把手及电子装置
1.本发明为分案申请,原申请的申请号为:cn201910154906.1,申请日为2019年03月01日,发明名称为“把手”。
技术领域
2.本发明涉及用于支撑电子装置或供提拿电子装置的把手的技术领域,尤其涉及一种局部可弹性变形的刚性把手及电子装置。
背景技术:
3.现有的军规平板电脑为了便于拿取,其一安装侧可枢设有把手。一般而言,把手除了供使用者提起平板电脑之外,也可用于支撑平板电脑使其站立于桌面。因此,把手多以刚性较强的材质制成以提供足够的支撑力。当使用者握持平板电脑的前述安装侧时,使用者将手掌穿过把手与安装侧之间的间隙,部分使用者可能因手掌较大而无法穿过把手。若加大把手与安装侧的间距以适应手掌较大的使用者,则使得手掌较小的使用者握持平板电脑的安装侧时,其手背无法抵接把手而造成把手摇晃。因此现有的军规平板电脑的把手设计无法通用于所有的使用者。
4.有鉴于此,本技术提供一种把手及电子装置,以克服现有技术中把手存在的上述问题。
技术实现要素:
5.本发明的发明目的为提供一种局部可弹性变形的刚性把手及电子装置。
6.本发明提供一种把手,用于枢设在一电子装置的一安装侧,包括一对刚性摆臂以及一弹性带。刚性摆臂沿同一枢转轴线分别枢接在电子装置的安装侧。弹性带连接在该对刚性摆臂之间。
7.本发明的把手,其弹性带包含间隔设置的若干个块体以及分别连接在相邻的各块体之间的若干个连接段。
8.本发明的把手,其电子装置的两面分别为一显示面以及一背面,电子装置上设置有一止挡部,当把手枢转至位于电子装置的背面时,止挡部抵接其中一刚性摆臂而固定把手的位置。
9.本发明的把手,其一对刚性摆臂以双料射出的方式分别嵌设于弹性带中,弹性带可利用未嵌设该对刚性摆臂的部分沿枢转轴线的径向变形。当电子装置的重量施加于把手时,弹性带通过该对刚性摆臂维持原形。
10.本发明的把手,其各刚性摆臂的一端为一枢接端,各枢接端分别枢接电子装置且该对刚性摆臂分别自各枢接端相向弯曲延伸而分别形成一支撑段,弹性带延伸连接在该对支撑段之间。各支撑段的侧面上分别凸设有一隆起部。至少其中一支撑段上横向开设有一穿孔。各支撑段以双料射出的方式嵌设于弹性带中,弹性带可利用未嵌设各支撑段的部分沿枢转轴线的径向变形。当电子装置的重量施加于把手时,弹性带通过各支撑段维持原形。
各隆起部分别凸出且高于支撑段的侧面。一穿孔开设于至少其中一支撑段上且横向贯穿隆起部。各隆起部分别以双料射出的方式嵌设于弹性带中。
11.本发明提供一种电子装置,电子装置的一安装侧枢设有把手。
12.本发明的有益效果为:
13.本发明提供一种把手及电子装置,当电子装置立置于平面时,把手的刚性摆臂能够用于支撑电子装置的重量。当使用者手持电子装置时,把手的弹性带能够弹性变形以适应各使用者不同尺寸的手掌。
附图说明
14.图1至图6为本发明较佳实施例的把手的各种使用状态示意图;
15.图7为本发明较佳实施例的把手的立体示意图;
16.图8为本发明较佳实施例的把手的剖视图;
17.图9为本发明较佳实施例的把手中的刚性摆臂的立体示意图;
18.图10为本发明较佳实施例的把手中的刚性摆臂的剖视图;
19.图11为本发明较佳实施例的把手中的弹性带弹变形的示意图。
具体实施方式
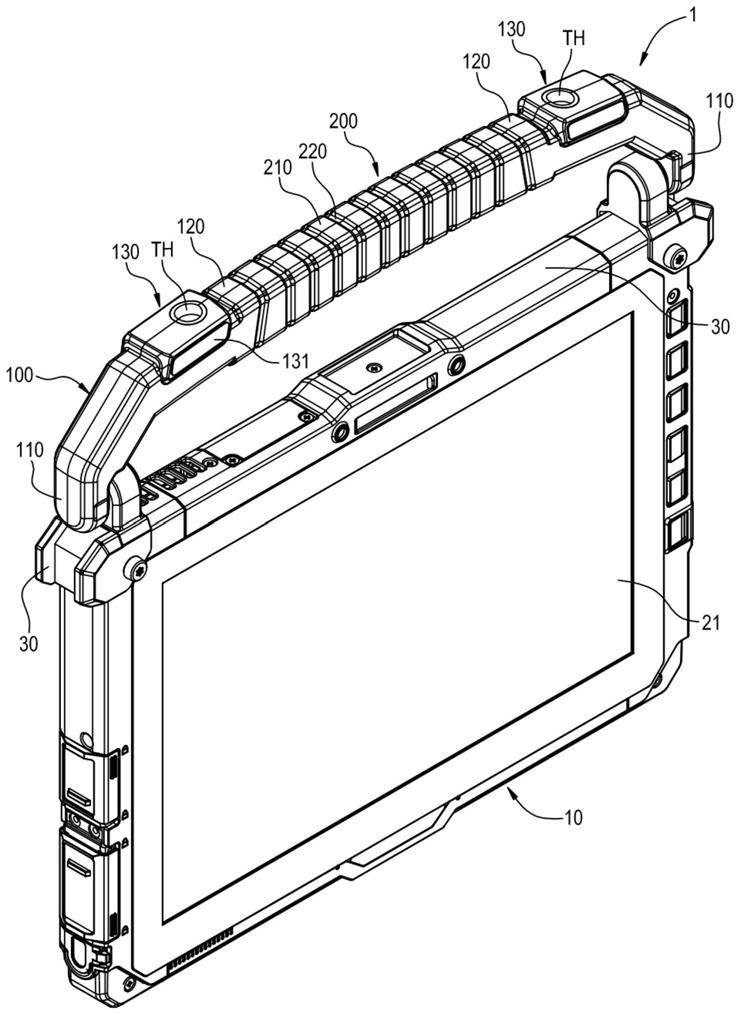
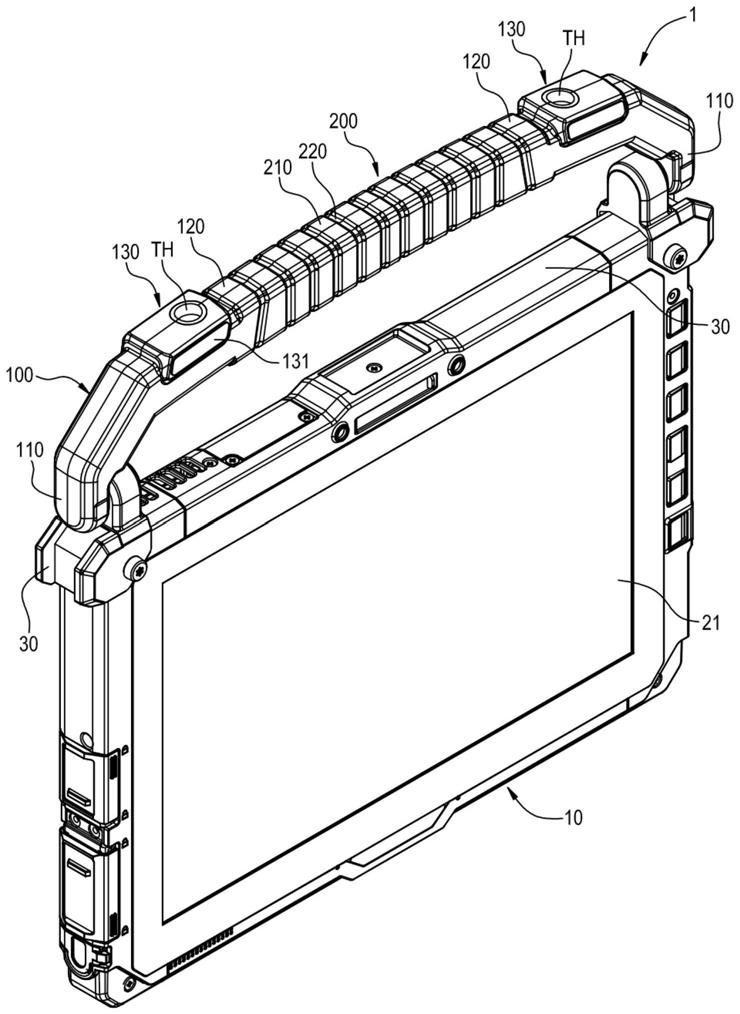
20.如图1至图3所示,本发明的较佳实施例提供一种把手1,此把手1用于枢设在一电子装置10的一安装侧11而用于支撑或供提拿电子装置10。电子装置10呈板平状,其较佳地为平板电脑,且于平板电脑的电性对接侧12具有电性对接连接器或若干个电性对接端子,用以电性对接于一传输座或其他电子装置,而安装侧11则设置于平板电脑相对电性对接侧12的对侧,但本发明不以此为限。电子装置10的两面分别为一显示面21以及一背面22,且电子装置10上设置有至少一止挡部30。
21.如图1所示,把手1能够供使用者握持以提起电子装置10。当把手1如图2及图3所示枢转至位于电子装置10的背面22时,把手1如图4所示能够支撑电子装置10而使电子装置10立起于放置的平面上。比如,电子装置10直立于放置的平面上。如图5所示,电子装置10平放且通过把手1支撑而向上仰起。再者,如图6所示,使用者可将手掌2穿过把手1与电子装置10之间而握持电子装置10,并且通过把手1的弹性恢复力束缚手掌2以防止滑脱。
22.请参照图7、图8及图11,于本实施例中,本发明的把手1包含一对刚性摆臂100以及一弹性带220。如图9至图11所示,该对刚性摆臂100间隔设置,各刚性摆臂100的一端为一枢接端110,且各枢接端110分别沿着同一枢转轴线a分别枢接在前述的安装侧11,该对刚性摆臂100较佳地分别枢接在此安装侧11的两端,但本发明不以此为限,例如也可以枢接在此安装侧11的两端之间。而且,该对刚性摆臂100分别自各枢接端110相向弯曲延伸而分别形成一支撑段120。
23.请参照图2至图5,当把手1枢转至位于电子装置10的背面22时,电子装置10上的止挡部30抵接任一刚性摆臂100而固定把手1的位置。而且,各刚性摆臂100的支撑段120分别抵接于放置的平面。借此,支撑电子装置10而使电子装置10立起于放置的平面上。
24.请参照图7、图8及图11,弹性带220延伸连接在该对刚性摆臂100之间,具体而言,弹性带220延伸连接在该对支撑段120之间。于本实施例中,弹性带220较佳地形成有若干个
块体210,该些块体210排列在该对刚性摆臂100的支撑段120之间,相邻的各块体210之间分别通过一连接段220相互连接。连接段220较佳地比块体210窄,因此连接段220凹陷在相邻块体210之间的间隙中,通过块体210能够支撑弹性带220以维持弹性带220的外形,且弹性带220能够弹性变形以容许该些块体210相对位移而改变块体210的排列相对位置。当刚性摆臂100之间的弹性带220受到足够的侧向外力时,此段弹性带220即能够通过弯曲该些连接段220而弹性变形。较佳地,该对刚性摆臂100的支撑段120以双料射出的方式分别嵌设于弹性带220中,弹性带220可利用未嵌设该对刚性摆臂100的部分沿枢转轴线a的径向变形。当电子装置10的重量施加于把手1时,弹性带220通过该对刚性摆臂100的各支撑段120维持原形。
25.较佳地,各支撑段120的侧面上可以选择性地分别凸设有一隆起部130。各隆起部130分别凸出且高于支撑段120的侧面,详细而言,隆起部130位于支撑段120外侧且沿枢转轴线a的径向和周向向外隆起而凸出于支撑段120表面,除此之外,隆起部130还进一步沿枢转轴线a的径向向外隆起一凸缘133,并沿周向的两个方向各自向外隆起一第一外露部131和一第二外露部132,以供双料射出时模具夹持刚性摆臂100之用,换言之,通过夹持于刚性摆臂100的第一外露部131和第二外露部132,使得刚性摆臂100悬置于模具中。
26.在本实施例中,当弹性带200的软料包覆于隆起部130时,软料会止于硬料的凸缘133周侧。然而,在其他具体实施例中,隆起部130不具有前述凸缘133,而弹性带200的软料和隆起部130的硬料共同止于穿孔th。在本实施例中,第一外露部131和第二外露部132均自软料中外露,其中第一外露部131露出的面积明显大于第二外露部132的外露面积,而相较于第二外露部132的外露面切齐软料所形成的外表面,第一外露部131的外露面则是稍微隆起而凸出于软料所形成的外表面,且安装把手1时,第一外露部131与显示面21同侧,第二外露部132则与背面22同侧。
27.当电子装置10利用把手1立于平面而与平面之间呈现一倾斜角时,可在尽量远离枢转轴线a的位置利用第一外露部131露出的表面作为支撑脚垫,使得把手1可利用第一外露部131提供足够支撑电子装置10质量中心以第一外露部131为支点所形成的转动惯量或惯性矩,因为第一外露部131在支撑平面上远离电子装置10质量中心于平面上的投显点,使得操作者在使用电子装置10的触控功能而抵触显示面21时,把手1也可利用第一外露部131来提供足够的反作用力,而不致于倾覆电子装置10。
28.当电子装置10立置于平面时,凸出的第一外露部131作为脚垫,使得把手1与平面仅接触于二处第一外露部131和枢接端110端缘,其余则大致悬空,而电子装置10则利用止挡部30端缘接触支撑平面,因此能够避免接触点过多而致使把手1因为接触面的制造公差而不平整,又可提供电子装置10足够的支撑。且各隆起部130分别以双料射出的方式嵌设于弹性带220的软料中。至少其中一个支撑段120上可以选择性地横向开设有一穿孔th,且穿孔th较佳地可以横向贯穿隆起部130而被定位于预定的支撑点(即第一外露部131)。穿孔th可供插设一杆体(附图中未示出),借此延伸支撑点和电子装置10质心之间的距离而更稳固地支撑电子装置10。本发明不限定杆体的形式,例如一般的笔杆或随附的触控笔是最简易的形式。
29.如图1所示,当把手1枢转至与电子装置10位于同一平面上时,使用者可握持该对刚性摆臂100之间的弹性带220而提起电子装置10。如图6及图11所示,当把手1枢转至位于
电子装置10的背面22时,使用者可将手掌2穿过弹性带220与电子装置10之间而握持电子装置10,并且通过弹性带220的弹性恢复力束缚手掌2以防止滑脱,而刚性摆臂100则于提取或支撑电子装置10时提供足够的结构刚性,且当电子装置10连同把手1在内于落摔测试时,也可通过刚性摆臂100来满足所需的结构刚性。弹性带220与电子装置10的一安装侧11的预设间距配合手掌2尺寸较小的使用者。当配合手掌2尺寸较大的使用者时,弹性带220能够被较大手掌2向外撑开而弹性变形,借此而能适应各使用者不同尺寸的手掌2。
30.综上所述,本发明的把手1包含通过双料射出成形方式结合为一的刚性摆臂100以及弹性带220。当电子装置10立置于平面时,刚性摆臂100能够用于支撑电子装置10的重量。当使用者手持电子装置10时,弹性带220能够弹性变形以适应各使用者不同尺寸的手掌2。因此本发明的把手1不但可兼用于支撑及束缚,且能够适用于束缚不同尺寸的手掌2。
31.本发明还提供一种电子装置,该电子装置10的一安装侧枢设有把手。
32.显然,本发明的上述实施例仅仅是为了清楚说明本发明所作的举例,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明权利要求的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。