1.本发明主要涉及高空轨道运输领域。
背景技术:
2.现有的货储搬运机构中,多数为平面轨道搬运,搬运高度低,占地面积广,对于有高度需求的货储情况并不是很理想,多为人工,或半人工操作,导致了人力操作难度高,操作空间大,效率低,成本高,对于高空轨道运输技术很少,尤其是驱动滑块机构。
技术实现要素:
3.本产品针对现今没有小型实用的高空轨道驱动滑块机构,利用现有的平面轨道驱动技术结合轨道运输的情况设计出可以在完全竖直的轨道上进行垂直运输的驱动滑块机构。
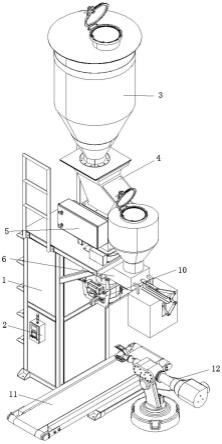
4.本专利产品高空轨道驱动滑块机构包括(数字表示图中标号,括号中表示的是数量):1,电机(1):标准件;2,双滑块限位板(2):非标设计集成组装件,通过螺钉的方式进行连接;3,抓取箱配置(2):本装置由3-1惰轮(2),3-2外部抓取箱(1),3-3连接轴(2),3-4垫片(2),3-5键(1),3-6同步轮(1)等构成,整个配置中的所有装备都可以通过螺钉或螺栓进行连接,其中除了3-2外部抓取箱外,都是标准件;4,圆柱销(4):标准件:5,中间防撞传感器组件(1):非标设计件,用来将机构主体固定在指定位置;;6,联轴器(2):标准件:7,主立柱载货台连接板(2):非标设计件,通过螺钉进行连接;8,零点感应块(1):非标设计件,螺钉连接;9,梯形撞块(1):非标设计件,螺钉连接10,抓取箱z轴连接板(1):非标设计件,螺钉连接,11,通用油盒(6):本装置由11-1通用油盒外框(6),11-2轴承(6),11-3固定轴(6),11-4垫圈(6)高空轨道驱动滑块的设计主要是为了实现高空物料运输转换的过程,能够在全自动的情况下实现物料在七米以内的高空中实现位置转换的过程。
附图说明
5.附图1完整版图片;
6.附图2爆炸图细节查看;
7.附图2-1抓取箱装配爆炸细节图
8.附图2-2通用油盒爆炸细节图
具体实施方式
9.本装置以10抓取箱z轴连接板为基础,整个装置通过螺钉进行连接,首先将1电机通过螺钉固定在10抓取箱z轴连接板上;随后将两块2双滑块限位板分布在1电机的两边通过螺钉固定在10抓取箱z轴连接板上;然后用螺钉将两个7主立柱载货台连接板固定在2双滑块限位板的下端;3抓取箱配置则固定在10抓取箱z轴连接板的两端,通过螺钉固定,3抓取箱配置内部标准件通过其上的孔位进行卡装或者螺纹固定,同时利用6联轴器和4圆柱销将3抓取箱配置以及1电机连接起来,利用电机驱动3抓取箱配置内的同步轮以及惰轮等;而5中间防撞传感器组件则通过螺钉固定在10抓取箱z轴连接板上,注意躲避1电机;随后将8零点感应块以及9梯形撞块通过螺钉前后固定在10抓取箱z轴连接板的中间位置;最后将11通用油盒固定在10抓取箱z轴连接板的后面,将数量确定正确后,整个高空轨道驱动滑块机构安装完成。技术总结
10.通过以上的安装方法,可以将整个高空轨道驱动滑块机构组装完成,按照附图所示,整个高空轨道驱动滑块机构的工作原理如下:高空轨道驱动滑块机构并不是完整设备,高空轨道驱动滑块机构是完整机构的核心部分,是整个机构的驱动核心。在操作的过程中,首先需要将高空轨道驱动滑块机构通过11通用油盒的卡槽装置装备到完整机构的轨道上,随后将3抓取箱配置内的同步轮与同步带进行啮合安装,在电机驱动后可以保证整个机构在轨道中的稳速移动。整个机构中需要plc进行信号调度的地方较少,主要是电机的启动和关闭。整个高空轨道驱动滑块机构仅利用电机的动力使用,通过同步带的联动,利用竖直型材机构进行七米高的货料搬运。
11.整个高空轨道驱动滑块的外观结构和设计原理全部都是独立设计的,鉴于目前国内并没有该相关产品,本发明产品所带来的有益效果是触目可视的:1、高空轨道驱动滑块机构的应用。高空物料货储移动,在7米的高空下使用全自动设备进行物料传递货储,无需人工协助。2、高空轨道驱动滑块机构的技术应用高空轨道驱动滑块机构构造复杂,包含了电机带动惰轮、同步轮,以及通用油盒曲型卡槽等,通过通用油盒以及同步轮的嵌合,保证整个机构在竖直轨道上受力均匀,保证其扭矩大小满足整个机构的需要,本机构的最高承重约80kg,最快速度达到4m/s。
12.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”“相连”“连接”等应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接连接,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
13.以上对本发明的一个实施例进行了详细说明,但所述内容仅为本发明的较佳实施例,不能被认为用于限定本发明的实施范围。凡依本发明申请范围所作的均等变化与改进等,均应仍归属于本发明的专利涵盖范围之内。
技术特征:
1.一种高空轨道驱动滑块,其特征在于:在竖直方向的轨道上在保证承重的情况下不发生角度倾斜,在只使用电机驱动的情况下,凭借惰轮与同步带的咬合带动固定在滑块上的物料搬运托盘,完成空间上竖直方向的货料搬运。2.根据权利要求1所述的高空轨道驱动滑块机构,所述支撑组件主要是7主立柱载货台连接板,10抓取箱z轴连接板等,7主立柱载货台连接板和10抓取箱z轴连接板都是非标设计件,通过螺钉进行连接。3.根据权利要求2所述的高空轨道驱动滑块机构,所述滑动组件主要是3抓取箱配置,11通用油盒等,他们是标准件和非标件的结合体,通过螺钉固定在滑块机构上,同时这两个组件是滑块机构与完整设计的连接部位,其中3抓取箱配置通过与同步带咬合连接,11通用油盒则通过嵌入式卡槽连接。4.根据权利要求3所述的高空轨道驱动滑块机构,所述固定件主要是1电机,2双滑块限位板,4圆柱销,5中间防撞传感器组件,6联轴器,8零点感应块,9梯形撞块,该结构中2双滑块限位板,5中间防撞传感器组件中多数为非标设计件,剩余组件则全部都由标准件组成,通过螺钉连接。
技术总结
本产品公布了一种高空轨道驱动滑块的安装方法,包括了电机,双滑块限位板,抓取箱配置,圆柱销,中间防撞传感器组件,联轴器,梯形撞块,零点感应块,主立柱载货台连接板,抓取箱Z轴连接板等,所述驱动滑块装置是完整机构的核心部位,通过电机的控制带动惰轮的转动从而达到整个滑块的移动,同时整个滑块机构中的通用油盒安装可以将整个滑块固定在指定的轨道上,保证整个滑块的受力基础,同时保证了滑块在移动的过程中不会出现惰轮与同步带之间咬合受力不均的情况。合受力不均的情况。合受力不均的情况。
技术研发人员:牛冬校 王博 杨新宇
受保护的技术使用者:沈阳德锐克智能科技有限公司
技术研发日:2022.03.15
技术公布日:2022/7/8
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。