1.本发明是有关于一种例如将输入轴的驱动往输出轴减速,而进行旋转传递的减速装置。本发明特别是有关于一种摇动型减速装置,其能够增大输入轴与输出轴的交叉角,在机器人的手臂等中,消除驱动机构部的偏移量(off-set volume)而实现紧密化,而可达到与人、动物等的关节性驱动近似之摇动型减速装置。
背景技术:
2.作为一般的正交型的减速装置,具有伞齿轮(bevel gear)、人字齿轮(hyperboloidal gear)、蜗杆(worm)及蜗形齿轮(worm gear)等齿轮机构等。另外,作为这些减速装置,具有以单独机构进行减速者、以及一般同轴的摇动型减速机构的组合而成者。这些减速装置以机器人的关节部为代表而在多个领域中使用。
3.先前技术文献
4.专利文献
5.专利文献1:日本专利第3790715号公报
6.专利文献2:日本专利第3711338号公报
技术实现要素:
7.发明要解决的课题
8.其中,作为具有直角或交叉角而轴心相交者,可列举具有伞齿轮机构的减速装置,然而在使用齿轮机构的情况下,由于必会产生齿轮彼此的齿隙,进而造成驱动时的精度降低,并且无法避免噪音的产生。
9.另外,这些齿轮机构中,减速是通过输入侧与输出侧的齿轮数比来进行,因此为了获得较大的减速比,需要较大齿轮数比的齿轮,而需要较大的空间。且由于齿轮的啮合是在远离轴心的位置进行,因此同时啮合的齿数亦少。此外,具有因啮合的容许差或轴心挠曲等影响所导致的旋转精度的降低、或者定位精度的降低,进而旋转时容易产生噪音等课题。
10.本案发明人等提出了一种装置,作为具有直角或较大的交叉角的摇动型减速装置,如专利文献1及专利文献2所示,使输入旋转经由球状的岁差运动体(各文献中的摇动体)而转换成岁差运动,进而通过与岁差运动体的球状部表面的一部分卡合而摇动的输出用摇动体,而转换成使轴心正交的输出轴的旋转运动。
11.这些摇动型减速装置中,由于能够使齿隙趋近于零,且能够产生构造上较大的减速比,因此相较于伞齿轮机构等,能够使装置整体小型化。
12.在这些专利文献1及专利文献2的摇动型减速装置中,能够对伞齿轮机构等进行小型化,然而近年来,在机器人手臂等中,期望的是进一步小型的关节机构。
13.本案发明人等欲制作相较于先前的摇动型减速装置更小型的原作装置,然而发现在先前的机构中,难以形成为使岁差运动体及输出用摇动体进行驱动,而用以使必要之球状构件转动的轨道用之循环槽。
14.本发明的目的在于提供一种摇动型减速装置,其具有较大的交叉角,并且与先前的减速装置相较下,能够进一步地进行小型化。
15.用于解决课题的手段
16.为了达成上述目的,本发明的摇动型减速装置在x-y-z座标系中,由下列构件构成:
17.输入轴,以沿x轴方向延伸的输入轴心为中心,旋转自如地支撑于本体;
18.岁差运动体,具有球状部及一对岁差轴部,前述一对岁差轴部系沿着通过前述球状部的中心的岁差轴心而从两侧突出,其中一个前述岁差轴部以x轴为中心,以能够进行岁差运动的方式保持于前述输入轴;
19.岁差运动支撑体,相对于前述本体以岁差运动自如的方式支撑前述岁差运动体,并且固定于前述本体;
20.摇动体,于z轴方向上,其卡合于前述岁差运动体的与前述岁差运动支撑体侧为相反侧的表面,且通过前述岁差运动体的岁差运动而摇动;
21.摇动支撑体,其卡合于前述摇动体,而相对于前述本体支撑前述摇动体的摇动;以及
22.输出轴,以z轴方向为轴,旋转自如地支撑于前述本体,且卡合于前述摇动体,并通过前述摇动体的摇动而旋转;
23.在前述岁差运动体的前述岁差运动支撑体侧的面设有岁差运动环状槽,前述岁差运动环状槽系为在前述岁差运动体的岁差运动时,将在前述岁差运动体与前述岁差运动支撑体之间所描绘的轨迹设为槽,在前述岁差运动环状槽转动的岁差运动球体旋转自如地保持于前述岁差运动支撑体;
24.在前述岁差运动体的前述摇动体侧的面设有摇动环状槽,前述摇动环状槽在前述岁差运动体的岁差运动时,以z轴为中心,在圆周方向及z轴方向使前述摇动体摇动,在前述摇动环状槽转动的摇动用球体旋转自如地保持于前述摇动体的前述岁差运动体侧的面;
25.在前述摇动体的前述摇动支撑体侧的面设有摇动导引槽,前述摇动导引槽导引前述摇动体的摇动运动,在前述摇动导引槽转动的摇动导引球体旋转自如地保持于前述摇动支撑体;
26.在前述摇动体的前述输出轴侧的面遍布全周而设有波状槽,前述波状槽为前述摇动体摇动一周期量额的复数连续的圆弧状槽所形成,在前述波状槽转动的输出用球体旋转自如地保持于前述输出轴。
27.本发明的摇动型减速装置通过输入轴的旋转而使岁差运动体进行岁差运动,将岁差运动体的岁差运动转换成摇动体的摇动,且通过波状槽与输出用球体而将摇动体的摇动转换成输出轴的旋转运动。依据该结构,通过输入轴的一次旋转,岁差运动体会进行一周期的岁差运动,且通过该一周期的岁差运动,摇动体会进行一周期的摇动,进而通过该一周期的摇动,输出轴仅旋转一周期量额的圆弧状槽,因此能够轻易地获得较大的减速比。
28.另外,于本发明的摇动型减速装置中,为了进行圆滑的动作,需要岁差运动环状槽、摇动环状槽、以及波状槽的精密的槽加工。于本发明中,岁差运动环状槽及摇动环状槽设于球状的岁差运动体的表面,波状槽设于摇动体的表面。过去,为了将这些槽设于构件的内周面,而加工困难,进一步的小型化存在困难的状况。本发明中,与如此的先前装置相较
下,槽的加工变得容易,且与先前技术相较下,能够实现进一步小型化的摇动型减速装置。
29.此外,本发明的摇动型减速装置中,前述岁差运动支撑体亦可具备岁差赋能单元,前述岁差赋能单元经由弹性构件安装至前述本体,将前述岁差运动球体朝前述岁差运动环状槽进行赋能。依据该结构,岁差运动体进行岁差运动时,由于岁差运动支撑体通过岁差赋能单元而对岁差运动体进行赋能,因此能够进行圆滑的岁差运动。
30.另外,于该结构中,前述岁差运动支撑体亦可为朝向前述球状部的中心,将前述岁差运动球体朝前述岁差运动环状槽进行赋能。通过该结构,在对岁差运动球体施加荷重的情况下,能够使该荷重均等地分散。
31.此外,本发明的摇动型减速装置中,摇动支撑体亦可具备摇动赋能单元,前述摇动赋能单元经由弹性构件安装至前述本体,将前述摇动导引球体朝前述摇动导引槽进行赋能。依据该结构,摇动体进行摇动时,由于摇动支撑体具备将摇动导引球体朝摇动导引槽进行赋能的摇动赋能单元,因此能够进行圆滑的摇动。
32.发明的效果
33.根据本发明,能够提供一种摇动型减速装置,其为具有较大交叉角的减速装置,且与先前的减速装置相较下,能够进行进一步的小型化。
附图说明
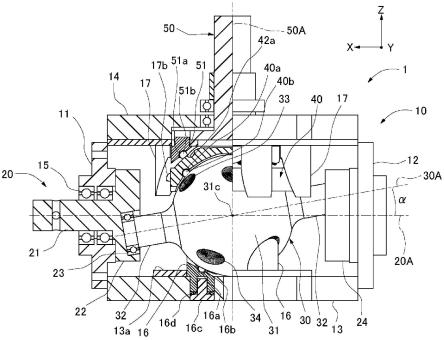
34.图1为表示本实施形态的摇动型减速装置的部分剖面图。
35.图2(a)为图1的摇动型减速装置的分解图,图2(b)为图2(a)的b-b线扩大剖面图。
36.图3(a)为表示设置于岁差运动体的球状部的上表面侧的摇动环状槽的说明图,图3(b)为表示设置于球状部的下表面侧的岁差运动环状槽的说明图。
37.图4为表示位于图1的摇动型减速装置中的岁差运动体上方之各构件的分解图。
38.图5(a)至图5(c)为表示本实施形态的摇动体的结构的说明图。
39.图6为用于说明岁差运动体的岁差运动环状槽的结构的剖面图。
40.图7为表示球状部的下表面侧的岁差运动环状槽与岁差运动球体之关系的说明图。
41.图8为表示球状部的上表面侧的摇动环状槽与摇动用球体之关系的说明图。
42.图9为表示摇动部的上表面的波状槽与输出用球体之关系的说明图。
43.图10为表示岁差运动支撑体的变形例的说明图。
44.符号说明
45.1、1a:摇动型减速装置
46.10、10a:本体
47.11:前板
48.12:后板
49.13、13b:底板
50.14:顶板
51.15:输入轴承
52.16:岁差运动支撑体
53.16a:凹部
54.16b:岁差运动球体
55.16d:板弹簧
56.17:摇动支撑体
57.17b:摇动导引球体
58.17c:固定构件
59.17d:板弹簧
60.20:输入轴
61.20a:输入轴心
62.21:轴部
63.22:离心部
64.23:岁差轴承
65.24:离心轴承
66.30:岁差运动体
67.30a:岁差轴心
68.31:球状部
69.31c:中心
70.32:岁差轴部
71.33:摇动环状槽
72.34:岁差运动环状槽
73.40:摇动体
74.40a:摇动轴心
75.40a:凹部
76.40b:摇动用球体
77.41:支撑部
78.41a:摇动导引槽
79.42:导引部
80.42a:波状槽
81.42b:圆弧状槽
82.50:输出轴
83.50a:输出轴心
84.51:输出支撑体
85.51a:凹部
86.51b:输出用球体
具体实施方式
87.接着,将针对作为本发明的实施形态的一例的摇动型减速装置,参照图1至图10来进行说明。
88.如图1所示,本实施形态的摇动型减速装置1在x-y-z座标系中,具备:包围装置整体的本体10、以输入轴心20a为中心旋转自如地保持于本体10的输入轴20、通过输入轴20的
旋转而进行岁差运动的岁差运动体30、在岁差运动体30的z轴方向的上方位置卡合于岁差运动体30且通过岁差运动而摇动的摇动体40及通过摇动体40的摇动且以z轴为中心来进行旋转的输出轴50。
89.如图1及图2所示,本体10具有:旋转自如地支撑输入轴20的前板11、设于输入轴20的相反侧的后板12、设于底面的底板13、及设于顶面的顶板14。该本体10能够根据例如机器人手臂的关节部分等所应用的机器来适当变更形状。
90.输入轴20具备:在本体10的前板11经由输入轴承15而保持的轴部21、以及在从沿x轴方向延伸的输入轴心20a离心的位置旋转自如地保持岁差运动体30的一个岁差轴部32的离心部22。在离心部22中,通过岁差轴承23旋转自如地保持岁差轴部32的前端部分。若使该输入轴20进行旋转,则与轴部21成为一体的离心部22亦进行旋转,并使岁差轴部32离心而进行旋转,由此能够使岁差运动体30进行岁差运动。
91.岁差运动体30具备:形成为球状的球状部31、及沿通过球状部31的中心31c的岁差轴心30a并在两侧突出的一对岁差轴部32。岁差轴心30a为朝向x轴方向并以角度α的离心角度在前后延伸的轴心。本实施形态中,将该角度α设为10
°
。
92.图1中的左侧的岁差轴部32由设于输入轴20的离心部22的岁差轴承23所支撑。图1中的右侧的岁差轴部32通过离心轴承24而离心旋转(岁差运动)自如地保持于本体10,其中该离心轴承24具备与输入轴20的离心部22相同的结构。
93.如图3(a)所示,球状部31的表面中,在其上方的面形成有摇动环状槽33。摇动环状槽33为在岁差运动体30的岁差运动时,以z轴方向的输出轴心50a为中心,以在周方向及z轴方向使摇动体40摇动的方式进行导引的槽。本实施形态中,在球状部31的上表面形成有8处摇动环状槽33。此外,本案中,于局部图式中,为了表示摇动环状槽33等的槽的形状,而使用了复数条细线。
94.另外,如图3(b)所示,在球状部31的下方,形成有岁差运动环状槽34。岁差运动环状槽34为呈现岁差运动体30的岁差运动时,在球状部31的表面与后述的岁差运动支撑体16之间所描绘的轨迹而形成的槽。本实施形态中,在球状部31的下表面形成有6处岁差运动环状槽34。
95.参照图1及图2(a),在球状部31的下方,支撑岁差运动体30的岁差运动支撑体16固定于底板13。本实施形态中,该岁差运动支撑体16配合岁差运动环状槽34的位置,在x轴方向设有2个、且在左右(y方向)各设置有2个,合计6个(参照图2(a))。
96.该岁差运动支撑体16成为将圆柱状的构件斜向切断的形状,在其斜面设有凹部16a。在该凹部16a旋转自如地保持有作为金属制球的岁差运动球体16b。岁差运动球体16b在岁差运动体30的岁差运动时,一边抵接岁差运动环状槽34,一边进行转动。
97.另外,如图1所示,岁差运动支撑体16经由作为岁差赋能单元的板弹簧16d而安装于固定构件16c,其中该固定构件16c固定于底板13的贯通孔。通过该结构,岁差运动支撑体16形成为:通过作为弹性构件的板弹簧16d的弹性力,将岁差运动球体16b赋能至岁差运动体30的岁差运动环状槽34。
98.另外,岁差运动支撑体16系如同后述的摇动支撑体17(参照图4),固定于固定构件16c之侧的外周面经加工成d形,通过固定于底板13的表面的导引板13a来防止旋转。
99.如图4及图5所示,摇动体40整体形成为圆顶状。如图5(b)所示,在其内周面设有半
球状的凹部40a。本实施形态中,凹部40a设于8处,摇动用球体40b旋转自如地保持于该凹部40a。
100.另外,在摇动体40的上表面侧形成有:通过摇动支撑体17所支撑的支撑部41、以及输出轴50的输出支撑体51经由输出用球体51b而抵接的导引部42。于支撑部41形成有进行摇动体40之摇动的导引的摇动导引槽41a。在导引部42形成有用于将摇动体40的摇动转换成输出轴50的旋转运动的波状槽42a。
101.如图5(a)至图5(c)所示,设置于摇动体40的支撑部41的摇动导引槽41a在z轴方向成为纵长的椭圆形。通过保持于摇动支撑体17的摇动导引球体17b抵接于该摇动导引槽41a,而导引摇动体40的摇动运动。
102.如图4所示,摇动支撑体17成为将圆柱状的构件斜向切断的形状,于该斜面设有凹部17a。于该凹部17a旋转自如地保持有摇动导引球体17b。
103.另外,如图2(b)所示,摇动支撑体17经由作为摇动赋能单元的板弹簧17d而安装于固定构件17c,其中该固定构件17c固定于顶板14的贯通孔。通过该结构,摇动支撑体17经由作为弹性构件的板弹簧17d的弹性力,成为将摇动导引球体17b赋能至摇动体40的摇动导引槽41a的状态。
104.如图5(a)所示,设于摇动体40的导引部42的波状槽42a以摇动体40的摇动的一个周期量额,于周方向连续形成9个在周方向使输出用球体51b移动的圆弧状槽42b。在设于输出轴50的输出支撑体51的凹部51a旋转自如地保持的输出用球体51b抵接于该波状槽42a。
105.如图5(a)所示,本实施形态中,于该导引部42,遍布全周而设有9个一周期量额的圆弧状槽42b。如图4及图5(c)所示,安装于输出轴50的8个输出支撑体51经由输出用球体51b而抵接于该波状槽42a。输出支撑体51成为将圆柱状的构件斜向切断的形状,于该斜面设有凹部51a。于该凹面51a旋转自如地保持有输出用球体51b。
106.接着,参照图6及图7,针对岁差运动体30进行岁差运动时,岁差运动环状槽34与岁差运动球体16b的关系进行说明。图6的状态为左侧的岁差轴部32位于z轴方向的最下部。若将该状态设为初始位置,则此时的岁差运动环状槽34与岁差运动球体16b的位置关系如图7所示。
107.岁差运动环状槽34为以岁差轴心30a相对于输入轴20的输入轴心20a的角度α进行旋转时,所得的对于岁差运动体30之球状部31表面的某固定点(此情况为岁差运动球体16b)的轨迹。
108.具体而言,若将从球状部31表面的初始位置使输入轴20旋转角度θ(
°
)时的座标位置设为p1,且将该p1在岁差轴心30a进行座标转换而成的位置设为p2,则各自的座标如下式所表示。
109.p1=po·e20a
·
θ
ꢀꢀꢀ
(1)
110.p2=p1·e30a(-θ)
ꢀꢀꢀ
(2)
111.上述式(1)及式(2)的e为有关于输入轴20之输入轴心20a的旋转θ的转换矩阵。若沿着该式所表示的轨迹,通过与岁差运动球体16b相同形状的工具对球状部31的表面进行加工,则形成有岁差运动环状槽34。
112.接着,参照图8,对岁差运动体30的球状部31的摇动环状槽33进行说明。摇动环状槽33具备:通过岁差运动体30的岁差运动,经由旋转自如地保持在摇动体40的凹部40a的摇
动用球体40b而用于使摇动体40摇动的轨迹。
113.如图8所示,摇动环状槽33设有8个,各自的形状不同。首先,将图8所示的状态作为初始位置,算出使输入轴20旋转角度θ(
°
)时的位置,且算出将该位置通过摇动体40的摇动轴心40a(参照图5(c))进行座标转换的位置而求出其轨迹。该轨迹实际上为并未在成品上显现出形状的中间的假想轨迹,为圆形的轨迹。
114.进而,岁差运动体30的摇动环状槽33的轨迹是从该假想轨迹推导岁差运动体的岁差运动而求出。针对上述轨迹的计算,与前述岁差运动环状槽34的算出顺序同样地使用转换矩阵,重复座标的算出,而算出一周期量额的轨迹。由于具体的手法与专利文献1的手法相同,因此此处省略详细的说明。
115.接着,参照图9,对摇动体40的波状槽42a与输出用球体51b的关系进行说明。图9的输出用球体51b的位置表示岁差运动体30在图1所示状态时的初始位置。于该状态中,波状槽42a所具有的9个圆弧状槽42b中,8个输出用球体51b中的1个位于图9左端的2个圆弧状槽42b的交点42b1。
116.如图9所示,由于输出用球体51b的数量比圆弧状槽42b的数量少1个,因此输出用球体51b的位置成为随着向右侧移动而偏移的位置。此处,从图9的状态将输入轴20旋转一次时,摇动体40将摇动一次,输出用球体51b通过圆弧状槽42b转动,位于左端的输出用球体51b移动至其右上的圆弧状槽42b的交点42b2。若使输入轴20进一步旋转,则依序进行上述动作,当使输入轴20旋转与圆弧状槽42b的数量相同的9次时,返回图9所示的初始位置。
117.如上所述,波状槽42a中的圆弧状槽42b的数量成为输出轴50相对于输入轴20的减速比。因此,在欲增大减速比的情况下,使圆弧状槽42b的数量变多即可。此外,关于形成该波状槽42a的手法,由于与专利文献1的手法相同,因此此处省略详细的说明。
118.本实施形态的摇动型减速装置1通过输入轴20的旋转而使岁差运动体30进行岁差运动,使卡合于该岁差运动体30的摇动体40摇动。并且,通过波状槽42a、输出用球体51b及输出支撑体51的机构,将摇动体40的摇动运动转换成输出轴50的旋转运动。
119.通过该结构,由于本实施形态的摇动型减速装置1在进行输入旋转的减速时并未使用齿轮等,因此能够使装置小型化,且能够极度地减小齿隙。
120.另外,本实施形态的摇动型减速装置1中,将需要高加工精度的摇动环状槽33及岁差运动环状槽34两者,形成于岁差运动体30的球状部31的表面。在形成此种槽的情况下,若为球状部31的表面,则能够轻易地进行通过自动加工机的加工工具的加工。
121.另外,即便在缩小球状部31的直径的情况下,亦能够轻易地进行通过自动加工机的加工工具的加工。在例如摇动体40的内周面进行此种槽的加工的情况下,由于成为在工具并未干涉摇动体40的范围内的加工,因此加工区域变狭窄,会有进行小型化时加工困难的情况。本实施形态中,通过在球状部31的表面进行槽的加工,即便在小型化的情况下,亦能够进行精密的加工。
122.另一方面,通过在球状部31的表面设置槽,在与这些槽抵接的摇动用球体40b及岁差运动球体16b可能会产生弹性体所导致的赋能力。岁差运动体30经由板弹簧16d而由安装在底板13的岁差运动支撑体16及岁差运动球体16b所支撑。另外,摇动体40经由板弹簧17d而由安装在顶板14的摇动支撑体17及摇动导引球体17b所支撑。
123.因此,即便在对摇动型减速装置1施加高负荷,且对各构件施加高荷重的情况下,
由于在岁差运动体30及摇动体40所产生的荷重,分别被板弹簧17d及板弹簧16d所吸收,因此能够使对各构件的影响成为最小限度。因此,能够实现摇动型减速装置1的耐荷重性及耐久性的提升。
124.接着,参照图10,对本实施形态的摇动型减速装置的变形例进行说明。图10为表示作为变形例的摇动型减速装置1a的岁差运动支撑体16e的图。图10中的岁差运动支撑体16e为在本体10a的底板13b朝向岁差运动体30的球状部31的中心31c延伸的圆柱状的构件。此外,于变形例的说明中,针对与上述实施形态具有相同结构的构件,赋予相同的符号并省略详细说明。
125.该变形例中的岁差运动支撑体16e的基本形状为圆柱状,在其前端部旋转自如地保持有岁差运动球体16b。该岁差运动支撑体16e与上述实施形态相同,经由板弹簧安装在底板13b,且为在轴方向能够移动地安装在底板13b。或者,亦可通过螺旋弹簧等其他赋能单元,将岁差运动支撑体16e赋能至岁差运动环状槽34。
126.由于该变形例中的岁差运动支撑体16e成为上述结构,因此即便在从输出轴50对岁差运动体30施加较强的荷重的情况下,通过各岁差运动支撑体16e及赋能单元,能够均等地分散且吸收对岁差运动体30的荷重。
127.此外,于上述各实施形态中,将输入轴20的输入轴心20a与岁差运动体30的岁差轴心30a的角度α设为10
°
,然而并未限定于此,只要为0
°
《α≦20
°
的范围,则能够根据装置整体的大小或减速比来进行各种变更。
128.另外,输入轴心20a与输出轴心50a的交叉角在上述实施形态中为设定成90
°
,然而并未限定于此,交叉角能够在正负20
°
的范围内变更。另外,针对设于岁差运动体30的球状部31的表面的摇动环状槽33及岁差运动环状槽34的数量与形状,亦能够根据球状部31的大小等适当变更。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。