1.本公开涉及用于在包含规定部分的作业机械中校准使用于根据作业机械中的基准位置计算规定部分的位置的参数的方法以及系统。
背景技术:
2.以往,已知有根据作业机械的规定部分的位置计算其他部分的位置的技术。例如专利文献1所公开的液压挖掘机的位置检测装置使用gps检测主体中的gps天线的位置。位置检测装置根据gps天线的位置,使用规定的参数,计算铲斗的铲尖的位置。规定的参数例如包含gps天线与大臂销的位置关系、大臂、小臂及铲斗各自的长度,大臂、小臂及铲斗各自的角度等。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2012-202061号公报
技术实现要素:
6.发明将要解决的课题
7.运算出的铲斗的铲尖的位置精度受到上述参数的精度的影响。但是,这些参数通常相对于设计值具有误差。因此,上述的专利文献1公开了自动地进行参数的校准的校准系统。该校准系统通过将由位置检测装置计算出的作业点的位置与由外部的测量装置测量的作业点的位置比较,自动地进行参数的校准。由此,能够提高位置检测的精度。但是,要求进一步提高位置检测的精度。
8.本公开的目的在于提高作业机械中的位置检测的精度。
9.用于解决课题的手段
10.本公开的一方式的方法为了校准用于作业机械的参数而由计算机执行。作业机械包含规定部分。参数用于根据作业机械中的基准位置计算规定部分的位置。该方法具备以下的处理。第一处理为,取得规定部分的位置的真值。第二处理为,取得基准位置。第三处理为,决定参数的多个校正候选值,该多个校正候选值用于使根据基准位置基于参数计算出的规定部分的位置的计算值与真值一致。第四处理为,对于多个校正候选值的每一个,计算表示真值与计算值之间之差的评价值。第五处理为,基于评价值,从多个校正候选值中决定参数的确定校正值。另外,各处理的执行顺序并不局限于上述的顺序,也可以被变更。
11.本公开的其他方式的系统具备作业机械、位置传感器以及计算机。作业机械包含规定部分。位置传感器检测作业机械中的基准位置。计算机校准用于根据基准位置计算规定部分的位置的参数。计算机取得规定部分的位置的真值。计算机取得位置传感器检测出的基准位置。计算机决定参数的多个校正候选值,该多个校正候选值用于使根据基准位置基于参数计算出的规定部分的位置的计算值与真值一致。计算机对于多个校正候选值的每一个,计算表示真值与计算值之间之差的评价值。计算机基于评价值,从多个校正候选值中
决定参数的确定校正值。
12.发明效果
13.根据本公开,对于用于使作业机械的规定部分的位置的计算值与真值一致的参数的多个校正候选值计算评价值。然后,根据评价值决定参数的确定校正值。因此,参数的校准的精度提高。由此,位置检测的精度提高。
附图说明
14.图1是作业机械的侧视图。
15.图2是表示作业机械及其控制系统的构成的框图。
16.图3是表示用于根据基准位置计算规定部分的位置的参数的图。
17.图4是表示引导图像的一个例子的图。
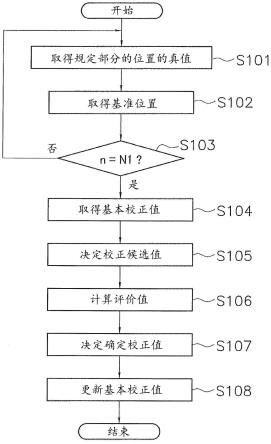
18.图5是表示校准参数的处理的流程图。
19.图6是表示校准时的作业的一个例子的图。
20.图7是表示其他实施方式的控制系统的构成的框图。
21.图8是表示校准时的作业的其他例的图。
具体实施方式
22.以下,一边参照附图一边对实施方式的作业机械1的控制系统进行说明。图1是作业机械1的侧视图。在本实施方式中,作业机械1是挖掘机。
23.如图1所示,作业机械1包含主体2与工作装置3。工作装置3安装于主体2的前部。主体2包含回转体4、行驶体5以及驾驶室6。回转体4相对于行驶体5可回转地安装。驾驶室6配置于回转体4。行驶体5包含履带7。另外,在图1中,仅图示了左右的履带7中的一方。通过驱动履带7,使得作业机械1行驶。
24.工作装置3包含大臂11、小臂12以及铲斗13。大臂11相对于回转体4能够绕大臂销28旋转地安装。小臂12相对于大臂11能够绕小臂销29旋转地安装。铲斗13相对于小臂12能够绕铲斗销30旋转地安装。
25.工作装置3包含大臂缸14、小臂缸15以及铲斗缸16。大臂缸14、小臂缸15以及铲斗缸16例如是液压缸。大臂缸14、小臂缸15以及铲斗缸16通过来自后述的液压泵22的工作油而驱动。大臂缸14使大臂11动作。小臂缸15使小臂12动作。铲斗缸16使铲斗13动作。
26.图2是表示作业机械1及其控制系统的构成的框图。如图2所示,作业机械1包含发动机21、液压泵22、动力传递装置23以及计算机24。发动机21通过来自计算机24的指令信号而控制。液压泵22由发动机21驱动,排出工作油。从液压泵22排出的工作油向大臂缸14、小臂缸15以及铲斗缸16供给。
27.作业机械1包含回转马达25。回转马达25例如是液压马达。或者,回转马达25也可以是电动马达。回转马达25通过来自液压泵22的工作油驱动。回转马达25使回转体4回转。另外,在图2中,图示了一个液压泵,但也可以设有多个液压泵。
28.液压泵22是可变容量泵。在液压泵22连接有泵控制装置26。泵控制装置26控制液压泵22的偏转角。泵控制装置26例如包含电磁阀,通过来自计算机24的指令信号来控制。计算机24通过控制泵控制装置26来控制液压泵22的容量。
29.作业机械1包含控制阀27。液压泵22、缸体14-16以及回转马达25经由控制阀27利用液压回路连接。控制阀27通过来自计算机24的指令信号控制。控制阀27控制从液压泵22向缸体14-16以及回转马达25供给的工作油的流量。计算机24通过控制控制阀27来控制工作装置3的动作。计算机24通过控制控制阀27来控制回转体4的回转。
30.动力传递装置23将发动机21的驱动力传递到行驶体5。履带7由来自动力传递装置23的驱动力驱动而使作业机械1行驶。动力传递装置23例如也可以是变矩器、或者具有多个变速齿轮的变速器。或者,动力传递装置23也可以hst(hydro static transmission)或者hmt(hydraulic mechanical transmission)等其他形式的变速器。
31.计算机24包含cpu等处理器31。处理器31进行用于作业机械1的控制的处理。计算机24包含存储装置32。存储装置32包含ram或者rom等存储器以及hdd(hard disk drive)或者ssd(solid state drive)等辅助存储装置。存储装置32存储有用于作业机械1的控制的数据以及程序。
32.控制系统包含操作装置33。操作装置33能够由操作人员操作。操作装置33例如包含杆、踏板、或者开关。操作装置33向计算机输出与操作人员的操作相应的操作信号。计算机根据操作人员对操作装置33的操作控制控制阀,以使工作装置3动作。计算机根据操作人员对操作装置33的操作控制控制阀27,以使回转体4回转。计算机24根据操作人员对操作装置33的操作控制发动机21以及动力传递装置23,以使作业机械1行驶。
33.控制系统包含输入装置34与显示器35。输入装置34能够由操作人员操作。输入装置34例如是触摸屏。但是,输入装置34也可以包含硬件键。操作人员通过操作输入装置34,输入与作业机械1相关的各种设定。输入装置34输出与操作人员的操作相应的输入信号。显示器35例如是lcd、oeld、或者其他种类的显示器。显示器35显示与来自计算机24的显示信号相应的画面。
34.控制系统包含位置传感器36、姿态传感器37以及工作装置传感器38。位置传感器36检测主体2的位置。主体2的位置由作业机械1的外部的坐标系表示。外部的坐标系例如是基于gnss(global navigation satellite system)的全局坐标系。或者,外部的坐标系也可以是使用作业机械1的作业现场内的局部坐标系。如图3所示,位置传感器36包含天线41与接收器42。天线41安装于主体2。接收器42检测外部的坐标系中的天线41的位置。接收器42输出表示外部的坐标系中的天线41的位置的外部坐标数据。
35.姿态传感器37检测主体2的姿态。主体2的姿态包含主体2的方位与主体2的俯仰角θ1。主体2的方位的意思是主体2的外部的坐标系中主体2所朝向的方向。如图3所示,主体2的俯仰角θ1是主体2的前后方向相对于水平方向的倾斜角度。姿态传感器37例如是imu(inertial measurement unit)。姿态传感器37输出表示主体2的姿态的第一姿态数据。
36.工作装置传感器38检测工作装置3的姿态。工作装置3的姿态包含大臂角θ2、小臂角θ3、铲斗角θ4。工作装置传感器38输出表示大臂角θ2、小臂角θ3、铲斗角θ4的第二姿态数据。大臂角θ2是大臂11相对于主体2的上下方向的角度。小臂角θ3是小臂12相对于大臂11的角度。铲斗角θ4是铲斗13相对于小臂12的角度。详细地说,工作装置传感器38包含图3所示的大臂角传感器38a、小臂角传感器38b以及铲斗角传感器38c。大臂角传感器38a检测大臂角θ2。小臂角传感器38b检测小臂角θ3。铲斗角传感器38c检测铲斗角θ4。
37.详细地说,大臂角传感器38a检测大臂缸14的行程长度。小臂角传感器38b检测小
臂缸15的行程长度。铲斗角传感器38c检测铲斗缸16的行程长度。根据各缸体14-16的行程长度计算大臂11、小臂12与铲斗13的各旋转角度。或者,大臂角传感器38a、小臂角传感器38b以及铲斗角传感器38c也可以分别是直接检测大臂11、小臂12以及铲斗13的旋转角度的传感器。
38.计算机24从操作装置33接收操作信号。计算机24从输入装置34接收输入信号。计算机24向显示器35输出显示信号。计算机24从位置传感器36接收外部坐标数据。计算机24从姿态传感器37接收第一姿态数据。计算机24从工作装置传感器38接收第二姿态数据。
39.计算机24基于接收到的数据,根据主体2的基准位置p1计算工作装置3的规定部分的位置。在本实施方式中,基准位置p1是天线41的位置。规定部分p2是铲斗13的铲尖。
40.存储装置32存储有第一尺寸数据与第二尺寸数据。第一尺寸数据表示天线41相对于主体2中的大臂销28的相对位置。如图3所示,第一尺寸数据包含主体2的前后方向上的基准位置p1(天线41)与大臂销28之间的距离d1和主体2的上下方向上的基准位置p1(天线41)与大臂销28之间的距离d2。
41.第二尺寸数据包含大臂11的长度l1、小臂12的长度l2以及铲斗13的长度l3。详细地说,大臂11的长度l1是大臂销28与小臂销29之间的距离。小臂12的长度l2是小臂销29与铲斗销30之间的距离。铲斗13的长度是铲斗销30与规定部分p2(铲斗113的铲尖)之间的距离。
42.计算机24基于第一位置数据与第二位置数据,根据基准位置p1计算外部的坐标系中的规定部分p2的位置。第一位置数据表示主体2中的基准位置p1。第一位置数据包含上述的第一尺寸数据与第一姿态数据。第二位置数据表示工作装置3中的规定部分p2的位置。第二位置数据包含上述的第二尺寸数据与第二姿态数据。
43.例如计算机24基于第一位置数据与第二位置数据,计算主体2的坐标系中的基准位置p1与规定部分p2的位置关系。然后,计算机24根据主体2的坐标系中的基准位置p1与规定部分p2的位置关系和外部的坐标系中的基准位置p1,将主体2的坐标系中的规定部分p2的位置换算为外部的坐标系中的规定部分p2的位置。
44.如以上那样,计算机24根据位置传感器36检测出的基准位置p1计算规定部分p2的位置。如图4所示,计算机24将表示计算出的规定部分p2的位置的引导图像50显示于显示器35。例如引导图像50包含表示当前的地形51与作业机械1的规定部分p2的显示。存储装置32保存有表示当前的地形51的外部的坐标系中的位置的现状地形数据。计算机24计算外部的坐标系中的当前的地形51与规定部分p2的位置关系,生成表示引导图像50的显示信号。
45.引导图像50也可以包含表示目标地形52与作业机械1的规定部分p2的显示。存储装置32也可以保存表示目标地形52的外部的坐标系中的位置的目标地形数据。计算机24也可以计算当前的地形51与规定部分p2之间的距离。引导图像50也可以包含表示该距离的显示53。表示距离的显示53也可以是目标地形52与规定部分p2之间的距离。
46.接下来,说明对用于计算规定部分p2的位置的参数进行校准的处理。图5是表示校准参数的处理的流程图。成为校准的对象的参数是上述的第一位置数据以及第二位置数据、或者它们的一部分。
47.在步骤s101中,计算机24取得规定部分的位置的真值。如图6所示,操作人员操作作业机械1而将规定部分p2置于位置c1。规定部分的位置c1的外部的坐标系中的位置被预
先测量而保存于存储装置32。或者,规定部分的位置c1的外部的坐标系中的位置也可以由操作人员输入。
48.在步骤s102中,计算机24在规定部分p2被置于位置c1的状态下,取得基准位置p1。计算机24通过来自位置传感器36的外部坐标数据,取得基准位置p1的外部的坐标系中的位置。
49.在步骤s103中,计算机24判定规定部分的位置的真值与基准位置p1的取得的重复数n是否达到阈值n1。例如如图6所示,计算机24在相互不同的多个规定部分的位置c1-c3取得真值与基准位置p1。另外,在图6所示的例子中,多个规定部分的位置c1-c3包含第一位置c1、第二位置c2以及第三位置c3。因而,多个规定部分的位置c1-c3的数量、即阈值n1是3。但是,多个规定部分的位置c1-c3的数量可以比3少,或者也可以比3多。重复数n达到阈值n1时,处理进入步骤s104。
50.在步骤s104中,计算机24取得参数的基本校正值。计算机24如以下的式(1)所示,使用在步骤s102中取得的基准位置p1、在步骤s104中取得的参数的校正值以及上述的参数,计算第一~第三位置c1-c3的计算值a1-a3。
[0051][0052]
q1-q3是第一~第三位置的真值。a1-a3是第一~第三位置的计算值。x是上述的多个参数中的一个值。δx0是参数的基本校正值。计算机24对于上述的多个参数的全部或者一部分的各个计算第一~第三位置c1-c3的计算值a1-a3,以使规定部分的位置c1-c3的计算值a1-a3与真值q1-q3一致。
[0053]
另外,在通过上一次校准而在存储装置32中存储有后述的确定校正值的情况下,计算机24也可以将存储的确定校正值作为基本校正值而取得。在未存储有确定校正值的情况下,计算机24也可以取得0等规定的值作为基本校正值。或者,计算机24也可以取得操作人员通过输入装置34输入的值作为基本校正值。
[0054]
在步骤s105中,计算机24决定校正候选值。校正候选值在基本校正值δx0的附近决定。例如校正候选值包含使基本校正值δx0位移后的值与基本校正值δx0。例如校正候选值包含使基本校正值δx0以规定比例增大后的值。校正候选值包含使基本校正值δx0以规定比例减少后的值。例如校正候选值除了基本校正值δx0之外,还包含候选值δx1与δx2。
[0055][0056]
在式(2)中,规定比例a例如是0.1。但是,规定比例a也可以是与0.1不同的值。
[0057]
另外,校正候选值只要在三维坐标(x,y,z)中在基本校正值δx0的附近即可。位移的量并不局限于规定比例,也可以按照三维坐标(x,y,z)的每个轴赋予不同的位移量。例如也可以使x方向位移
±
0.1,使y方向位移
±
0.1,使z方向位移
±
0.05。或者,也可以使x方向位移
±
0.1,使y方向位移
±
0.1,使z方向位移
±
0。
[0058]
在步骤s106中,计算机24计算评价值。评价值表示规定部分的位置的真值与计算
值之间的误差的大小。详细地说,计算机24通过以下的式(3),计算评价值e。
[0059][0060]
在式(3)中,α、β、γ是权重系数。但是,也可以省略权重系数α、β、γ。在该情况下,在式(3)中,也可以取代权重系数α、β、γ而输入样本数。或者,也可以增大权重系数α、β、γ中的、所重视的姿态的权重系数。
[0061]
计算机24对于校正候选值δx0、δx1、δx2的各个,通过式(3)计算评价值e0、e1、e2。另外,校正候选值并不局限于三个,也可以比三个少,或者也可以比三个多。
[0062]
在步骤s107中,计算机24决定确定校正值。计算机24基于评价值e0、e1、e2,决定确定校正值。详细地说,计算机24将评价值e0、e1、e2中的最小者的校正候选值决定为确定校正值。例如在评价值e1最小时,将校正候选值δx1决定为确定校正值。
[0063]
在步骤s108中,计算机24更新基本校正值δx0。计算机24通过将基本校正值δx0置换为在步骤s107中决定的确定校正值,更新基本校正值δx0。更新后的基本校正值δx0保存于存储装置32。在进行下一次校准时,计算机24对更新后的基本校正值δx0执行上述的步骤s101至s108的处理。计算机24通过对参数的全部或者一部分执行上述的处理,决定各参数的基本校正值δx0。
[0064]
根据以上说明的本实施方式的控制系统,对于根据基本校正值δx0决定的多个校正候选值计算评价值。然后,根据评价值决定参数的确定校正值。因此,参数的校准的精度提高。由此,位置检测的精度提高。另外,也可以通过重复上述的处理来更新确定校正值。
[0065]
以上,说明了本发明的一实施方式,但本发明并不限定于上述实施方式,能够在不脱离发明的主旨的范围进行各种变更。
[0066]
作业机械1并不局限于液压挖掘机,也可以是轮式装载机、推土机、或者机动平地机等其他种类的作业机械。作业机械1的构成并不局限于上述,也可以被变更。
[0067]
计算机24也可以具备多个处理器。也可以由多个处理器分散执行上述的处理。计算机并不局限于1台,也可以由多个计算机分散执行上述的处理。例如图7是表示其他实施方式的控制系统的构成的框图。
[0068]
如图7所示,系统包含第一计算机24a与第二计算机24b。第一计算机24a具有与上述的实施方式的计算机24相同的构成。作业机械1包含通信装置39。第一计算机24a经由通信装置39与第二计算机24b进行通信。第二计算机24b配置于作业机械1的外部。第二计算机24b也可以配置于远离配置有作业机械1的作业现场的管理中心内。
[0069]
第二计算机24b经由4g、5g等移动体通信网络、卫星通信网络、lan、或者因特网等通信网络与第一计算机24a进行通信。第二计算机24b也可以是与多个作业机械进行通信的服务器。
[0070]
第二计算机24b与第一计算机24a相同,包含处理器43与存储装置44。第一计算机24a与第二计算机24b分散地执行上述的校准的处理。例如第一计算机24a将规定部分的位置的真实的位置与计算值向第二计算机24b发送。另外,第一计算机24a将上述的参数向第二计算机24b发送。另外,第一尺寸数据以及第二尺寸数据也可以预先保存于第二计算机24b的存储装置44。
[0071]
第二计算机24b执行步骤s104~s108的处理。第二计算机24b将更新后的基本校正
值δx0向第一计算机24a发送。第一计算机24a将更新后的基本校正值δx0保存于存储装置32。第一计算机24a基于更新后的基本校正值δx0,根据基准位置p1计算规定部分p2的位置。
[0072]
根据基准位置p1计算规定部分p2的位置的处理并不局限于上述的实施方式,也可以被变更、省略、或者追加。参数并不局限于上述的实施方式,也可以被变更、省略、或者追加。例如参数也可以包含工作油的液压、作业机械的重量、或者重心位置。参数也可以包含行驶装置(例如履带或者轮胎)的重量与尺寸。
[0073]
在上述的实施方式中,为了容易说明,省略了对作业机械1的左右方向上的位置的说明。但是,计算机24也可以基于作业机械1的左右方向上的位置相关的参数,根据基准位置p1计算规定部分p2的位置。主体2的第一姿态数据也可以包含主体2的倾侧角。主体2的倾侧角是主体2的左右方向相对于水平方向的倾斜角度。第一尺寸数据也可以包含主体2中的基准位置p1的左右方向的位置。第二尺寸数据也可以包含工作装置3中的规定部分p2的左右方向的位置。
[0074]
在上述的实施方式中,使用计算出的规定部分p2的位置将引导图像50显示于显示器35。但是,计算机24也可以使用计算出的规定部分p2的位置执行与上述的实施方式不同的处理。例如计算机24也可以使用计算出的规定部分p2的位置自动地控制工作装置3。计算机24也可以自动地控制工作装置3,以使规定部分p2沿图4所示的目标地形52移动。
[0075]
计算机24也可以在本次校准时的规定部分的位置与上次校准时的规定部分的位置相同时向显示器35输出报告信号。报告信号也可以包含推荐将其他位置选择为规定部分的位置的报告显示。例如如图8所示,当操作人员在本次校准时也选择了在上次校准时也选择的第一~第三位置c1-c3时,计算机24也可以输出报告信号,以选择其他位置c4-c6。或者,计算机24也可以在本次校准时选择了不在上次选择的第一~第三位置c1-c3的附近的规定部分的位置c4-c6时输出报告信号。
[0076]
工业上的可利用性
[0077]
根据本公开,能够提高作业机械中的位置检测的精度。
[0078]
附图标记说明
[0079]1ꢀꢀꢀꢀ
作业机械
[0080]2ꢀꢀꢀꢀ
主体
[0081]3ꢀꢀꢀꢀ
工作装置
[0082]
24
ꢀꢀꢀ
计算机
[0083]
36
ꢀꢀꢀ
位置传感器
[0084]
p1
ꢀꢀꢀ
基准位置
[0085]
p2
ꢀꢀꢀ
规定部分
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。