1.本发明涉及物体识别装置和物体识别方法。
背景技术:
2.以往,已知一种物体识别装置,其将传感器检测到物体时的检测点的位置与物体的形状模型相匹配,并基于物体的形状模型中的检测点的位置,确定形成物体航迹的航迹点的位置(例如,参照专利文献1)。现有技术文献专利文献
3.专利文献1:日本专利特开2017-215161号公报
技术实现要素:
发明所要解决的技术问题
4.然而,在专利文献1所示的现有的物体识别装置中,根据传感器的分辨率,有时无法确定检测点的位置是物体的哪个位置。该情况下,检测点的位置无法与物体的形状模型相匹配,因此无法确定物体中的航迹点的位置。因此,表示物体航迹的物体航迹数据的精度降低。
5.本发明是为了解决上述问题而完成的,其目的在于获得一种能够提高物体的航迹数据的精度的物体识别装置和物体识别方法。用于解决技术问题的技术手段
6.本发明所涉及的物体识别装置包括:临时设定部,该临时设定部基于检测物体的传感器的规格来设定所述物体中至少一个候补点的位置;以及更新处理部,该更新处理部基于所述物体中所述候补点的位置来校正所述传感器检测到物体时的检测点相对于所述传感器的位置,并基于所述检测点相对于所述传感器的校正后的位置来更新表示所述物体航迹的航迹数据。发明效果
7.根据本发明的物体识别装置,能提高物体航迹数据的精度。
附图说明
8.图1是示出实施方式1所涉及的车辆控制系统的功能结构例的框图。图2是示出图1的传感器和物体之间的相对位置关系的一个示例的图。图3是示出成为与图2车辆对应的车辆中的检测点的位置的第1候补的候补点的一个示例的图。图4是示出成为与图2车辆对应的车辆中的检测点的位置p的第2候补的候补点的一个示例的图。图5是示出成为在车辆中的检测点的位置的另一候补的候补点的一个示例的图。
图6是示出n为自然数时图3至图5的候补点的可靠度的设定例的图。图7是示出图1的航迹数据的一个示例的图。图8是示出图1的检测数据的校正例的图。图9是示出基于图8的检测数据的图7的航迹数据的更新例的图。图10是示出在图7的航迹数据中还包含方向的一个示例的图。图11是示出在图7的航迹数据中还包含高度的一个示例的图。图12是示出图7的航迹数据中还包括上端位置和下端位置的一个示例的图。图13是说明图1的物体识别装置所涉及的处理的流程图。图14是说明图13的步骤s20中的位置校正处理的流程图。图15是说明根据图13的步骤s22中的判定处理的判定结果为是的情况而被分支的处理的流程图。图16是说明根据图15的步骤s51中的判定处理的判定结果为否的情况和步骤s54中的判定处理的判定结果为是的情况而被分支的处理的流程图。图17是说明实施方式2所涉及的因图15的步骤s51中的判定处理的判定结果为否的情况和步骤s54中的判定处理的判定结果为是的情况而被分支的处理的流程图。图18是说明实施方式3所涉及的根据图15的步骤s51中的判定处理的判定结果为否的情况和步骤s54中的判定处理的判定结果为是的情况而被分支的处理的流程图。图19是说明实施方式4所涉及的根据图15的步骤s51中的判定处理的判定结果为否的情况和步骤s54中的判定处理的判定结果为是的情况而被分支的处理的流程图。图20是说明实施方式5所涉及的图13的步骤s20中的位置校正处理的流程图。图21是说明硬件结构例的图。图22是说明另一硬件结构例的图。
具体实施方式
9.实施方式1.图1是示出实施方式1所涉及的车辆控制系统的功能结构例的框图。如图1所示,车辆控制系统包括多个车外信息传感器1、多个车辆信息传感器2、物体识别装置3、通知控制装置4和车辆控制装置5。
10.多个车外信息传感器1中的每一个被安装在本车辆上。例如,在多个车外信息传感器1中,一部分车外信息传感器1单独安装在前保险杠内部、后保险杠内部和挡风玻璃的车厢侧。安装在前保险杠内部的车外信息传感器1以位于车辆前方或侧面的物体作为观测对象。安装在后保险杠内部的车外信息传感器1以位于车辆的后方或侧面的物体作为观测对象。
11.此外,安装在挡风玻璃的车厢侧的车外信息传感器1配置在内后视镜旁边。安装在挡风玻璃的车厢侧中的内后视镜旁边的车外信息传感器1以位于车辆前方的物体作为观测对象。
12.由此,安装在本车辆上的多个车外信息传感器1中的每一个是能够获取关于本车辆周围的物体的信息作为检测数据dd的传感器。由多个车外信息传感器1中的每一个获取到的关于本车辆周围的物体的各个检测数据dd被整合为检测数据dd并生成。检测数据dd生
成为能够提供给物体识别装置3的数据结构。检测数据dd包括至少一个与至少一个检测点dp相对于车外信息传感器1的位置p相关的信息。
13.车外信息传感器1通过检测物体表面上的任意点作为检测点来观测物体。各个检测点dp表示在本车辆周围由车外信息传感器1观测到的物体中的各个点。例如,车外信息传感器1将光作为照射光照射本车辆的周围,并接受在物体的各反射点反射的反射光。该各反射点相当于各检测点dp。
14.此外,根据车外信息传感器1的测量原理,关于在检测点dp可观测的物体的信息不同。作为车外信息传感器1的种类,可以使用毫米波雷达、激光传感器、超声波传感器、红外线传感器、摄像头等。另外,省略超声波传感器和红外线传感器的说明。
15.例如,毫米波雷达分别安装在本车辆的前保险杠和后保险杠上。毫米波雷达具有一个发送天线和多个接收天线。毫米波雷达能测量与物体的距离和相对速度。例如,通过fmcw(frequency modulation continuous wave:调频连续波)方式测量与物体之间的距离和相对速度。因此,可以基于通过毫米波雷达测量到的与物体之间的距离和相对速度来观测检测点dp相对于车外信息传感器1的位置p和检测点dp的速度v。
16.另外,在以下的说明中,检测点dp的速度v可以是本车辆与物体之间的相对速度,也可以是通过进一步利用gps以绝对位置为基准的速度。
17.毫米波雷达可以测量物体的方位角。基于由多个接收天线中的每一个接收的各个电波的相位差测量物体的方位角。因此,能基于由毫米波雷达测量到的物体的方位角观测物体的方向θ。
18.由此,利用毫米波雷达,作为与物体相关的信息,除了检测点dp相对于车外信息传感器1的位置p之外,还能观测包括检测点dp的速度v和物体的方向θ的检测数据dd。检测点dp相对于车外信息传感器1的位置p、检测点dp的速度v以及物体的方向θ中,检测点dp的速度v以及物体的方向θ分别是确定物体状态的动态要素。这些动态要素中的每一个都是物体确定要素。
19.另外,在fmcw方式的毫米波雷达中,当测量与物体之间的相对速度时,检测由发送信号的频率和接收信号的频率之间的多普勒效应引起的频移,即多普勒频率。由于该检测到的多普勒频率和与物体之间的相对速度成比例,因此能从多普勒频率导出相对速度。
20.此外,毫米波雷达的速度分辨率是由多普勒频率的分辨率决定的。多普勒频率的分辨率为接收信号的观测时间的倒数。因此,观测时间越长,多普勒频率的分辨率越高。因此,观测时间越长,毫米波雷达的速度分辨率越高。
21.例如,当本车辆正在高速道路上行驶时,与本车辆正在普通道路上行驶的情况相比,毫米波雷达的观测时间设定得更长。因此,能将毫米波雷达的速度分辨率设定得较高。因此,在本车辆正在高速道路上行驶的情况下,与本车辆正在普通道路上行驶的情况相比,能更快地观测到速度的变化。由此,能更快地观测到本车辆周围的物体。
22.此外,毫米波雷达的距离分辨率定义为将光速除以调制频率带宽。因此,调制频率带宽越宽,毫米波雷达的距离分辨率越高。
23.例如,当本车辆正在停车场行驶的情况下,与本车辆正在普通道路或高速道路行驶的情况相比,将调制频率带宽设置得更宽。因此,能将毫米波雷达的距离分辨率设定为较高。在将毫米波雷达的距离分辨率设定为较高的情况下,在本车辆周围,可检测到的最小单
位距离变得更细,因此能将相邻排列的物体彼此区分开。
24.例如,当行人和车辆作为本车辆周围的物体存在时,处于对于从毫米波雷达照射的电磁波,反射强度低的行人和反射强度高的车辆混合存在的状态。即使在这种状态下,从行人反射的电磁波也不会被车辆反射的电磁波所吸收,因此能检测到行人。
25.激光传感器例如安装在本车辆车顶的车外。作为激光传感器,例如,lidar(light detection and ranging:激光雷达)安装在本车辆车顶的车外。lidar具有多个投光部、1个受光部和运算部。多个投光部相对于本车辆的移动方向前方在垂直方向上以多个角度配置。
26.lidar采用tof(time of flight:飞行时间)方式。具体而言,lidar中的多个投光部具有在预先设定的投光时间的期间内边在水平方向上旋转边辐射状地对激光进行投光的功能。lidar中的受光部具有在预先设定的受光时间的期间内对来自物体的反射光进行受光的功能。lidar中的运算部具有求出成为多个投光部中的投光时刻与受光部中的受光时刻之间的差分的往返时间的功能。lidar中的运算部具有基于该往返时间来求出与物体之间的距离的功能。
27.lidar具有通过求出与物体之间的距离还测定与物体之间的方向的功能。因此,从lidar测量到的测量结果中可以观测到检测点dp相对于车外信息传感器1的位置p、检测点dp的速度v以及物体的方向θ。
28.由此,利用lidar,作为与物体相关的信息,除了检测点dp相对于车外信息传感器1的位置p之外,还能观测包括检测点dp的速度v和物体的方向θ的检测数据dd。如上述说明那样,检测点dp相对于车外信息传感器1的位置p、检测点dp的速度v以及物体的方向θ中,检测点dp的速度v以及物体的方向θ分别是物体确定要素。
29.此外,lidar的速度分辨率由构成激光的脉冲的发光间隔决定。因此,构成激光的脉冲的发光间隔越短,lidar的速度分辨率越高。
30.例如,在本车辆正在高速道路上行驶的情况下,与本车辆正在普通道路上行驶的情况相比,通过将构成由lidar照射的激光的脉冲的发光间隔设定得更短,能将lidar的速度分辨率设定得更高。因此,在本车辆正在高速道路上行驶的情况下,与本车辆正在普通道路上行驶的情况相比,能更快地观测到速度的变化。由此,能更快地观测到本车辆周围的物体。
31.另外,lidar的距离分辨率由构成激光的脉冲宽度决定。因此,构成激光的脉冲宽度越短,lidar的距离分辨率越高。
32.例如,在本车辆正在停车场行驶的情况下,与本车辆正在普通道路或高速道路上行驶的情况相比,将构成从lidar照射的激光的脉冲宽度设定得更短。由此,能将lidar的距离分辨率设定为较高。在将lidar的距离分辨率设定为较高的情况下,在本车辆周围,可检测到的最小单位距离变得更细,因此能将相邻排列的物体彼此区分开。
33.例如,当行人和车辆作为本车辆周围的物体存在时,处于对于从lidar照射的激光,反射强度低的行人和反射强度高的车辆混合存在的状态。即使在这种状态下,从行人反射的反射光也不会被从车辆反射的反射光所吸收,因此能检测到行人。
34.摄像头安装在挡风玻璃的车厢一侧的内后视镜旁边。例如,单目摄像头被用作摄像头。单目摄像头具有拍摄元件。拍摄元件例如是ccd(charge coupled device:电荷耦合
元件)图像传感器或cmos(complementary metal oxide semiconductor:互补金属氧化物半导体)图像传感器。单目摄像头以与拍摄元件的拍摄方向正交的二维空间中的像素水平为最小单位,连续地检测物体的有无和距离。例如,单目摄像头包括例如向镜头添加红、绿和蓝的原色滤光镜的结构。通过这样的结构,能根据使用原色滤光镜分割的光线的视差求出距离。因此,从由摄像头测量到的测量结果中观测到检测点dp相对于车外信息传感器1的位置p、物体的宽度w和长度l。
35.如上所述,根据摄像头,作为与物体相关的信息,除了检测点dp相对于车外信息传感器1的位置p之外,还可以观测包括物体的宽度w和长度l的检测数据dd。在检测点dp相对于车外信息传感器1的位置p、物体的宽度w和长度l中,物体的宽度w和长度l分别是确定物体大小的静态要素。这些静态要素中的每一个都是物体确定要素。
36.另外,摄像头除了单目摄像头以外,还可使用tof摄像头、立体摄像头、红外线摄像头等。
37.多个车辆信息传感器2具有检测车速、转向角和横摆率等本车辆的车辆信息作为本车辆数据cd的功能。本车辆数据cd生成为可提供给物体识别装置3的数据结构。
38.物体识别装置3包括时刻测量部31、数据接收部32、临时设定部33、预测处理部34、相关处理部35和更新处理部36。另外,时刻测量部31、数据接收部32、临时设定部33、预测处理部34、相关处理部35以及更新处理部36具有由执行存储在非易失性存储器或易失性存储器中的程序的cpu实现的功能。
39.时刻测量部31具有测量物体识别装置3的时刻的功能。时刻测量部31生成测量到的时刻作为公共时刻ct。在能够提供给数据接收部32的数据结构中生成公共时刻ct。
40.数据接收部32具有输入接口的功能。
41.具体地,数据接收部32具有从各个车外信息传感器1接收检测数据dd的功能。各个检测数据dd由数据接收部32整合作为检测数据dd。数据接收部32具有通过将由时刻测量部31生成的公共时刻ct作为关联时刻rt与检测数据dd相关联,从而生成检测数据dd
rt
的功能。检测数据dd
rt
被生成为能够分别提供给临时设定部33和相关处理部35的数据结构。
42.当从车外信息传感器1接收到检测数据dd时,数据接收部32判定能获取检测数据dd。数据接收部32将表示在相应的车外信息传感器1中出现故障的故障标志设定为0,并生成检测数据dd
rt
。
43.这里,当故障标志被设定为0时,表示相应的车外信息传感器1没有发生故障。这里,当故障标志被设定为0时,表示相应的车外信息传感器1没有发生故障。
44.另一方面,当未从车外信息传感器1接收到检测数据dd时,数据接收部32判定为无法获取检测数据dd,并将故障标志设定为1,不生成检测数据dd
rt
。
45.当从车外信息传感器1接收到检测数据dd时,数据接收部32判定检测数据dd的妥当性。当判定为检测数据dd不具有妥当性时,数据接收部32判定为无法获取检测数据dd,并将表示与相应的车外信息传感器1相对应的检测数据dd不具有妥当性的妥当性标志设定为0。数据接收部32在判定为检测数据dd具有妥当性的情况下,判定为能够获取检测数据dd,并将上述妥当性标志设定为1。
46.由此,能通过参照故障标志和妥当性标志中的至少一个来参照数据接收部32中是否获取了检测数据dd的判定结果。
47.此外,数据接收部32具有从车辆信息传感器2接收本车辆数据cd的功能。数据接收部32具有通过将由时刻测量部31生成的公共时刻ct作为关联时刻rt与本车辆数据cd相关联,从而生成本车辆数据cd
rt
的功能。本车辆数据cd
rt
被生成为能够提供给预测处理部34的数据结构。
48.临时设定部33具有基于检测物体的车外信息传感器1的分辨率来设定物体中的至少一个候补点dph的位置hp的功能。临时设定部33具有生成包含至少一个候补点dph的位置hp的临时设定数据dh的功能。临时设定数据dh被生成为能够由临时设定部33提供给相关处理部35的数据结构。
49.另外,车外信息传感器1的分辨率包含在车外信息传感器1的规格中。
50.具体而言,根据车外信息传感器1的规格,确定例如与车外信息传感器1的动作设定相关的属性,与车外信息传感器1的配置状态相关的属性等。与车外信息传感器1的动作设定相关的属性是可观测的测量范围、测量范围的分辨率、采样频率等。与车外信息传感器1的配置状况相关的属性是车外信息传感器1的可能配置角度、车外信息传感器1的可耐久环境温度、车外信息传感器1与观测对象之间的可测量距离等。
51.预测处理部34具有从数据接收部32接收本车辆数据cd
rt
的功能。预测处理部34具有从更新处理部36接收航迹数据td
rt-1
的功能。航迹数据td
rt-1
与航迹数据td中的相当于本次关联时刻rt的前一个的前一次关联时刻rt,即关联时刻rt-1相关联。预测处理部34具有基于关联时刻rt的本车辆数据cd
rt
和关联时刻rt-1的航迹数据td
rt-1
,通过已知的算法生成关联时刻rt的航迹数据td
rt
的预测数据td
rtpred
的功能。公知的算法例如是像卡尔曼滤波器那样能够根据观测值推定时间序列变化的物体的中心点的算法。
52.相关处理部35具有接收检测数据dd
rt
、包含候补点dph的位置hp的临时设定数据dh、航迹数据td
rt
的预测数据td
rtpred
的功能。相关处理部35具有判定检测数据dd
rt
和航迹数据td的预测数据td
rtpred
是否相关的功能。使用snn(simple nearest neighbor:简单近邻)算法、gnn(global nearest neighbor:全局最近邻)算法、jpda(joint probabilistic data association:联合概率数据关联)算法等判定检测数据dd
rt
和航迹数据td
rt
的预测数据td
rtpred
之间有无相关关系。
53.具体而言,基于马氏距离是否包含于栅极范围内来判定检测数据dd
rt
与航迹数据td
rt
的预测数据td
rtpred
有无相关关系。基于检测数据dd
rt
中包含的检测点dp相对于车外信息传感器1的位置p和航迹数据td
rt
的预测数据td
rtpred
中包含的物体的中心点的位置p导出马氏距离。导出的马氏距离包含于栅极范围内时,判定为检测数据dd
rt
和航迹数据td
rt
的预测数据td
rtpred
具有相关关系。导出的马氏距离不包含于栅极范围内时,判定为检测数据dd
rt
和航迹数据td
rt
的预测数据td
rtpred
没有相关关系。
54.栅极范围被设定为车外信息传感器1的可观测范围。车外信息传感器1中的可观测范围根据车外信息传感器1的种类而不同。因此,栅极范围根据车外信息传感器1的种类而不同。
55.相关处理部35具有在检测数据dd
rt
和航迹数据td
rt
的预测数据td
rtpred
存在相关性的情况下,决定检测数据dd
rt
和航迹数据td
rt
的预测数据td
rtpred
存在对应关系的功能。相关处理部35具有生成相关数据rd
rt
的功能,该相关数据rd
rt
是将检测数据dd
rt
、包含候补点dph的位置hp的临时设定数据dh、航迹数据td
rt
的预测数据td
rtpred
与关于所决定的对应关系的
数据一起整合后得到的。相关数据rd
rt
被生成为能够由相关处理部35提供给更新处理部36的数据结构。
56.更新处理部36具有接收相关数据rd
rt
的功能。更新处理部36具有基于检测点dp的位置p和候补点dph的位置hp更新航迹数据td
rt
的功能。更新航迹数据td
rt
的功能的详细情况将在后文中阐述。
57.通知控制装置4具有接收航迹数据td
rt
的功能。通知控制装置4具有基于航迹数据td
rt
生成通知数据的功能。通知数据是确定通知内容的数据,并且以对应于输出目的地的设备的格式生成。通知控制装置4通过将通知数据输出到未图示的显示器,从而使显示器通知通知数据的内容。由此,通知数据的内容以视觉方式通知给在车厢内的驾驶员。通知控制装置4通过将通知数据输出到扬声器,从而使扬声器通知通知数据的内容。由此,通知数据的内容以听觉方式通知给在车厢内的驾驶员。
58.车辆控制装置5具有接收由更新处理部36输出的航迹数据td
rt
的功能。车辆控制装置5具有基于航迹数据td
rt
控制本车辆的动作的功能。车辆控制装置5基于航迹数据td
rt
控制本车辆的动作,以使得本车辆避开物体。
59.图2是示出图1的车外信息传感器1和物体之间的相对位置关系的一个示例的图。
60.这里,将正面观察车外信息传感器1时的位于中央的点设为原点o。通过原点o的左右方向的水平轴设为ys轴。ys轴中,当正面观察车外信息传感器1时,将右方向设定为正方向。通过原点o的上下方向的垂直轴设为zs轴。zs轴中,当正面观察车外信息传感器1时,将上方向设定为正方向。将通过原点o并且与ys轴和zs轴正交的前后方向的轴设为xs轴。xs轴中,将车外信息传感器1的前方设定为正方向。
61.如图2中的虚线所示,车外信息传感器1的可观测范围被划分为多个假想的分辨率单元。基于车外信息传感器1的分辨率确定分辨率单元。分辨率单元是通过根据车外信息传感器1的角度分辨率和距离分辨率分割车外信息传感器1的可观察范围来得到的。如上所述,车外信息传感器1的角度分辨率和距离分辨率根据车外信息传感器1的测量原理而不同。
62.各个分辨率单元由最小检测范围mr(i,j)确定。这里,i沿着以原点o为基准的周向确定分辨率单元的位置。j沿着以原点o为基准的同心圆的径向确定分辨率单元的位置。因此,i的数量根据车外信息传感器1的角度分辨率而变动。因此,随着车外信息传感器1的角度分辨率变得越高,i的最大数量越是增加。另一方面,j的数量根据车外信息传感器1的距离分辨率而变动。因此,随着车外信息传感器1的距离分辨率变得越高,j的最大数量越是增加。关于i的正负符号,以xs轴为基准的顺时针方向设为正的周向,以xs轴为基准的逆时针方向设为负的周向。
63.当车外信息传感器1检测到车辆ca时,检测点dp(ca)包含在最小检测范围mr(3,3)中。最小检测范围mr(3,3)设定为仅包含车辆ca的后方左侧的大小。因此,由于检测点dp(ca)的位置p与车辆ca之间的位置关系被确定,所以车辆ca上的检测点dp(ca)的位置p被确定在车辆ca的后方左侧。此外,由于检测点dp(ca)包含在最小检测范围mr(3,3)中,因此检测点dp(ca)相对于车外信息传感器1的位置p被确定为从车外信息传感器1到车辆ca的距离最短的最近点的位置p。
64.另一方面,当车外信息传感器1检测到车辆cb时,检测点dp(cb)包含在最小检测范
围mr(2,7)中。若沿着以原点o为基准的同心圆的径向进行比较,则与最小检测范围mr(3,3)相比,最小检测范围mr(2,7)远离原点o。最小检测范围mr(i,j),即分辨率单元沿着同心圆的径向越远离原点o,车外信息传感器1的角度分辨率越低。因此,最小检测范围mr(2,7)中的车外信息传感器1的角度分辨率低于最小检测范围mr(3,3)中的车外信息传感器1的角度分辨率。
65.此外,最小检测范围mr(2,7)被设定为包含车辆cb的整个后方的大小。因此,无法确定检测点dp(cb)的位置p是在车辆cb的整个后方中的哪个位置p。因此,无法确定检测点dp(cb)的位置p和车辆cb之间的位置关系。由此,无法确定车辆cb上的检测点dp(cb)的位置p。
66.因此,对用于确定车辆cb上的检测点dp(cb)的位置p的处理进行说明。
67.图3是示出成为与图2的车辆ca对应的车辆c
model1
上的检测点dp(c
model1
)的位置p的第一候补的候补点dph(1)的一个示例的图。当车外信息传感器1检测到车辆c
model1
作为物体时,检测点dp(c
model1
)包含在最小检测范围mr(3,3)中。最小检测范围mr(3,3)设定为仅包含车辆c
model1
的后方左侧的大小。因此,如上述说明的那样,假定最近点作为车辆c
model1
上的检测点dp(c
model1
)的位置p。假定最近点作为车辆c
model1
上的检测点dp(c
model1
)的位置p时,候补点dph(1)的位置hp成为车辆c
model1
上的检测点dp(c
model1
)的位置p的第1候补。
68.换句话说,在图3的一个示例中,候补点dph(1)的位置hp是车辆c
model1
上的检测点dp(c
model1
)的位置p的第一候补。
69.图4是示出成为与图2的车辆cb对应的车辆c
model1
上的检测点dp(c
model1
)的位置p的第二候补的候补点dph(2)的一个示例的图。当车外信息传感器1检测到车辆c
model1
作为物体时,检测点dp(c
model1
)包含在最小检测范围mr(2,7)中。最小检测范围mr(2,7)被设定为包含车辆c
model1
的整个后方的大小。因此,如上述说明的那样,无法确定检测点dp(c
model1
)的位置p是车辆c
model1
的整个后方中的哪个位置p。在无法确定检测点dp(c
model1
)的位置p是车辆c
model1
的整个后方中的哪个位置p时,候补点dph(2)的位置hp成为车辆c
model1
上的检测点dp(c
model1
)的位置p的第2候补。候补点dph(2)的位置hp假定为车辆c
model1
的后部的后表面中央点。后表面中央点是正面观察车辆c
model1
的后部时位于中央的点。
70.换句话说,在图4的一个示例中,候补点dph(2)的位置hp是车辆c
model1
上的检测点dp(c
model1
)的位置p的第二候补。
71.图5是表示成为车辆c
model1
中的检测点dp(c
model1
)的位置p的另一个候补的候补点dph(3)的一个示例的图。当车外信息传感器1检测到车辆c
model1
作为物体时,检测点dp(c
model1
)包含在最小检测范围mr(-1,7)中。例如,与最小检测范围mr(-1,3)相比,最小检测范围mr(-1,7)更远离原点o。因此,最小检测范围mr(-1,7)中的车外信息传感器1的角度分辨率低于最小检测范围mr(-1,3)中的车外信息传感器1的角度分辨率。
72.具体而言,最小检测范围mr(-1,7)设定为包含车辆c
model1
的整个前方的大小。因此,无法确定检测点dp(c
model1
)的位置p是在车辆c
model1
的整个前方中的哪个位置p。在无法确定检测点dp(c
model1
)的位置p是车辆c
model1
的整个前方中的哪个位置p时,候补点dph(3)的位置hp成为车辆c
model1
上的检测点dp(c
model1
)的位置p的另一个候补。候补点dph(3)的位置hp假定为车辆c
model1
的前部的前表面中央点。前表面中央点是正面观察车辆c
model1
的前部时的位于中央的点。
73.换句话说,在图5的一个示例中,候补点dph(3)的位置hp是车辆c
model1
上的检测点dp(c
model1
)的位置p的另一个候补。
74.参照图3和图4,当车外信息传感器1是监视本车辆前方的毫米波雷达时,候补点dph(1)和候补点dph(2)的各个位置hp成为车辆c
model1
上的检测点dp(c
model1
)的位置p的候补。
75.此外,参照图4,如果车外信息传感器1是监视本车辆前方的摄像头,则候补点dph(2)的位置hp成为车辆c
model1
上的检测点dp(c
model1
)的位置p的候补。
76.此外,若参照图3和图5,则当车外信息传感器1是监视本车辆后方的毫米波雷达时,候补点dph(1)和候补点dph(3)的各个位置hp成为车辆c
model1
上的检测点dp(c
model1
)的位置p的候补。
77.由此,检测点dp(c
model1
)的位置p的候补点dph为多个的情况下,如果不执行选择多个候补点dph(n)中的一个候补点dph的处理,则无法确定车辆c
model1
中的检测点dp(c
model1
)的位置p。因此,对从多个候补点dph(n)中选择一个候补点dph并采用为车辆c
model1
中的检测点dp(c
model1
)的位置p的候补的处理进行说明。
78.图6是表示将n设为自然数时从图3至图5的候补点dph(n)的可靠度dor(n)的设定例的图。在图6的一个示例中,对于可靠度dor(n),设定0以上1以下的实数。如上述说明的那样,如果车外信息传感器1是监视本车辆前方的毫米波雷达,则候补点dph(1)和候补点dph(2)成为车辆c
model1
上的检测点dp(c
model1
)的候补。
79.因此,通过比较针对候补点dph(1)的可靠度dor(1)和针对候补点dph(2)的可靠度dor(2),选择候补点dph(1)和候补点dph(2)中的任意一个,设定为车辆c
model1
上的检测点dp(c
model1
)的位置p的候补。由此,采用候补点dph(1)和候补点dph(2)中的任意一个。
80.具体地,如上述说明的那样,分辨率单元沿着同心圆的径向越远离原点o,车外信息传感器1的角度分辨率越低。换句话说,分辨率单元沿着同心圆的径向越接近原点o,车外信息传感器1的角度分辨率越高。
81.因此,如果从车外信息传感器1到检测点dp(c
model1
)的距离较近,则车辆c
model1
的后部不会被埋在分辨率单元中。因此,如果从车外信息传感器1到检测点dp(c
model1
)的距离较近,则可靠度dor较高。
82.换句话说,基于从车外信息传感器1到检测点dp的距离来求出候补点dph的可靠度dor。
83.因此,当从车外信息传感器1到检测点dp(c
model1
)的距离小于图6的判定阈值距离d
th1
时,针对候补点dph(1)的可靠度dor(1)被设定为1,针对候补点dph(2)的可靠度dor(2)被设定为0。此时,可靠度dor(1)比可靠度dor(2)的可靠度dor更高,因此选择可靠度dor(1)。当选择并设定可靠度dor(1)时,采用与可靠度dor(1)对应的候补点dph(1)。车辆c
model1
中的候补点dph(1)的位置hp是车辆c
model1
中的最近点的位置p。
84.因此,根据被采用的候补点dph(1)的位置hp,假定车辆c
model1
上的检测点dp(c
model1
)的位置p位于车辆c
model1
上的最近点的位置p。
85.换言之,在从车外信息传感器1到检测点dp(c
model1
)的距离小于图6的判定阈值距离d
th1
的情况下,在多个候补点dph(n)中,采用候补点dph(1)的位置hp作为车辆c
model1
上的检测点dp(c
model1
)的位置p的候补。由此,假定车辆c
model1
上的检测点dp(c
model1
)的位置p位于
车辆c
model1
上的最近点的位置p。
86.另一方面,如果从车外信息传感器1到检测点dp(c
model1
)的距离较远,则车辆c
model1
的后部也会埋在分辨率单元中。因此,如果从车外信息传感器1到检测点dp(c
model1
)的距离较远,则可靠度dor较低。
87.因此,当从车外信息传感器1到检测点dp(c
model1
)的距离为图6的判定阈值距离d
th2
以上时,针对候补点dph(1)的可靠度dor(1)被设定为0,针对候补点dph(2)的可靠度dor(2)被设定为1。此时,可靠度dor(2)比可靠度dor(1)的可靠度dor更高,因此选择可靠度dor(2)。当选择并设定可靠度dor(2)时,采用与可靠度dor(2)对应的候补点dph(2)。车辆c
model1
中的候补点dph(2)的位置hp是车辆c
model1
上的后表面中央点的位置p。
88.因此,根据被采用的候补点dph(2)的位置hp,假定车辆c
model1
上的检测点dp(c
model1
)的位置p位于车辆c
model1
上的后表面中央点的位置p。
89.换言之,在从车外信息传感器1到检测点dp(c
model1
)的距离为图6的判定阈值距离d
th2
以上的情况下,在多个候补点dph(n)中,采用候补点dph(2)的位置hp作为车辆c
model1
上的检测点dp(c
model1
)的位置p的候补。由此,假定车辆c
model1
上的检测点dp(c
model1
)的位置p位于车辆c
model1
上的后表面中央点的位置p。
90.另外,图6的判定阈值距离d
th1
被设定为沿着同心圆的径向的距原点o的距离中包含图3或图5的最小检测范围mr(3,3)的距离。也就是说,图6的判定阈值距离d
th1
被设定为沿着同心圆的径向的距原点o的距离中包含图3、图4以及图5的最小检测范围mr(i,3)的距离。
91.另一方面,图6的判定阈值距离d
th2
被设定为沿着同心圆的径向的距原点o的距离中包含图4的最小检测范围mr(2,7)的距离。也就是说,图6的判定阈值距离d
th2
被设定为沿着同心圆的径向的距原点o的距离中包含图3、图4以及图5的最小检测范围mr(i,7)的距离。
92.换言之,判定阈值距离d
th2
被设定为比判定阈值距离d
th1
更远离原点o的距离。具体而言,可靠度dor(1)在小于判定阈值距离d
th1
时设定为1,在判定阈值距离d
th1
之上时开始下降,在判断阈值距离d
th2
以上时设定为0。另一方面,可靠度dor(2)在小于判定阈值距离d
th1
时设定为0,在判定阈值距离d
th1
以上时开始上升,在判断阈值距离d
th2
以上时设定为1。由此,可靠度dor(1)及可靠度dor(2)分别被设定为在小于判定阈值距离d
th1
和判定阈值距离d
th2
以上时示出相互相反的趋势。基于车外信息传感器1的距离分辨率与角度分辨率的比率来分别决定判定阈值距离d
th1
以上和小于判定阈值距离d
th2
时的可靠度dor(1)和可靠度dor(2)。
93.图7是示出图1的航迹数据td的一个示例的图。航迹数据td包含车辆c
model2
上的中心点的位置p、车辆c
model2
上的中心点的速度v、车辆c
model2
的宽度w和车辆c
model2
的长度l这四个。车辆c
model2
上的中心点的位置p、车辆c
model2
上的中心点的速度v、车辆c
model2
的宽度w和车辆c
model2
的长度l这四个中,车辆c
model2
上的中心点的速度v、车辆c
model2
的宽度w和车辆c
model2
的长度l这三个是物体确定要素。车辆c
model2
上的中心点的位置p和车辆c
model2
上的中心点的速度v表示通过毫米波雷达或激光雷达可以观测到的物体的状态。车辆c
model2
的宽度w和车辆c
model2
的长度l表示通过摄像头可以观测到的物体的大小。
94.因此,航迹数据td是通过整合多个不同种类的车外信息传感器1的观测结果而形成的数据。例如,航迹数据td被构成为td(p,v,w,l)这样的矢量数据。
95.图8是示出图1的检测数据dd的校正例的图。包含于检测数据dd中的各物体确定要
素与包含于航迹数据td中的各物体确定要素相对应。具体而言,检测点dp相对于车外信息传感器1的位置p、检测点dp的速度v、车辆c
model2
的宽度w和车辆c
model2
的长度l中,检测点dp的速度v、车辆c
model2
的宽度w和车辆c
model2
的长度l作为物体确定要素包含于检测数据dd。
96.因此,例如检测数据dd与航迹数据td同样,作为dd(p,v,w,l)那样的矢量数据而构成。
97.图8的一个示例中,校正前的检测数据dd
before
中的检测点dp相对于车外信息传感器1的位置p基于候补点dph(1)的位置hp而被确定后,作为校正后的检测数据dd
after
而被校正为物体上的中心点。基于该检测数据dd
after
中包含的检测点dp相对于车外信息传感器1的校正后的位置p,图7的航迹数据td被更新。
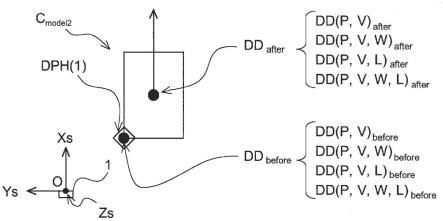
98.换言之,更新处理部36基于物体上的候补点dph的位置hp来校正检测点dp相对于车外信息传感器1的位置p,基于检测点dp相对于车外信息传感器1的校正后的位置p来更新表示物体航迹的航迹数据td。
99.具体而言,当对应于一个检测点dp的候补点dph的数量为多个的情况下,作为更新表示物体航迹的航迹数据td的前一阶段,更新处理部36基于多个候补点dph的各个可靠度dor和物体上的多个候补点dph的各个位置hp来校正检测点dp相对于车外信息传感器1的位置p。
100.更具体地,更新处理部36基于物体上的多个候补点dph中可靠度dor最高的候补点dph的位置hp来校正检测点dp相对于车外信息传感器1的位置p。
101.例如,可靠度dor最高的候补点dph为候补点dph(1)的情况下,采用候补点dph(1)。候补点dph(1)的位置hp如上述说明的那样,为车辆c
model2
上的最近点的位置p。由此,假定车辆c
model2
上的检测点dp的位置p成为车辆c
model2
上的最近点的位置p。
102.在图8的一个示例中,该最近点相当于车辆c
model2
上的后部左端。因此,车辆c
model2
上的后部左端的位置p的坐标以车外信息传感器1为原点o。车辆c
model2
上的后部左端的位置p的坐标由检测点dp相对于车外信息传感器1的位置p的坐标确定。如果车辆c
model2
上的后部左端的位置p的坐标确定,则通过使用由车外信息传感器1检测到的车辆c
model2
的宽度w和长度l来准确地确定从车辆c
model2
上的后部左端的位置p到车辆c
model2
上的中心点的校正量。由此,从检测点dp的位置p经由候补点dph(1)的位置hp来确定车辆c
model2
上的中心点的位置p。
103.具体而言,在校正前的检测数据dd
before
中包含的检测点dp相对于车外信息传感器1的位置p中,在xs轴方向的位置p
xs
加上车辆c
model2
的长度l的1/2。此外,在校正前的检测数据dd
before
中包含的检测点dp相对于车外信息传感器1的位置p中,从ys轴方向的位置p
ys
减去车辆c
model2
的宽度w的1/2。其结果是,从检测点dp的位置p经由候补点dph的位置hp来确定车辆c
model2
上的中心点的位置p。
104.此外,例如,可靠度dor最高的候补点dph为候补点dph(2)的情况下,采用候补点dph(2)。候补点dph(2)的位置hp如上述说明的那样,为后表面中央点的位置p。由此,假定车辆c
model2
上的检测点dp的位置p为车辆c
model2
上的后表面中央点的位置p。
105.因此,车辆c
model2
上的后表面中央点的位置p以车外信息传感器1为原点o。车辆c
model2
上的后表面中央点的位置p由检测点dp相对于车外信息传感器1的位置p的坐标确定。如果车辆c
model2
上的后表面中央点的位置p的坐标确定,则通过使用由车外信息传感器1检测到的车辆c
model2
的宽度w和由车外信息传感器1检测到的车辆c
model2
的长度l来准确地确定
从车辆c
model2
上的后表面中央点的位置p到车辆c
model2
上的中心点的校正量。由此,从检测点dp的位置p经由候补点dph(2)的位置hp来确定车辆c
model2
上的中心点的位置p。
106.具体而言,在校正前的检测数据dd
before
中包含的位置p中,在xs轴方向的位置p
xs
加上车辆c
model2
的长度l的1/2。此外,在校正前的检测数据dd
before
中包含的位置p中,对于在ys轴方向的位置p
ys
由于采用候补点dph(2),所以保持不变。其结果是,从检测到的检测点dp的位置p经由候补点dph(2)的位置hp来确定车辆c
model2
上的中心点的位置p。
107.换言之,更新处理部36将物体中的检测点dp的位置p假定为所选择的候补点dph的位置hp。由此,物体上的检测点dp的位置p确定为候补点dph的位置hp。其结果是,通过确定物体和检测点dp的位置p的位置关系,确定物体上的检测点dp的位置p。
108.此外,观测检测点dp相对于车外信息传感器1的位置p。因此,如果确定了物体上的检测点dp的位置p和物体的中心点的位置p的位置关系,检测点dp相对于车外信息传感器1的位置p能校正为物体的中心点的位置p。
109.因此,更新处理部36求出用于将物体中所确定的检测点dp的位置p校正为物体的中心点的位置p的校正量。
110.更新处理部36通过使用所求出的校正量,将物体中的检测点dp的位置p校正为物体的中心点的位置p。由此,更新处理部36校正检测点dp相对于车外信息传感器1的位置p。更新处理部36基于检测点dp相对于车外信息传感器1的校正后的位置p来更新表示物体航迹的航迹数据td。
111.但是,详细情况如上述说明的那样,根据车外信息传感器1的种类,具体而言,根据车外信息传感器1的测量原理,可观测的检测数据dd中包含的物体确定要素不同。物体确定要素如上述说明的那样确定物体的状态和大小中的至少一个。
112.因此,更新处理部36基于确定物体的状态和大小中的至少一个的物体确定要素,校正检测点dp相对于车外信息传感器1的位置p。更新处理部36基于检测点dp相对于车外信息传感器1的校正后的位置p来更新航迹数据td。
113.例如,检测数据dd中仅包含检测点dp相对于车外信息传感器1的位置p和检测点dp的速度v的情况下,假定检测点dp的位置p为候补点dph的位置hp。由此,经由候补点dph的位置hp,确定检测点dp的位置p和车辆c
model2
的位置关系。其结果是,由于车辆c
model2
上的检测点dp的位置p被确定,经由车辆c
model2
上的检测点dp的位置p求出将检测点dp相对于车外信息传感器1的位置p校正为车辆c
model2
上的中心点的位置p的校正量。使用该校正量,通过将车辆c
model2
上的检测点dp的位置p校正为车辆c
model2
上的中心点的位置p来校正检测点dp相对于车外信息传感器1的位置p。这个中心点的位置p是检测点dp相对于车外信息传感器1的校正后的位置p。基于该中心点的位置p来更新航迹数据td。
114.此外,例如,在检测数据dd中仅包含检测点dp相对于车外信息传感器1的位置p、检测点dp的速度v和车辆c
model2
宽度w的情况下,对于检测点dp的ys轴方向的位置p
ys
,被确定为车辆c
model2
的ys轴方向的中央点的位置p,对于检测点dp的xs轴方向的位置p
xs
,假定为候补点dph的xs轴方向的位置p
xs
。由此,经由车辆c
model2
上的ys轴方向的中央点的位置p和候补点dph的xs轴方向的位置p
xs
,确定检测点dp的位置p和车辆c
model2
的位置关系。其结果是,由于车辆c
model2
上的检测点dp的位置p被确定,因此经由车辆c
model2
上的检测点dp的位置p求出将检测点dp相对于车外信息传感器1的位置p校正为车辆c
model2
上的中心点的位置p的校正量。
使用该校正量,通过将车辆c
model2
上的检测点dp的位置p校正为车辆c
model2
上的中心点的位置p来校正检测点dp相对于车外信息传感器1的位置p。这个中心点的位置p是检测点dp相对于车外信息传感器1的校正后的位置p。基于该中心点的位置p来更新航迹数据td。
115.此外,例如,在检测数据dd中仅包含检测点dp相对于车外信息传感器1的位置p、检测点dp的速度v和车辆c
model2
的长度l的情况下,对于检测点dp的xs轴方向的位置p
xs
,确定为车辆c
model2
的xs轴方向的中央点的位置p,对于检测点dp的ys轴方向的位置p
ys
,确定为候补点dph的ys轴方向的位置p
ys
。由此,经由车辆c
model2
上的xs轴方向的中央点的位置p和候补点dph的ys轴方向的位置p
ys
,确定检测点dp的位置p和车辆c
model2
的位置关系。其结果是,由于车辆c
model2
上的检测点dp的位置被确定,因此经由车辆c
model2
上的检测点dp的位置p求出将检测点dp相对于车外信息传感器1的位置p校正为车辆c
model2
上的中心点的位置p的校正量。使用该校正量,通过将车辆c
model2
上的检测点dp的位置p校正为车辆c
model2
上的中心点的位置p来校正检测点dp相对于车外信息传感器1的位置p。这个中心点的位置p是检测点dp相对于车外信息传感器1的校正后的位置p。基于该中心点的位置p来更新航迹数据td。
116.此外,例如,在检测数据dd中仅包含检测点dp相对于车外信息传感器1的位置p、检测点dp的速度v、车辆c
model2
的宽度w和长度l的情况下,对于检测点dp的ys轴方向的位置p
ys
,确定为车辆c
model2
上的ys轴方向的中央点的位置p,对于检测点dp的xs轴方向的位置p
xs
,确定为车辆c
model2
的xs轴方向的中央点的位置p。由此,经由车辆c
model2
上的ys轴方向的中央点的位置p和车辆c
model2
上的xs轴方向的中央点的位置p,确定检测点dp的位置p和车辆c
model2
的位置关系。其结果是,由于车辆c
model2
上的检测点dp的位置p被确定,因此经由车辆c
model2
上的检测点dp的位置p求出将检测点dp相对于车外信息传感器1的位置p校正为车辆c
model2
上的中心点的位置p的校正量。使用该校正量,通过将车辆c
model2
上的检测点dp的位置p校正为车辆c
model2
上的中心点的位置p来校正检测点dp相对于车外信息传感器1的位置p。这个中心点的位置p是检测点dp相对于车外信息传感器1的校正后的位置p。基于该中心点的位置p来更新航迹数据td。
117.航迹数据td具体通过最小二乘法、卡尔曼滤波器、粒子滤波器等跟踪处理进行更新。
118.另外,也可以不使用可靠度dor最高的候补点dph的位置hp,而使用对多个候补点dph的各个位置p用可靠度dor加权平均后的候补点dph的位置hp。具体而言,更新处理部36根据各个可靠度dor,对物体中的多个候补点dph的各个位置p进行加权平均,从而校正检测点dp相对于车外信息传感器1的位置p。
119.接着,对通过组合检测数据dd中包含的物体确定要素和航迹数据td中包含的物体确定要素来改变航迹数据td的更新内容的一个示例进行说明。图9是示出基于图8的检测数据dd的图7的航迹数据的更新例的图。在图9的一个示例中,对应于无法从车外信息传感器1获取的物体确定要素而预先单独设置设定值。另外,在无法从车外信息传感器1获取的情况下,处理为没有物体确定要素。
120.更新处理部36在能够从车外信息传感器1获取物体的宽度w和长度l中的至少一个作为物体确定要素的情况下,如果检测数据dd和航迹数据td具有相关性,则基于从车外信息传感器1获取到的物体确定要素来更新航迹数据td。
121.另一方面,更新处理部36在无法从车外信息传感器1获取物体的宽度w和长度l中
的至少一个作为物体确定要素的情况下,基于对应于物体的宽度w和长度l的每一个而单独预先设定的设定值中的对应于无法从车外信息传感器1获取的物体确定要素的设定值来确定无法从车外信息传感器1获取的物体确定要素的值。
122.图10是示出在图7的航迹数据td中还包含方向θ的一个示例的图。车辆c
model2
的宽度w为与车辆c
model2
的方向θ垂直的车辆c
model2
的大小。车辆c
model2
的长度l为与车辆c
model2
的方向θ平行的车辆c
model2
的大小。
123.根据车外信息传感器1的测量原理,当可以获取车辆c
model2
的方向θ时,追加车辆c
model2
的方向θ作为检测数据dd的物体确定要素。根据车外信息传感器1的测量原理,当无法获取车辆c
model2
的方向θ时,根据车辆c
model2
,即物体的对地速度改变方向θ的设定。
124.物体的对地速度不为零时,车辆c
model2
的方向θ是可以观测的,因此可以获取作为对地速度矢量的方向。另一方面,当物体的对地速度为零,即物体是静止物体时,初始角度0[deg]作为预先设定的设定值被包含在临时设定数据dh中。
[0125]
图11是示出在图7的航迹数据td中还包含高度h的一个示例的图。车辆c
model2
的方向θ与路面rs平行,与车辆c
model2
的高度h垂直。
[0126]
根据车外信息传感器1的测量原理,当可以获取车辆c
model2
的高度h时,追加车辆c
model2
的高度h作为检测数据dd的物体确定要素。根据车外信息传感器1的测量原理,当无法获取车辆c
model2
的高度h时,初始高度1.5[m]作为预先设定的设定值被包含在临时设定数据dh中。
[0127]
图12是示出图7的航迹数据td还包括上端zh的位置和下端z
l
的位置的一个示例的图。其中,上端zh的位置≥下端z
l
的位置。此处,当下端z
l
的位置大于0[m]时,判定为物体是如标示板或道路标识那样存在于物体上方的物。
[0128]
当根据车外信息传感器1的测量原理可以获取上端zh的位置和下端z
l
的位置时,追加上端zh的位置和下端z
l
的位置作为检测数据dd的检测要素。当根据车外信息传感器1的测量原理无法获取上端zh的位置和下端z
l
的位置时,初始上端z
hdef
=1.5[m]和初始下端z
ldef
=0[m]作为预先设定的设定值包含在临时设定数据dh中。
[0129]
图13是说明由图1的物体识别装置3进行的处理的流程图。在步骤s11,时刻测量部31判定当前时刻是否已经到达处理时刻tk。在由时刻测量部31判定当前时刻已到达处理时刻tk的情况下,步骤s11中的处理转移到步骤s12的处理。在由时刻测量部31判定当前时刻没有到达处理时刻tk的情况下,继续步骤s11的处理。
[0130]
在步骤s12中,数据接收部32从各个车外信息传感器1接收检测数据dd。接着,步骤s12的处理转移到步骤s13的处理。
[0131]
在步骤s13中,数据接收部32将从各个车外信息传感器1接收到检测数据dd的时刻作为本次的关联时刻rt与检测数据dd相关联。接着,步骤s13的处理转移到步骤s14的处理。
[0132]
在步骤s14,数据接收部32将所有的车外信息传感器1标记为未使用。接着,步骤s14的处理转移到步骤s15的处理。
[0133]
在步骤s15,数据接收部32判定是否存在未使用的车外信息传感器1。当由数据接收部32判定存在未使用的车外信息传感器1时,步骤s15的处理转移到步骤s16的处理。在由数据接收部32判定不存在未使用的车外信息传感器1时,步骤s15的处理不转移到其它处理,处理结束。
[0134]
在步骤s16中,预测处理部34根据在前一次关联时刻rt的航迹数据td计算在本次关联时刻rt的航迹数据td的预测数据td
rtpred
。接着,步骤s16的处理转移到步骤s17的处理。
[0135]
在步骤s17中,临时设定部33选择使用的车外信息传感器1。接着,步骤s17的处理转移到步骤s18的处理。
[0136]
在步骤s18中,临时设定部33基于所选择的车外信息传感器1的分辨率,设定所选择的车外信息传感器1检测到的物体上的至少一个候补点dph的位置hp。接着,步骤s18的处理转移到步骤s19的处理。
[0137]
在步骤s19中,相关处理部35判定检测数据dd
rt
和航迹数据td的预测数据td
rtpred
是否具有相关性。在相关处理部35判定检测数据dd
rt
和航迹数据td的预测数据td
rtpred
具有相关性的情况下,步骤s19的处理转移到步骤s20的处理。在相关处理部35判定检测数据dd
rt
和航迹数据td的预测数据td
rtpred
不具有相关性的情况下,步骤s19的处理转移到步骤s22的处理。
[0138]
在步骤s20,更新处理部36使用图14执行后述的位置校正处理。接着,步骤s20的处理转移到步骤s21的处理。
[0139]
在步骤s21中,更新处理部36基于在本次关联时刻rt检测点dp相对于车外信息传感器1的校正后的位置p,更新在本次关联时刻rt的航迹数据td。接着,步骤s21的处理转移到步骤s22的处理。
[0140]
在步骤s22中,临时设定部33判定检测数据dd中是否包含物体确定要素。在临时设定部33判定检测数据dd中包含物体确定要素的情况下,步骤s22的处理转移到使用图15后述的步骤s51的处理。在临时处理部33判定检测数据dd中不包含物体确定要素时,步骤s22的处理转移到步骤s23的处理。
[0141]
在步骤s23,数据接收部32将所选择的车外信息传感器1标记为已使用。接着,步骤s23的处理转移到步骤s15的处理。
[0142]
图14是说明图13的步骤s20中的位置校正处理的流程图。在步骤s31,更新处理部36判定候补点dph的数量是否为多个。在更新处理部36判定候补点dph的数量是多个时,步骤s31中的处理转移到步骤s32中的处理。在更新处理部36判定候补点dph的数量不是多个时,步骤s31的处理转移到步骤s37的处理。
[0143]
在步骤s32中,更新处理部36基于从所选择的车外信息传感器1到检测点dp的距离来求出多个候补点dph的各个可靠度dor。接着,步骤s32的处理转移到步骤s33的处理。
[0144]
在步骤s33,更新处理部36判定是否执行加权平均。在临时设定部33判定为执行加权平均时,步骤s33的处理转移到步骤s34的处理。在临时设定部33判定为不执行加权平均时,步骤s33的处理转移到步骤s36的处理。
[0145]
在步骤s34,更新处理部36根据各个可靠度dor,对物体中的多个候补点dph的各个位置p进行加权平均,从而求出检测点dp相对于车外信息传感器1的位置p的校正量。接着,步骤s34的处理转移到步骤s35的处理。
[0146]
在步骤s35,更新处理部36基于检测点dp相对于车外信息传感器1的位置p的校正量来校正本次关联时刻rt的检测数据dd中包含的检测点dp相对于车外信息传感器1的位置p。接着,步骤s35的处理不转移到其它处理,结束位置校正处理。
[0147]
在步骤s36,更新处理部36基于多个候补点dph的位置hp中可靠度dor最高的候补
点dph的位置hp来求出检测点dp相对于车外信息传感器1的位置p的校正量。接着,步骤s36的处理转移到步骤s35的处理。
[0148]
在步骤s37,更新处理部36采用所设定的候补点dph。接着,步骤s37的处理转移到步骤s38的处理。
[0149]
在步骤s38,更新处理部36基于所采用的候补点dph的位置hp来求出检测点dp相对于车外信息传感器1的位置p的校正量。接着,步骤s38的处理转移到步骤s35的处理。
[0150]
图15是说明根据图13的步骤s22中的判定处理的判定结果为是的情况而被分支的处理的流程图。在步骤s51,临时设定部33判定从所选择的车外信息传感器1接收的检测数据dd中是否包含检测点dp的速度v。临时设定部33判定从所选择的车外信息传感器1接收的检测数据dd中包含检测点dp的速度v的情况下,步骤s51的处理转移到步骤s52的处理。临时设定部33判定从所选择的车外信息传感器1接收的检测数据dd中不包含检测点dp的速度v的情况下,步骤s51的处理转移到使用图16后述的步骤s81的处理。
[0151]
在步骤s52中,相关处理部35判定检测数据dd
rt
和航迹数据td的预测数据td
rtpred
是否具有相关性。在相关处理部35判定检测数据dd
rt
和航迹数据td的预测数据td
rtpred
具有相关性的情况下,步骤s52的处理转移到步骤s53的处理。在相关处理部35判定检测数据dd
rt
和航迹数据td的预测数据td
rtpred
不具有相关性的情况下,步骤s52的处理转移到步骤s54的处理。
[0152]
在步骤s53,更新处理部36基于本次关联时刻rt的检测点dp的速度v来更新本次关联时刻rt的航迹数据td中包含的物体上的中心点的速度v。接着,步骤s53的处理转移到步骤s54的处理。
[0153]
在步骤s54,临时设定部33判定从所选择的车外信息传感器1接收的检测数据dd中是否包含其他的物体确定要素。临时设定部33判定从所选择的车外信息传感器1接收的检测数据dd中包含其他的物体确定要素的情况下,步骤s54的处理转移到用图16后述的步骤s81的处理。临时设定部33判定从所选择的车外信息传感器1接收的检测数据dd中不包含其他的物体确定要素的情况下,步骤s54的处理转移到步骤s55的处理。
[0154]
在步骤s55,数据接收部32将所选择的车外信息传感器1标记为已使用。接着,步骤s55的处理返回图13的步骤s15的处理。
[0155]
图16是说明根据图15的步骤s51中的判定处理的判定结果为否的情况和步骤s54中的判定处理的判定结果为是的情况而被分支的处理的流程图。在步骤s81,临时设定部33判定从所选择的车外信息传感器1接收的检测数据dd中包含的残留的物体确定要素即物体的宽度w和长度l中的至少一个作为物体确定要素是否已从车外信息传感器1获取。临时设定部33判定从所选择的车外信息传感器1接收的检测数据dd中包含的残留的物体确定要素即物体的宽度w和长度l中的至少一个作为物体确定要素已从车外信息传感器1获取的情况下,步骤s81的处理转移到步骤s82的处理。临时设定部33判定从所选择的车外信息传感器1接收的检测数据dd中包含的残留的物体确定要素即物体的宽度w和长度l中的至少一个作为物体确定要素未能从车外信息传感器1获取的情况下,步骤s81的处理转移到步骤s85的处理。
[0156]
在步骤s82中,相关处理部35判定检测数据dd
rt
和航迹数据td的预测数据td
rtpred
是否具有相关性。在相关处理部35判定检测数据dd
rt
和航迹数据td的预测数据td
rtpred
具有相
关性的情况下,步骤s82的处理转移到步骤s83的处理。在相关处理部35判定检测数据dd
rt
和航迹数据td的预测数据td
rtpred
不具有相关性的情况下,步骤s82的处理转移到步骤s84的处理。
[0157]
在步骤s83,更新处理部36基于本次关联时刻rt的物体的宽度w和长度l中从车外信息传感器1获取到的物体确定要素来更新本次关联时刻rt的航迹数据td中包含的物体确定要素中与从车外信息传感器1获取到的物体确定要素对应的物体确定要素。接着,步骤s83的处理转移到步骤s84的处理。
[0158]
在步骤s84,数据接收部32将所选择的车外信息传感器1标记为已使用。接着,步骤s84的处理返回图13的步骤s15的处理。
[0159]
在步骤s85,更新处理部36基于分别对应于物体的宽度w和长度l而预先单独设定的设定值中对应于无法从车外信息传感器1获取的物体确定要素的设定值来确定无法从车外信息传感器1获取的物体确定要素。接着,步骤s85的处理转移到步骤s86的处理。
[0160]
在步骤s86,更新处理部36基于所确定的物体确定要素的值来更新本次关联时刻rt的航迹数据td中包含的物体确定要素中对应于所确定的物体确定要素的物体确定要素。接着,步骤s86的处理转移到步骤s84的处理。
[0161]
根据以上说明,在物体识别装置3中,临时设定部33基于检测到物体的车外信息传感器1的规格来设定物体中的至少一个候补点dph的位置hp。此外,物体识别装置3中,更新处理部36基于物体上的候补点dph的位置hp来校正车外信息传感器1检测到物体时检测点dp相对于车外信息传感器1的位置。更新处理部36基于检测点dp相对于车外信息传感器1的校正后的位置p来更新表示物体航迹的航迹数据td。
[0162]
车外信息传感器1如上述说明的那样,根据车外信息传感器1的规格而具有不同的分辨率。因此,更新处理部36在更新航迹数据td的前一阶段,基于候补点dph的位置校正检测点dp的位置p。临时设定部33在由更新处理部36校正检测点dp的位置p的前一阶段,基于检测到物体的车外信息传感器1的规格来设定物体上的至少一个候补点dph的位置hp。因此,基于校正了由车外信息传感器1的规格中包含的分辨率引起的偏差的检测点dp相对于车外信息传感器1的校正后的位置p,可以更新航迹数据td。由此,能够提高物体的航迹数据td的精度。
[0163]
更新处理部36在对应于一个检测点dp的候补点dph的数量为多个的情况下,基于多个候补点dph的各个可靠度dor和物体上的多个候补点dph的各个位置p来校正检测点dp相对于车外信息传感器1的位置p。因此,在还考虑候补点dph的位置hp的可靠度dor的基础上,校正检测点dp相对于车外信息传感器1的位置p。由此,能有效地利用多个候补点dph中的每一个。
[0164]
此外,更新处理部36基于物体中的多个候补点dph的位置hp中可靠度dor最高的候补点dph的位置hp来校正检测点dp相对于车外信息传感器1的位置p。
[0165]
如果一个物体中的候补点dph为多个,则一个物体中的多个候补点dph的位置hp的各个设定精度有可能不同。由此,更新处理部36基于一个物体中的多个候补点dph的位置hp中可靠度dor最大的候补点dph的位置hp来校正检测点dp相对于车外信息传感器1的位置p。因此,能利用一个物体中的设定精度最高的候补点dph的位置hp。由此,能利用基于同一车外信息传感器1的分辨率设定的一个物体中的多个候补点dph的位置hp中设定精度最高的
候补点dph的位置hp。
[0166]
此外,更新处理部36根据各个可靠度dor,对一个物体中的多个候补点dph的各个位置p进行加权平均,从而校正检测点dp相对于车外信息传感器1的位置p。
[0167]
如果一个物体中的候补点dph为多个,则一个物体中的多个候补点dph的位置hp的各个设定精度不同。因此,更新处理部36对一个物体上的多个候补点dph的位置hp进行加权平均,从而校正检测点dp相对于车外信息传感器1的位置p。因此,在一个物体上的多个候补点dph中,减弱可靠度dor较低的候补点dph的影响,增强可靠度dor较高的候补点dph的影响,在此基础上,能校正检测点dp相对于车外信息传感器1的位置p。由此,能在反映基于同一车外信息传感器1的分辨率设定的一个物体中的多个候补点dph的位置hp的各个可靠度dor的基础上,校正检测点dp相对于车外信息传感器1的位置p。
[0168]
此外,更新处理部36基于从车外信息传感器1到检测点dp的距离来求出各可靠度dor。
[0169]
车外信息传感器1的分辨率根据从车外信息传感器1到检测点dp的检测点dp的距离而成为不同的分辨率。例如,当车外信息传感器1由毫米波雷达构成时,如果到检测点dp的距离较近,则检测点dp是最近点的可能性较高。另一方面,如果到检测点dp的距离较远,则检测点dp会埋入分辨率单元中。由此,检测点dp被假定为从物体的中央反射的反射点。因此,更新处理部36基于从车外信息传感器1到检测点dp的距离来求出各可靠度。由此,能基于车外信息传感器1的性能求出可靠度dor。
[0170]
此外,更新处理部36在无法从车外信息传感器1获取物体的宽度w和长度l中的至少一个作为物体确定要素的情况下,基于分别对应于物体的宽度w和长度l而预先单独设定的设定值中对应于无法从车外信息传感器获取的物体确定要素的设定值来确定无法从车外信息传感器获取的物体确定要素的值。
[0171]
因此,即使无法从车外信息传感器1获取物体的宽度w和长度l,也能抑制误差并更新航迹数据td。由此,不会使本车辆与物体的相对位置关系大幅偏离,因而能将本车辆自动驾驶精度的降低抑制到最小限度。
[0172]
实施方式2.在实施方式2中,对于与实施方式1相同或相同的构成及功能,省略其说明。实施方式2与实施方式1不同之处在于根据图15的步骤s51中的判定处理的判定结果为否的情况和步骤s54中的判定处理的判定结果为是的情况而被分支的处理。其它结构与实施方式1相同。即,其他结构是与实施方式1相同或等同的结构及功能,对这些部分标注相同的标号。
[0173]
图17是说明实施方式2所涉及的根据图15的步骤s51中的判定处理的判定结果为否的情况和步骤s54中的判定处理的判定结果为是的情况而被分支的处理的流程图。在步骤s91,临时设定部33判定从所选择的车外信息传感器1接收的检测数据dd中包含的残留的物体确定要素即物体的宽度w、长度l和方向θ中的至少一个作为物体确定要素是否已从车外信息传感器1获取。临时设定部33判定从所选择的车外信息传感器1接收的检测数据dd中包含的残留的物体确定要素即物体的宽度w、长度l和方向θ中的至少一个作为物体确定要素已从车外信息传感器1获取的情况下,步骤s91的处理转移到步骤s92的处理。临时设定部33判定从所选择的车外信息传感器1接收的检测数据dd中包含的残留的物体确定要素即物体的宽度w、长度l和方向θ中的至少一个作为物体确定要素无法从车外信息传感器1获取的
情况下,步骤s91的处理转移到步骤s95的处理。
[0174]
在步骤s92中,相关处理部35判定检测数据dd
rt
和航迹数据td的预测数据td
rtpred
是否具有相关性。在相关处理部35判定检测数据dd
rt
和航迹数据td的预测数据td
rtpred
具有相关性的情况下,步骤s92的处理转移到步骤s93的处理。在相关处理部35判定检测数据dd
rt
和航迹数据td的预测数据td
rtpred
不具有相关性的情况下,步骤s92的处理转移到步骤s94的处理。
[0175]
在步骤s93,更新处理部36基于本次关联时刻rt的物体的宽度w、长度l和方向θ中从车外信息传感器1获取到的物体确定要素来更新本次关联时刻rt的航迹数据td中包含的物体确定要素中与从车外信息传感器1获取到的物体确定要素对应的物体确定要素。接着,步骤s93的处理转移到步骤s94的处理。
[0176]
在步骤s94,数据接收部32将所选择的车外信息传感器1标记为已使用。接着,步骤s94的处理返回图13的步骤s15的处理。
[0177]
在步骤s95,更新处理部36基于分别对应于物体的宽度w、长度l和方向θ而预先单独设定的设定值中对应于无法从车外信息传感器1获取的物体确定要素的设定值来确定无法从车外信息传感器1获取的物体确定要素。接着,步骤s95的处理转移到步骤s96的处理。
[0178]
在步骤s96,更新处理部36基于所确定的物体确定要素的值来更新本次关联时刻rt的航迹数据td中包含的物体确定要素中与所确定的物体确定要素对应的物体确定要素。接着,步骤s96的处理转移到步骤s94的处理。
[0179]
如上所述,在物体识别装置3中,更新处理部36在无法从车外信息传感器1获取物体的宽度w、长度l和方向θ中的至少一个作为物体确定要素的情况下,基于分别对应于物体的宽度w、长度l和方向θ而预先单独设定的设定值中对应于无法从车外信息传感器1获取的物体确定要素的设定值来确定无法从车外信息传感器1获取的物体确定要素的值。
[0180]
因此,即使无法从车外信息传感器1获取物体的宽度w、长度l和方向θ,也能抑制误差并更新航迹数据td。由此,不会使本车辆与物体的相对位置关系大幅偏离,因而能将本车辆自动驾驶精度的降低抑制到最小限度。
[0181]
实施方式3.在实施方式3中,对于与实施方式1以及实施方式2相同或等同的结构及功能,省略其说明。实施方式3与实施方式1以及实施方式2不同之处在于,根据图15的步骤s51中的判定处理的判定结果为否的情况和步骤s54中的判定处理的判定结果为是的情况而被分支的处理。其他结构与实施方式1以及实施方式2相同。即,其他结构是与实施方式1以及实施方式2相同或等同的结构及功能,对这些部分标注相同的标号。
[0182]
图18是说明实施方式3所涉及的根据图15的步骤s51中的判定处理的判定结果为否的情况和步骤s54中的判定处理的判定结果为是的情况而被分支的处理的流程图。在步骤s101,临时设定部33判定从所选择的车外信息传感器1接收的检测数据dd中包含的残留的物体确定要素即物体的宽度w、长度l、方向θ和高度h中的至少一个作为物体确定要素是否已从车外信息传感器1获取。临时设定部33判定从所选择的车外信息传感器1接收的检测数据dd中包含的残留的物体确定要素即物体的宽度w、长度l、方向θ和高度h中的至少一个作为物体确定要素已从车外信息传感器1获取的情况下,步骤s101的处理转移到步骤s102的处理。临时设定部33判定从所选择的车外信息传感器1接收的检测数据dd中包含的残留
的物体确定要素即物体的宽度w、长度l、方向θ和高度h中的至少一个作为物体确定要素未能从车外信息传感器1获取的情况下,步骤s101的处理转移到步骤s105的处理。
[0183]
在步骤s102中,相关处理部35判定检测数据dd
rt
和航迹数据td的预测数据td
rtpred
是否具有相关性。在相关处理部35判定检测数据dd
rt
和航迹数据td的预测数据td
rtpred
具有相关性的情况下,步骤s102的处理转移到步骤s103的处理。在相关处理部35判定检测数据dd
rt
和航迹数据td的预测数据td
rtpred
不具有相关性的情况下,步骤s102的处理转移到步骤s104的处理。
[0184]
在步骤s103,更新处理部36基于本次关联时刻rt的物体的宽度w、长度l、方向θ和高度h中从车外信息传感器1获取到的物体确定要素来更新本次关联时刻rt的航迹数据td中包含的物体确定要素中与从车外信息传感器1获取到的物体确定要素对应的物体确定要素。接着,步骤s103的处理转移到步骤s104的处理。
[0185]
在步骤s104,数据接收部32将所选择的车外信息传感器1标记为已使用。接着,步骤s104的处理返回图13的步骤s15的处理。
[0186]
在步骤s105,更新处理部36基于分别对应于物体的宽度w、长度l、方向θ和高度h而预先单独设定的设定值中对应于无法从车外信息传感器1获取的物体确定要素的设定值来确定无法从车外信息传感器1获取的物体确定要素。接着,步骤s105的处理转移到步骤s106的处理。
[0187]
在步骤s106,更新处理部36基于所确定的物体确定要素的值来更新本次关联时刻rt的航迹数据td中包含的物体确定要素中与所确定的物体确定要素对应的物体确定要素。接着,步骤s106的处理转移到步骤s104的处理。
[0188]
如上所述,物体识别装置3中,更新处理部36在无法从车外信息传感器1获取物体的宽度w、长度l、方向θ和高度h中的至少一个作为物体确定要素的情况下,基于分别对应于物体的宽度w、长度l、方向θ和高度h而预先单独设定的设定值中与无法从车外信息传感器1获取的物体确定要素对应的设定值来确定无法从车外信息传感器1获取的物体确定要素的值。
[0189]
因此,即使无法从车外信息传感器1获取物体的宽度w、长度l、方向θ和高度h,也能抑制误差并更新航迹数据td。由此,不会使本车辆与物体的相对位置关系大幅偏离,因而能将本车辆自动驾驶精度的降低抑制到最小限度。
[0190]
实施方式4.在实施方式4中,对于与实施方式1、实施方式2以及实施方式3相同或等同的结构及功能,省略其说明。实施方式4与实施方式1、实施方式2以及实施方式3不同之处在于,根据图15的步骤s51中的判定处理的判定结果为否的情况和步骤s54中的判定处理的判定结果为是的情况而被分支的处理。其他结构与实施方式1、实施方式2以及实施方式3相同。即,其他结构是与实施方式1、实施方式2以及实施方式3相同或等同的结构及功能,对这些部分标注相同的标号。
[0191]
图19是说明实施方式4所涉及的根据图15的步骤s51中的判定处理的判定结果为否的情况和步骤s54中的判定处理的判定结果为是的情况而被分支的处理的流程图。在步骤s111,临时设定部33判定从所选择的车外信息传感器1接收的检测数据dd中包含的残留的物体确定要素即物体的宽度w、长度l、方向θ、上端zh的位置p和下端z
l
的位置p中的至少一
个作为物体确定要素是否已从车外信息传感器1获取。临时设定部33判定从所选择的车外信息传感器1接收的检测数据dd中包含的残留的物体确定要素即物体的宽度w、长度l、方向θ、上端zh的位置p和下端z
l
的位置p中的至少一个作为物体确定要素已从车外信息传感器1获取的情况下,步骤s111的处理转移到步骤s112的处理。临时设定部33判定从所选择的车外信息传感器1接收的检测数据dd中包含的残留的物体确定要素即物体的宽度w、长度l、方向θ、上端zh的位置p和下端z
l
的位置p中的至少一个作为物体确定要素未能从车外信息传感器1获取的情况下,步骤s111的处理转移到步骤s115的处理。
[0192]
在步骤s112中,相关处理部35判定检测数据dd
rt
和航迹数据td的预测数据td
rtpred
是否具有相关性。在相关处理部35判定检测数据dd
rt
和航迹数据td的预测数据td
rtpred
具有相关性的情况下,步骤s112的处理转移到步骤s113的处理。在相关处理部35判定检测数据dd
rt
和航迹数据td的预测数据td
rtpred
不具有相关性的情况下,步骤s112的处理转移到步骤s114的处理。
[0193]
在步骤s113,更新处理部36基于本次关联时刻rt的物体的宽度w、长度l、方向θ、上端zh的位置和下端z
l
的位置中已从车外信息传感器1获取到的物体确定要素来更新本次关联时刻rt的航迹数据td中包含的物体确定要素中与从车外信息传感器1获取到的物体确定要素对应的物体确定要素。接着,步骤s113的处理转移到步骤s114的处理。
[0194]
在步骤s114,数据接收部32将所选择的车外信息传感器1标记为已使用。接着,步骤s114的处理返回图13的步骤s15的处理。
[0195]
在步骤s115,更新处理部36基于分别对应于物体的宽度w、长度l、方向θ、上端zh的位置和下端z
l
的位置而预先单独设定的设定值中与无法从车外信息传感器1获取的物体确定要素对应的设定值来确定无法从车外信息传感器1获取的物体确定要素。接着,步骤s115的处理转移到步骤s116的处理。
[0196]
在步骤s116,更新处理部36基于所确定的物体确定要素的值来更新本次关联时刻rt的航迹数据td中包含的物体确定要素中与确定的物体确定要素对应的物体确定要素。接着,步骤s116的处理转移到步骤s114的处理。
[0197]
如上所述,物体识别装置3中,更新处理部36在无法从车外信息传感器1获取物体的宽度w、长度l、方向θ、上端zh的位置和下端z
l
的位置中的至少一个作为物体确定要素的情况下,基于分别对应于物体的宽度w、长度l、方向θ、上端zh的位置和下端z
l
的位置而预先单独设定的设定值中与无法从车外信息传感器1获取的物体确定要素对应的设定值来确定无法从车外信息传感器1获取的物体确定要素的值。
[0198]
因此,即使无法从车外信息传感器1获取物体的宽度w、长度l、方向θ、上端zh的位置和下端z
l
的位置,也能抑制误差并更新航迹数据td。由此,不会使本车辆与物体的相对位置关系大幅偏离,因而能将本车辆自动驾驶精度的降低抑制到最小限度。
[0199]
此外,如果除了物体的宽度w、长度l、方向θ之外,还校正上端zh的位置以及下端z
l
的位置,则能确定物体是否为静止物体。静止物体例如是标示板。静止物体可以是道路标识。因此,能确定物体的种类。由此,能进一步提高本车辆自动驾驶的精度。
[0200]
实施方式5.在实施方式5中,对于与实施方式1、实施方式2、实施方式3以及实施方式4相同或等同的结构及功能,省略其说明。实施方式5与实施方式1的不同点在于,将多个候补点dph
进行筛选。其他结构与实施方式1、实施方式2、实施方式3以及实施方式4相同。即,其他结构是与实施方式1、实施方式2、实施方式3以及实施方式4相同或等同的结构及功能,对这些部分标注相同的标号。
[0201]
图20是说明实施方式5所涉及的图13的步骤s20中的位置校正处理的另一示例的流程图。在步骤s161,更新处理部36判定候补点dph的数量是否为多个。在更新处理部36判定候补点dph的数量是多个时,步骤s161的处理转移到步骤s162的处理。在更新处理部36判定候补点dph的数量不是多个时,步骤s161的处理转移到步骤s170的处理。
[0202]
在步骤s162,更新处理部36参照航迹数据td的更新日志。接着,步骤s162的处理转移到步骤s163的处理。
[0203]
在步骤s163,更新处理部36判定观测本次关联时刻rt的检测数据dd而得到的车外信息传感器1的种类是否与观测上次关联时刻rt的检测数据dd而得到的车外信息传感器1的种类不同。更新处理部36判定观测本次关联时刻rt的检测数据dd而得到的车外信息传感器1的种类与观测上次关联时刻rt的检测数据dd而得到的车外信息传感器1的种类不同的情况下,步骤s163的处理转移到步骤s164的处理。更新处理部36判定观测本次关联时刻rt的检测数据dd而得到的车外信息传感器1的种类与观测上次关联时刻rt的检测数据dd而得到的车外信息传感器1的种类没有不同的情况下,即观测本次关联时刻rt的检测数据dd而得到的车外信息传感器1的种类与观测上次关联时刻rt的检测数据dd而得到的车外信息传感器1的种类相同的情况下,步骤s163的处理转移到步骤s168的处理。
[0204]
在步骤s164,更新处理部36基于航迹数据td的预测数据td
rtpred
中包含的物体上的中心点的位置p和检测数据dd中包含的检测点dp相对于车外信息传感器1的位置p来决定多个候补点dph的各个准确度。接着,步骤s164的处理转移到步骤s165的处理。
[0205]
在步骤s165,更新处理部36废弃多个候补点dph中准确度最低的候补点dph。接着,步骤s165的处理转移到步骤s166的处理。
[0206]
在步骤s166,更新处理部36采用没有被废弃的候补点dph中准确度最高的候补点dph。接着,步骤s166的处理转移到步骤s167的处理。
[0207]
在步骤s167,更新处理部36基于所采用的候补点dph的位置hp来校正本次关联时刻rt的检测数据dd中包含的检测点dp相对于车外信息传感器1的位置p。接着,步骤s167的处理不转移到其它处理,结束位置校正处理。
[0208]
在步骤s168,更新处理部36计算候补点dph的可靠度dor。接着,步骤s168的处理转移到步骤s169的处理。
[0209]
在步骤s169,更新处理部36基于可靠度dor来采用候补点dph。接着,步骤s169的处理转移到步骤s167的处理。
[0210]
在步骤s170,更新处理部36采用所设定的候补点dph。接着,步骤s170的处理转移到步骤s167的处理。
[0211]
例如,在车外信息传感器1为摄像头的情况下,检测数据dd中包含检测点dp相对于车外信息传感器1的位置p、检测点dp的速度v和物体的宽度w。此外,在车外信息传感器1为摄像头的情况下,候补点dph(2)成为物体上的检测点dp的位置p的候补。由此,根据步骤s161的处理、步骤s170的处理和步骤s167的处理,基于候补点dph(2)的位置hp,校正检测点dp相对于车外信息传感器1的位置p。
[0212]
另一方面,在车外信息传感器1为毫米波雷达的情况下,检测数据dd中包含检测点dp相对于车外信息传感器1的位置p和检测点dp的速度v。此外,在车外信息传感器1为毫米波雷达的情况下,候补点dph(1)和候补点dph(2)分别成为物体上的检测点dp的位置p的候补。
[0213]
这里,由于摄像头的检测数据dd和航迹数据td成立相关关系,在执行步骤s161的处理、步骤s170的处理和步骤s167的处理后,毫米波雷达的检测数据dd和航迹数据td的相关性有时也成立。
[0214]
并且,基于检测点dp相对于车外信息传感器1的位置p和物体上的中心点的位置p,有时判定为候补点dph(1)的准确度高于候补点dph(2)的准确度。在判定为这样的准确度的情况下,根据步骤s164的处理、步骤s165的处理和步骤s166的处理,从物体上的检测点dp的位置p的候补中废弃候补点dph(2),采用候补点dph(1)。
[0215]
根据以上说明,在物体识别装置3中,更新处理部36基于航迹数据td的更新日志,废弃多个候补点dph中的一部分。
[0216]
航迹数据td的更新日志中包含伴随物体的移动而至少物体的中心点的位置p被更新的日志。物体的中心点的位置p被更新的日志与检测到物体的车外信息传感器1相关联。因此,如果参照航迹数据td的更新日志,则经由物体的中心点的位置p被更新的日志,可参照检测点dp相对于车外信息传感器1的位置p被校正时使用的车外信息传感器1的种类。由此,若在检测点dp检测到物体时的车外信息传感器1的种类被确定,则校正检测点dp相对于车外信息传感器1的位置p时所使用的候补点dph能被确定。
[0217]
如上述说明的那样,如果车外信息传感器1由毫米波雷达构成,则考虑最近点和中央点成为候补点dph。此外,如上述说明的那样,如果车外信息传感器1由单目摄像头构成,则考虑中央点成为候补点dph。
[0218]
这里,多个候补点dph的各个准确度是基于物体的中心点的位置p和检测点dp相对于车外信息传感器1的位置p来决定的。物体的中心点的位置p和检测点dp相对于车外信息传感器1的位置p根据物体的航迹而变化。例如,根据物体的中心点的位置p和检测点dp相对于车外信息传感器1的位置p的位置关系,在物体的中心点的位置p和检测点dp相对于车外信息传感器1的位置p之间的欧氏距离小于图6的判定阈值距离d
th1
时,准确度高的候补点dph视为是相比于中央点的最近点。该情况下,废弃候补点dph中的中央点,采用最近点。
[0219]
另外,图6的判定阈值距离d
th1
设定在检测点dp的位置p不被车外信息传感器1的分辨率单元所埋没的范围内。
[0220]
此外,如果是在本车辆前方处于移动中的物体,则中央点是物体的后方中央点。如果是在本车辆后方处于移动中的物体,则中央点是物体的前表面中央点。
[0221]
根据以上说明,更新处理部36基于航迹数据td的更新日志,废弃多个候补点dph中的一部分。由此,能够将准确度高的候补点dph利用于航迹数据td的更新。
[0222]
此外,各个实施方式中,包括用于执行物体识别装置3的处理电路。处理电路可以是专用的硬件,也可以是执行存储在存储器中的程序的cpu(也称为central processing unit:中央处理单元、中央处理装置、处理装置、运算装置、微处理器、微机、处理器、dsp)。
[0223]
图21是说明硬件结构例的图。在图21中,处理电路201与总线202连接。在处理电路201是专用硬件的情况下,处理电路201相当于例如单个电路、复合电路、程序化处理器、
asic、fpga或它们的组合。可以通过处理电路201来分别实现物体识别装置3的各个部分的功能,或者可以通过处理电路201来汇总实现各个部分的功能。
[0224]
图22是说明另一硬件结构例的图。在图22中,处理器203和存储器204连接到总线202。当处理电路是cpu时,通过软件、固件或软件与固件的组合来实现物体识别装置3的各个部分的功能。软件或固件以程序的形式来表述,并存储于存储器204。处理电路读出存储于存储器204的程序并执行,从而实现各部分的功能。即,物体识别装置3具备用于存储下述程序的存储器204,该程序在由处理电路执行时最终执行控制时刻测量部31、数据接收部32、临时设定部33、预测处理部34、相关处理部35以及更新处理部36的步骤。另外,可以说这些程序使计算机执行用于执行时刻测量部31、数据接收部32、临时设定部33、预测处理部34、相关处理部35以及更新处理部36的步骤或方法。这里,存储器204相当于ram、rom、闪存、eprom、eeprom等非易失性或易失性的半导体存储器、或磁盘、软盘、光盘、压缩光盘、迷你光盘、dvd等。
[0225]
另外,物体识别装置3的各个部分的功能的一部分可以通过专用硬件来实现,而另一部分可以通过软件或固件来实现。例如,可以通过作为专用硬件的处理电路来实现临时设定部33的功能。此外,处理电路读出并执行存储在存储器204中的程序,从而能够实现相关处理部35的功能。
[0226]
由此,处理电路可以利用硬件、软件、固件或它们的组合来实现上述各功能。
[0227]
以上,在实施方式1中,对通过snn算法、gnn算法、jpda算法等求出检测数据dd
rt
和航迹数据td
rt
的预测数据td
rtpred
有无相关关系的处理的一个示例进行了说明,但并不特别限定于此。
[0228]
例如,可以根据检测数据dd
rt
中包含的各检测要素与航迹数据td
rt
的预测数据td
rtpred
中包含的各航迹要素的差分是否在预先确定的误差量e的范围内,判定检测数据dd
rt
和航迹数据td
rt
的预测数据td
rtpred
有无相关关系。
[0229]
具体地,相关处理部35导出检测数据dd
rt
中包含的相对于车外信息传感器1的位置p与航迹数据td
rt
的预测数据td
rtpred
中包含的位置p之间的距离差。
[0230]
相关处理部35导出检测数据dd
rt
中包含的速度v与航迹数据td
rt
的预测数据td
rtpred
中包含的速度v之间的速度差。
[0231]
相关处理部35导出检测数据dd
rt
中包含的方位角与航迹数据td
rt
的预测数据td
rtpred
中包含的方位角之间的方位角差。
[0232]
相关处理部35求出距离差、速度差和方位角差各自的平方之和的平方根。当求出的平方根超过误差量e时,相关处理部35判定没有相关关系。当求出的平方根为误差量e以下时,相关处理部35判定有相关关系。也可以通过这样的判定处理,来判定检测数据dd
rt
与航迹数据td
rt
的预测数据td
rtpred
有无相关关系。
[0233]
此外,例如,可以基于检测点dp的速度v来求出检测点dp的对地速度。如果求出检测点dp的对地速度,则在基于检测点dp处的对地速度判定由车外信息传感器1检测到的物体是车辆c
model2
时,检测数据dd的物体确定要素中有时不包含车辆c
model2
的宽度w和长度l。在这种情况下,车辆c
model2
的宽度w设定为2[m],车辆c
model2
的长度l设定为4.5[m]。以这种方式设定的车辆c
model2
的宽度w和长度l也是对应于无法从车外信息传感器1获取的物体确定要素而预先单独设定的设定值。
[0234]
另外,更新处理部36可以基于由车外信息传感器1检测到物体时的检测点dp的速度v来更新航迹数据td。由此,能基于将由车外信息传感器1观测到的观测结果考虑在内的检测点dp的速度v来更新航迹数据td。由此,能准确地掌握本车辆与物体的相对位置关系,因而能进一步提高本车辆自动驾驶的精度。
[0235]
另外,实施方式1中的图16所示的步骤s81至步骤s86的处理,实施方式2中的图17所示的步骤s91至步骤s96的处理,实施方式3中的图18所示的步骤s101至步骤s106的处理和实施方式4中的图19所示的步骤s111至步骤s116的处理分别可以由cpu并行执行。标号说明
[0236]
1车外信息传感器、2车辆信息传感器、3物体识别装置、4通知控制装置、5车辆控制装置、31时刻测量部、32数据接收部、33临时设定部、34预测处理部、35相关处理部、36更新处理部。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。