1.本发明涉及磁产生单元、旋转角度检测装置和旋转电机。
背景技术:
2.专利文献1公开了一种磁产生单元。该磁产生单元对温度变动环境的耐久性优异。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2016-153765号公报
技术实现要素:
6.发明所要解决的课题
7.然而,在专利文献1所记载的磁产生单元中,磁产生体可能相对于壳体旋转。因此,也存在无法维持旋转角度的检测精度的情况。
8.本发明是为了解决上述课题而完成的。本发明的目的在于提供一种能够维持旋转角度的检测精度的磁产生单元、旋转角度检测装置和旋转电机。
9.用于解决课题的手段
10.本发明的磁产生单元具备:壳体,其由非磁性体形成,具有圆筒部和口部,所述圆筒部的一端开放,所述口部在所述圆筒部的另一端侧与所述圆筒部的内侧的空间连续地相连,所述口部的形状不是中心轴与所述圆筒部的中心轴相同的圆筒;以及磁产生体,其在所述壳体中被连续地填充到所述圆筒部和所述口部,直至所述圆筒部的开放的端部侧,被填充到所述口部的部分抑制被填充到所述圆筒部的部分的移动,该磁产生体在与所述壳体的轴向垂直的方向上被磁化。
11.本发明的旋转角度检测装置具备:所述磁产生单元;以及磁传感器,其与所述磁产生体对置。
12.本发明的旋转电机具备:外壳,其成为外廓;定子,其设置于所述外壳;旋转轴,其旋转自如地设置于所述外壳;转子,其设置于所述旋转轴;所述磁产生单元,其在所述旋转轴的端部被设置成所述圆筒部的开放的端部侧突出;以及磁传感器,其与所述磁产生体对置。
13.发明效果
14.根据这些发明,磁产生体中的被填充到口部的部分抑制被填充到圆筒部的部分的移动。因此,能够维持旋转角度的检测精度。
附图说明
15.图1是应用实施方式1中的旋转电机的电梯的轿厢的关键部分的主视图。
16.图2是应用实施方式1中的旋转电机的电梯的轿厢的关键部分的纵剖视图。
17.图3是实施方式1中的旋转电机的纵剖视图。
18.图4是实施方式1中的旋转电机的磁产生单元的俯视图。
19.图5是实施方式1中的旋转电机的磁产生单元的纵剖视图。
20.图6是从底部侧观察实施方式2中的旋转电机的磁产生单元时的仰视图。
21.图7是从底部侧观察实施方式3中的旋转电机的磁产生单元时的仰视图。
22.图8是实施方式4中的旋转电机的磁产生单元的纵剖视图。
23.图9是实施方式5中的旋转电机的磁产生单元的纵剖视图。
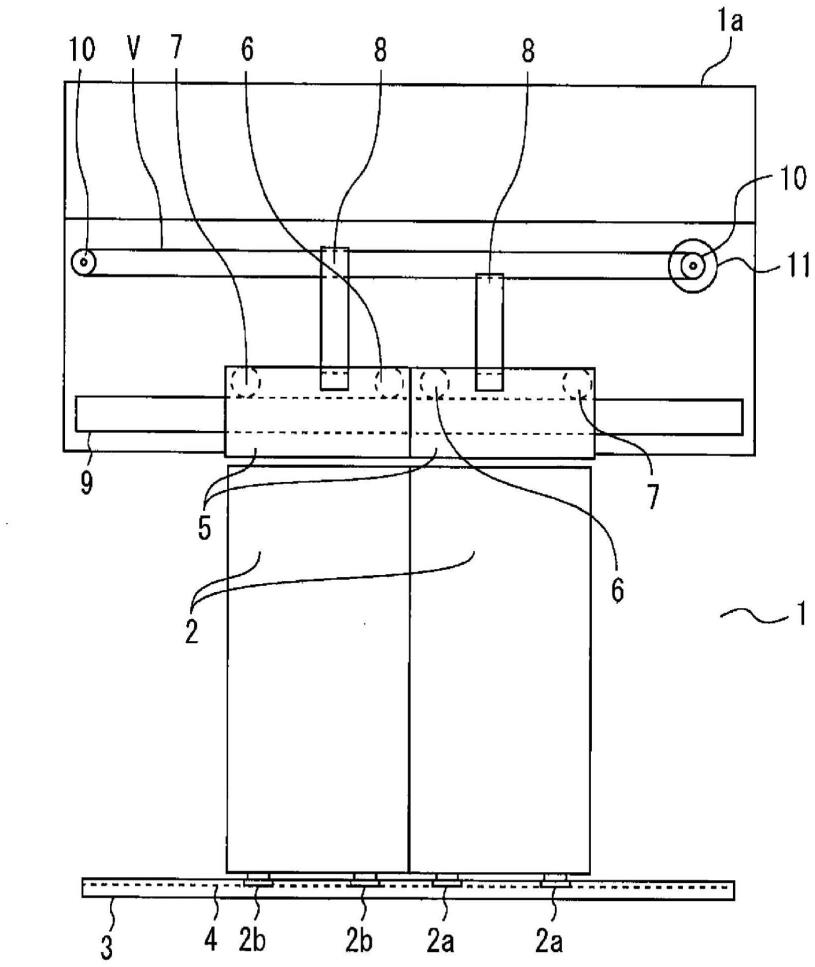
具体实施方式
24.根据附图,对用于实施本发明的方式进行说明。另外,在各图中,对相同或相当的部分标注相同的标号。适当地简化乃至省略该部分的重复说明。
25.实施方式1
26.图1是应用实施方式1中的旋转电机的电梯的轿厢的关键部分的主视图。图2是应用实施方式1中的旋转电机的电梯的轿厢的关键部分的纵剖视图。
27.在图1中,电梯的轿厢1被设置成能够在未图示的井道的内部升降。顶棚1a成为轿厢1的上部。
28.一对轿厢门2是双开式的。轿厢门2的一方设置在轿厢1的出入口的一侧。轿厢门2的另一方设置在轿厢1的出入口的另一侧。在图1中,一对轿厢门2完全关闭。
29.轿厢门2的一方具备一对门靴2a。一对门靴2a分别设置在轿厢门2的一方的下部。一对门靴2a分别通过腿部与轿厢门2的一方连结。
30.轿厢门2的另一方具备一对门靴2b。一对门靴2b分别设置在轿厢门2的另一方的下部。一对门靴2b分别通过腿部与轿厢门2的另一方连结。
31.轿厢地坎3设置在轿厢1的出入口的下部。轿厢地坎3具有槽4。槽4形成为能够对一对门靴2a和一对门靴2b进行引导。
32.门吊架5的一方的下端部与轿厢门2的一方的上端部连结。前方辊6的一方设置于门吊架5的一方的前端部。后方辊7的一方设置于门吊架5的一方的后端部。连结件8的一方设置在前方辊6的一方与后方辊7的一方之间。连结件8的一方的下端部与门吊架5的一方的上端部连结。
33.门吊架5的另一方的下端部与轿厢门2的另一方的上端部连结。前方辊6的另一方设置于门吊架5的另一方的前端部。后方辊7的另一方设置于门吊架5的另一方的后端部。连结件8的另一方设置在前方辊6的另一方与后方辊7的另一方之间。连结件8的另一方的下端部与门吊架5的另一方的上端部连结。
34.吊架轨道9设置在轿厢1的出入口的上方。吊架轨道9的长度方向被设定为水平方向。吊架轨道9从下方支承前方辊6的一方、后方辊7的一方、前方辊6的另一方、以及后方辊7的另一方。
35.带轮10的一方设置在吊架轨道9的一端部的上方。带轮10的另一方设置在吊架轨道9的另一端部的上方。
36.带v卷绕于一对带轮10。带v的下侧与一对连结件8的一方的上端部连结。带v的上侧与一对连结件8的另一方的上端部连结。
37.旋转电机11被设置为门马达。旋转电机11设置在比轿厢1的顶棚1a靠下方的位置。
旋转电机11设置在吊架轨道9的一端部的上方。旋转电机11的旋转轴旋转自如地支承带轮10的一方。
38.一对带轮10的一方追随旋转电机11的旋转轴的旋转而旋转。带v追随一对带轮10的一方的旋转而循环移动。一对连结件8追随带v的循环移动而向彼此相反的方向移动。
39.一对门吊架5分别追随一对连结件8而向彼此相反的方向移动。一对轿厢门2分别追随一对门吊架5而向彼此相反的方向移动。
40.接着,使用图3对旋转电机11进行说明。
41.图3是实施方式1中的旋转电机的纵剖视图。
42.如图3所示,在旋转电机11中,外壳12成为外廓。外壳12具备第1轴支承部12a和第2轴支承部12b。
43.第1轴支承部12a形成为平板状。第2轴支承部12b形成为平板状。第1轴支承部12a与第2轴支承部12b彼此对置。
44.第1开口12c形成于第1轴支承部12a的中央。第1开口12c形成为圆状。第2开口12d形成于第2轴支承部12b的中央。第2开口12d形成为圆状。
45.第1轴承13安装于第1开口12c。第2轴承14安装于第2开口12d。旋转轴15借助第1轴承13和第2轴承14旋转自如地支承于外壳12。
46.转子16具备转子铁芯17和多个转子磁铁18。转子铁芯17固定于旋转轴15。多个转子磁铁18固定于转子铁芯17的外周面。
47.定子19具备定子铁芯20和多个定子线圈21。定子铁芯20固定于外壳12。定子铁芯20隔着间隙与转子铁芯17对置。多个定子线圈21卷绕于定子铁芯20。
48.旋转轴15具备第1端部15a和第2端部15b。
49.第1端部15a是轴向的第1轴支承部12a侧的端部。第1端部15a在第1开口12c的内部保持于第1轴承13。第2端部15b是轴向的第2轴支承部12b侧的端部。第2端部15b贯通第2轴承14而向外壳12的外部突出。
50.凹部15c形成于第1端部15a侧的端面的中央。例如,凹部15c形成为圆状。
51.磁产生单元22形成为圆柱状。磁产生单元22设置在凹部15c的内部。例如,磁产生单元22不从第1端部15a侧的端面突出。
52.磁产生单元22具备壳体23和磁产生体24。
53.壳体23由非磁性体形成。例如,壳体23由树脂、铝、黄铜等形成。壳体23具备圆筒部23a和底部23b。底部23b封闭圆筒部23a的轴向一端。
54.在图3中,未图示的多个切口23c沿圆筒部23a的周向排列。多个切口23c在对磁产生体24进行周向定位时被利用。在该例子中,2个切口23c设置于圆筒部23a。多个切口23c关于圆筒部23a的中心呈点对称地配置。此外,多个切口23c与传感器基板25对置。
55.磁产生体24形成为圆板状。磁产生体24收纳于壳体23的内部。磁产生体24是通过在将粘结磁铁的材料注射到壳体23之后进行磁化而形成的。
56.为了检测转子磁铁18与定子线圈21的相对角度,要使磁产生体24相对于转子磁铁18符合某个角度。磁产生体24在旋转轴15的周向上被定位。切口23c用于磁产生体24在周向上的定位。
57.壳体23通过粘接剂固定于凹部15c的内部。在将壳体23插入到凹部15c内之后,在
粘接剂固化之前,将辅具或作业人员的手指等勾挂于切口23c而使壳体23旋转,进行磁产生体24的周向的定位。在该状态下,使粘接剂固化。
58.在旋转轴15的端面15a设有进行磁产生体24的定位时的记号。多个切口23c成为磁产生体24侧的定位的记号。
59.例如,传感器基板25是印刷基板。传感器基板25固定于第1轴支承部12a的与第2轴支承部12b相反的一侧的面。例如,传感器基板25通过多个螺栓固定于第1轴支承部12a。传感器基板25封闭第1开口12c。
60.例如,磁传感器26是磁阻元件。磁传感器26设置于传感器基板25。磁传感器26隔着间隙与磁产生体24对置。
61.磁产生单元22、传感器基板25和磁传感器26作为旋转角度检测装置27发挥功能。旋转角度检测装置27产生与旋转轴15的旋转角度对应的信号。在旋转电机11为马达的情况下,该信号被输送到控制马达的旋转的控制部(未图示)。
62.接下来,使用图4和图5对磁产生单元22进行说明。
63.图4是实施方式1中的旋转电机的磁产生单元的俯视图。图5是实施方式1中的旋转电机的磁产生单元的纵剖视图。
64.如图4所示,在壳体23,圆筒部23a的一端开放。
65.如图5所示,在壳体23,口部23d连结于圆筒部32a的另一端侧。口部23d的形状不是中心轴与圆筒部23a的中心轴相同的圆筒。例如,口部23d形成为内径随着去向圆筒部23a侧而减小。
66.磁产生体24在壳体23中被连续地填充到圆筒部23a和口部23d,直至圆筒部23a的开放的端部侧。磁产生体24中的被填充到口部23d的部分抑制被填充到圆筒部23a的部分的移动。磁产生体24在与壳体23的轴向垂直的方向上被磁化。
67.根据在以上内容中进行了说明的实施方式1,磁产生体24中的被填充到口部23d的部分抑制被填充到圆筒部23a的部分的移动。因此,能够维持旋转角度的检测精度。
68.具体而言,磁产生体24中的被填充到口部23d的部分抑制被填充到圆筒部23a的部分向圆筒部23a的一端侧的移动。因此,能够更可靠地维持旋转角度的检测精度。
69.实施方式2
70.图6是从底部侧观察实施方式2中的旋转电机的磁产生单元时的仰视图。另外,对与实施方式1的部分相同或相当的部分标注相同的标号。省略该部分的说明。
71.如图6所示,在壳体23,口部23d具有截面形状不为圆形的内部空间。例如,口部23d具有椭圆形的截面形状的内部空间。
72.根据在以上内容中进行了说明的实施方式2,磁产生体24中的被填充到口部23d的部分抑制被填充到圆筒部23a的部分向圆筒部23a的一端侧的移动。因此,能够更可靠地维持旋转角度的检测精度。
73.实施方式3
74.图7是从底部侧观察实施方式3中的旋转电机的磁产生单元时的仰视图。另外,对与实施方式1的部分相同或相当的部分标注相同的标号。省略该部分的说明。
75.如图7所示,在壳体23,口部23d具有圆形截面形状的内部空间,该圆形截面形状的内部空间的中心轴与圆筒部23a的中心轴平行且不为同一中心轴。
76.根据在以上内容中进行了说明的实施方式3,磁产生体24中的被填充到口部23d的部分抑制被填充到圆筒部23a的部分的旋转。因此,能够更可靠地维持旋转角度的检测精度。
77.实施方式4
78.图8是实施方式4中的旋转电机的磁产生单元的纵剖视图。另外,对与实施方式1的部分相同或相当的部分标注相同的标号。省略该部分的说明。
79.如图8所示,口部23d具备大径部和小径部。小径部形成于靠壳体23的一端的一侧。大径部形成于靠壳体23的另一端的一侧。大径部的内径比小径部的内径大。
80.根据在以上内容中进行了说明的实施方式4,磁产生体24中的被填充到口部23d的部分抑制被填充到圆筒部23a的部分向圆筒部23a的一端侧的移动。因此,能够更可靠地维持旋转角度的检测精度。
81.实施方式5
82.图9是实施方式5中的旋转电机的磁产生单元的纵剖视图。另外,对与实施方式1的部分相同或相当的部分标注相同的标号。省略该部分的说明。
83.如图9所示,在壳体23,口部23d具有长度方向不与圆筒部23a的中心轴平行的内部空间。
84.根据在以上内容中进行了说明的实施方式5,磁产生体24中的被填充到口部23d的部分抑制被填充到圆筒部23a的部分的旋转和向圆筒部23a的一端侧的移动。因此,能够更可靠地维持旋转角度的检测精度。
85.另外,也可以将实施方式1至实施方式5的旋转电机11应用于门马达以外的电动机、发电机、发电电动机等。
86.此外,也可以将实施方式1至实施方式3的磁传感器26设为霍尔元件、霍尔ic、磁编码器等。
87.产业上的可利用性
88.如上所述,本发明的电梯的监视装置能够用于电梯系统。
89.标号说明
90.1:轿厢;1a:顶棚;2:轿厢门;2a:门靴;2b:门靴;3:轿厢地坎;4:槽;5:门吊架;6:前方辊;7:后方辊;8:连结件;9:吊架轨道;10:带轮;11:旋转电机;12:外壳;12a:第1轴支承部;12b:第2轴支承部;12c:第1开口;12d:第2开口;13:第1轴承;14:第2轴承;15:旋转轴;15a:第1端部;15b:第2端部;15c:凹部;16:转子;17:转子铁芯;18:转子磁铁;19:定子;20:定子铁芯;21:定子线圈;22:磁产生单元;23:壳体;23a:圆筒部;23b:底部;23c:切口;23d:口部;24:磁产生体;25:传感器基板;26:磁传感器;27:旋转角度检测装置。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。