1.本发明涉及物体识别装置和物体识别方法。
背景技术:
2.以往,已知一种物体识别装置,其将传感器检测到物体时的检测点的位置与物体的形状模型相匹配,并基于物体的形状模型中的检测点的位置,确定形成物体航线的航线点的位置(例如,参照专利文献1)。现有技术文献专利文献
3.专利文献1:日本专利特开2017-215161号公报
技术实现要素:
发明所要解决的技术问题
4.已知,在专利文献1所记载的现有的物体识别装置中,根据检测点的位置是否包含在以物体的移动目的地的位置为中心而设定的相关范围内,来判定物体的移动目的地的位置与检测点的位置是否相关。
5.但是,在专利文献1所示的现有的物体识别装置中,根据传感器的分辨率,有时无法正确地设定相关范围。这种情况下,物体的移动目的地的位置和检测点的位置有无相关的判断可能会产生错误。因此,表示物体航线点的位置的物体航线数据的精度会降低。
6.本发明的目的是为了解决上述问题,获取能够提高物体航线数据的精度的物体识别装置和物体识别方法。用于解决技术问题的技术手段
7.本发明的物体识别装置包括:预测处理部,该预测处理部基于通过多个物体中的至少一个所述物体作为跟踪对象进行移动而形成的轨迹,将所述跟踪对象的移动目的地的位置预测为对所述跟踪对象进行建模后得到的物体模型上的预测位置;临时设定部,该临时设定部基于检测所述跟踪对象的传感器的规格来设定所述物体模型上的至少一个候补点的位置;以及相关处理部,该相关处理部基于所述候补点的位置和所述预测位置确定所述物体模型上的基准位置,并基于以所述物体模型上的所述基准位置为基准而设定的相关范围与所述传感器检测到多个所述物体中的至少一个所述物体时的检测点之间的位置关系,判定所述检测点的位置与所述预测位置之间是否有相关性。发明效果
8.根据本发明的物体识别装置,能提高物体航线数据的精度。
附图说明
附图说明
9.图1是示出本实施方式的车辆控制系统的功能结构例的框图。
图2是示出图1的传感器和物体之间的相对位置关系的一个示例的图。图3是表示成为图2的车辆中的检测点的位置的第一候补的候补点的一个示例的图。图4是表示成为图2的车辆中的检测点的位置的第二候补的候补点的一个示例的图。图5是表示在车辆中的检测点的位置的另一候补的候补点的一个示例的图。图6是表示n为自然数时图3至图5的候补点的可靠度的设定例的图。图7是示出图1的预测数据的一个示例的图。图8是表示基于图7的预测数据的预测位置和候补点而确定的基准位置的一个示例的图。图9是示出以图8的基准位置为基准而设定的相关范围的第一设定例的图。图10是示出以图8的基准位置为基准而设定的相关范围的第二设定例的图。图11是示出以图8的基准位置为基准而设定的相关范围的第三设定例的图。图12是表示在图7的航线数据中还包含方向的一个示例的图。图13是表示在图7的航线数据中还包含高度的一个示例的图。图14是示出图7的航线数据中还包括上端位置和下端位置的一个示例的图。图15是示意性地说明以图2的检测点的位置为中心的相关判定对象的判定对象物体模型与以图8的预测位置为中心的跟踪对象的物体模型的重叠的图。图16是说明由图1的物体识别装置进行的处理的流程图。图17是说明图16的步骤s19中的相关关联处理的流程图。图18是说明图17的步骤s38中的相关范围设定处理的流程图。图19是说明图16的步骤s20中的相关判定处理的流程图。图20是说明图19的步骤s75中的合理性判定处理的流程图。图21是说明硬件结构例的图。图22是说明其他硬件结构例的图。
具体实施方式
10.图1是示出本实施方式的车辆控制系统的功能结构例的框图。如图1所示,车辆控制系统包括多个车外信息传感器1、多个车辆信息传感器2、物体识别装置3、通知控制装置4和车辆控制装置5。
11.多个车外信息传感器1中的每一个被安装在本车辆上。例如,在多个车外信息传感器1中,一部分车外信息传感器1单独安装在前保险杠内部、后保险杠内部和挡风玻璃的车厢侧。安装在前保险杠内部的车外信息传感器1以位于车辆c前方或侧面的物体作为观测对象。安装在后保险杠内部的车外信息传感器1以位于车辆c的后方或侧面的物体作为观测对象。
12.此外,安装在挡风玻璃的车厢侧的车外信息传感器1配置在内后视镜旁边。安装在前挡风玻璃的车厢侧中的内后视镜旁边的车外信息传感器1以位于车辆c前方的物体作为观测对象。
13.由此,安装在本车辆上的多个车外信息传感器1中的每一个是能够获取关于车辆
周围的物体的信息作为检测数据dd的传感器。由多个车外信息传感器1中的每一个获取到的关于车辆周围的物体的各个检测数据dd被集成并生成为检测数据dd。检测数据dd生成为能够提供给物体识别装置3的数据结构。检测数据dd包括与至少一个检测点dp的位置p相关的至少一个信息。
14.车外信息传感器1通过检测物体表面上的任意点作为检测点dp来观测物体。各个检测点dp表示在本车辆周围由车外信息传感器1观测到的物体中的各个点。例如,车外信息传感器1以光作为照射光照射本车辆的周围,并接收在物体的各个反射点反射的反射光。该各反射点相当于各检测点dp。
15.另外,根据车外信息传感器1的测量原理,与在检测点dp可观测的物体相关的信息不同。
16.作为车外信息传感器1的种类,可以使用毫米波雷达、激光传感器、超声波传感器、红外线传感器、摄像头等。另外,省略超声波传感器和红外线传感器的说明。
17.例如,毫米波雷达分别安装在本车辆的前保险杠和后保险杠上。毫米波雷达具有一个发送天线和多个接收天线。毫米波雷达能够测量与物体的距离和相对速度。例如,通过fmcw(frequency modulation continuous wave:调频连续波)方式测量与物体的距离和相对速度。因此,能够基于通过毫米波雷达测量到的与物体的距离和相对速度来观察检测点dp的位置p和检测点dp的速度v。
18.另外,在以下的说明中,检测点dp的速度v可以是本车辆与物体之间的相对速度,也可以是通过进一步利用gps且以绝对位置为基准的速度。
19.毫米波雷达可以测量物体的方位角。基于由多个接收天线中的每一个接收的各个电波的相位差测量物体的方位角。因此,能够基于由毫米波雷达测量到的物体的方位角观测物体的方向θ。
20.由此,利用毫米波雷达,除了检测点dp的位置p之外,还能够观测包含检测点dp的速度v和物体的方向θ在内的检测数据dd作为与物体相关的信息。检测点dp的位置p、检测点dp的速度v以及物体的方向θ中,检测点dp的速度v以及物体的方向θ分别是确定物体状态的动态要素。这些动态要素中的每一个都是物体确定要素。
21.另外,在fmcw方式的毫米波雷达中,当测量与物体的相对速度时,检测由发送信号的频率和接收信号的频率之间的多普勒效应引起的频移,即多普勒频率。由于该检测到的多普勒频率和与物体的相对速度成比例,因此能从多普勒频率推导出相对速度。
22.此外,毫米波雷达的速度分辨率是由多普勒频率的分辨率决定的。多普勒频率的分辨率为接收信号的观测时间的倒数。因此,观测时间越长,则多普勒频率的分辨率越高。因此,观测时间越长,则毫米波雷达的速度分辨率越高。
23.例如,当本车辆在高速公路上行驶时,与本车辆在普通道路上行驶的情况相比,将毫米波雷达的观测时间设定得较长。因此,能够将毫米波雷达的速度分辨率设定得较高。因此,本车辆在高速公路上行驶时,与本车辆在普通道路上行驶的情况相比,能更快地观测到速度的变化。由此,能更快地观测到本车辆周围的物体。
24.另外,毫米波雷达的距离分辨率被定义为将光速除以调制频带宽度来得到。因此,调制频带宽度越宽,则毫米波雷达的距离分辨率越高。
25.例如,当本车辆在停车场行驶的情况下,与本车辆在普通道路或高速公路行驶的
情况相比,将调制频带宽度设置得更宽。由此,能够将毫米波雷达的距离分辨率设定得较高。在将毫米波雷达的距离分辨率设定得较高的情况下,在本车辆周围,可检测到的最小单位距离变得更细,因此能将相邻排列的物体彼此区分开。
26.例如,当行人和车辆c作为本车辆周围的物体存在时,相对于从毫米波雷达照射的电磁波,成为反射强度较低的行人和反射强度较高的车辆c混合存在的状态。即使在这种状态下,从行人反射的电磁波也不会被车辆c反射的电磁波所吸收,因此能够检测到行人。
27.激光传感器例如安装在本车辆车顶的车外。作为激光传感器,例如,lidar(light detection and ranging:光探测和测距)安装在本车辆车顶的车外。lidar具有多个投光部、1个感光部和运算部。多个投光部在相对于本车辆的移动方向前方垂直的方向上以多个角度被配置。
28.lidar采用tof(time offlight:飞行时间)方式。具体而言,lidar中的多个投光部具有在预先设定的投光时间的期间内在水平方向上旋转并且放射状地对激光进行投光的功能。lidar中的感光部具有在预先设定的感光时间的期间内对来自物体的反射光进行感光的功能。lidar中的运算部具有求出成为多个投光部中的投光时刻、与感光部中的感光时刻之间的差分的往返时间的功能。lidar中的运算部具有基于该往返时间来求出与物体的距离的功能。
29.lidar也具有通过求出与物体的距离来测定与物体的方向的功能。因此,根据lidar测量到的测量结果能够观测到检测点dp的位置p、检测点dp的速度v以及物体的方向θ。
30.由此,利用lidar,除了检测点dp的位置p之外,还能够观测包含检测点dp的速度v和物体的方向θ在内的检测数据dd作为与物体相关的信息。如上述说明的那样,检测点dp的位置p、检测点dp的速度v以及物体的方向θ中,检测点dp的速度v以及物体的方向θ分别是物体确定要素。
31.另外,lidar的速度分辨率由构成激光的脉冲的发光间隔来决定。因此,构成激光的脉冲的发光间隔越短,则lidar的速度分辨率越高。
32.例如,在本车辆在高速公路上行驶的情况下,与本车辆在普通道路上行驶的情况相比,通过将构成从lidar照射的激光的脉冲的发光间隔设定得更短,能够将lidar的速度分辨率设定得更高。因此,在本车辆在高速公路上行驶的情况下,与本车辆在普通道路上行驶的情况相比,能够更快地观测到速度的变化。由此,能够更快地观测到本车辆周围的物体。
33.另外,lidar的距离分辨率由构成激光的脉冲宽度来决定。因此,构成激光的脉冲宽度越短,则lidar的距离分辨率越高。
34.例如,在本车辆在停车场中行驶的情况下,与本车辆在普通道路或高速公路上行驶的情况相比,将构成从lidar照射的激光的脉冲宽度设定得更短。由此,能将lidar的距离分辨率设定得较高。在将lidar的距离分辨率设定得较高的情况下,在本车辆周围,可检测到的最小单位距离变得更细,因此能够将相邻排列的物体彼此区分开。
35.例如,当行人和车辆c作为本车辆周围的物体存在时,相对于从lidar照射的激光,成为反射强度较低的行人和反射强度较高的车辆c混合存在的状态。即使在这种状态下,从行人反射的反射光也不会被从车辆c反射的反射光所吸收,因此能够检测到行人。
36.摄像头安装在前挡风玻璃的车厢侧的内后视镜旁边。例如,单眼摄像头被用作摄像头。单眼摄像头具有拍摄元件。拍摄元件例如是ccd(charge coupled device:电荷耦合器件)图像传感器或cmos(complementary metal oxide semiconductor:互补金属氧化物半导体)图像传感器。单眼摄像头以与拍摄元件的拍摄方向正交的二维空间中的像素水平为最小单位,连续地检测物体的有无和距离。例如,单眼摄像头包括例如向镜头添加红、绿和蓝的原色滤光镜而得的结构。通过这样的结构,能够根据使用原色滤光镜而分割的光线的视差求出距离。因此,根据由摄像头测量到的测量结果观测检测点dp的位置p、物体的宽度w和长度l。
37.如上所述,根据摄像头,除了检测点dp的位置p之外,还能够观测包含物体的宽度w和长度l在内的检测数据dd作为与物体相关的信息。在检测点dp的位置p、物体的宽度w和长度l中,物体的宽度w和长度l分别是确定物体大小的静态要素。这些静态要素中的每一个都是物体确定要素。
38.另外,摄像头除了单眼摄像头以外,还使用tof摄像头、立体摄像头、红外线摄像头等。
39.多个车辆信息传感器2具有检测车速、转向角和横摆率等本车辆的车辆信息作为本车辆数据cd的功能。本车辆数据cd生成为可提供给物体识别装置3的数据结构。
40.物体识别装置3包括时刻计测部31、数据接收部32、临时设定部33、预测处理部34、相关处理部35和更新处理部36。另外,时刻计测部31、数据接收部32、临时设定部33、预测处理部34、相关处理部35以及更新处理部36具有由执行存储在非易失性存储器或易失性存储器中的程序的cpu来实现的功能。
41.时刻计测部31具有计测物体识别装置3的时刻的功能。时刻计测部31生成计测到的时刻作为公共时刻ct。在能够提供给数据接收部32的数据结构中生成公共时刻ct。
42.数据接收部32具有输入接口的功能。
43.具体地,数据接收部32具有从各个车外信息传感器1接收检测数据dd的功能。各个检测数据dd由数据接收部32整合为检测数据dd。数据接收部32具有通过将由时刻计测部31生成的公共时刻ct作为关联时刻rt与检测数据dd相关联,从而生成检测数据dd
rt
的功能。检测数据dd
rt
被生成为能够分别提供给临时设定部33和相关处理部35的数据结构。
44.当从车外信息传感器1接收到检测数据dd时,数据接收部32判定为能够获取检测数据dd。数据接收部32将表示在相应的车外信息传感器1中发生故障的故障标志设定为0,并生成检测数据dd
rt
。
45.这里,当故障标志被设定为0时,表示相应的车外信息传感器1没有发生故障。另外,当故障标志被设定为1时,表示相应的车外信息传感器1发生故障。
46.另一方面,当未从车外信息传感器1接收到检测数据dd时,数据接收部32判定为无法获取检测数据dd,并将故障标志设定为1,生成检测数据dd
rt
。
47.当从车外信息传感器1接收到检测数据dd时,数据接收部32判定检测数据dd的合理性。当判定为检测数据dd不具有合理性时,数据接收部32判定为无法获取检测数据dd,并将表示与相应的车外信息传感器1相对应的检测数据dd不具有合理性的数据合理性标志设定为0。数据接收部32在判定为检测数据dd具有合理性的情况下,判定为能够获取检测数据dd,并将上述数据合理性标志设定为1。
48.这样,能通过参照故障标志和数据合理性标志中的至少一个来参照是否由数据接收部32获取到检测数据dd的判定结果。
49.此外,数据接收部32具有从车辆信息传感器2接收本车辆数据cd的功能。数据接收部32具有通过将由时刻计测部31生成的公共时刻ct作为关联时刻rt与本车辆数据cd相关联,从而生成本车辆数据cd
rt
的功能。本车辆数据cd
rt
被生成为能够提供给预测处理部34的数据结构。
50.临时设定部33具有基于将多个物体中的至少一个物体作为跟踪对象而检测到的车外信息传感器1的分辨率,设定通过对跟踪对象建模而得到的物体模型c
model1
中的至少一个候补点dph的位置hp的功能。临时设定部33具有生成包含至少一个候补点dph的位置hp在内的临时设定数据dh的功能。临时设定数据dh被生成为能够由临时设定部33提供给相关处理部35的数据结构。
51.车外信息传感器1的分辨率包含在车外信息传感器1的规格中。此外,车外信息传感器1的分辨率根据每个车外信息传感器1的规格而不同。根据车外信息传感器1的规格,确定与车外信息传感器1的动作设定相关的属性、以及与车外信息传感器1的配置状态相关的属性等。与车外信息传感器1的动作设定相关的属性是可观测的计测范围、计测范围的分辨率、采样频率等。与车外信息传感器1的配置状况相关的属性是车外信息传感器1的可能配置角度、车外信息传感器1的可耐久环境温度、车外信息传感器1与观测对象之间的可测量距离等。
52.预测处理部34具有从数据接收部32接收本车辆数据cd
rt
的功能。预测处理部34具有从更新处理部36接收航线数据td
rt-1
的功能。将航线数据td
rt-1
与航线数据td中的相当于本次关联时刻rt的前一个的前一个关联时刻rt、即关联时刻rt-1相关联。预测处理部34具有基于关联时刻rt的本车辆数据cd
rt
和关联时刻rt-1的航线数据td
rt-1
,通过公知的算法生成关联时刻rt的航线数据td
rt
的预测数据td
rtpred
的功能。公知的算法例如是像卡尔曼滤波器那样能够根据观测值推定按时间序列变化的物体的中心点的算法。
53.即,预测处理部34基于通过多个物体中的至少一个物体作为跟踪对象进行移动而形成的轨迹,将跟踪对象的移动目的地的位置预测为对跟踪对象进行建模后得到的物体模型c
model1
中的预测位置predp。预测位置predp包括在预测数据td
rtpred
中。预测位置predp是预测点pred的位置。预测点pred被设定在物体模型c
model1
的中心。因此,预测位置predp被设定在物体模型c
model1
的中心。
54.相关处理部35具有接收检测数据dd
rt
、包含候补点dph的位置hp的临时设定数据dh、航线数据td
rt
的预测数据td
rtpred
的功能。相关处理部35具有判定检测数据dd
rt
和航线数据td的预测数据td
rtpred
是否相关的功能。使用snn(simple nearest neighbor:简单近邻)算法、gnn(global nearest neighbor:全局最近邻)算法、jpda(joint probabilistic data association:联合概率数据关联)算法等判定检测数据dd
rt
和航线数据td
rt
的预测数据td
rtpred
之间有无相关关系。
55.即,相关处理部35基于候补点dph的位置hp和预测位置predp确定物体模型c
model1
中的基准位置bp。相关处理部35基于物体模型c
model1
中的基准位置bp设定相关范围ra。相关处理部35基于相关范围ra与当车外信息传感器1检测到多个物体中的至少一个物体时的检测点dp之间的位置关系,判定检测点dp的位置p与预测位置predp之间是否相关。
56.具体而言,基于马氏距离dm是否超过相关范围ra来判定检测数据dd
rt
与航线数据td
rt
的预测数据td
rtpred
有无相关关系。基于检测数据dd
rt
中包含的检测点dp的位置p和航线数据td
rt
的预测数据td
rtpred
中包含的预测位置predp导出马氏距离dm。导出的马氏距离dm不超过相关范围ra时,判定为检测数据dd
rt
和航线数据td
rt
的预测数据td
rtpred
相关。导出的马氏距离dm超过相关范围ra时,判定为检测数据dd
rt
和航线数据td
rt
的预测数据td
rtpred
不相关。
57.即,相关处理部35判定检测点dp的位置p与预测位置predp之间是否相关。
58.另外,在上述的一个示例中,作为用于与相关范围ra进行比较的指标,使用基于检测点dp的位置p和预测位置predp所导出的马氏距离dm,但不限于此。
59.如上述说明的那样,相关范围ra是基于基准位置bp来设定的。基于候补点dph的位置hp和预测位置predp确定基准位置bp。因此,预测位置predp与基准位置bp相关联。因此,可以基于检测点dp的位置p和基准位置bp导出马氏距离dm。
60.此外,用于与相关范围ra进行比较的指标可以不是马氏距离dm。可以利用检测点dp的位置p和基准位置bp之间的差分矢量的欧氏距离du。在这种情况下,基于欧氏距离du是否超过相关范围ra来判定检测数据dd
rt
与航线数据td
rt
的预测数据td
rtpred
有无相关关系。
61.即,相关处理部35基于检测点dp的位置p和基准位置bp之间的差分矢量的欧氏距离du以及基于检测点dp的位置p和基准位置bp得到的马氏距离dm中的任意一个是否超过相关范围ra,判定检测点dp的位置p和预测位置predp之间是否相关。
62.相关范围ra被设定为车外信息传感器1的可观察范围。车外信息传感器1中的可观察范围根据车外信息传感器1的种类而不同。因此,相关范围ra根据车外信息传感器1的种类而不同。
63.相关处理部35具有在检测数据dd
rt
和航线数据td
rt
的预测数据td
rtpred
相关的情况下,决定检测数据dd
rt
和航线数据td
rt
的预测数据td
rtpred
存在对应关系的功能。相关处理部35具有生成相关数据rd
rt
的功能,该相关数据rd
rt
是将检测数据dd
rt
、包含候补点dph的位置hp在内的临时设定数据dh、航线数据td
rt
的预测数据td
rtpred
和与所决定的对应关系相关的数据一起整合后得到的数据。相关数据rd
rt
被生成为能够由相关处理部35提供给更新处理部36的数据结构。
64.更新处理部36具有接收相关数据rd
rt
的功能。更新处理部36具有基于检测点dp的位置p和候补点dph的位置hp更新航线数据td
rt
的功能。航线数据td
rt
具体地通过最小二乘法、卡尔曼滤波器、粒子滤波器等跟踪处理进行更新。
65.通知控制装置4具有接收航线数据td
rt
的功能。通知控制装置4具有基于航线数据td
rt
生成通知数据的功能。通知数据是确定通知内容的数据,并且以对应于输出目的地的设备的形式来生成。通知控制装置4通过将通知数据输出到未图示的显示器,从而使显示器通知通知数据的内容。由此,通知数据的内容以视觉方式通知给在车厢内的驾驶员。通知控制装置4通过将通知数据输出到未图示的扬声器,从而使扬声器通知通知数据的内容。由此,通知数据的内容以听觉方式通知给在车厢内的驾驶员。
66.车辆控制装置5具有接收由更新处理部36输出的航线数据td
rt
的功能。车辆控制装置5具有基于航线数据td
rt
控制本车辆的动作的功能。车辆控制装置5基于航线数据td
rt
控制本车辆的动作,以使得本车辆避开物体。
67.图2是示出图1的传感器和物体之间的相对位置关系的一个示例的图。
68.这里,将正面观察车外信息传感器1时的位于中央的点设为原点o。将通过原点o的左右方向的水平轴设为ys轴。ys轴中,当正面观察车外信息传感器1时,将右方向设定为正方向。将通过原点o的上下方向的垂直轴设为zs轴。zs轴中,当正面观察车外信息传感器1时,将上方向设定为正方向。将通过原点o并且与ys轴和zs轴正交的前后方向的轴设为xs轴。xs轴中,将车外信息传感器1的前方定为正方向。
69.如图2中的虚线所示,车外信息传感器1的可观测范围被划分为多个假想的分辨率单元。基于车外信息传感器1的分辨率确定分辨率单元。分辨率单元通过根据车外信息传感器1的角度分辨率和距离分辨率分割车外信息传感器1的可观察范围来得到。如上所说明的那样,车外信息传感器1的角度分辨率和距离分辨率根据车外信息传感器1的测量原理而不同。
70.各个分辨率单元由最小检测范围mr(i,j)确定。这里,i沿着以原点o为基准的周向确定分辨率单元的位置。j沿着以原点o为基准的同心圆的径向确定分辨率单元的位置。因此,i的数量根据车外信息传感器1的角度分辨率而变动。因此,车外信息传感器1的角度分辨率越高,则i的最大数量增加。另一方面,j的数量根据车外信息传感器1的距离分辨率而变动。因此,车外信息传感器1的距离分辨率越高,则j的最大数量增加。关于i的正负符号,将以xs轴为基准的顺时针方向设为正的周向,将以xs轴为基准的逆时针方向设为负的周向。
71.当车外信息传感器1检测到车辆ca时,检测点dp(ca)包含在最小检测范围mr(3,3)中。最小检测范围mr(3,3)被设定为仅包括车辆ca的后方左侧的大小。因此,由于确定检测点dp(ca)的位置p与车辆ca之间的位置关系,所以车辆ca上的检测点dp(ca)的位置p被确定在车辆ca的后方左侧。另外,由于检测点dp(ca)包含在最小检测范围mr(3,3)中,因此检测点dp(ca)相对于车外信息传感器1的位置p被确定为从车外信息传感器1到车辆ca的距离最短的最近点的位置p。
72.另一方面,当车外信息传感器1检测到车辆cb时,检测点dp(cb)包含在最小检测范围mr(2,7)中。若沿着以原点o为基准的同心圆的径向进行比较,则与最小检测范围mr(3,3)相比,最小检测范围mr(2,7)远离原点o。最小检测范围mr(i,j)、即分辨率单元沿着同心圆的径向越远离原点o,则车外信息传感器1的角度分辨率越低。因此,最小检测范围mr(2,7)中的车外信息传感器1的角度分辨率低于最小检测范围mr(3,3)中的车外信息传感器1的角度分辨率。
73.此外,最小检测范围mr(2,7)被设定为包含车辆cb的整个后方的大小。因此,无法确定检测点dp(cb)的位置p是在车辆cb的整个后方中的哪个位置p。因此,无法确定检测点dp(cb)的位置p和车辆cb之间的位置关系。由此,无法确定车辆cb上的检测点dp(cb)的位置p。
74.因此,对用于确定车辆ca上的检测点dp(ca)的位置p以及车辆cb上的检测点dp(cb)的位置p的处理进行说明。
75.图3是表示成为图2的车辆ca上的检测点dp(ca)的位置p的第1候补的候补点dph(1)的一个示例的图。当车外信息传感器1检测到车辆ca作为物体时,检测点dp(ca)包含在最小检测范围mr(3,3)中。最小检测范围mr(3,3)被设定为仅包含车辆ca的后方左侧的大
小。因此,如上述说明的那样,假定最近点作为车辆ca上的检测点dp(ca)的位置p。假定最近点作为车辆ca上的检测点dp(ca)的位置p时,候补点dph(1)的位置hp成为车辆ca上的检测点dp(ca)的位置p的第1候补。
76.换句话说,在图3的一个示例中,候补点dph(1)的位置hp是车辆ca上的检测点dp(ca)的位置p的第一候补。
77.图4是表示成为图2的车辆cb上的检测点dp(cb)的位置p的第2候补的候补点dph(2)的一个示例的图。当车外信息传感器1检测到车辆cb作为物体时,检测点dp(cb)包含在最小检测范围mr(2,7)中。最小检测范围mr(2,7)被设定为包含车辆cb的整个后方的大小。因此,如上述说明的那样,无法确定检测点dp(cb)的位置p是车辆cb的整个后方中的哪个位置p。在无法确定检测点dp(cb)的位置p是车辆cb的整个后方中的哪个位置p时,候补点dph(2)的位置hp成为车辆cb上的检测点dp(cb)的位置p的第2候补。候补点dph(2)的位置hp假定为车辆cb的后部的后面中央点。后面中央点是正面观察车辆cb的后部时位于中央的点。
78.换句话说,在图4的一个示例中,候补点dph(2)的位置hp是车辆cb上的检测点dp(cb)的位置p的第二候补。
79.图5是表示作为车辆cc中的检测点dp(cc)的位置p的另一个候补的候补点dph(3)的一个示例的图。当车外信息传感器1检测到车辆cc作为物体时,检测点dp(cc)包含在最小检测范围mr(-1,7)中。例如,与最小检测范围mr(-1,3)相比,最小检测范围mr(-1,7)更远离原点o。因此,最小检测范围mr(-1,7)中的车外信息传感器1的角度分辨率低于最小检测范围mr(-1,3)中的车外信息传感器1的角度分辨率。
80.具体来说,最小检测范围mr(-1,7)被设定为包含车辆cc的整个前方的大小。因此,无法确定检测点dp(cc)的位置p是在车辆cb的整个前方中的哪个位置p。在无法确定检测点dp(cc)的位置p是车辆cc的整个前方中的哪个位置p时,候补点dph(3)的位置hp成为车辆cc上的检测点dp(cc)的位置p的另一个候补。候补点dph(3)的位置hp假定为车辆cc的前部的前面中央点。前表面中央点是正面观察车辆cc的前部时位于中央的点。
81.换句话说,在图5的一个示例中,候补点dph(3)的位置hp是车辆cc上的检测点dp(cc)的位置p的另一个候补。
82.参照图3和图4,当车外信息传感器1是监视本车辆前方的毫米波雷达时,候补点dph(1)的位置hp成为车辆ca上的检测点dp(ca)的位置p的候补。另外,候补点dph(2)的位置hp成为车辆cb上的检测点dp(cb)的位置p的候补。
83.另外,参照图4,若车外信息传感器1是监视本车辆前方的摄像头,则候补点dph(2)的位置hp成为车辆cb上的检测点dp(cb)的位置p的候补。
84.参照图3和图5时,若车外信息传感器1是监视本车辆后方的毫米波雷达,则候补点dph(1)的位置hp成为车辆ca上的检测点dp(ca)的位置p的候补。另外,候补点dph(3)的位置hp成为车辆cc上的检测点dp(cc)的位置p的候补。
85.这样,在检测点dp的位置p的候补点dph有多个的情况下,无法确定车辆ca上的检测点dp(ca)、车辆cb上的检测点dp(cb)以及车辆cc上的检测点dp(cc)的各个位置p。
86.因此,对从多个候补点dph(n)中选择并采用一个候补点dph的处理进行说明。另外,在以下的说明中,在对车辆ca、车辆cb及车辆cc进行统称时,称为车辆c。在对检测点dp(ca)、检测点dp(cb)和检测点dp(cc)进行统称时,称为检测点dp(c)。
87.图6是表示将n设为自然数时从图3至图5的候补点dph(n)的可靠度dor(n)的设定例的图。在图6的一个示例中,对于可靠度dor(n),设定0以上1以下的实数。如上述说明的那样,若车外信息传感器1是监视本车辆前方的毫米波雷达,则候补点dph(1)和候补点dph(2)成为车辆c上的检测点dp(c)的候补。
88.因此,通过比较针对候补点dph(1)的可靠度dor(1)和针对候补点dph(2)的可靠度dor(2),选择候补点dph(1)和候补点dph(2)中的任意一个,设定为车辆c上的检测点dp(c)的位置p的候补。由此,采用候补点dph(1)和候补点dph(2)中的任意一个。
89.具体地,如上述说明的那样,分辨率单元沿着同心圆的径向越远离原点o,则车外信息传感器1的角度分辨率越低。换句话说,分辨率单元沿着同心圆的径向越接近原点o,则车外信息传感器1的角度分辨率越高。
90.因此,如果从车外信息传感器1到检测点dp(c)的距离较近,则车辆c的后部不会被埋在分辨率单元中。因此,如果从车外信息传感器1到检测点dp(c)的距离较近,则可靠度dor较高。
91.换句话说,基于从车外信息传感器1到检测点dp的位置p的距离来求出候补点dph的可靠度dor。此外,基于从车外信息传感器1到基准位置bp的距离求出候补点dph的可靠度dor。即,相关处理部35基于从车外信息传感器1到检测点dp的位置p和基准位置bp中的至少一个的距离来求出各个可靠度dor。
92.因此,当从车外信息传感器1到检测点dp(c)的距离小于图6的判定阈值距离d
th1
时,针对候补点dph(1)的可靠度dor(1)被设定为1,针对候补点dph(2)的可靠度dor(2)被设定为0。在此情况下,可靠度dor(1)比可靠度dor(2)的可靠度dor更高,因此选择可靠度dor(1)。当选择并设定可靠度dor(1)时,采用与可靠度dor(1)相对应的候补点dph(1)。车辆c上的候补点dph(1)的位置hp是车辆c上的最近点的位置p。
93.因此,根据被采用的候补点dph(1)的位置hp,假定车辆c上的检测点dp(c)的位置p位于车辆c上的最近点的位置p。
94.换句话说,在从车外信息传感器1到检测点dp(c)的距离小于图6的判定阈值距离d
th1
的情况下,在多个候补点dph(n)中,采用候补点dph(1)的位置hp作为车辆c上的检测点dp(c)的位置p的候补。由此,假定车辆c上的检测点dp(c)的位置p位于车辆c上的最近点的位置p。
95.另一方面,如果从车外信息传感器1到检测点dp(c)的距离较远,则车辆c的后部也会埋在分辨率单元中。因此,如果从车外信息传感器1到检测点dp(c)的距离较远,则可靠度dor较低。
96.因此,当从车外信息传感器1到检测点dp(c)的距离为图6的判定阈值距离d
th2
以上时,针对候补点dph(1)的可靠度dor(1)被设定为0,针对候补点dph(2)的可靠度dor(2)被设定为1。在此情况下,可靠度dor(2)比可靠度dor(1)的可靠度dor更高,因此选择可靠度dor(2)。当选择并设定可靠度dor(2)时,采用与可靠度dor(2)相对应的候补点dph(2)。车辆c上的候补点dph(2)的位置hp是车辆c上的后面中央点的位置p。
97.因此,根据被采用的候补点dph(2)的位置hp,假定车辆c上的检测点dp(c)的位置p位于车辆c上的后面中央点的位置p。
98.换句话说,在从车外信息传感器1到检测点dp(c)的距离为图6的判定阈值距离d
th2
以上的情况下,在多个候补点dph(n)中,采用候补点dph(2)的位置hp作为车辆c上的检测点dp(c)的位置p的候补。由此,假定车辆c上的检测点dp(c)的位置p位于车辆c上的后面中央点的位置p。
99.根据以上说明,相关处理部35在车辆c上的多个候补点dph(n)的位置hp中,采用可靠度dor(n)最高的候补点dph(n)。
100.另外,图6的判定阈值距离d
th1
被设定为包含沿着同心圆的径向的距原点o的距离中的、图3或图5的最小检测范围mr(3,3)的距离。也就是说,图6的判定阈值距离d
th1
被设定为包含沿着同心圆的径向的距原点o的距离中的、图3、图4以及图5的最小检测范围mr(i,3)的距离。
101.另一方面,图6的判定阈值距离d
th2
被设定为包含沿着同心圆的径向的距原点o的距离中的、图4的最小检测范围mr(2,7)的距离。也就是说,图6的判定阈值距离d
th2
被设定为包含沿着同心圆的径向的距原点o的距离中的、图3、图4以及图5的最小检测范围mr(i,7)的距离。
102.换句话说,判定阈值距离d
th2
被设定为比判定阈值距离d
th1
更远离原点o的距离。
103.具体而言,可靠度dor(1)在小于判定阈值距离d
th1
时被设定为1。可靠度dor(1)在判定阈值距离d
th1
以上时开始下降。可靠度dor(1)在判定阈值距离dt
h2
以上时被设定为0。
104.另一方面,可靠度dor(2)在小于判定阈值距离d
th1
时被设定为0。可靠度dor(2)在判定阈值距离d
th1
以上时开始上升。可靠度dor(2)在判定阈值距离d
th2
以上时被设定为1。
105.由此,可靠度dor(1)及可靠度dor(2)分别被设定为在小于判定阈值距离d
th1
和判定阈值距离d
th2
以上时示出相互相反的趋势。
106.基于车外信息传感器1的距离分辨率与角度分辨率的比率来分别决定判定阈值距离dth1以上和判定阈值距离dth2以下时的可靠度dor(1)和可靠度dor(2)。
107.图7是示出图1的预测数据td
rtpred
的一个示例的图。
108.预测数据td
rtpred
包含以作为物体的车辆c为跟踪对象进行建模而得的物体模型c
model1
中的预测点pred的预测位置predp、预测点pred的速度predv、物体模型c
model1
的宽度w以及长度l这4个。
109.物体模型c
model1
中的预测点pred的预测位置predp、预测点pred的速度predv、物体模型c
model1
的宽度w和长度l这4个中,预测点pred的速度predv、物体模型c
model1
的宽度w和长度l这3个是物体确定要素。
110.物体确定要素确定物体模型c
model1
的状态和大小中的至少一个。
111.物体模型c
modell
中的预测点pred被设定为物体模型c
model1
的中心点。因此,预测点pred的预测位置predp位于物体模型c
model1
的中心。
112.物体模型c
model1
中的预测点pred的预测位置predp以及预测点pred的速度predv表示通过毫米波雷达或lidar可观测到的物体的状态。物体模型c
model1
的宽度w及长度l表示通过摄像头可观测到的物体的大小。
113.因此,预测数据td
rtpred
是通过整合多个不同种类的车外信息传感器1的观测结果而形成的数据。例如,预测数据td
rtpred
被构成为td
rtpred
(predp,predv,l,w)这样的矢量数据。
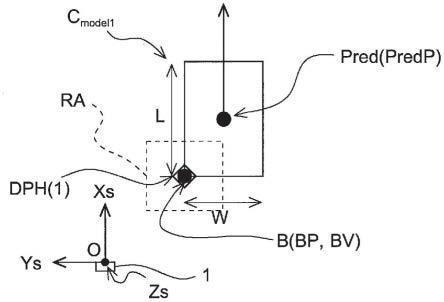
114.图8是示出基于图7的预测数据td
rtpred
的预测位置predp和候补点dph(1)确定的基
准位置bp的一个示例的图。
115.如上述说明的那样,预测位置predp是预测点pred的位置。预测点pred被设定在物体模型c
model1
的中心点。另外,候补点dph(1)的位置hp是物体模型c
model1
中的最近点的位置。
116.另外,如上述说明的那样,预测数据td
rtpred
包含物体模型c
model1
的预测点pred的预测位置predp、预测点pred的速度predv、物体模型c
model1
的宽度w和长度l这4个数据。
117.在采用候补点dph(1)作为可靠度dor(n)最高的候补点dph(n)时,采用物体模型c
model1
中的最近点作为候补点dph。最近点的位置被确定为基准点b的基准位置bp。
118.因此,物体模型c
model1
中的基准位置bp被设定为在ys轴方向上将宽度w的1/2与预测位置predp相加后得到的位置。此外,物体模型c
model1
中的基准位置bp被设定为在xs轴方向上将预测位置predp减去长度l的1/2后得到的位置。
119.即,相关处理部35基于确定物体模型c
model1
的状态和大小中的至少一个的物体确定要素,来确定物体模型c
model1
中的基准位置bp。
120.具体地说,相关处理部35在从车外信息传感器1获取物体模型c
model1
的宽度w和长度l中的至少一个作为物体确定要素时,除了预测位置predp和候补点dph之外,还能获取物体确定要素。
121.在这种情况下,相关处理部35基于预测位置predp、候补点dph和获取到的物体确定要素,确定在本次的关联时刻rt的相关范围ra的基准位置bp。
122.相关处理部35在无法从车外信息传感器1获取物体模型c
model1
的宽度w和长度l中的至少一个作为物体确定要素时,虽然能获取预测位置predp和候补点dph,但无法获取物体确定要素。
123.在这种情况下,相关处理部35在与物体模型c
model1
的宽度w和长度l分别相对应地单独预先设定的设定值中,确定与无法从车外信息传感器1获取的物体确定要素相对应的设定值。
124.相关处理部35基于确定的设定值确定无法从车外信息传感器1获取的物体确定要素的值。即,相关处理部35基于预测位置predp、候补点dph和设定值,确定在本次的关联时刻rt的相关范围ra的基准位置bp。
125.有时相关处理部35也无法从车外信息传感器1获取物体模型c
model1
的宽度w和长度l中的至少一个来作为物体确定要素,并且不与物体模型c
model1
的宽度w和长度l分别相对应地单独预先设定设定值。
126.在这种情况下,相关处理部35基于预测位置predp、候补点dph,确定在本次的关联时刻rt的相关范围ra的基准位置bp。具体而言,相关处理部35基于预测位置predp与候补点dph之间的差分矢量,确定在本次的关联时刻rt的相关范围ra的基准位置bp。
127.接着,对物体确定要素中包含物体模型c
model1
的宽度w、长度l以及方向θ中的至少一个的情况进行说明。
128.另外,在能够从车外信息传感器1获取物体模型c
model1
的宽度w、长度l和方向θ中的至少一个作为物体确定要素时,相关处理部35基于预测位置predp、候补点dph和获取到的物体确定要素,确定在本次关联时刻rt的相关范围ra的基准位置bp。
129.相关处理部35在无法从车外信息传感器1获取物体模型c
model1
的宽度w、长度l以及方向θ中的至少一个作为物体确定要素时,虽然能获取预测位置predp和候补点dph,但无法
获取物体确定要素。
130.在这种情况下,相关处理部35在与物体模型c
model1
的宽度w、长度l以及方向θ分别相对应地单独预先设定的设定值中,确定与无法从车外信息传感器1获取的物体确定要素相对应的设定值。
131.相关处理部35基于所确定的设定值来确定无法从车外信息传感器1获取的物体确定要素的值。即,相关处理部35基于预测位置predp、候补点dph和设定值,确定在本次的关联时刻rt的相关范围ra的基准位置bp。
132.有时相关处理部35也无法从车外信息传感器1获取物体模型c
model1
的宽度w、长度l以及方向θ中的至少一个作为物体确定要素,并且不与物体模型c
model1
的宽度w、长度l以及方向θ分别相对应地单独预先设定设定值。
133.在这种情况下,相关处理部35基于预测位置predp、候补点dph,确定在本次的关联时刻rt的相关范围ra的基准位置bp。具体而言,相关处理部35基于预测位置predp与候补点dph之间的差分矢量,确定在本次的关联时刻rt的相关范围ra的基准位置bp。
134.接着,对物体确定要素中包含物体模型c
model1
的宽度w、长度l、方向θ以及高度h中的至少一个的情况进行说明。
135.相关处理部35在无法从车外信息传感器1获取物体模型c
model1
的宽度w、长度l、方向θ以及高度h中的至少一个作为物体确定要素时,虽然能获取预测位置predp和候补点dph,但无法获取物体确定要素。
136.在这种情况下,相关处理部35在与物体模型c
model1
的宽度w、长度l、方向θ以及高度h分别相对应地单独预先设定的设定值中,确定与无法从车外信息传感器1获取的物体确定要素相对应的设定值。
137.相关处理部35基于确定的设定值确定无法从车外信息传感器1获取的物体确定要素的值。即,相关处理部35基于预测位置predp、候补点dph和设定值,确定在本次的关联时刻rt的相关范围ra的基准位置bp。
138.有时相关处理部35也无法从车外信息传感器1获取物体模型c
model1
的宽度w、长度l、方向θ以及高度h中的至少一个作为物体确定要素,并且不与物体模型c
model1
的宽度w、长度l、方向θ以及高度h分别相对应地单独预先设定设定值。
139.在这种情况下,相关处理部35基于预测位置predp、候补点dph,确定在本次的关联时刻rt的相关范围ra的基准位置bp。具体而言,相关处理部35基于预测位置predp与候补点dph之间的差分矢量,确定在本次的关联时刻rt的相关范围ra的基准位置bp。
140.接着,对物体确定要素中包含物体模型c
model1
的宽度w、长度l、方向θ、上端zh的位置以及下端z
l
的位置中的至少一个的情况进行说明。
141.相关处理部35在无法从车外信息传感器1获取物体模型c
model1
的宽度w、长度l、方向θ、上端zh的位置以及下端z
l
的位置中的至少一个作为物体确定要素时,虽然能获取预测位置predp和候补点dph,但无法获取物体确定要素。
142.在这种情况下,相关处理部35在与物体模型c
model1
的宽度w、长度l、方向θ、上端zh的位置以及下端z
l
的位置分别相对应地单独预先设定的设定值中,确定与无法从车外信息传感器1获取的物体确定要素相对应的设定值。
143.相关处理部35基于所确定的设定值来确定无法从车外信息传感器1获取的物体确定要素的值。即,相关处理部35基于预测位置predp、候补点dph和设定值,确定在本次的关联时刻rt的相关范围ra的基准位置bp。
144.有时相关处理部35也无法从车外信息传感器1获取物体模型c
model1
的宽度w、长度l、方向θ、上端zh的位置以及下端z
l
的位置中的至少一个作为物体确定要素,并且不与物体模型c
model1
的宽度w、长度l、方向θ、上端zh的位置以及下端z
l
的位置分别相对应地单独预先设定设定值。
145.在这种情况下,相关处理部35基于预测位置predp、候补点dph,确定在本次的关联时刻rt的相关范围ra的基准位置bp。具体而言,相关处理部35基于预测位置predp与候补点dph之间的差分矢量,确定在本次的关联时刻rt的相关范围ra的基准位置bp。
146.以上,对采用候补点dph(1)作为可靠度dor(n)最高的候补点dph(n)的情况进行了说明。但是,也可以不使用可靠度dor(n)最高的候补点dph(n)的位置hp,而使用对多个候补点dph(n)的各个位置p利用可靠度dor(n)加权平均后得到的候补点dph(n)的位置hp。
147.具体地说,相关处理部35通过根据各个可靠度dor对物体中的多个候补点dph的各个位置hp进行加权平均,从而确定物体模型c
model1
中的基准位置bp。
148.总而言之,当物体模型c
model1
中候补点dph(n)的数量为多个时,相关处理部35基于多个候补点dph(n)中的每一个的可靠度dor(n)和多个候补点dph(n)中的每一个的位置hp来确定基准位置bp。
149.如以上的说明那样,基于所确定的基准位置bp来设定相关范围ra。
150.例如,沿xs轴方向的位置分别被设定为相对于基准位置bp为 1[m]和-1[m]。
[0151]
沿ys轴方向的位置分别被设定相对于基准位置bp为 1[m]和-1[m]。
[0152]
此外,沿xs轴方向的速度分别被设定为相对于位于基准位置bp的基准点b的基准速度bv为 3[km/h]和-3[km/h]。
[0153]
此外,沿ys轴方向的速度分别被设定为相对于位于基准位置bp的基准点b的基准速度bv为 3[km/h]和-3[km/h]。
[0154]
在以下说明中,将沿xs轴方向的位置称为xs轴位置,将沿ys轴方向的位置称为ys轴位置,将沿xs轴方向的速度称为xs轴速度,将沿ys轴方向的速度称为ys轴速度。
[0155]
图9是示出以图8的基准位置bp为基准而设定的相关范围ra的第一设定例的图。
[0156]
相关范围ra的大小根据所采用的候补点dph而变化。当采用候补点dph(1)时,将基准位置bp设定为最近点的位置。这里,在位于基准位置bp的基准点b,将xs轴位置设为pnx,将ys轴位置设为pny,将xs轴速度设为vnx,将ys轴速度设为vny。
[0157]
此外,求出预先统计测量到的车外信息传感器1的检测误差的标准偏差。这里,将xs轴位置的检测误差的标准偏差设为σx,将ys轴位置的检测误差的标准偏差设为σy,将xs轴速度的检测误差的标准偏差设为σvx,将ys轴速度的检测误差的标准偏差设为σvy。
[0158]
因此,如图9所示,如下那样设定相关范围ra。xs轴位置:区间(pnx-σx,pnx σx)ys轴位置:区间(pny-σy,pny σy)xs轴速度:区间(vnx-σvx,vnx σvx)ys轴速度:区间(vny-σvy,vny σvy)
[0159]
图10是示出以图8的基准位置为基准而设定的相关范围ra的第二设定例的图。
[0160]
利用预测数据td
rtpred
中包含的物体模型c
model1
的宽度w和物体模型c
model1
的长度l。
[0161]
如图10所示,如下那样设定相关范围ra。xs轴位置:区间(pnx-σx,pnx σx l)ys轴位置:区间(pny-σy,pny σy w)xs轴速度:区间(vnx-σvx,vnx σvx)ys轴速度:区间(vny-σvy,vny σvy)
[0162]
图11是示出以图8的基准位置bp为基准而设定的相关范围ra的第三设定例的图。
[0163]
当采用候补点dph(2)时,将基准位置bp设定为预测位置predp。即,将基准点b设定为预测点pred。这里,在位于基准位置bp的基准点b,将xs轴位置设为pcx,将ys轴位置设为pcy,将xs轴速度设为vcx,将ys轴速度设为vcy。
[0164]
预先统计测量的车外信息传感器1的检测误差的标准偏差与上述情况相同。
[0165]
因此,如图11所示,如下那样设定相关范围ra。xs轴位置:区间(pcx-σx-l/2,pcx σx l/2)ys轴位置:区间(pcy-σy-w/2,pcy σy w/2)xs轴速度:区间(vcx-σvx,vcx σvx)ys轴速度:区间(vcy-σvy,vcy σvy)
[0166]
这里,可以将预先统计测量的车外信息传感器1的检测误差的标准偏差也反映到包含在预测数据td
rtpred
中的物体模型c
model1
的宽度w和长度l中。
[0167]
具体而言,对于预测数据td
rtpred
中包含的物体模型c
model1
的宽度w,将车外信息传感器1的检测误差的标准偏差设为σw。对于预测数据td
rtpred
中包含的物体模型c
model1
的长度l,将车外信息传感器1的检测误差的标准偏差设为σl。
[0168]
因此,在相关范围ra中,如下那样设定预测数据td
rtpred
中包含的物体模型c
model1
的宽度w和长度l。宽度w:区间(w-σw,w σw)长度l:区间(l-σ
l
,l σ
l
)
[0169]
另外,在预测数据td
rtpred
中包含方向θ的情况下,也可以如下那样设定相关范围ra中的方向。方向:与θ的差在45[deg]以内
[0170]
另外,也可以根据候补点dph的可靠度dor来调整相关范围ra的大小。
[0171]
具体地说,将车外信息传感器1的检测误差的标准偏差乘以(1-dor)来作为与可靠度dor相对应的系数。
[0172]
因此,如下那样设定相关范围ra。xs轴位置:区间(pnx-(2-dor)σx,pnx (2-dor)σx)ys轴位置:区间(pny-(2-dor)σy,pny (2-dor)σy)xs轴速度:区间(vnx-(2-dor)σvx,vnx (2-dor)σvx)ys轴速度:区间(vny-(2-dor)σvy,vny (2-dor)σvy)
[0173]
因此,可靠度dor越低,越能反映车外信息传感器1的检测误差的标准偏差的影响。由此,可靠度dor越低,相关范围ra的大小越大。
[0174]
换句话说,相关处理部35基于以预测位置predp为中心的物体模型c
model1
的大小和与物体模型c
model1
的大小相关的由车外信息传感器1引起的检测误差的统计量,设定相关范围ra。
[0175]
此外,相关处理部35根据多个可靠度dor(n)调整所设定的相关范围ra的大小。
[0176]
图12是示出在图7的航线数据td中还包含方向θ的一个示例的图。物体模型c
model1
的宽度w是与物体模型c
model1
的方向θ垂直的物体模型c
model1
的大小。物体模型c
model1
的长度l是与物体模型c
model1
的方向θ平行的物体模型c
model1
的大小。
[0177]
根据车外信息传感器1的测量原理,当可以获取物体模型c
model1
的方向θ时,追加物体模型c
model1
的方向θ作为检测数据dd的物体确定要素。根据车外信息传感器1的测量原理,当无法获取物体模型c
model1
的方向θ时,根据物体模型c
model1
、即物体的对地速度来改变方向θ的设定。
[0178]
当物体的对地速度不为零时,由于能够观测物体模型c
model1
的方向θ作为对地速度矢量的方向,因此可以获取。另一方面,当物体的对地速度为零、即物体是静止物体时,初始角度0[deg]作为预先设定的设定值被包含在临时设定数据dh中。
[0179]
图13是示出在图7的航线数据td中还包含高度h的一个示例的图。物体模型c
model1
的方向θ与路面rs平行,与物体模型c
model1
的高度h垂直。
[0180]
根据车外信息传感器1的测量原理,当可以获取物体模型c
model1
的高度h时,追加物体模型c
model1
的高度h作为检测数据dd的物体确定要素。根据车外信息传感器1的测量原理,当无法获取物体模型c
model1
的高度h时,初始高度1.5[m]作为预先设定的设定值被包含在临时设定数据dh中。
[0181]
图14是示出图7的航线数据td还包括上端zh的位置和下端z
l
的位置的一个示例的图。其中,设为上端zh的位置≥下端z
l
的位置。其中,当下端z
l
的位置大于0[m]时,判定为物体是如标示板或道路标识那样存在于物体上方的物体。
[0182]
当通过车外信息传感器1的测量原理可以获取上端zh的位置和下端z
l
的位置时,追加上端zh的位置和下端z
l
的位置作为检测数据dd的检测要素。当根据车外信息传感器1的测量原理无法获取上端zh的位置和下端z
l
的位置时,在临时设定数据dh中包含初始上端z
hdef
=1.5[m]和初始下端z
ldef
=0[m]作为预先设定的设定值。
[0183]
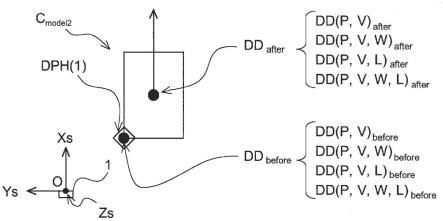
图15是示意性地说明以图2的检测点dp的位置p为中心的相关判定对象的判定对象物体模型c
model2
与以图8的预测位置predp为中心的跟踪对象的物体模型c
model1
的重叠的图。
[0184]
如图15所示,将判定对象物体模型c
model2
的面积so与物体模型c
model1
的面积st的重叠的比率so/st设为重叠率r。通过利用重叠率r和多个可靠度dor(n),评价检测点dp(c
model2
)的位置p和预测位置predp之间是否有相关性的判定结果是否妥当。
[0185]
判定对象物体模型c
model2
是通过对以检测点dp的位置p为中心的物体建模而生成的。另一方面,如上述说明的那样,物体模型c
model1
是通过对以预测位置predp为中心的物体进行建模而生成的。
[0186]
具体而言,若将α及β设为用0以上的实数表示的系数,将评价值设为γ1,则表示以下(1)所示的评价函数。α
×
(1-r) β
×
(1-dor)=γ1
ꢀꢀ
(1)
[0187]
因此,重叠率r越高,则包含α的项越小。另外,可靠度dor越高,则包含β的项就越小。由此,评价值γ1越小,则检测点dp(c
model2
)的位置p和预测位置predp之间是否有相关性的判定结果就越妥当。
[0188]
在这种情况下,例如将相关妥当性标志设定为1。
[0189]
另一方面,评价值γ1越大,则检测点dp(c
model2
)的位置p和预测位置predp之间是否有相关性的判定结果就越不妥当。
[0190]
在这种情况下,例如将相关妥当性标志设定为0。
[0191]
另外,通过设定针对评价值γ1的阈值th1,也可以将相关妥当性标志设定为1和0中的任意一个。
[0192]
例如,如果评价值γ1小于阈值th1,则将相关妥当性标志设定为1。另一方面,如果评价值γ1为阈值th1以上,则将相关妥当性标志设定为0。
[0193]
换句话说,相关处理部35求出通过对以检测点dp的位置p为中心的物体进行建模后得到的判定对象物体模型c
model2
与以预测位置predp为中心的物体模型c
model1
的重叠率r。相关处理部35基于重叠率r和多个可靠度dor(n)评价检测点dp的位置p和预测位置predp之间是否有相关性的判定结果是否妥当。
[0194]
在上记的说明中,已经说明了使用重叠率r的评价函数的一个示例,但不限于此。
[0195]
例如,采用可靠度dor最高的候补点dph,在与相关范围ra的比较中使用欧氏距离du。这里,若将α及β设为用0以上的实数表示的系数,将评价值设为γ2,则表示以下(2)所示的评价函数。α
×
du β
×
(1-dor)=γ2
ꢀꢀ
(2)
[0196]
因此,欧氏距离du越小,则包含α的项就越小。另外,可靠度dor越高,则包含β的项就越小。由此,评价值γ2越小,则能评价为检测点dp(c
model2
)的位置p和预测位置predp之间是否有相关性的判定结果越妥当。
[0197]
在这种情况下,例如将相关妥当性标志设定为1。
[0198]
另一方面,评价值γ2越大,则能评价为检测点dp(c
model2
)的位置p和预测位置predp之间是否有相关性的判定结果就越不妥当。
[0199]
在这种情况下,例如将相关妥当性标志设定为0。
[0200]
另外,通过设定针对评价值γ2的阈值th2,也可以将相关妥当性标志设定为1和0中的任意一个。
[0201]
例如,如果评价值γ2小于阈值th2,则将相关妥当性标志设定为1。另一方面,如果评价值γ2为阈值th2以上,则将相关妥当性标志设定为0。
[0202]
例如,采用可靠度dor最高的候补点dph,在与相关范围ra的比较中使用马氏距离dm。这里,若将α及β设为用0以上的实数表示的系数,将评价值设为γ3,则表示以下(3)所示的评价函数。α
×
dm β
×
(1-dor)=γ3
ꢀꢀ
(3)
[0203]
因此,马氏距离dm越小,则包含α的项就越小。另外,可靠度dor越高,则包含β的项就越小。由此,评价值γ3越小,则能评价为检测点dp(c
model2
)的位置p和预测位置predp之间是否有相关性的判定结果越妥当。
[0204]
在这种情况下,例如将相关妥当性标志设定为1。
[0205]
另一方面,评价值γ3越大,则能评价为检测点dp(c
model2
)的位置p和预测位置predp之间是否有相关性的判定结果就越不妥当。
[0206]
在这种情况下,例如将相关妥当性标志设定为0。
[0207]
另外,通过设定针对评价值γ3的阈值th3,也可以将相关妥当性标志设定为1和0中的任意一个。例如,如果评价值γ3小于阈值th3,则将相关妥当性标志设定为1。另一方面,如果评价值γ3为阈值th3以上,则将相关妥当性标志设定为0。
[0208]
另外,例如,根据各可靠度dor(n),采用对判定对象物体模型c
model2
中的多个候补点dph(n)的各个位置hp加权平均后的候补点dph,在与相关范围ra的比较中使用欧氏距离du。这里,若将α及β设为用0以上的实数表示的系数,将可靠度平均值设为dor
avr
,且将评价值设为γ4,则表示以下(4)所示的评价函数。α
×
du β
×
(1-dor
avr
)=γ4
ꢀꢀ
(4)
[0209]
因此,欧氏距离du越小,则包含α的项就越小。另外,可靠度平均值dor
avr
越高,则包含β的项就越小。由此,评价值γ4越小,则能评价为检测点dp(c
model2
)的位置p和预测位置predp之间是否有相关性的判定结果越妥当。
[0210]
在这种情况下,例如将相关妥当性标志设定为1。
[0211]
另一方面,评价值γ4越大,则能评价为检测点dp(c
model2
)的位置p和预测位置predp之间是否有相关性的判定结果就越不妥当。
[0212]
在这种情况下,例如将相关妥当性标志设定为0。
[0213]
另外,通过设定针对于评价值γ4的阈值th4,也可以将相关妥当性标志设定为1和0中的任意一个。例如,如果评价值γ4小于阈值th4,则将相关妥当性标志设定为1。另一方面,如果评价值γ4为阈值th4以上,则将相关妥当性标志设定为0。
[0214]
另外,例如,根据各可靠度dor(n),采用对判定对象物体模型c
model2
中的多个候补点dph(n)的各个位置hp加权平均后的候补点dph,在与相关范围ra的比较中使用马氏距离dm。这里,若将α及β设为用0以上的实数表示的系数,将可靠度平均值设为dor
avr
,且将评价值设为γ5,则表示以下(5)所示的评价函数。α
×
dm β
×
(1-dor
avr
)=γ5
ꢀꢀ
(5)
[0215]
因此,马氏距离dm越小,则包含α的项就越小。另外,可靠度平均值dor
avr
越高,则包含β的项就越小。由此,评价值γ5越小,则能评价为检测点dp(c
model2
)的位置p和预测位置predp之间是否有相关性的判定结果越妥当。
[0216]
在这种情况下,例如将相关妥当性标志设定为1。
[0217]
另一方面,评价值γ5越大,则能评价为检测点dp(c
model2
)的位置p和预测位置predp之间是否有相关性的判定结果就越不妥当。
[0218]
在这种情况下,例如将相关妥当性标志设定为0。
[0219]
另外,通过设定针对评价值γ5的阈值th5,也可以将相关妥当性标志设定为1和0中的任意一个。例如,如果评价值γ5小于阈值th5,则将相关妥当性标志设定为1。另一方面,如果评价值γ5为阈值th5以上,则将相关妥当性标志设定为0。
[0220]
换句话说,相关处理部35基于欧氏距离du和马氏距离dm中的任意一个以及多个可靠度dor(n),评价检测点dp的位置p与预测位置predp之间是否有相关性的判定结果是否妥当。
[0221]
这里,根据检测点dp的位置p和基准位置bp之间的差分矢量求出欧氏距离du。另一方面,通过检测点dp的位置p和基准位置bp求出马氏距离dm。
[0222]
此外,例如,相关处理部35求出以预测位置predp为中心的物体模型c
model1
的各顶点与对以检测点dp的位置p为中心的物体进行建模得到的判定对象物体模型c
model2
的各顶点之间的距离之和的最小值。
[0223]
相关处理部35基于求出的最小值和多个可靠度dor(n)评价检测点dp的位置p和预测位置predp之间是否有相关性的判定结果是否妥当。
[0224]
具体地说,将α和β设为用0以上的实数表示的系数。此外,将以预测位置predp为中心的物体模型c
model1
的各顶点和对以检测点dp的位置p为中心的物体进行建模得到的判定对象物体模型c
model2
的各顶点的距离之和的最小值设为rm。在此,若将评价值设为γ6,则表示以下(6)所示的评价函数。α
×
rm β
×
(1-dor)=γ6
ꢀꢀ
(6)
[0225]
因此,最小值rm越小,则包含α的项就越小。另外,可靠度dor越高,则包含β的项就越小。由此,评价值γ6越小,则能评价为检测点dp(c
model2
)的位置p和预测位置predp之间是否有相关性的判定结果越妥当。
[0226]
在这种情况下,例如将相关妥当性标志设定为1。
[0227]
另一方面,评价值γ6越大,则能评价为检测点dp(c
model2
)的位置p和预测位置predp之间是否有相关性的判定结果就越不妥当。
[0228]
在这种情况下,例如将相关妥当性标志设定为0。
[0229]
另外,通过设定针对评价值γ6的阈值th6,也可以将相关妥当性标志设定为1和0中的任意一个。例如,如果评价值γ6小于阈值th6,则将相关妥当性标志设定为1。另一方面,如果评价值γ6为阈值th6以上,则将相关妥当性标志设定为0。
[0230]
此外,将求出以预测位置predp为中心的物体模型c
model1
的各顶点和对以检测点dp的位置p为中心的物体进行建模得到的判定对象物体模型c
model2
的各顶点的距离之和的最小值,归结于解决最小斯坦纳树问题。最小斯坦纳树问题是最短网络问题。
[0231]
因此,相关处理部35通过解决最短网络问题,评价检测点dp(c
model2
)的位置p与预测位置predp之间是否存在相关性的判定结果是否妥当。
[0232]
接着,说明图1中的物体识别装置3的处理。
[0233]
图16是说明由图1的物体识别装置3进行的处理的流程图。
[0234]
在步骤s11,时刻计测部31判定当前时刻是否已经到达处理时刻tk。在由时刻计测部31判定为当前时刻已到达处理时刻tk的情况下,步骤s11中的处理转移到步骤s12的处理。在由时刻计测部31判定为当前时刻未到达处理时刻tk的情况下,继续步骤s11的处理。
[0235]
在步骤s12中,数据接收部32从各个车外信息传感器1接收检测数据dd。接着,步骤s12的处理转移到步骤s13的处理。
[0236]
在步骤s13中,数据接收部32将从各个车外信息传感器1接收到检测数据dd的时刻与检测数据dd相关联,作为本次的关联时刻rt。接着,步骤s13的处理转移到步骤s14的处理。
[0237]
在步骤s14,数据接收部32将所有车外信息传感器1标记为未使用。接着,步骤s14的处理转移到步骤s15的处理。
[0238]
在步骤s15,数据接收部32判定是否存在未使用的车外信息传感器1。当由数据接收部32判定为存在未使用的车外信息传感器1时,步骤s15的处理转移到步骤s16的处理。在由数据接收部32判定为不存在未使用的车外信息传感器1时,步骤s15的处理不转移到其它处理,并且物体识别装置3的处理结束。
[0239]
在步骤s16中,预测处理部34根据在前一个关联时刻rt的航线数据td计算在本次关联时刻rt的航线数据td的预测数据td
rtpred
。接着,步骤s16的处理转移到步骤s17的处理。
[0240]
在步骤s17中,临时设定部33选择所使用的车外信息传感器1。接着,步骤s17的处理转移到步骤s18的处理。
[0241]
在步骤s18中,临时设定部33基于所选择的车外信息传感器1的分辨率,设定对所选择的车外信息传感器1检测到的对象进行建模后得到的物体模型cmodel1上的至少一个候补点dph的位置hp。。接着,步骤s18的处理转移到步骤s19的处理。
[0242]
在步骤s19,相关处理部35执行利用图17后述的相关关联处理。接着,步骤s19的处理转移到步骤s20的处理。
[0243]
在步骤s20,相关处理部35执行利用图19后述的相关判定处理。接着,步骤s20的处理转移到步骤s21的处理。
[0244]
在步骤s21中,相关处理部35判定相关妥当性标志是否被设定为1。在由相关处理部35判定为相关妥当性标志被设定为1时,步骤s21的处理转移到步骤s22的处理。在由相关处理部35判定为相关妥当性标志被设定为1时,步骤s21的处理转移到步骤s23的处理。
[0245]
在步骤s22中,更新处理部36基于在本次关联时刻rt检测点dp相对于车外信息传感器1的校正后的位置p,更新在本次关联时刻rt的航线数据td。接着,步骤s22的处理转移到步骤s23的处理。
[0246]
在步骤s23中,数据接收部32将所选择的车外信息传感器1标记为已使用。接着,步骤s23的处理转移到步骤s15的处理。
[0247]
接着,说明图16的步骤s19中的相关关联处理。
[0248]
图17是说明图16的步骤s19中的相关关联处理的流程图。
[0249]
在步骤s31中,相关处理部35判定候补点dph的数量是否为多个。在由相关处理部35判定为候补点dph的数量是多个时,步骤s31的处理转移到步骤s32的处理。
[0250]
另一方面,在由相关处理部35判定为候补点dph的数量不是多个时,步骤s31的处理转移到步骤s42的处理。
[0251]
在步骤s42中,相关处理部35采用所设定的候补点dph。接着,步骤s42的处理转移到步骤s35的处理。
[0252]
返回到步骤s32,相关处理部35基于从所选择的车外信息传感器1到检测点dp的位置p和基准位置bp中的至少一个的距离,求出多个候补点dph中的每一个的可靠度dor。接着,步骤s32的处理转移到步骤s33的处理。
[0253]
在步骤s33中,相关处理部35判定是否执行加权平均。在相关处理部35判定为执行加权平均时,步骤s33的处理转移到步骤s34的处理。
[0254]
在步骤s34中,相关处理部35根据各个可靠度dor,采用对物体中的多个候补点dph的各个位置hp进行加权平均后得到的候补点dph。接着,步骤s34的处理转移到步骤s35的处理。
[0255]
另一方面,在步骤s33中由相关处理部35判定为不执行加权平均时,步骤s33的处理转移到步骤s39的处理。
[0256]
在步骤s39中,相关处理部35采用多个候补点dph的位置hp中可靠度dor最高的候补点dph。接着,步骤s39的处理转移到步骤s35的处理。
[0257]
在步骤s35中,相关处理部35判定是否获取了物体确定要素。在由相关处理部35判定为获取了物体确定要素时,步骤s35的处理转移到步骤s41的处理。
[0258]
在步骤s41中,相关处理部35基于预测位置predp、候补点dph和从车外信息传感器1获取的物体确定要素,确定在本次关联时刻rt的相关范围ra的基准位置bp。接着,步骤s41的处理转移到步骤s38的处理。
[0259]
另一方面,在步骤s35中相关处理部35判定为无法获取物体确定要素的情况下,步骤s35的处理转移到步骤s36的处理。
[0260]
在步骤s36中,相关处理部35判定是否与无法从车外信息传感器1获取的物体确定要素相对应地单独预先设定了设定值。在由相关处理部35判定与无法从车外信息传感器1获取的物体确定要素相对应地单独预先设定了设定值时,步骤s36的处理转移到步骤s40的处理。
[0261]
在步骤s40中,相关处理部35基于预测位置predp、候补点dph和与无法从车外信息传感器1获取的物体确定要素相对应地单独预先设定的设定值,确定在本次关联时刻rt的相关范围ra的基准位置bp。接着,步骤s40的处理转移到步骤s38的处理。
[0262]
另一方面,在步骤s36中,由相关处理部35判定为未与无法从车外信息传感器1获取的物体确定要素相对应地单独预先设定了设定值的情况下,步骤s36的处理转移到步骤s37的处理。
[0263]
在步骤s37中,基于预测位置predp和候补点dph,确定在本次关联时刻rt的相关范围ra的基准位置bp。接着,步骤s37的处理转移到步骤s38的处理。
[0264]
在步骤s38中,相关处理部35执行利用图18后述的相关范围设定处理。接着,步骤s38的处理不转移到其它处理,相关关联处理结束。
[0265]
接下来,说明图17的步骤s38中的相关范围设定处理。
[0266]
图18是说明图17的步骤s38中的相关范围设定处理的流程图。
[0267]
在步骤s51中,相关处理部35判定是否求出了可靠度dor。在由相关处理部35判定为求出了可靠度dor时,步骤s51的处理转移到步骤s52的处理。
[0268]
在步骤s52中,相关处理部35将可靠度标志设定为1。接着,步骤s52的处理转移到步骤s54的处理。
[0269]
另一方面,在步骤s51中,由相关处理部35判定为未求出可靠度dor的情况下,步骤s51的处理转移到步骤s53的处理。
[0270]
在步骤s53中,相关处理部35将可靠度标志设定为0。接着,步骤s53的处理转移到步骤s54的处理。
[0271]
在步骤s54中,相关处理部35求出以预测位置predp为中心的跟踪对象的物体模型c
model1
的大小。接着,步骤s54的处理转移到步骤s55的处理。
[0272]
在步骤s55中,相关处理部35判定是否将由车外信息传感器1引起的检测误差反映到相关范围ra。由相关处理部35判定为将由车外信息传感器1引起的检测误差反映到相关
范围ra时,步骤s55的处理转移到步骤s56的处理。
[0273]
另一方面,在步骤s55中由相关处理部35判定为未将由车外信息传感器1引起的检测误差反映到相关范围ra时,步骤s55的处理转移到步骤s60的处理。
[0274]
在步骤s60中,相关处理部35以基准位置bp为基准设定相关范围ra。接着,步骤s60的处理转移到步骤s58的处理。
[0275]
返回到步骤s56,相关处理部35求出与物体模型c
model1
的大小有关的由车外信息传感器1引起的检测误差的统计量。接着,步骤s56的处理转移到步骤s57的处理。
[0276]
在步骤s57中,相关处理部35基于以预测位置predp为中心的物体模型c
model1
的大小和统计量来设定相关范围ra。接着,步骤s57的处理转移到步骤s58的处理。
[0277]
在步骤s58中,相关处理部35判定可靠度标志是否被设定为1。在由相关处理部35判定可靠度标志被设定为1时,步骤s58的处理转移到步骤s59的处理。
[0278]
在步骤s59中,相关处理部35根据可靠度dor调整所设定的相关范围ra的大小。接着,步骤s59的处理不转移到其它处理,相关范围设定处理结束。
[0279]
另一方面,在步骤s58中,由相关处理部35判定为可靠度标志未被设定为1时,步骤s58的处理不转移到其它处理,相关范围设定处理结束。
[0280]
接下来,说明图16的步骤s20中的相关判定处理。
[0281]
图19是说明图16的步骤s20中的相关判定处理的流程图。
[0282]
在步骤s71中,相关处理部35判定检测点dp的位置p和基准位置bp之间的差分矢量的欧氏距离du、以及基于检测点dp的位置p和基准位置bp得到的马氏距离dm中的任意一个是否超过相关范围ra。
[0283]
在由相关处理部35判定为欧氏距离du和马氏距离dm中的任意一个超过相关范围ra时,步骤s71的处理转移到步骤s73的处理。
[0284]
在步骤s73中,相关处理部35将相关标志设定为0。接着,步骤s73的处理转移至步骤s74的处理。
[0285]
另一方面,在步骤s71中由相关处理部35判定为欧氏距离du和马氏距离dm中的任意一个不超过相关范围ra时,步骤s71的处理转移到步骤s72的处理。
[0286]
在步骤s72中,相关处理部35将相关标志设定为1。接着,步骤s72的处理转移至步骤s74的处理。
[0287]
在步骤s74中,相关处理部35判定相关标志是否被设定为1。在由相关处理部35判定为相关标志被设定为1时,步骤s74的处理转移到步骤s75的处理。
[0288]
在步骤s75中,相关处理部35执行利用图20后述的妥当性判定处理。接着,步骤s75不转移到其它处理,相关判定处理结束。
[0289]
另一方面,在步骤s74中,由相关处理部35判定为相关标志未被设定为1时,步骤s74的处理不转移到其它处理,相关判定处理结束。
[0290]
接下来,说明图19的步骤s76中的妥当性判定处理。
[0291]
图20是说明图19的步骤s76中的妥当性判定处理的流程图。
[0292]
在步骤s91中,相关处理部35判定是否使用检测点dp的位置p和基准位置bp之间的差分矢量的欧氏距离du、以及基于检测点dp的位置p和基准位置bp得到的马氏距离dm中的任意一个。
[0293]
在由相关处理部35判定为使用欧氏距离du和马氏距离dm中的任意一个时,步骤s91的处理转移到步骤s92的处理。
[0294]
在步骤s92中,相关处理部35判定是否求出了可靠度dor。在由相关处理部35判定为求出了可靠度dor时,步骤s92的处理转移到步骤s93的处理。
[0295]
在步骤s93中,相关处理部35基于欧氏距离du和马氏距离dm中的任意一个以及多个可靠度dor(n),评价检测点dp的位置p与预测位置predp之间是否有相关性的判定结果是否妥当。接着,步骤s93的处理转移到步骤s97的处理。
[0296]
另一方面,在步骤s91中,在判定为不使用欧氏距离du和马氏距离dm中的任意一个的情况下,步骤s91的处理转移到步骤s94的处理。
[0297]
在步骤s94中,相关处理部35求出判定是否使用对以检测点dp的位置p为中心的物体进行建模后得到的判定对象物体模型c
model2
与以预测位置predp为中心的物体模型c
model1
的重叠率r。
[0298]
在由相关处理部35判定为使用判定对象物体模型c
model2
与物体模型c
model1
的重叠率r时,步骤s94的处理转移到步骤s95的处理。
[0299]
在步骤s95中,相关处理部35基于判定对象物体模型c
model2
与物体模型c
model1
的重叠率r和多个可靠度dor(n),评价在检测点dp的位置p和预测位置predp之间是否存在相关性的判定结果是否妥当。接着,步骤s95的处理转移到步骤s97的处理。
[0300]
另一方面,在步骤s94中由相关处理部35判定为未使用判定判定对象物体模型c
model2
与物体模型c
model1
的重叠率r时,步骤s94的处理转移到步骤s96的处理。
[0301]
在步骤s96中,相关处理部35基于物体模型c
model1
的各顶点与判定对象物体模型c
model2
的各顶点之间的距离之和的最小值和多个可靠度dor(n),评价在检测点dp的位置p和预测位置predp之间是否存在相关性的判定结果是否妥当。接着,步骤s96的处理转移到步骤s97的处理。
[0302]
另一方面,在步骤s92中,由相关处理部35判定为未求出可靠度dor的情况下,步骤s92的处理转移到步骤s97的处理。
[0303]
在步骤s97中,相关处理部35判定检测点dp的位置p与预测位置predp之间是否存在相关性的判定结果是否妥当。
[0304]
在由相关处理部35判定为检测点dp的位置p与预测位置predp之间是否存在相关性的判定结果是妥当的情况下,步骤s97的处理转移到步骤s98的处理。
[0305]
在步骤s98中,相关处理部35将相关妥当性标志设定为1。接着,步骤s98的处理不转移到其它处理,妥当性判定处理结束。
[0306]
另一方面,在步骤s97中由相关处理部35判定为检测点dp的位置p与预测位置predp之间是否存在相关性的判定结果不妥当的情况下,步骤s97的处理转移到步骤s99的处理。
[0307]
在步骤s99中,相关处理部35将相关妥当性标志设定为0。接着,步骤s98的处理不转移到其它处理,妥当性判定处理结束。
[0308]
根据以上说明,相关处理部35基于候补点dph的位置hp和预测位置predp确定物体模型c
model1
中的基准位置bp。
[0309]
相关处理部35基于相关范围ra和检测点dp之间的位置关系,判定检测点dp的位置
p和预测位置predp之间是否存在相关性。这里,相关范围ra是以基准位置bp为基准而设定的。检测点dp是在车外信息传感器1检测到多个物体中的至少一个物体时得到的。
[0310]
具体来说,物体模型c
model1
是对物体进行建模后得到的模型。预测位置predp是将物体的移动目的地的位置作为物体模型c
model1
的移动目的地的位置来预测的。因此,车外信息传感器1的分辨率没有反映在预测位置predp上。
[0311]
如上述说明的那样,根据车外信息传感器1的测量原理,车外信息传感器1具有不同的分辨率。因此,临时设定部33基于车外信息传感器1的分辨率设定物体模型c
model1
中的至少一个候补点dph的位置hp。由此,车外信息传感器1的分辨率被反映到候补点dph的位置hp。
[0312]
此外,相关处理部35基于候补点dph的位置hp和预测位置predp确定物体模型c
model1
中的基准位置bp。由此,车外信息传感器1的分辨率也反映到物体模型c
model1
中的基准位置bp。因此,车外信息传感器1的分辨率也反映到以基准位置bp为基准而设定的相关范围ra。
[0313]
此外,相关处理部35将相关范围ra使用于检测点dp的位置p与预测位置predp之间是否有相关性的判定处理。
[0314]
由此,检测点dp的位置p和预测位置predp之间是否存在相关性的判定处理的结果是考虑到由车外信息传感器1的分辨率引起的偏差的结果。其结果是,对于以相关范围ra的基准位置bp作为基准而设定的相关范围ra,考虑由车外信息传感器1的分辨率引起的偏差。因此,如果判定相关范围ra与检测点dp的位置p之间是否存在相关性,则在判定结果中考虑由车外信息传感器1的分辨率引起的偏差。由此,能抑制相关范围ra与检测点dp的位置p之间的相关发生误判定的情况,因而能提高物体航线数据td的精度。
[0315]
相关处理部35基于确定物体模型c
model1
的状态和大小中的至少一个的物体确定要素来确定物体模型c
model1
中的基准位置bp。通过利用物体确定要素,候补点dph的位置hp、预测位置predp、物体模型c
model1
之间的位置关系变得明确。因此,物体模型c
mode1l
和基准位置bp之间的位置关系变得明确。由此,能准确地确定物体模型c
model1
中的基准位置bp。
[0316]
另外,相关处理部35有时无法从车外信息传感器1获取物体模型c
model1
的宽度w和长度l中的至少一个来作为物体确定要素。在这种情况下,相关处理部35在与物体模型c
model1
的宽度w和长度l分别相对应地单独预先设定的设定值中,确定与无法从车外信息传感器1获取的物体确定要素相对应的设定值。相关处理部35基于所确定的设定值确定无法从车外信息传感器1获取的物体确定要素的值。
[0317]
因此,即使无法从车外信息传感器1获取物体模型c
model1
的宽度w和长度l中的至少一个,也能抑制误差并更新航线数据td。由此,不会使本车辆与物体之间的相对位置关系较大地偏离,因而能将本车辆的自动驾驶精度的降低抑制到最小限度。
[0318]
另外,相关处理部35有时无法从车外信息传感器1获取物体模型c
model1
的宽度w、长度l和方向θ中的至少一个来作为物体确定要素。在这种情况下,相关处理部35在与物体模型c
model1
的宽度w、长度l以及方向θ分别相对应地单独预先设定的设定值中,确定与无法从车外信息传感器1获取的物体确定要素相对应的设定值。相关处理部35基于确定的设定值确定无法从车外信息传感器1获取的物体确定要素的值。
[0319]
因此,即使无法从车外信息传感器1获取物体模型c
model1
的宽度w、长度l以及方向θ
中的至少一个,也能抑制误差并更新航线数据td。由此,不会使本车辆与物体之间的相对位置关系较大地偏离,因而能将本车辆的自动驾驶精度的降低抑制到最小限度。
[0320]
另外,相关处理部35有时无法从车外信息传感器1获取物体模型c
model1
的宽度w、长度l、方向θ以及高度h中的至少一个来作为物体确定要素。在这种情况下,相关处理部35在与物体模型c
model1
的宽度w、长度l、方向θ以及高度h分别相对应地单独预先设定的设定值中,确定与无法从车外信息传感器1获取的物体确定要素相对应的设定值。相关处理部35基于所确定的设定值来确定无法从车外信息传感器1获取的物体确定要素的值。
[0321]
因此,即使无法从车外信息传感器1获取物体的宽度w、长度l、方向θ以及高度h中的至少一个,也能抑制误差并更新航线数据td。由此,不会使本车辆与物体之间的相对位置关系较大地偏离,因而能将本车辆的自动驾驶精度的降低抑制到最小限度。
[0322]
另外,相关处理部35有时无法从车外信息传感器1获取物体模型c
model1
的宽度w、长度l、方向θ、上端zh的位置和下端z
l
的位置中的至少一个来作为物体确定要素。在这种情况下,相关处理部35在与物体模型c
model1
的宽度w、长度l、方向θ、上端zh的位置以及下端z
l
的位置分别相对应地单独预先设定的设定值中,确定与无法从车外信息传感器1获取的物体确定要素相对应的设定值。相关处理部35基于所确定的设定值来确定无法从车外信息传感器1获取的物体确定要素的值。
[0323]
因此,即使无法从车外信息传感器1获取物体模型c
model1
的宽度w、长度l、方向θ、上端zh的位置以及下端z
l
的位置中的至少一个,也能抑制误差并更新航线数据td。由此,不会使本车辆与物体之间的相对位置关系较大地偏离,因而能将本车辆的自动驾驶精度的降低抑制到最小限度。
[0324]
另外,如果除了物体模型c
model1
的宽度w、长度l、方向θ之外,还校正上端zh的位置以及下端z
l
的位置,则能确定物体是否为静止物体。静止物体例如是标示板。静止物体可以是道路标识。因此,能确定物体的种类。由此,能进一步提高本车辆的自动驾驶精度。
[0325]
此外,相关处理部35中,对应于一个检测点dp的候补点dph的数量有时有多个。在这种情况下,相关处理部35基于多个候补点dph的各个可靠度dor和物体模型c
model1
中的多个候补点dph的各个位置p来确定物体模型c
model1
中的基准位置bp。
[0326]
因此,在还考虑候补点dph的位置hp的可靠度dor的基础上,确定物体模型c
model1
中的基准位置bp。由此,能有效地利用多个候补点dph中的每一个。
[0327]
此外,相关处理部35基于物体模型c
model1
中的多个候补点dph的位置hp中可靠度dor最高的候补点dph的位置hp,确定物体模型c
model1
中的基准位置bp。
[0328]
如果1个物体模型c
model1
中的候补点dph为多个,则1个物体模型c
model1
中的多个候补点dph的位置hp的各个设定精度有可能不同。由此,相关处理部35基于在1个物体模型c
model1
中的多个候补点dph的位置hp中可靠度dor最大的候补点dph的位置hp,确定物体模型c
model1
中的基准位置bp。因此,能利用一个物体模型c
model1
中的设定精度最高的候补点dph的位置hp。由此,能利用基于同一车外信息传感器1的分辨率而设定的一个物体模型c
model1
中的多个候补点dph的位置hp中设定精度最高的候补点dph的位置hp。
[0329]
此外,相关处理部35通过根据各个可靠度dor对一个物体模型c
model1
中的多个候补点dph的各个位置p进行加权平均,来确定物体模型c
model1
中的基准位置bp。
[0330]
如果1个物体模型c
model1
中的候补点dph有多个,则1个物体模型c
model1
中的多个候
补点dph的位置hp的各个设定精度不同。由此,相关处理部35通过对一个物体模型c
model1
中的多个候补点dph的位置hp进行加权平均来确定物体模型c
model1
中的基准位置bp。因此,在1个物体模型c
model1
中的多个候补点dph中,减弱可靠度dor较低的候补点dph的影响,增强可靠度dor较高的候补点dph的影响,在此基础上,确定物体模型c
model1
中的基准位置bp。由此,能在反映基于同一车外信息传感器1的分辨率而设定的一个物体中的多个候补点dph的位置hp的各个可靠度dor的基础上,确定物体模型c
model1
中的基准位置bp。
[0331]
此外,相关处理部35基于从车外信息传感器1到检测点dp的位置p和基准位置bp中的至少一个的距离来求出各个可靠度dor。
[0332]
根据从车外信息传感器1到检测点dp的位置p和基准位置bp中的至少一个的距离,车外信息传感器1的分辨率成为不同的分辨率。例如,当车外信息传感器1由毫米波雷达构成时,如果到检测点dp的位置p的距离较近,则检测点dp是最近点的可能性较高。另一方面,如果到检测点dp的位置p的距离较远,则检测点dp会被埋入分辨率单元中。由此,检测点dp被假定为从物体的中央反射的反射点。基准位置bp也与检测点dp相同。因此,相关处理部35基于从车外信息传感器1到检测点dp的位置p和基准位置bp中的至少一个的距离来求出各个可靠度。由此,能基于车外信息传感器1的性能求出可靠度dor。
[0333]
此外,相关处理部35基于以预测位置predp为中心的物体模型c
modell
的大小和与物体模型c
model1
的大小相关的由车外信息传感器1引起的检测误差的统计量,设定相关范围ra。
[0334]
因此,相关范围ra中反映了与物体模型c
model1
大小相关的信息。由此,能排除不同大小的物体的误相关。
[0335]
另外,相关处理部35基于以预测位置predp为中心的物体模型c
model1
的大小和与物体模型c
model1
的大小相关的由车外信息传感器1引起的检测误差的统计量,设定相关范围ra的大小,并且相关处理部35根据多个可靠度dor(n)调整所设定的相关范围ra的大小。
[0336]
例如,如利用图6说明的那样,当可靠度dor(1)在判定阈值距离d
th2
以上时,设定为0。这种情况下,由于可靠度dor(1)较低,检测误差较大。当检测误差较大时,本来包含在相关范围ra中的检测点dp的位置p偏离相关范围ra。因此,考虑检测误差时,需要扩大相关范围ra。由此,能使由于检测误差而偏离相关范围ra的检测点dp的位置p包含在相关范围ra中。
[0337]
另一方面,可靠度dor(1)在小于判定阈值距离d
th1
时被设定为1。这种情况下,由于可靠度dor(1)较低,因此检测误差较小。在检测误差较小时,假设包含在相关范围ra中的检测点dp的位置p不偏离相关范围ra。因此,在考虑检测误差的情况下,或多或少可以缩小相关范围ra。由此,能更准确地判定检测点dp的位置p与预测位置predp之间是否存在相关性。
[0338]
此外,相关处理部35基于欧氏距离du和马氏距离dm中的任意一个是否超过相关范围ra,判定检测点dp的位置p与预测位置predp之间是否存在相关性。这里,欧氏距离du是通过检测点dp的位置p和基准位置bp之间的差分矢量求出的。此外,通过检测点dp的位置p和基准位置bp求出马氏距离dm。
[0339]
因此,根据欧氏距离du和马氏距离dm这样的简单指标,判定检测点dp的位置p和预测位置predp之间是否存在相关性。因此,能提高检测点dp的位置p和预测位置predp之间的相关性的判定精度。
[0340]
此外,相关处理部35基于欧氏距离du和马氏距离dm中的任意一个以及多个可靠度dor(n),评价检测点dp的位置p与预测位置predp之间是否有相关性的判定结果是否妥当。这里,欧氏距离du是通过检测点dp的位置p和基准位置bp之间的差分矢量求出的。此外,通过检测点dp的位置p和基准位置bp求出马氏距离dm。
[0341]
因此,在包含仅用欧氏距离du和马氏距离dm这样的指标无法判定的判定结果的可靠性的基础上,对检测点dp的位置p和预测位置predp之间是否存在相关性的判定结果的妥当性进行评价。因此,能排除检测点dp的位置p和预测位置predp之间的相关性判定的错误。
[0342]
相关处理部35基于判定对象物体模型c
model2
与物体模型c
model1
的重叠率r和多个可靠度dor(n),评价在检测点dp的位置p和预测位置predp之间是否存在相关性的判定结果是否妥当。这里,物体模型c
model1
以预测位置predp为中心。另外,判定对象物体模型c
model2
是对以检测点dp的位置p为中心的物体进行建模后得到的。
[0343]
与本车辆与物体在彼此不同的方向上移动时相比,本车辆与物体在相同方向上移动时的重叠率r更高。因此,在考虑重叠率r的基础上,通过评价检测点dp的位置p与预测位置predp之间是否存在相关性的判定结果是否妥当,从而能排除今后可能不需要进行相关性判定的物体。
[0344]
相关处理部35基于物体模型c
model1
的各顶点与判定对象物体模型c
model2
的各顶点之间的距离之和的最小值和多个可靠度dor(n),评价在检测点dp的位置p和预测位置predp之间是否存在相关性的判定结果是否妥当。这里,物体模型c
model1
以预测位置predp为中心。另外,判定对象物体模型c
model2
是对以检测点dp的位置p为中心的物体进行建模后得到的。
[0345]
将求出以预测位置predp为中心的物体模型c
model1
的各顶点和以检测点dp的位置p为中心的判定对象物体模型c
model2
的各顶点的距离之和的最小值,归结于解决最小斯坦纳树问题。最小斯坦纳树问题是最短网络问题。因此,相关处理部35解决最短网络问题,并且还利用可靠度dor,评价检测点dp的位置p与预测位置predp之间是否存在相关性的判定结果是否妥当。由此,能更准确地判定检测点dp的位置p与预测位置predp之间是否存在相关性的判定结果的妥当性。
[0346]
此外,各个实施方式包括用于执行物体识别装置3的处理电路。这里,处理电路可以是专用的硬件,也可以是执行存储在存储器中的程序的cpu(也称为central processing unit:中央处理单元、中央处理装置、处理装置、运算装置、微处理器、微机、处理器、dsp)。
[0347]
图21是说明硬件结构例的图。在图21中,处理电路201与总线202连接。在处理电路201是专用硬件的情况下,例如单个电路、复合电路、程序化处理器、asic、fpga或它们的组合相当于处理电路201。可以通过处理电路201来实现物体识别装置3的各个部分的功能,或者可以通过处理电路201来汇总实现各个部分的功能。
[0348]
图22是说明另一硬件结构例的图。在图22中,处理器203和存储器204连接到总线202。当处理电路是cpu时,通过软件、固件或软件与固件的组合来实现物体识别装置3的各个部分的功能。软件或固件以程序的形式来表述,并存储于存储器204。处理电路读取存储于存储器204的程序并执行,从而实现各部分的功能。即,物体识别装置3具备用于存储程序的存储器204,该程序在由处理电路执行时,最终执行控制时刻计测部31、数据接收部32、临时设定部33、预测处理部34、相关处理部35以及更新处理部36的步骤。另外,可以说这些程序使计算机执行用于执行时刻计测部31、数据接收部32、临时设定部33、预测处理部34、相
关处理部35以及更新处理部36的步骤或方法。这里,ram、rom、闪存、eprom、eeprom等非易失性或易失性的半导体存储器、或磁盘、软盘、光盘、压缩光盘、迷你光盘、dvd等相当于存储器204。
[0349]
另外,物体识别装置3的各个部分的功能的一部分可以通过专用硬件来实现,而另一部分可以通过软件或固件来实现。例如,可以通过作为专用硬件的处理电路来实现临时设定部33的功能。另外,处理电路读取并执行存储在存储器204中的程序,从而能够实现相关处理部35的功能。
[0350]
由此,处理电路可以利用硬件、软件、固件或它们的组合来实现上述各功能。
[0351]
以上,在实施方式1中,对通过snn算法、gnn算法、jpda算法等求出检测数据dd
rt
和航线数据td
rt
的预测数据td
rtpred
有无相关关系的处理的一个示例进行了说明,但并不特别限定于此。
[0352]
例如,也可以根据各检测要素与各航线要素的差分是否在预定的误差量e的范围内,来判定检测数据dd
rt
与预测数据td
rtpred
有无相关关系。这里,各检测要素包含在检测数据dd
rt
中。另外,各航线要素包含在预测数据td
rtpred
中。
[0353]
具体地,相关处理部35导出检测数据dd
rt
中包含的相对于车外信息传感器1的位置p与航线数据td
rt
的预测数据td
rtpred
中包含的位置p之间的距离差。
[0354]
相关处理部35导出检测数据dd
rt
中包含的速度v与航线数据td
rt
的预测数据td
rtpred
中包含的速度v之间的速度差
[0355]
相关处理部35导出检测数据dd
rt
中包含的方位角与航线数据td
rt
的预测数据td
rtpred
中包含的方位角之间的方位角差。
[0356]
相关处理部35求出距离差、速度差和方位角差各自的平方和的平方根。当求出的平方根超过误差量e时,相关处理部35判定为没有相关关系。当求出的平方根为误差量e以下时,相关处理部35判定有相关关系。也可以通过这样的判定处理,判定检测数据dd
rt
与航线数据td
rt
的预测数据td
rtpred
有无相关关系。
[0357]
此外,例如,可以基于检测点dp的速度v来求出检测点dp的对地速度。有时会求出检测点dp的对地速度。
[0358]
在这种情况下,当基于检测点dp的对地速度判定为由车外信息传感器1检测到的物体是车辆c时,检测数据dd的物体确定要素中有时不包含车辆c的宽度w和长度l。
[0359]
在这种情况下,车辆c的宽度w被设定为2[m],车辆c的长度l被设定为4.5[m]。以这种方式设定的车辆c的宽度w和长度l也是与无法从车外信息传感器1获取的物体确定要素相对应地单独预先设定的设定值。
[0360]
另外,更新处理部36可以基于当由车外信息传感器1检测到物体时的检测点dp的速度v来更新航线数据td。由此,能基于考虑到由车外信息传感器1观测到的观测结果的检测点dp的速度v来更新航线数据td。由此,能准确地捕捉到本车辆与物体之间的相对位置关系,因而能进一步提高本车辆的自动驾驶精度。标号说明
[0361]
1车外信息传感器、2车辆信息传感器、3物体识别装置、4通知控制装置、5车辆控制装置、31时刻计测部、32数据接收部、33临时设定部、34预测处理部、35相关处理部、36更新处理部。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。