1.本发明涉及机器人路径规划及运动控制技术领域,具体为一种考虑模糊绕障路径的消毒机器人控制方法及系统。
背景技术:
2.医院、传染病集中地以及酒店宾馆等环境中容易堆积对人体有害的微生物,必须依据规范指引对环境进行消毒,使用消毒机器人能够较好的实现消毒作业;消毒机器人进行消毒作业的过程中,不可避免的需要对过往的行人、小推车以及放置物等进行动态绕障,以便绕开障碍物继续进行作业。
3.然而,现有技术中的许多机器人控制方法,遇到障碍物时往往采用等待的方式解决,障碍物长久存在时,容易使机器人长时间保持在原位。
4.现有技术中也有许多的机器人控制方法会采用实时判断绕障需求的方法进行控制,例如公开号为cn112327620a,名称为兼顾绕障的移动机器人鲁棒控制方法及系统的中国发明专利公开文本,即公开了实时判断是否需要绕障,以获得移动机器人的实时运行轨迹之技术方案,这样的控制方法对于判断周期的设定极其严苛,设置不当的判断周期会使机器人系统在运行过程中产生过多及过大的抖动。
5.消毒机器人作为高度集成化的系统,如何在绕障的过程中选择合适的路径并保持稳定的运行成为亟待解决的问题。
技术实现要素:
6.本发明的目的在于提供一种考虑模糊绕障路径的消毒机器人控制方法及系统,能够对消毒机器人进行动态的模糊绕障以及位姿控制。
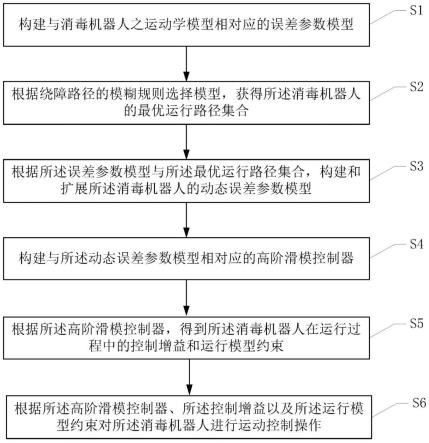
7.为实现上述目的,本发明提供如下技术方案:一种考虑模糊绕障路径的消毒机器人控制方法,包括下述步骤:
8.s1、构建与消毒机器人之运动学模型相对应的误差参数模型;
9.s2、根据绕障路径的模糊规则选择模型,获得所述消毒机器人的最优运行路径集合;
10.s3、根据所述误差参数模型与所述最优运行路径集合,构建和扩展所述消毒机器人的动态误差参数模型;
11.s4、构建与所述动态误差参数模型相对应的高阶滑模控制器;
12.s5、根据所述高阶滑模控制器,得到所述消毒机器人在运行过程中的控制增益和运行模型约束;
13.s6、根据所述高阶滑模控制器、所述控制增益以及所述运行模型约束对所述消毒机器人进行运动控制操作。
14.上述技术方案中,步骤s1中,所述消毒机器人之运动学模型具体为:
[0015][0016]
式中:为所述消毒机器人当前位置的x轴坐标的导数,为所述消毒机器人当前位置的y轴坐标的导数,为当前所述消毒机器人在运行过程中的偏角,l为所述消毒机器人的中心点位置偏移量,v为所述消毒机器人的线速度,ω为所述消毒机器人的角速度,g为中间变量,g的矩阵形式为:
[0017][0018]
上述技术方案中,步骤s1中,所述误差参数模型的具体构建方法为:
[0019]
s1.1、根据所述消毒机器人之运动学模型,求解得到所述消毒机器人的输入方程为:
[0020][0021]
s1.2、根据所述消毒机器人的输入方程,设计所述误差参数模型为:
[0022][0023]
式中:l(x)为跟踪误差的时变参数,点坐标(x,y)为所述消毒机器人当前所处的实际坐标,点坐标(xr,yr)为所述消毒机器人当前的参考坐标,e
x
为所述消毒机器人在x轴方向下的误差,ey为所述消毒机器人在y轴方向下的误差;
[0024]ex
和ey的定义为:e
x
=x
r-x,ey=y
r-y;
[0025]
s1.3、根据所述误差参数模型,得到所述消毒机器人的系统误差方程为:
[0026][0027]
式中:e=[e
x
,ey]
t
,为所述消毒机器人的误差之导数,f(e)为所述消毒机器人的参数误差之集合,具体为f(e)=[l(x)e
x
,l(x)ey]
t
,为中间变量。
[0028]
上述技术方案中,步骤s2中,所述绕障路径的模糊规则选择模型具体为:
[0029][0030]
式中:
[0031]
p(x)即为所述绕障路径的模糊规则选择模型之函数集合;
[0032]
of为无障碍区间的集合,为无障碍区间内的隶属度函数,具体为:
[0033][0034]
其中有,p={p1,pn},代表所述消毒机器人的无障碍路径集合;
[0035]oo
为含障碍物区间的集合,为含障碍物区间内的隶属度函数,具
体为:
[0036][0037]
其中有,p={p1,pn},代表所述消毒机器人的含障碍物路径集合。
[0038]
上述技术方案中,步骤s2中,所述最优运行路径集合的具体获得方法为:
[0039]
s2.1、将所述绕障路径的模糊规则选择模型之函数集合p(x)展开为矩阵函数,表示如下:
[0040][0041]
式中:o
fi=1,2;j=1,...,n
和o
oi=1,2;j=1,...,n
为所述消毒机器人之路径选择的具体路径值;
[0042]
s2.2、由所述绕障路径的模糊规则选择模型之函数集合p(x)的矩阵函数、无障碍区间内的隶属度函数以及含障碍物区间内的隶属度函数得所述最优运行路径集合如下:
[0043][0044]
上述技术方案中,步骤s3中,所述动态误差参数模型具体为:
[0045][0046]
式中:e
x
为所述消毒机器人在x轴方向下的误差,为e
x
的导数;ey为所述消毒机器人在y轴方向下的误差,为ey的导数;e
ω
为所述消毒机器人在运行过程中的角度误差,为e
ω
的导数;
[0047]
u1为所述消毒机器人的系统输入,其定义为u1=-v vrcose3;
[0048]
u2也为所述消毒机器人的系统输入,其定义为u2=ω
r-ω。
[0049]
上述技术方案中,步骤s4中,与所述动态误差参数模型相对应的高阶滑模控制器为分数阶高阶滑模控制器,具体为:
[0050][0051]
式中:为所述消毒机器人的系统输入之导数,μ
i1
和μ
i2
为所述消毒机器人的控制增益,α
i1
和α
i2
为所述高阶滑模控制器的分数阶阶次,δ
i=1,2
和υi为中间变量,且δ1=e1 k1e2,δ2=e
3-k2arctan(e2),sgn()为符号函数。
[0052]
上述技术方案中,步骤s5中,所述消毒机器人在运行过程中的运行模型约束具体为:
[0053][0054][0055]
式中:v
r min
为所述消毒机器人的输入线速度之最小参考值,ω
max
为所述消毒机器人的角速度之最大值,p为一对称正定矩阵且满足:
[0056][0057]
其中有,m
i=1,2,3
均为对称的正定矩阵,q和r为具有合适维度的矩阵。
[0058]
上述技术方案中,步骤s5中,所述消毒机器人在运行过程中的控制增益具体为:
[0059][0060]
μi=[μ
i1
,μ
i2
]
t
=p-1
q;
[0061]
式中:μi为所述运行模型约束的集合。
[0062]
一种考虑模糊绕障路径的消毒机器人控制系统,包括:
[0063]
消毒机器人的运动学模型;
[0064]
误差参数模型,其与所述消毒机器人的运动学模型相对应;
[0065]
模糊规则选择模型,用于获得所述消毒机器人的最优运行路径集合;
[0066]
动态误差参数模型,其由所述误差参数模型与所述最优运行路径集合构建和扩展而来;
[0067]
高阶滑模控制器,其与所述动态误差参数模型相对应,用于对所述消毒机器人进行运动控制操作;
[0068]
控制增益,用于对所述消毒机器人进行运动控制操作;以及,
[0069]
运行模型约束,用于对所述消毒机器人进行运动控制操作。
[0070]
与现有技术相比,本发明的有益效果是:该种考虑模糊绕障路径的消毒机器人控制方法及系统,其动态误差参数模型中,包含了与消毒机器人之运动学模型相对应的误差参数模型,能够描述消毒机器人在运动过程中的误差,还包含了消毒机器人的最优运行路径集合,能够对消毒机器人进行动态模糊避障,基于此动态误差参数模型的高阶滑模控制器能够对消毒机器人进行动态的模糊绕障以及位姿控制;本发明实现了消毒机器人运行过程中的绕障路径实时选择、绕障误差实时推导以及路径的精确跟踪,得到了一个多元化且集成度高的动态误差参数模型,提高了消毒机器人在绕障和误差跟踪过程中的控制精度和鲁棒性。
附图说明
[0071]
图1为本发明的实施例一的步骤流程图。
[0072]
图2为本发明的实施例二的结构示意图。
[0073]
图3为本发明的实施例三的步骤流程图。
具体实施方式
[0074]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0075]
实施例一:
[0076]
请参阅图1,本实施例提供一种考虑模糊绕障路径的消毒机器人控制方法,应用在使用高阶滑模控制器进行运动控制的消毒机器人上。
[0077]
该种考虑模糊绕障路径的消毒机器人控制方法包括下述步骤:
[0078]
s1、构建与消毒机器人之运动学模型相对应的误差参数模型;
[0079]
s2、根据绕障路径的模糊规则选择模型,获得所述消毒机器人的最优运行路径集合;
[0080]
s3、根据所述误差参数模型与所述最优运行路径集合,构建和扩展所述消毒机器人的动态误差参数模型;
[0081]
s4、构建与所述动态误差参数模型相对应的高阶滑模控制器;
[0082]
s5、根据所述高阶滑模控制器,得到所述消毒机器人在运行过程中的控制增益和运行模型约束;
[0083]
s6、根据所述高阶滑模控制器、所述控制增益以及所述运行模型约束对所述消毒机器人进行运动控制操作。
[0084]
具体地,步骤s1中,所述消毒机器人之运动学模型具体为:
[0085][0086]
式中:为所述消毒机器人当前位置的x轴坐标的导数,为所述消毒机器人当前位置的y轴坐标的导数,为当前所述消毒机器人在运行过程中的偏角,l为所述消毒机器人的中心点位置偏移量,v为所述消毒机器人的线速度,ω为所述消毒机器人的角速度,g为中间变量,g的矩阵形式为:
[0087][0088]
在需要消毒机器人进行消毒的场所中构建坐标系后,消毒机器人当前位置的x轴坐标和y轴坐标可以通过消毒机器人的位置记录装置而获取;消毒机器人的偏角和中心点位置偏移量l可以通过消毒机器人的位姿传感器而获取;消毒机器人的线速度v和角速度ω可以通过消毒机器人的速度传感器而获取。
[0089]
构建运动学模型后,能够通过消毒机器人当前位置的x轴坐标及其导数、y轴坐标及其导数,以及消毒机器人的偏角中心点位置偏移量l、线速度v和角速度ω来描述消毒机器人的整个运动过程,为构建消毒机器人的误差参数模型提供数学基础。
[0090]
具体地,步骤s1中,所述误差参数模型的具体构建方法为:
[0091]
s1.1、根据所述消毒机器人之运动学模型,求解得到所述消毒机器人的输入方程为:
[0092][0093]
本步骤中,对消毒机器人之运动学模型求解后,即可得到消毒机器人的线速度v和角速度ω与消毒机器人当前位置的x轴坐标和y轴坐标以及消毒机器人的偏角和中心点位置偏移量l的关系,通过消毒机器人的位置记录装置和位姿传感器的读数即可描述消毒机器人的线速度v和角速度ω。
[0094]
s1.2、根据所述消毒机器人的输入方程,设计所述误差参数模型为:
[0095][0096]
式中:l(x)为跟踪误差的时变参数,点坐标(x,y)为所述消毒机器人当前所处的实际坐标,点坐标(xr,yr)为所述消毒机器人当前的参考坐标,e
x
为所述消毒机器人在x轴方向下的误差,ey为所述消毒机器人在y轴方向下的误差;
[0097]ex
和ey的定义为:e
x
=x
r-x,ey=y
r-y;
[0098]
s1.3、根据所述误差参数模型,得到所述消毒机器人的系统误差方程为:
[0099][0100]
式中:e=[e
x
,ey]
t
,为所述消毒机器人的误差之导数,f(e)为所述消毒机器人的参数误差之集合,具体为f(e)=[l(x)e
x
,l(x)ey]
t
,为中间变量。
[0101]
该误差参数模型,通过消毒机器人的位置记录装置和位姿传感器的读数,结合参考坐标(xr,yr)、消毒机器人在x轴方向下的误差e
x
以及消毒机器人在y轴方向下的误差ey即可描述消毒机器人在运动过程中的误差;其输入数据和误差参数均简洁而准确,节约计算资源的同时,能够准确描述消毒机器人在运动过程中的误差。
[0102]
具体地,步骤s2中,所述绕障路径的模糊规则选择模型具体为:
[0103][0104]
式中:
[0105]
p(x)即为所述绕障路径的模糊规则选择模型之函数集合;
[0106]
of为无障碍区间的集合,为无障碍区间内的隶属度函数,具体为:
[0107][0108]
其中有,p={p1,pn},代表所述消毒机器人的无障碍路径集合;
[0109]oo
为含障碍物区间的集合,为含障碍物区间内的隶属度函数,具体为:
[0110]
[0111]
其中有,p={p1,pn},代表所述消毒机器人的含障碍物路径集合。
[0112]
在需要消毒机器人进行消毒的场所中构建坐标系后,通过各台消毒机器人上的视觉传感器、超声波传感器以及光电传感器识别障碍物,还可以通过场所中的摄像头以及视觉传感器识别障碍物;障碍物被识别后,将具有障碍物的坐标动态地添加至含障碍物区间集合,将不具有障碍物的坐标动态地添加至无障碍区间集合,并动态刷新含障碍物区间集合和无障碍区间集合;消毒机器人在规划的路径经过含障碍物区间时,即将该路径动态地添加至含障碍物路径集合,消毒机器人在规划的路径不经过任何含障碍物区间集合时(该路径仅经过无障碍区间),即将该路径动态地添加至无障碍路径集合,并根据含障碍物区间集合和无障碍区间集合的变化而动态刷新含障碍物路径集合和无障碍路径集合。
[0113]
具体地,步骤s2中,所述最优运行路径集合的具体获得方法为:
[0114]
s2.1、将所述绕障路径的模糊规则选择模型之函数集合p(x)展开为矩阵函数,表示如下:
[0115][0116]
式中:o
fi=1,2;j=1,...,n
和o
oi=1,2;j=1,...,n
为所述消毒机器人之路径选择的具体路径值;
[0117]
s2.2、由所述绕障路径的模糊规则选择模型之函数集合p(x)的矩阵函数、无障碍区间内的隶属度函数以及含障碍物区间内的隶属度函数得所述最优运行路径集合如下:
[0118][0119]
具体地,步骤s3中,所述动态误差参数模型具体为:
[0120][0121]
式中:e
x
为所述消毒机器人在x轴方向下的误差,为e
x
的导数;ey为所述消毒机器人在y轴方向下的误差,为ey的导数;e
ω
为所述消毒机器人在运行过程中的角度误差,为e
ω
的导数;
[0122]
u1为所述消毒机器人的系统输入,其定义为u1=-v vrcose3;
[0123]
u2也为所述消毒机器人的系统输入,其定义为u2=ω
r-ω。
[0124]
在该动态误差参数模型中,包含了与消毒机器人之运动学模型相对应的误差参数模型e
x
、ey以及能够描述消毒机器人在运动过程中的误差,还包含了消毒机器人的最优运行路径集合的函数集合p(x),能够对消毒机器人进行动态模糊避障。
[0125]
具体地,步骤s4中,与所述动态误差参数模型相对应的高阶滑模控制器为分数阶高阶滑模控制器,具体为:
[0126][0127]
式中:为所述消毒机器人的系统输入之导数,μ
i1
和μ
i2
为所述消毒机器人的控制增益,α
i1
和α
i2
为所述高阶滑模控制器的分数阶阶次,δ
i=1,2
和υi为中间变量,且δ1=e1 k1e2,δ2=e
3-k2arctan(e2),sgn()为符号函数。
[0128]
具体地,步骤s5中,所述消毒机器人在运行过程中的运行模型约束具体为:
[0129][0130][0131]
式中:v
r min
为所述消毒机器人的输入线速度之最小参考值,ω
max
为所述消毒机器人的角速度之最大值,p为一对称正定矩阵且满足:
[0132][0133]
其中有,m
i=1,2,3
均为对称的正定矩阵,q和r为具有合适维度的矩阵。
[0134]
具体地,步骤s5中,所述消毒机器人在运行过程中的控制增益具体为:
[0135][0136]
μi=[μ
i1
,μ
i2
]
t
=p-1
q;
[0137]
式中:μi为所述运行模型约束的集合。
[0138]
该种考虑模糊绕障路径的消毒机器人控制方法,其动态误差参数模型中,包含了与消毒机器人之运动学模型相对应的误差参数模型,能够描述消毒机器人在运动过程中的误差,还包含了消毒机器人的最优运行路径集合,能够对消毒机器人进行动态模糊避障,基于此动态误差参数模型的高阶滑模控制器能够对消毒机器人进行动态的模糊绕障以及位姿控制;本发明实现了消毒机器人运行过程中的绕障路径实时选择、绕障误差实时推导以及路径的精确跟踪,得到了一个多元化且集成度高的动态误差参数模型,提高了消毒机器人在绕障和误差跟踪过程中的控制精度和鲁棒性。
[0139]
实施例二:
[0140]
请参阅图2,本实施例提供一种考虑模糊绕障路径的消毒机器人控制系统,应用在使用高阶滑模控制器进行运动控制的消毒机器人上。
[0141]
该种考虑模糊绕障路径的消毒机器人控制系统包括:
[0142]
消毒机器人的运动学模型;
[0143]
误差参数模型,其与所述消毒机器人的运动学模型相对应;
[0144]
模糊规则选择模型,用于获得所述消毒机器人的最优运行路径集合;
[0145]
动态误差参数模型,其由所述误差参数模型与所述最优运行路径集合构建和扩展而来;
[0146]
高阶滑模控制器,其与所述动态误差参数模型相对应,用于对所述消毒机器人进行运动控制操作;
[0147]
控制增益,用于对所述消毒机器人进行运动控制操作;以及,
[0148]
运行模型约束,用于对所述消毒机器人进行运动控制操作。
[0149]
具体地,所述消毒机器人之运动学模型具体为:
[0150][0151]
式中:为所述消毒机器人当前位置的x轴坐标的导数,为所述消毒机器人当前位置的y轴坐标的导数,为当前所述消毒机器人在运行过程中的偏角,l为所述消毒机器人的中心点位置偏移量,v为所述消毒机器人的线速度,ω为所述消毒机器人的角速度,g为中间变量,g的矩阵形式为:
[0152][0153]
在需要消毒机器人进行消毒的场所中构建坐标系后,消毒机器人当前位置的x轴坐标和y轴坐标可以通过消毒机器人的位置记录装置而获取;消毒机器人的偏角和中心点位置偏移量l可以通过消毒机器人的位姿传感器而获取;消毒机器人的线速度v和角速度ω可以通过消毒机器人的速度传感器而获取。
[0154]
构建运动学模型后,能够通过消毒机器人当前位置的x轴坐标及其导数、y轴坐标及其导数,以及消毒机器人的偏角中心点位置偏移量l、线速度v和角速度ω来描述消毒机器人的整个运动过程,为构建消毒机器人的误差参数模型提供数学基础。
[0155]
具体地,所述误差参数模型的具体构建方法为:
[0156]
s1.1、根据所述消毒机器人之运动学模型,求解得到所述消毒机器人的输入方程为:
[0157][0158]
本步骤中,对消毒机器人之运动学模型求解后,即可得到消毒机器人的线速度v和角速度ω与消毒机器人当前位置的x轴坐标和y轴坐标以及消毒机器人的偏角和中心点位置偏移量l的关系,通过消毒机器人的位置记录装置和位姿传感器的读数即可描述消毒机器人的线速度v和角速度ω。
[0159]
s1.2、根据所述消毒机器人的输入方程,设计所述误差参数模型为:
[0160][0161]
式中:l(x)为跟踪误差的时变参数,点坐标(x,y)为所述消毒机器人当前所处的实际坐标,点坐标(xr,yr)为所述消毒机器人当前的参考坐标,e
x
为所述消毒机器人在x轴方向下的误差,ey为所述消毒机器人在y轴方向下的误差;
[0162]ex
和ey的定义为:e
x
=x
r-x,ey=y
r-y;
[0163]
s1.3、根据所述误差参数模型,得到所述消毒机器人的系统误差方程为:
[0164][0165]
式中:e=[e
x
,ey]
t
,为所述消毒机器人的误差之导数,f(e)为所述消毒机器人的参数误差之集合,具体为f(e)=[l(x)e
x
,l(x)ey]
t
,为中间变量。
[0166]
该误差参数模型,通过消毒机器人的位置记录装置和位姿传感器的读数,结合参考坐标(xr,yr)、消毒机器人在x轴方向下的误差e
x
以及消毒机器人在y轴方向下的误差ey即可描述消毒机器人在运动过程中的误差;其输入数据和误差参数均简洁而准确,节约计算资源的同时,能够准确描述消毒机器人在运动过程中的误差。
[0167]
具体地,所述绕障路径的模糊规则选择模型具体为:
[0168][0169]
式中:
[0170]
p(x)即为所述绕障路径的模糊规则选择模型之函数集合;
[0171]
of为无障碍区间的集合,为无障碍区间内的隶属度函数,具体为:
[0172][0173]
其中有,p={p1,pn},代表所述消毒机器人的无障碍路径集合;
[0174]oo
为含障碍物区间的集合,为含障碍物区间内的隶属度函数,具体为:
[0175][0176]
其中有,p={p1,pn},代表所述消毒机器人的含障碍物路径集合。
[0177]
在需要消毒机器人进行消毒的场所中构建坐标系后,通过各台消毒机器人上的视觉传感器、超声波传感器以及光电传感器识别障碍物,还可以通过场所中的摄像头以及视觉传感器识别障碍物;障碍物被识别后,将具有障碍物的坐标动态地添加至含障碍物区间集合,将不具有障碍物的坐标动态地添加至无障碍区间集合,并动态刷新含障碍物区间集合和无障碍区间集合;消毒机器人在规划的路径经过含障碍物区间时,即将该路径动态地添加至含障碍物路径集合,消毒机器人在规划的路径不经过任何含障碍物区间集合时(该路径仅经过无障碍区间),即将该路径动态地添加至无障碍路径集合,并根据含障碍物区间集合和无障碍区间集合的变化而动态刷新含障碍物路径集合和无障碍路径集合。
[0178]
具体地,所述最优运行路径集合的具体获得方法为:
[0179]
s2.1、将所述绕障路径的模糊规则选择模型之函数集合p(x)展开为矩阵函数,表示如下:
[0180]
[0181]
式中:o
fi=1,2;j=1,...,n
和o
oi=1,2;j=1,...,n
为所述消毒机器人之路径选择的具体路径值;
[0182]
s2.2、由所述绕障路径的模糊规则选择模型之函数集合p(x)的矩阵函数、无障碍区间内的隶属度函数以及含障碍物区间内的隶属度函数得所述最优运行路径集合如下:
[0183][0184]
具体地,所述动态误差参数模型具体为:
[0185][0186]
式中:e
x
为所述消毒机器人在x轴方向下的误差,为e
x
的导数;ey为所述消毒机器人在y轴方向下的误差,为ey的导数;e
ω
为所述消毒机器人在运行过程中的角度误差,为e
ω
的导数;
[0187]
u1为所述消毒机器人的系统输入,其定义为u1=-v vrcose3;
[0188]
u2也为所述消毒机器人的系统输入,其定义为u2=ω
r-ω。
[0189]
在该动态误差参数模型中,包含了与消毒机器人之运动学模型相对应的误差参数模型e
x
、ey以及能够描述消毒机器人在运动过程中的误差,还包含了消毒机器人的最优运行路径集合的函数集合p(x),能够对消毒机器人进行动态模糊避障。
[0190]
具体地,与所述动态误差参数模型相对应的高阶滑模控制器为分数阶高阶滑模控制器,具体为:
[0191][0192]
式中:为所述消毒机器人的系统输入之导数,μ
i1
和μ
i2
为所述消毒机器人的控制增益,α
i1
和α
i2
为所述高阶滑模控制器的分数阶阶次,δ
i=1,2
和υi为中间变量,且δ1=e1 k1e2,δ2=e
3-k2arctan(e2),sgn()为符号函数。
[0193]
具体地,所述消毒机器人在运行过程中的运行模型约束具体为:
[0194][0195][0196]
式中:v
r min
为所述消毒机器人的输入线速度之最小参考值,ω
max
为所述消毒机器人的角速度之最大值,p为一对称正定矩阵且满足:
[0197]
[0198]
其中有,m
i=1,2,3
均为对称的正定矩阵,q和r为具有合适维度的矩阵。
[0199]
具体地,所述消毒机器人在运行过程中的控制增益具体为:
[0200][0201]
μi=[μ
i1
,μ
i2
]
t
=p-1
q;
[0202]
式中:μi为所述运行模型约束的集合。
[0203]
该种考虑模糊绕障路径的消毒机器人控制系统,其动态误差参数模型中,包含了与消毒机器人之运动学模型相对应的误差参数模型,能够描述消毒机器人在运动过程中的误差,还包含了消毒机器人的最优运行路径集合,能够对消毒机器人进行动态模糊避障,基于此动态误差参数模型的高阶滑模控制器能够对消毒机器人进行动态的模糊绕障以及位姿控制;本发明实现了消毒机器人运行过程中的绕障路径实时选择、绕障误差实时推导以及路径的精确跟踪,得到了一个多元化且集成度高的动态误差参数模型,提高了消毒机器人在绕障和误差跟踪过程中的控制精度和鲁棒性。
[0204]
实施例三:
[0205]
请参阅图3,本实施例提供一种考虑模糊绕障路径的消毒机器人控制方法,应用在使用高阶滑模控制器进行运动控制的消毒机器人上。
[0206]
该种考虑模糊绕障路径的消毒机器人控制方法包括下述步骤:
[0207]
s1、构建与消毒机器人之运动学模型相对应的误差参数模型;
[0208]
s2、根据绕障路径的模糊规则选择模型,获得所述消毒机器人的最优运行路径集合;
[0209]
s3、根据所述误差参数模型与所述最优运行路径集合,构建和扩展所述消毒机器人的动态误差参数模型;
[0210]
s4、构建与所述动态误差参数模型相对应的高阶滑模控制器;
[0211]
s5、根据所述高阶滑模控制器对所述消毒机器人进行运动控制操作。
[0212]
具体地,步骤s1中,所述消毒机器人之运动学模型具体为:
[0213][0214]
式中:为所述消毒机器人当前位置的x轴坐标的导数,为所述消毒机器人当前位置的y轴坐标的导数,为当前所述消毒机器人在运行过程中的偏角,l为所述消毒机器人的中心点位置偏移量,v为所述消毒机器人的线速度,ω为所述消毒机器人的角速度,g为中间变量,g的矩阵形式为:
[0215][0216]
在需要消毒机器人进行消毒的场所中构建坐标系后,消毒机器人当前位置的x轴坐标和y轴坐标可以通过消毒机器人的位置记录装置而获取;消毒机器人的偏角和中心点位置偏移量l可以通过消毒机器人的位姿传感器而获取;消毒机器人的线速度v和角速度ω可以通过消毒机器人的速度传感器而获取。
[0217]
构建运动学模型后,能够通过消毒机器人当前位置的x轴坐标及其导数、y轴坐标
及其导数,以及消毒机器人的偏角中心点位置偏移量l、线速度v和角速度ω来描述消毒机器人的整个运动过程,为构建消毒机器人的误差参数模型提供数学基础。
[0218]
具体地,步骤s1中,所述误差参数模型的具体构建方法为:
[0219]
s1.1、根据所述消毒机器人之运动学模型,求解得到所述消毒机器人的输入方程为:
[0220][0221]
本步骤中,对消毒机器人之运动学模型求解后,即可得到消毒机器人的线速度v和角速度ω与消毒机器人当前位置的x轴坐标和y轴坐标以及消毒机器人的偏角和中心点位置偏移量l的关系,通过消毒机器人的位置记录装置和位姿传感器的读数即可描述消毒机器人的线速度v和角速度ω。
[0222]
s1.2、根据所述消毒机器人的输入方程,设计所述误差参数模型为:
[0223][0224]
式中:l(x)为跟踪误差的时变参数,点坐标(x,y)为所述消毒机器人当前所处的实际坐标,点坐标(xr,yr)为所述消毒机器人当前的参考坐标,e
x
为所述消毒机器人在x轴方向下的误差,ey为所述消毒机器人在y轴方向下的误差;
[0225]ex
和ey的定义为:e
x
=x
r-x,ey=y
r-y;
[0226]
s1.3、根据所述误差参数模型,得到所述消毒机器人的系统误差方程为:
[0227][0228]
式中:e=[e
x
,ey]
t
,为所述消毒机器人的误差之导数,f(e)为所述消毒机器人的参数误差之集合,具体为f(e)=[l(x)e
x
,l(x)ey]
t
,为中间变量。
[0229]
该误差参数模型,通过消毒机器人的位置记录装置和位姿传感器的读数,结合参考坐标(xr,yr)、消毒机器人在x轴方向下的误差e
x
以及消毒机器人在y轴方向下的误差ey即可描述消毒机器人在运动过程中的误差;其输入数据和误差参数均简洁而准确,节约计算资源的同时,能够准确描述消毒机器人在运动过程中的误差。
[0230]
具体地,步骤s2中,所述绕障路径的模糊规则选择模型具体为:
[0231][0232]
式中:
[0233]
p(x)即为所述绕障路径的模糊规则选择模型之函数集合;
[0234]
of为无障碍区间的集合,为无障碍区间内的隶属度函数,具体为:
[0235][0236]
其中有,p={p1,pn},代表所述消毒机器人的无障碍路径集合;
[0237]oo
为含障碍物区间的集合,为含障碍物区间内的隶属度函数,具体为:
[0238][0239]
其中有,p={p1,pn},代表所述消毒机器人的含障碍物路径集合。
[0240]
在需要消毒机器人进行消毒的场所中构建坐标系后,通过各台消毒机器人上的视觉传感器、超声波传感器以及光电传感器识别障碍物,还可以通过场所中的摄像头以及视觉传感器识别障碍物;障碍物被识别后,将具有障碍物的坐标动态地添加至含障碍物区间集合,将不具有障碍物的坐标动态地添加至无障碍区间集合,并动态刷新含障碍物区间集合和无障碍区间集合;消毒机器人在规划的路径经过含障碍物区间时,即将该路径动态地添加至含障碍物路径集合,消毒机器人在规划的路径不经过任何含障碍物区间集合时(该路径仅经过无障碍区间),即将该路径动态地添加至无障碍路径集合,并根据含障碍物区间集合和无障碍区间集合的变化而动态刷新含障碍物路径集合和无障碍路径集合。
[0241]
具体地,步骤s2中,所述最优运行路径集合的具体获得方法为:
[0242]
s2.1、将所述绕障路径的模糊规则选择模型之函数集合p(x)展开为矩阵函数,表示如下:
[0243][0244]
式中:o
fi=1,2;j=1,...,n
和o
oi=1,2;j=1,...,n
为所述消毒机器人之路径选择的具体路径值;
[0245]
s2.2、由所述绕障路径的模糊规则选择模型之函数集合p(x)的矩阵函数、无障碍区间内的隶属度函数以及含障碍物区间内的隶属度函数得所述最优运行路径集合如下:
[0246][0247]
具体地,步骤s3中,所述动态误差参数模型具体为:
[0248][0249]
式中:e
x
为所述消毒机器人在x轴方向下的误差,为e
x
的导数;ey为所述消毒机器人在y轴方向下的误差,为ey的导数;e
ω
为所述消毒机器人在运行过程中的角度误差,为e
ω
的导数;
[0250]
u1为所述消毒机器人的系统输入,其定义为u1=-v vrcose3;
[0251]
u2也为所述消毒机器人的系统输入,其定义为u2=ω
r-ω。
[0252]
在该动态误差参数模型中,包含了与消毒机器人之运动学模型相对应的误差参数
模型e
x
、ey以及能够描述消毒机器人在运动过程中的误差,还包含了消毒机器人的最优运行路径集合的函数集合p(x),能够对消毒机器人进行动态模糊避障。
[0253]
具体地,步骤s4中,与所述动态误差参数模型相对应的高阶滑模控制器为分数阶高阶滑模控制器,具体为:
[0254][0255]
式中:为所述消毒机器人的系统输入之导数,μ
i1
和μ
i2
为所述消毒机器人的控制增益,α
i1
和α
i2
为所述高阶滑模控制器的分数阶阶次,δ
i=1,2
和υi为中间变量,且δ1=e1 k1e2,δ2=e
3-k2arctan(e2),sgn()为符号函数。
[0256]
该种考虑模糊绕障路径的消毒机器人控制方法,其动态误差参数模型中,包含了与消毒机器人之运动学模型相对应的误差参数模型,能够描述消毒机器人在运动过程中的误差,还包含了消毒机器人的最优运行路径集合,能够对消毒机器人进行动态模糊避障,基于此动态误差参数模型的高阶滑模控制器能够对消毒机器人进行动态的模糊绕障以及位姿控制;本发明实现了消毒机器人运行过程中的绕障路径实时选择、绕障误差实时推导以及路径的精确跟踪,得到了一个多元化且集成度高的动态误差参数模型,提高了消毒机器人在绕障和误差跟踪过程中的控制精度和鲁棒性。
[0257]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。