技术特征:
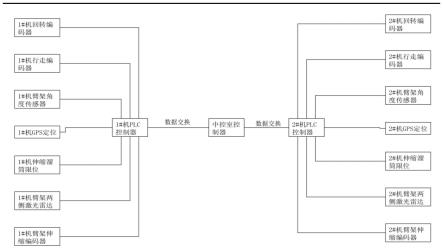
1.一种两台同轨道自动化装船机综合防碰撞方法,其特征在于包括以下步骤:(1)两台装船机的plc控制单元分别计算各自的大车行走距离、变幅角度以及回转角度,并将计算结果发送至中控室cpu;(2)两台装船机的plc控制单元分别根据数学模型设定输入输出值,计算单台装船机后部配重与尾车结构的防碰撞结果,并控制其动作;(3)两台装船机的plc控制单元分别根据数学模型设定输入输出值,计算单台装船机前部卸料斗与码头和走道的防碰撞一结果,并控制其动作;(4)两台装船机的plc控制单元分别根据数学模型设定输入输出值,计算单台装船机前部卸料斗与码头和走道的防碰撞二结果,并控制其动作;(5)两台装船机的plc控制单元分别根据数学模型设定输入输出值,计算单台装船机臂架与尾车结构的防碰撞结果;(6)中控室cpu根据数学模型设定输入输出值,计算两台装船机之间的防碰撞结果,并将防碰撞结果发送至两台装船机,两台装船机根据接收到的防碰撞结果来控制其动作。2.根据权利要求1所述的一种两台同轨道自动化装船机综合防碰撞方法,其特征在于:在上述步骤(1)中,大车行走距离是根据行走编码器与跟随轮的机械齿轮传动原理来确定,且其计算公式为:式中,l
t
为大车行走距离,单位为m;p
i
为圆周率;d为跟随轮直径;r
t
为行走编码器单圈脉冲数;v
0t
为行走编码器校准原始值;v
at
为行走编码器实时数据。3.根据权利要求1所述的一种两台同轨道自动化装船机综合防碰撞方法,其特征在于:在上述步骤(1)中,变幅编码器安装在臂架铰点,并根据此位置角度变化与变幅编码器数据变化的关系来确定变幅角度,其计算公式为:式中,a
b
为变幅编码器变化总角度;r
b
为变幅编码器单圈脉冲数;v
0b
为变幅编码器校准原始值;v
ab
为变幅编码器实时数据。4.根据权利要求1所述的一种两台同轨道自动化装船机综合防碰撞方法,其特征在于:在上述步骤(1)中,回转角度根据机械齿轮传动原理来确定,且其计算公式为:式中,a
t
为回转编码器变化总角度;r
s
为回转编码器单圈脉冲数;m
b
为大齿圈齿数;m
s
为小齿圈齿数;v
0s
为回转编码器校准原始值;v
as
为回转编码器实时数据;再通过逻辑判断计算回转实时角度a
a
,且逻辑判断方法为:a)如果0
°
≤a
t
≤360
°
,则a
a
=a
t
;b)如果-360
°
≤a
t
<0
°
,则a
a
=a
t
360;c)如果a
t
<-360
°
或者a
t
>360,则a
a
=a
t mod
±
360。5.根据权利要求1所述的一种两台同轨道自动化装船机综合防碰撞方法,其特征在于:将所需控制的条件扩大至普遍模型,列矩阵如下:
针对逻辑特点来建立数学模型,设每个条件的控制因子为:上述公式(4)应满足条件其中,i为条件序列号;j为单个条件对应值序列号;m为最大条件数目;n为单个条件最多数值区间序号;s
i
为条件是否需要参与考虑的系数。6.根据权利要求5所述的一种两台同轨道自动化装船机综合防碰撞方法,其特征在于:在上述步骤(2)中,单台装船机后部配重与尾车结构的防碰撞逻辑为需同时满足以下条件:(2.1)当变幅角度大于0
°
的条件不满足时,回转动作不允许在-30
°
和 30
°
之间工作;(2.2)当回转角度在-30
°
和 30
°
之间时,变幅角度不允许小于0
°
;(2.3)选中自动模式、手动模式、就地模式中任一种模式才可以进行动作。7.根据权利要求5所述的一种两台同轨道自动化装船机综合防碰撞方法,其特征在于:在上述步骤(3)中,单台装船机前部卸料斗与码头和走道的防碰撞一逻辑为需同时满足以下条件:(3.1)当回转角度在-35
°
和-30
°
之间或者 30
°
和 35
°
时,变幅的最小动作角度为-4
°
,伸缩溜筒必须保证在最高位置,臂架伸缩最小位置为6m;(3.2)当变幅角度大于-4
°
、伸缩溜筒必须保证在最高位置、以及臂架伸缩位置大于6m这三个条件没有同时满足时,回转不允许在-35
°
和-30
°
之间或者 30
°
和 35
°
工作;(3.3)当回转角度在-30
°
和-26
°
之间或者 26
°
和 30
°
时,变幅的最小动作角度为0
°
,伸缩溜筒必须保证在最高位置,臂架伸缩最小位置为12m;(3.4)当变幅角度大于0
°
、伸缩溜筒必须保证在最高位置、以及臂架伸缩位置大于12m这三个条件没有同时满足时,回转不允许在-30
°
和-26
°
之间或者 26
°
和 30
°
工作;(3.5)选中自动模式、手动模式、就地模式中任一种模式才可以进行动作。8.根据权利要求5所述的一种两台同轨道自动化装船机综合防碰撞方法,其特征在于:在上述步骤(4)中,单台装船机前部卸料斗与码头和走道的防碰撞二逻辑为需同时满足以下条件:
(4.1)当回转角度在-26
°
和-17
°
之间或者 17
°
和 26
°
时,变幅的最小动作角度为0
°
,伸缩溜筒必须保证在最高位置;(4.2)当变幅角度大于0
°
、以及伸缩溜筒必须保证在最高位置这两个条件没有同时满足时,回转不允许在-26
°
和-17
°
之间或者 17
°
和 26
°
工作;(4.3)当回转角度在
±
17
°
时,变幅的最小动作角度为4
°
,伸缩溜筒必须保证在最高位置;(4.4)当变幅角度大于4
°
、以及伸缩溜筒必须保证在最高位置这两个条件没有同时满足时,回转不允许在
±
17
°
工作;(4.5)选中自动模式、手动模式、就地模式中任一种模式才可以进行动作。9.根据权利要求5所述的一种两台同轨道自动化装船机综合防碰撞方法,其特征在于:在上述步骤(5)中,单台装船机臂架与尾车结构的防碰撞逻辑为需同时满足以下条件:(5.1)当回转角度小于-115
°
之间或者大于 115
°
时,变幅的最大动作角度为12
°
;(5.2)当变幅的最大动作角度为12
°
不满足时,回转不允许在小于-115
°
或者大于 115
°
工作;(5.3)选中自动模式、手动模式、就地模式中任一种模式才可以进行动作。10.根据权利要求5所述的一种两台同轨道自动化装船机综合防碰撞方法,其特征在于:在上述步骤(6)中,两台装船机之间的防碰撞逻辑为需同时满足以下条件:(6.1)当两台装船机的距离在82-88米时,若要使sl2回转角度在
±
17
°
之间,则变幅应保持在最大角度 15
°
、伸缩溜筒必须保证在最高位置;(6.2)当两台装船机的距离在82-88米时,若变幅角度 15
°
、以及伸缩溜筒必须保证在最高位置这两个条件没有同时满足,则回转不允许在
±
17
°
之间工作;(6.3)当两台装船机的距离在88-99米时,若要使sl2回转角度在
±
17
°
之间,则变幅应保持在最大角度 15
°
、伸缩溜筒必须保证在最高位置、臂架伸缩位置要大于8米;(6.4)当两台装船机的距离在88-99米时,若变幅角度 15
°
、伸缩溜筒必须保证在最高位置、以及臂架伸缩位置要大于8米这三个条件没有同时满足,则回转不允许在
±
17
°
之间工作;(6.5)当两台装船机的距离在99-104米时,若要使sl2回转角度在
±
17
°
之间,则变幅应保持在最大角度 15
°
、伸缩溜筒必须保证在最高位置、臂架伸缩要全部缩回;(6.6)当两台装船机的距离在99-104米时,若变幅角度 15
°
、伸缩溜筒必须保证在最高位置、以及臂架伸缩位置要全部缩回这三个条件没有同时满足,则回转不允许在
±
17
°
之间工作;(6.7)当两台装船机的距离在104-123米时,若要使sl2回转角度在
±
17
°
之间,则变幅应保持在最大角度 15
°
、伸缩溜筒必须保证在最高位置;(6.8)当两台装船机的距离在104-123米时,若变幅角度 15
°
、以及伸缩溜筒必须保证在最高位置这两个条件没有同时满足,则回转不允许在
±
17
°
之间工作;(6.9)选中自动模式、手动模式、就地模式中任一种模式才可以进行动作。
技术总结
本发明公开了一种两台同轨道自动化装船机综合防碰撞方法,包括以下步骤:(1)两台装船机PLC分别计算各自的大车行走距离、变幅角度以及回转角度并将计算结果发送至中控室CPU;(2)计算单台装船机后部配重与尾车结构的防碰撞结果,并控制其动作;(3)计算单台装船机前部卸料斗与码头和走道的防碰撞一结果,并控制其动作;(4)计算单台装船机前部卸料斗与码头和走道的防碰撞二结果,并控制其动作;(5)计算单台装船机臂架与尾车结构的防碰撞结果;(6)计算两台装船机之间的防碰撞结果,两台装船机根据接收到的防碰撞结果来控制其动作。本发明克服了安全防撞防护的巨大挑战,实现了装船机的全自动无人化操作模式。全自动无人化操作模式。全自动无人化操作模式。
技术研发人员:金建 崔益华 顾建峰 任进勇 王建
受保护的技术使用者:南通润邦重机有限公司
技术研发日:2022.03.16
技术公布日:2022/7/8
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。