1.本发明设计一种剪断机构。
背景技术:
2.割草机所使用的割灌机等旋转刃由于在旋转中会使石头等硬物(异物)飞散,因此存在安全隐患。
3.在专利文献1中,公开了一种在割草机中使两枚刃像修剪器的刃一样左右往复从而减少飞散物的刃的技术。现有技术文献专利文献
4.专利文献1:日本实公昭53-003171号公报
技术实现要素:
发明所要解决的问题
5.然而,在专利文献1所公开的技术中,由于利用上下刃进行修剪,因此卡入石头等硬物(异物)会导致刃出现缺口或变形。而且由于是往复运动,所以机器部件的负荷很大。用于解决问题的手段
6.根据本发明的一种方式,提供一种剪断机构。所述剪断机构包括一对刃单元和运动机构。一对刃单元分别包括剪断刃。运动机构保持一对刃单元的相对姿势,并且使一对刃单元中的至少一方沿预定轨道运动以使速度不为0。一对刃单元构成为通过在运动中重叠彼此的剪断刃来切断对象物。
7.根据这样的方式,剪断刃的速度变化小,因此减轻了对机器部件的负荷。此外,不易产生振动噪音。而且由于动能不会为零,因此切断效率很高。
附图说明
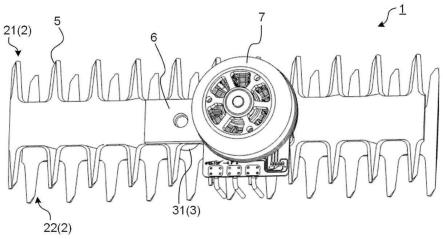
8.图1是表示剪断机构的概略立体图。图2是表示剪断机构1的刃单元2和运动机构3的结构的概略立体图。图3是表示剪断机构1的运动机构3、接合部4、基座6以及电动机7的结构的概略立体图。图4是表示剪断机构1剪断作为切断对象的对象物w的状态的图。图5是表示剪断机构1的刃单元2的各个剪断刃所具有的推出面5的概略图。图6是表示刃单元2切断对象物w的状态的概略图。图7是表示剪断机构1的偏心凸轮31的结构的概略立体图。图8是表示第1剪断刃21相对于第2剪断刃22的圆周运动的概略图。图9是表示使多个偏心凸轮31向相反方向旋转的运动机构3的结构的概略立体图。图10是表示刃单元2在上下移动的同时相对往复运动的状态的概略图。
具体实施方式
9.以下,参照附图说明本发明的实施方式。以下所示实施方式中示出的各种特征事项均能够相互组合。
10.1.整体结构在第1章中,将说明本实施方式相关的剪断机构。图1是表示剪断机构的概略立体图。
11.1.1剪断机构1剪断机构1包括一对刃单元2和运动机构3,并且是通过相对于物体内部任何表面在与表面平行的方向上施加力来切断物体的机构。如图1所示,剪断机构1包括一对刃单元2、运动机构3、接合部4、推出面5、基座6以及电动机7。图2是表示剪断机构1的刃单元2和运动机构3的结构的概略立体图。图3是表示剪断机构1的运动机构3、接合部4、基座6以及电动机7的结构的概略立体图。
12.1.2刃单元2一对刃单元2分别包括剪断刃,具体而言,包括第1剪断刃21和第2剪断刃22。第1剪断刃21和第2剪断刃22呈梳齿状且具有至少一个以上的凹部。第1剪断刃21以及第2剪断刃22构成为被重合进行表面接触,并且保持这种状态而相互滑动。图4是表示剪断机构1剪断作为切断对象的对象物w的状态的图。如图4所示,通过第1剪断刃21和第2剪断刃22滑动,夹在第1剪断刃21的凹部21a和第2剪断刃22的凹部22a之间的对象物w在平行方向上受到剪断力而被切断。具体而言,具有第1剪断刃21的刃部21b和具有第2剪断刃22的刃部22b通过向对象物w的轴向水平地施加剪断力,从而切断对象物w。因此,成为了减小刃部21b和刃部22b的前端部分的面积并提升每单位面积的压力从而提高剪断力的结构。即,刃部21b和刃部22b的切断面具有锋利的刃形状。刃部21b和刃部22b具有的刃角度或截面形状由包括剪断机构1的机器或对象物w来决定,因此不受限制。
13.第1剪断刃21和第2剪断刃22分别呈梳齿状,在梳齿的两侧具有刃部21b和刃部22b。这是由于第1剪断刃21和第2剪断刃22相互进行圆周运动而滑动,为了提高切断效率而成为此结构。因此,优选采用这样的结构。
14.在图1、图2以及图3中,第1剪断刃21和第2剪断刃22虽然在长度方向的两侧具有作为切断面的刃部21b和刃部22b,但也可仅在单侧具有切断面。此外,第1剪断刃21和第2剪断刃22的材质可以是不锈钢、碳素钢、合金钢、工具钢、粉末冶金钢、复合钢、钛合金等金属,也可以是碳纤维、塑料。只要是能够切断对象物w即可,材质不受限制。第1剪切刃21和第2剪切刃22分别具有凹部21a和凹部22a,虽然呈梳齿状,但梳齿的数量、凹部的深度和宽度等规格不受限制。另外,第1剪切刃21和第2剪切刃22的厚度也不受限制。
15.1.3运动机构3运动机构3保持一对刃单元2的相对姿势,并且使一对刃单元2中的至少一方沿预定轨道运动以使速度不为0。通过在剪断机构1中具有这样的运动机构3,一对刃单元2构成为通过在运动中重叠彼此的剪断刃即第1剪断刃21和第2剪断刃22来切断对象物w。在此优选的是,预定轨道是圆轨道,运动是圆周运动。另外优选的是,运动机构3使一对刃单元2分别沿着各自的预定轨道运动以使双方速度不为0。
16.运动机构3保持刃单元2的作为彼此的剪断刃的第1剪断刃21和第2剪断刃22的相
对姿势使相对速度不为0,由此减轻对构成剪断机构1的机器部件的负荷。此外,可以抑制振动噪音的产生。不仅如此,由于动能不为零,因此运动机构3能够提高切断效率。
17.优选地,运动机构3经由接合部4与一对刃单元2接合,接合部4的一方以接合部4的另一方为中心相对地进行圆周运动。换句话说,运动机构3通过使第1剪断刃21和第2剪断刃22的旋转轴以接合部4为中心相互偏心来生成相对的圆周运动。作为用于这种目的的机构,运动机构3包括后述的多个偏心凸轮31。作为一个示例,偏心凸轮31可以是平行曲柄机构(未图示)。此外,运动机构3还可以分别独立地控制第1剪断刃21和第2剪断刃22使其动作,进行相对的圆周运动。在以下的实施例中,运动机构3将被作为偏心凸轮31进行说明。
18.当运动机构3是偏心凸轮31时,如图2所示,运动机构3包括两个偏心凸轮31。每个偏心凸轮31相对于旋转轴包括两个偏心轴。两个偏心轴中的一方经由接合部41与第1剪断刃21接合,另一方经由接合部42与第2剪断刃22接合。此外,两个偏心凸轮31中一方的旋转轴与后述的电动机7接合。即,与电动机7接合的偏心凸轮31是主动轴,另一偏心凸轮31是随其旋转的从动轴。通过这样的运动机构3来实现所述预定轨道。
19.1.4接合部4第1剪断刃21和第2剪断刃22具有多个作为接合部4的贯通孔。作为接合部4的贯通孔的位置不受限制,只要是在第1剪断刃21和第2剪断刃22的内部即可。经由这样的贯通孔,第1剪断刃21经由接合部41与偏心凸轮31接合,第2剪断刃22经由接合部42与偏心凸轮31接合。如图2所示,由于有两个偏心凸轮31,被接合的一对刃单元2的第1剪断刃21和第2剪断刃22在相互接触的同时进行约束运动。因此,两个剪断刃可以彼此保持相对姿势。
20.1.5推出面5图5是表示剪断机构1的刃单元2的各个剪断刃所具有的推出面5的概略图。剪断机构1可例如搭载于切断草坪或植被的割草机上。因此,由于是在室外进行的切断作业,在切断过程中石头、金属片等异物a可能会进入剪断刃的凹部21a和凹部22a之间。由此,异物a会对第1剪断刃21以及第2剪断刃22造成损伤。为了尽可能地防止异物a像这样进入凹部21a和凹部22a,刃单元2的至少一方的剪断刃在剪断刃的前端具备推出面5。即,可以是第1剪断刃21具备推出面51,第2剪断刃22具备推出面52,也可以是仅一方具备推出面5。为了尽可能地防止异物a像这样进入凹部21a和凹部22a,在剪断刃的前端部分设有预定角度,使得异物a在第1剪断刃21和第2剪断刃22的前端被推出。因此,推出面5构成为能够在剪断刃不重叠的状态下推出异物a。关于推出面5将在下一章详细说明。
21.1.6基座6如图3所示,基座6安装于偏心凸轮31的上表面,具有多个贯通孔以便偏心凸轮31能够自由旋转,并与偏心凸轮31接合。多个贯通孔中的一个构成为使偏心凸轮31的旋转轴与后述的电动机7的旋转轴接合。
22.图6是表示刃单元2切断对象物w的状态的概略图。在剪断机构1中,作为刃单元2的相互剪断刃的第1剪断刃21和第2剪断刃22在彼此保持相对姿势的同时进行圆周运动。因此,在草坪或植被的切断过程中,剪断机构1在水平方向上受到来自根植于地面的草坪或植被的阻力p。通过受到这样的阻力p,第1剪断刃21和第2剪断刃22无法彼此保持相对姿势。因此,需要经由基座6来固定接合第1剪断刃21和第2剪断刃22的多个接合部4。通过具有基座
6,剪断机构1能够平衡作为来自草坪或植被的外力的阻力p与基座6的反作用力r,从而使得第1剪断刃21和第2剪断刃22能够彼此保持相对姿势。
23.1.7电动机7电动机7构成为驱动运动机构3。优选地,第1剪断刃21或第2剪断刃22接合的偏心凸轮31的旋转轴构成为直接接受电动机7的动力。即,剪断机构1由直接驱动电动机来驱动。通过不使用减速机构而采用直接驱动,可以减轻减速机等的磨损所导致的损耗,从而提高切断效率。.此外,由于不与减速机等接触,引起振动的部件较少,因此能够减轻剪断机构1的机器噪音。不仅如此,由于没有减速机等,因此有助于实现具备剪断机构1的机器的小型化。
24.2.对象物w以及异物a在第2章中,将对剪断机构1切断的对象物w和避免切断的异物a进行说明。剪断机构1可例如搭载于切断草坪或植被的割草机上。割草机切断的对象物w是以草坪、杂草、木片等存在于草地上的物体为对象。此外,根据搭载剪断机构1的机器,对象物w也可以是纸或毛发。对象物w的材质不受限制,只要是刃单元2具备的剪断刃能够切断的材质即可。
25.当剪断机构1搭载于割草机时,异物a是小石子或金属片。这样的异物a也存在于需要割草的地方,如公园或高尔夫球场。如果剪断机构1是像修剪器一样剪断刃在一个方向上往复运动的机构的话,由于剪断刃仅从一个方向受到来自异物a的作用力,因此对剪断刃造成的负荷较大。这样一来,剪断刃便容易损坏。剪断机构1的推出面5被设计为这样推出异物并尽可能不切断的结构。因此,剪断机构1积极地切断作为对象物w的草坪或植被,并积极地避免切断作为异物a的石子或金属片。特别是当割草机是机器人式的自走式机器时,这样的机构尤其可取,因为人无法检测到异物a并控制剪断刃的驱动。
26.3.剪断机构1的功能在第3章中,将对在第1章以及第2章说明了的剪断机构1、切断对象的对象物w以及避免切断的异物a有关的各项功能分别进行说明。
27.3.1关于剪断机构1的旋转运动图7是表示剪断机构1的偏心凸轮31的结构的概略立体图。剪断机构1包括的运动机构3使作为一对刃单元2的第1剪断刃21和第2剪断刃22沿预定轨道运动。预定轨道是圆轨道,运动是圆周运动。优选地,运动机构3是偏心凸轮31。偏心凸轮31包括两个不同的旋转轴,一对刃单元2的一方与旋转轴中的一方接合,一对刃单元2的另一方与旋转轴中的另一方接合。具体来说,如图7所示,偏心凸轮31包括控制剪断机构1的动作的运动旋转轴as、与第1剪断刃21的贯通孔(接合部41)接合的第1旋转轴a1、以及与第2剪断刃22的贯通孔(接合部42)接合的第2旋转轴a2。
28.从运动旋转轴as到第1旋转轴a1的距离是第1偏心半径r1,从运动旋转轴as到第2旋转轴a2的距离是第2偏心半径r2。当运动旋转轴as通过电动机7等来旋转时,第1旋转轴a1和第2旋转轴a2也以运动旋转轴as为中心进行旋转。通过这样的旋转运动,第1旋转轴a1和第2旋转轴a2在彼此的坐标系中进行旋转运动。在图7中,第1剪断刃21具有的第1旋转轴a1的轨道表示在第2旋转轴a2的坐标系中。这样一来,通过运动旋转轴as旋转,第1旋转轴a1以第1偏心半径r1与第2偏心半径r2相加的半径旋转。通过这样的机构,能够轻易实现圆周运动。此外,通过采用通用的偏心凸轮31,能够轻易且低价地实现圆周运动。
29.运动旋转轴as由于与电动机7的轴接合,因此被传递电动机7的旋转运动而旋转。只要电动机7匀速旋转,构成一对刃单元2的第1剪断刃21和第2剪断刃22的圆周运动就是匀速圆周运动。由于剪断刃这样匀速移动,所以与修剪器那样的往复运动相比不会产生速度0的问题。因此,可以有效地将旋转运动转换为切断运动。
30.图8是表示第1剪断刃21相对于第2剪断刃22的圆周运动的概略图。图8所示的圆周运动构成为通过一对刃单元2在运动中周期性地重叠彼此的剪断刃来切断对象物w。和修剪器那样从一个方向施加作用力进行切断的方法相比,这种第2剪断刃22相对于第1剪断刃21做圆周运动的同时进行切断的方法能够在低负荷下切断对象物w。即,由于切断对象物w的部位不是剪断刃的点而是剪断刃的线,因此可以实现这样低负荷的切断。例如在烹饪中,与刀从上至下施加作用力来切材料相比,将刀横向移动并从上至下施加作用力来切材料的方法负荷更小。即,每单位时间与剪断刃接触时对象物w的面积增大,因此能够更加有效地进行切断。
31.如图8所示,由于第1剪断刃21相对于第2剪断刃22进行圆周运动,两个剪断刃周期性地接触对象物w来进行切断。因此,由于不会持续对接触对象物w的剪断刃的一个点上造成负荷,因此剪断刃的负荷较小。由此,可以减少滑动音的产生。由于这样的切断方法在垂直方向和水平方向上向对象物w施加作用力,因此用户可以通过控制决定切断速度的电动机7的旋转速度来根据对象物w改变切断效率。此外,剪断刃的对象物w的切割量由第1剪断刃21和第2剪断刃22的圆周运动的半径来决定。因此,用户可以通过改变第1偏心半径r1和第2偏心半径r2来自由地改变切割量。
32.在此,旋转轴虽然是决定第1偏心半径r1和第2偏心半径r2的第1旋转轴a1和第2旋转轴a2,但任何一方的旋转轴都可以与运动旋转轴as同轴。此外,通过将第1偏心半径r1和第2偏心半径r2的比率设定为1,从运动旋转轴as到第1旋转轴a1的距离与从运动旋转轴as到第2旋转轴a2的距离相等,力矩也相等。这样一来,当半径的比率为1时,构成剪断机构1的部件的负荷较小,因此优选。然而,由于重心的位置会根据第1剪断刃21和第2剪断刃22的形状、材质而变化,因此也可以改变第1偏心半径r1和第2偏心半径r2的比率。
33.在此,(第1偏心半径r1/第2偏心半径r2)或(第2偏心半径r2/第1偏心半径r1)的值在0以上1以下。具体而言,(第1偏心半径r1/第2偏心半径r2)或(第2偏心半径r2/第1偏心半径r1)的值是0、0.01、0.02、0.03、0.04、0.05、0.06、0.07、0.08、0.09、0.1、0.11、0.12、0.13、0.14、0.15、0.16、0.17、0.18、0.19、0.2、0.21、0.22、0.23、0.24、0.25、0.26、0.27、0.28,0.29、0.3、0.31、0.32、0.33、0.34、0.35、0.36、0.37、0.38、0.39、0.4、0.41、0.42、0.43、0.44、0.45、0.46、0.47、0.48、0.49、0.5、0.51、0.52、0.53、0.54、0.55、0.56、0.57、0.58、0.59、0.6、0.61、0.62、0.63、0.64、0.65、0.66、0.67、0.68、0.69、0.7、0.71、0.72、0.73、0.74、0.75、0.76、0.77、0.78、0.79、0.8、0.81、0.82、0.83、0.84、0.85、0.86、0.87、0.88,0.89、0.9、0.91、0.92、0.93、0.94、0.95、0.96、0.97、0.98、0.99、1,也可以是在此所示任意两个数值之间的范围内。
34.3.2关于推出面5的推出机构如上所述,构成刃单元2的第1剪断刃21或第2剪断刃22的至少一方的剪断刃在剪断刃的前端具备推出面5。推出面5构成为能够在运动中推出与推出面5接触的异物a。即,推出面5的功能是在切断对象物w时防止异物a进入刃单元2的剪断刃的凹部21a或凹部22a。通
过这个功能,第1剪断刃21和第2剪断刃22可以防止石头或金属片等坚硬的异物a卡入。因此,能够减轻剪断刃的损伤,进而减轻对构成剪断机构1的部件的负荷。
35.推出面5构成为能够在作为剪断刃的第1剪断刃21和第2剪断刃22不重叠的状态下推出异物a。在此,虽然对第1剪断刃21的推出面5进行了说明,但第2剪断刃22也具有相同的形状。如图5所示,如果相对于第1剪断刃21的凹部下端部21c的剪断刃角度θ1和第1剪断刃21接近直角,则异物a很容易从外部进入凹部21a。因此,第1剪断刃21从第1剪断刃的前端部21e切入至推出下部21d,在第1剪断刃21的前端设置推出角度θ2。所述推出角度θ2被设定为小于剪断刃角度θ1,且异物a在第1剪断刃21和第2剪断刃22不重叠的状态下被向外推出。
36.由于剪断机构1包括这样的推出面5,只要是在剪断刃不重叠的状态下,就能够特别减轻对剪断刃的负荷。即使是在剪断刃重叠的状态下,推出面5也可以通过与异物a接触来保护第1剪断刃21和第2剪断刃22的切断面。
37.推出角度θ2优选为小于剪断刃角度θ1,并且在90
°
以内。即,相对于第1剪断刃21的旋转方向来设定推出异物a的角度。因此,(推出角度θ2/剪断刃角度θ1)的值大于0小于1。具体而言,(推出角度θ2/剪断刃角度θ1)的值是0.01、0.02、0.03、0.04、0.05、0.06、0.07、0.08、0.09、0.1、0.11、0.12、0.13、0.14、0.15、0.16、0.17、0.18、0.19、0.2、0.21、0.22、0.23、0.24、0.25、0.26、0.27、0.28、0.29、0.3、0.31、0.32、0.33、0.34、0.35、0.36、0.37、0.38、0.39、0.4、0.41、0.42、0.43、0.44、0.45、0.46、0.47、0.48、0.49、0.5、0.51、0.52、0.53、0.54、0.55、0.56、0.57、0.58、0.59、0.6、0.61、0.62、0.63、0.64、0.65、0.66、0.67、0.68、0.69,0.7、0.71、0.72、0.73、0.74、0.75、0.76、0.77、0.78、0.79、0.8、0.81、0.82、0.83、0.84、0.85、0.86、0.87、0.88、0.89、0.9、0.91、0.92、0.93、0.94、0.95、0.96、0.97、0.98、0.99,也可以是在此所示任意两个数值之间的范围内。
38.从凹部下端部21c到推出下部21d的距离和从凹部下端部21c到前端部21e的距离基于考虑使用剪断机构1时异物a的形状、大小等特征,以及第1剪断刃21和第2剪断刃22的形状、凹部21a的宽度等的设计值来决定。因此,(从凹部下端部21c到推出下部21d的距离/从凹部下端部21c到前端部21e的距离)大于0小于1。具体而言,(从凹部下端部21c到推出下部21d的距离/从凹部下端部21c到前端部21e的距离)的值是0.01、0.02、0.03、0.04、0.05、0.06、0.07、0.08、0.09、0.1、0.11、0.12、0.13、0.14、0.15、0.16、0.17、0.18、0.19、0.2、0.21、0.22、0.23、0.24、0.25、0.26、0.27、0.28、0.29、0.3、0.31、0.32、0.33、0.34、0.35、0.36、0.37、0.38,0.39、0.4、0.41、0.42,0.43、0.44、0.45、0.46、0.47,0.48、0.49、0.5、0.51、0.52、0.53、0.54、0.55、0.56、0.57、0.58、0.59、0.6、0.61、0.62、0.63、0.64、0.65、0.66、0.67、0.68、0.69、0.7、0.71、0.72、0.73、0.74、0.75、0.76、0.77、0.78、0.79、0.8、0.81、0.82、0.83、0.84、0.85、0.86、0.87、0.88、0.89、0.9、0.91、0.92、0.93、0.94、0.95、0.96、0.97、0.98、0.99,也可以是在此所示任意两个数值之间的范围内。
39.4.其他也可以通过以下各种方式来实施上述的实施方式。(1)剪断机构1包括的运动机构3也可以包括平行曲柄机构,一对刃单元2的一方与平行曲柄机构的固定节的两端接合,一对刃单元2的另一方与平行曲柄机构的中间节的两端接合。通过将固定节作为第1剪断刃21,将中间节作为第2剪断刃22,可以简化剪断机构1的结构。此外,可以安装电动机7使平行曲柄机构的主动节旋转。
(2)接合部4也可以包括滚动轴承。偏心凸轮31的运动旋转轴as、第1旋转轴a1以及第2旋转轴a2更顺畅地进行匀速圆周运动,从而可以减轻第1剪断刃21以及第2剪断刃22的切断负荷。(3)第1剪断刃21或第2剪断刃22的刃也可以像锯刃一样设置凹凸。通过增大切断面积,可以更加有效地切断对象物w。(4)图9是表示使多个偏心凸轮31彼此向相反方向旋转的运动机构3的结构的概略立体图。偏心凸轮31在侧面具备齿轮31a,通过使多个偏心凸轮31彼此向相反方向旋转,在保持一对刃单元2的相对姿势的同时进行圆周运动,并相对于刃单元2的长度方向使双方进行往复运动。图10是表示刃单元2在上下移动的同时相对往复运动的状态的概略图。由于具有这样的运动机构3,剪断机构1具有剪断刃速度不会为0的有用性。不仅如此,由于第1剪断刃21的凹部21a和第2剪断刃22的凹部22a的高度即刃部21b、刃部22b的长度可以在整体上切割草坪或植被,因此和偏心凸轮31在同一方向上旋转的情况相比,能够缩短刃长(刃部的长度),使刃单元2轻量化。另外,由于是在第1剪断刃21和第2剪断刃22的长度方向的中心一致的状态下移动,因此可以配合第1剪断刃21以及第2剪断刃22的间距来改变偏心凸轮31的偏心量(在图10中是第1剪断刃21的左右方向的移动量),可以应对刃的间距不同的各种剪断刃。
40.此外,本发明还可以通过以下各种方式来提供。在所述剪断机构中,所述预定轨道是圆轨道,所述运动是圆周运动。在所述剪断机构中,所述运动机构经由接合部与所述一对刃单元接合,所述接合部的一方以所述接合部的另一方为中心相对地进行所述圆周运动。在所述剪断机构中,所述圆周运动是匀速圆周运动,所述一对刃单元构成为通过在所述运动中周期性地重叠彼此的剪断刃来切断所述对象物。在所述剪断机构中,所述运动机构包括多个偏心凸轮,所述偏心凸轮包括两个不同的旋转轴,所述一对刃单元的一方与所述旋转轴中的一方接合,所述一对刃单元的另一方与所述旋转轴中的另一方接合。在所述剪断机构中,所述旋转轴构成为直接接受电动机的动力。在所述剪断机构中,所述刃单元的至少一方相关的所述剪断刃在所述剪断刃的前端包括推出面,所述推出面构成为能够在所述运动中推出与所述推出面接触的异物。在所述剪断机构中,所述推出面构成为能够在所述剪断刃不重叠的状态下推出所述异物。当然,并不仅限于此。
41.最后,虽已对本发明所涉及的种种实施方式进行了说明,但这些实施方式仅作为示例提出,并不用以限制本发明的范围。本发明还可通过其他各种实施方式来实现,凡是在本发明的精神和原则内所作的任何省略、修改、等同替换、改进等,均应包含在本发明的保护范围的内。相关实施例或变形例不仅应包含在本发明的范围或主旨中,还应包含在权利要求范围所记载的发明及其均等范围之内。符号简单说明
42.1:剪断机构2:刃单元
21:第1剪断刃21a:凹部21b:刃部21c:凹部下端部21d:推出下部21e:前端部22:第2剪断刃22a:凹部22b:刃部3:运动机构31:偏心凸轮31a:齿轮4:接合部41:接合部42:接合部5:推出面51:推出面52:推出面6:基座7:电动机a:异物a1:第1旋转轴a2:第2旋转轴as:运动旋转轴p:阻力r:反作用力r1:第1偏心半径r2:第2偏心半径w:对象物θ1:剪断刃角度θ2:推出角度
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
