件2包括前部分21、后部分23以及连接前部分21和后部分23的可形变部分20。可形变部分20被分成前子部分20a和后子部分20b,两个子部分20a、20b通过振荡盘30连接在一起。振荡盘30位于前部分21与后部分23之间,与它们中的每一个等距。在图15和图16所示的示例中,振荡盘30具有与远端板230相似的直径。尽管如此,在未示出的实施例中,振荡盘30的直径可以大于远端板230的直径。
[0099]
在息止时,振荡盘30基本平行于远端板230。在该实施例中,推进元件2的振荡盘30在其表面处包括多个推进纤毛28,这些推进纤毛被配置为与材料相互作用,微型机器人10在该材料中移动。可形变部分20的按顺序的伸长/收缩循环引起推进纤毛28在材料中的移动,从而产生引起微型机器人10移动的推进力。因此,可以有利的是,振荡盘30具有比远端板230更大的直径,以便便于推进纤毛28在该振荡盘上的附接。
[0100]
在该第十一实施例中,可形变部分20的前子部分20a是可沿推进元件2的主轴线x2伸长/收缩形变的螺旋弹簧。推进元件2的主轴线x2在本文中以与先前的实施例相似的方式限定,像可形变部分20的中心轴线一样,该中心轴线基本垂直于可形变部分20所紧固到的后部分23的远端板230的平面。形成可形变部分20的前子部分20a的螺旋弹簧包括三个柔性
支腿22、24、26,这些柔性支腿围绕主轴线x2被螺旋地设置在推进元件的前部分21与振荡盘30之间。
[0101]
在该第十一实施例中,可形变部分2的后子部分20b包括基于电活性材料(例如pedot离子电活性聚合物)的至少一个引导元件3、5、7。更具体地,在本发明的第十一实施例中,可形变部分2包括形成引导段3、5、7的三个引导元件3、5、7。三个引导段3、5、7中的每一个通过电能供应的作用都可以可逆地形变,并且连接到电源。在息止时,三个引导段3、5、7具有相同的长度。如图15清楚地示出,引导段3、5、7围绕推进元件2的主轴线x2各向同性地分布,这允许优化推进元件的方向操纵。三个引导段3、5、7中的每一个形成在可形变部分2的后部分23与振荡盘30之间延伸的支腿。更具体地,三个引导段围绕主轴线x2被螺旋地设置在推进元件2的后子部分23与振荡盘30之间。如已经提到的,每个引导段3、5、7适于通过其在被用电能供电时的形变来引起振荡盘30的倾斜。这在图16中示出。随着三个引导段3、5、7中的每一个被激活,振荡盘30在不同方向上倾斜,从而引起旋转摆动运动。这种旋转摆动运动引起推进元件2的旋转。对于每个引导段3、5、7来说,由引导段的形变引起的旋转的轴线横向于推进元件的主轴线x2以及横向于由其他两个引导段中的每一个的形变引起的旋转的轴线。因此,同样在该实施例中,尽管存在振荡盘30,引导段3、5、7与柔性支腿22、24、26直接配合,并与这些柔性支腿形成确保旋转和推进两者的独特的多用途功能组。本发明不以各自确保不同功能的不同元件的任何耦合为特征。
[0102]
如从先前的示例中得出的,根据本发明的推进和操纵设备允许通过以配合的方式一方面致动推进元件围绕横向于彼此并横向于主轴线的至少两个旋转轴线旋转,另一方面致动推进元件的可形变部分的形变以引起微结构的推进,来在3d空间中可靠且准确地移动微结构。有利地,由于能够为每个引导元件以及如果存在可以为线性致动器独立地启动能量供应,可以考虑用于致动推进元件的可形变部分的旋转和形变的所有空间和时间的组合。尤其是,根据需要,旋转和形变可以同时被致动,或者被一个接一个地致动,这允许使该微结构根据在其环境中的期望轨迹移动。
[0103]
应该记住,在毫米尺度上,在低雷诺数的环境中,要移动的最小元件需要大量能量。所涉及的摩擦力相当大。尽管取决于摩擦的类型(干摩擦、粘性摩擦等)和机器人的尺寸,但众所周知,通常,低雷诺数意味着与体积力相比,表面力占主导地位。在这种情况下,例如,优化机器人的整体尺寸比优化其重量更合适。
[0104]
因此,设备越小,其包含的功能元件越少,移动所述设备的能量消耗就越低。由于该设备的较小尺寸和功能元件的数量的减少(通过不同元件、尤其是引导段的多功能方面,使减少成为可能),本发明实现对于给定移动的显著能源节省。
[0105]
本发明不限于所描述和示出的示例。
[0106]
特别地,在先前的示例中,推进元件的可形变部分是具有一个、两个或三个柔性支腿的螺旋弹簧。替代地,推进元件的可形变部分可包括具有任意数量的柔性支腿的螺旋或非螺旋弹簧或者不同于弹簧的可形变结构(例如波纹管)。推进元件的可形变部分还可以包括弹簧和波纹管的组合,波纹管的每个折叠例如定位在弹簧的一圈处,并且波纹管的包络填充了弹簧的连续圈之间的空间。
[0107]
此外,在推进和操纵设备包括用于致动推进元件的可形变部分的伸长/收缩形变的专用线性致动器的情况下,线性致动器可以是不同于如前述的涉及电磁线圈和永磁体的
电磁换能器的致动器。尤其是,在可形变部分具有密封包络的情况下,例如在波纹管的情况下,用于致动可形变部分的伸长/收缩形变的致动器可以是泵,然后可以通过泵所致动的可形变部分的内部空间中的交替流体流入/流出来获得可形变部分的伸长/收缩。
[0108]
此外,在实施包括活性材料的引导段的先前示例中,不同引导段的活性材料都具有相同的性质。替代地,根据本发明的推进和操纵设备可以包括具有不同成分或性质的活性材料的多个引导段。例如,包括电活性材料的引导段可以与包括双金属元件的引导段组合;或者包括光活性材料的引导段可以与包括电活性材料或双金属元件的引导段组合,用于激活引导段的不同能量供应连接件被相应地调整。基于活性材料的引导段也可以与图8至图12的实施例的那些类型的引导线圈组合。
[0109]
在推进和操纵设备包括引导线圈作为用于引起推进元件的旋转的引导元件的情况下,当然也可以考虑与图8至图12的实施例的不同的引导线圈布置。尤其是,引导线圈的数量是大于或等于两个的任意数量,引导线圈可以前后相继地设置,一个接一个地设置,或者甚至同心地设置,同时与或不与线性致动线圈组合。
[0110]
图中未示出的有利布置包括例如:围绕推进元件的主轴线分布的三个引导线圈,其中心轴线基本平行于主轴线,同时彼此等距设置;围绕推进元件的主轴线分布的六个引导线圈,其中心轴线基本平行于主轴线,同时彼此等距设置。在这两种情况下,根据需要,引导线圈可以要么在没有线性致动线圈的情况下被设置在推进元件的后部处,然后可形变部分沿主轴线的伸长/收缩形变的致动是通过同时用电能为所有引导线圈供电来获得的,而磁体相对于其息止位置的旋转从而导致推进元件围绕横向于主轴线的旋转轴线的旋转的致动是通过选择性地为引导线圈供电来获得的;要么被设置在推进元件的后部处,同时与线性致动线圈组合,然后可形变部分沿主轴线的伸长/收缩形变的致动是通过为线性致动线圈供电来获得,而磁体相对于其息止位置的旋转从而导致推进元件围绕横向于主轴线的旋转轴线的旋转的致动是通过选择性地为引导线圈供电来获得的。
[0111]
最后,本发明已经被示出用于微型机器人的推进和操纵,该微型机器人旨在在粘性或粘弹性材料(例如受试者大脑的脑脊液或细胞外基质)中移动。替代地,根据本发明的推进和操纵设备当然可以被实施为在医学领域或其他领域中移动其他类型的微结构,尤其是根据本发明的设备可以用于推进和操纵可移动的柔性管(例如支架或导管)。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。