1.本实用新型涉及工业机器人设计技术领域,更具体地说,本实用新型涉及一种智能化曲面自适应轮式爬壁机器人。
背景技术:
2.随着移动机器人的迅速发展,可应用于管道及壁面上移动的爬壁机器人得到了国内外各界的高度重视,并逐渐在军事、工业以及民用等领域得到广泛应用。在许多大型石化管道焊缝检测方面,传统人工检测成本高、效率低、危险系数高,因此,使用爬壁机器人代替人工进行管道表面缺陷检测具有重要意义。
3.目前,爬壁机器人技术的研究主要集中在移动技术和吸附技术。在移动技术方面,轮式爬壁机器人因其结构简便,运动灵活性好,应用的较为广泛。在吸附技术方面,对于铁壁表面,磁吸附为爬壁机器人较为常用吸附方式。其中磁吸附主要分为电磁吸附和永磁吸附,在应用方面,永磁吸附相较于电磁吸附来说磁吸附力更为稳定,且无需额外供电,因此应用也更为广泛。
4.针对现有永磁吸附轮式爬壁机器人存在的问题进行研究,主要可分为以下几种:
5.(1)在满足对壁面吸附力的情况下,运动灵活性较差、转向半径大。
6.(2)爬壁机器人在作业时,负载能力较差,无法携带工具作业。
7.(3)运动稳定性较差,对于曲面、凹凸面等非常规作业环境,爬壁机器人的适应性不强,容易发生翻转、跌落等情况。
8.(4)磁吸附力不可调,面对不同倾斜程度的铁壁面,爬壁机器人所需的磁吸附力也不同,根据爬壁机器人所处工作壁面位置的不同来调节磁吸附力的大小,可以有效减小能源消耗,提升作业效率,便于拆卸。
技术实现要素:
9.为了克服现有技术的上述缺陷,本实用新型的实施例提供一种曲面自适应轮式爬壁机器,以解决上述背景技术中提出的问题。
10.为实现上述目的,本实用新型提供如下技术方案:
11.一种智能化曲面自适应轮式爬壁机器人,包括车身、行走移动机构、轮臂四杆机构、永磁吸附力可调机构、传感器及控制装置。
12.车身整体为一块350
×
280
×
5mm大小的矩形板,采用6061铝合金材料,具有较好的强度且材料重量较轻,车身上设有减重孔,有助于减轻整体重量且便于控制系统布线。
13.所述传感器及控制装置,包括:整体控制系统、激光测径仪、摄像头、控制天线和舵机,整体控制系统安装在车身中间位置,用于接收和发出指令信号;激光测径仪安装在车身后方,用于检测管壁的曲率;摄像头位于车身正前方处,并通过舵机调整其角度,用于观察爬壁机器人前方路况;在车身左侧装有一根控制天线,可用于接收和传输无线射频信号。
14.整体控制系统的主控芯片cpu可采用stm32f103vet6,通过2.4g无线射频信号进行
遥控,并将摄像头图像、机器人位置信号和实时速度监测等数据传回到遥控端。
15.行走移动机构共由三个独立驱动的万向轮移动模块组成,分别位于车身的正前方及后方左右两侧,每个万向轮移动模块均包括:安装板、u形架、万向轮、驱动电机、换向电机和弹簧;
16.所述万向轮转动安装在所述u形架内,所述驱动电机输出轴与万向轮连接,所述u形架上方安装有换向电机,所述弹簧套设在所述换向电机外侧,所述换向电机上方固定设置有所述安装板,正前方的万向轮移动模块通过所述安装板固定安装在车身下表面。
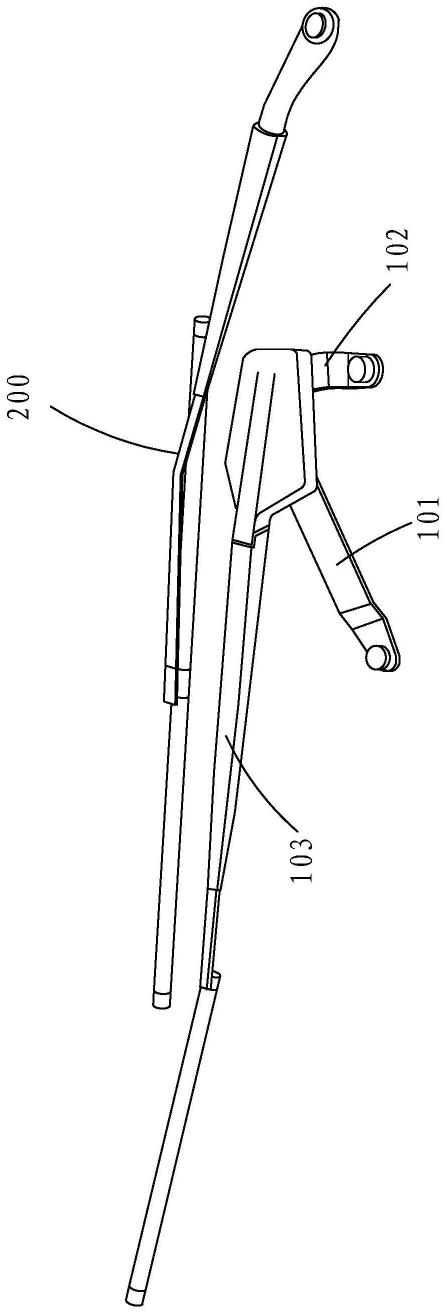
17.所述轮臂四杆机构有两组,对称设置在车身后方两侧,所述轮臂四杆机构由滚珠丝杠装置、拉杆、连接架及铰接固定板组成;
18.进一步地,其中滚珠丝杠装置包括步进电机一,所述步进电机一固定安装在车身上,所述步进电机一输出轴与丝杠一转动连接,所述丝杠一的表面套设有丝杠螺母一;拉杆的一端通过螺栓与丝杠螺母一转动连接,另一端与连接架的下端连接,所述连接架与所述拉杆垂直设置,所述连接架上端与铰接固定板固定连接,所述安装座固定安装在车身下表面,所述铰接固定板的另一端与万向轮移动模块中的安装板固定连接。
19.进一步地,所述永磁吸附力可调机构包括第一平板和第二平板,所述第二平板位于第一平板正上方,所述第一平板固定安装在车身上表面,所述第一平板和第二平板之间垂直设置有两根导柱,所述第一平板下表面固定安装有步进电机二,所述步进电机二的传动轴穿过第一平板并于联轴器的一端连接,所述联轴器的另一端与丝杠二的一端连接,所述丝杠二的另一端与第二平板转动连接,所述丝杠二的外表面套设有丝杠螺母二,所述丝杠螺母二的外侧固定安装有升降板,所述升降板与两根导柱滑动连接,所述升降板的下表面固定安装有四根立柱,所述四根立柱两两对称设置,左侧两根立柱下端通过螺栓与铝合金箱体上表面固定连接,右侧两根立柱下端也通过螺栓与另外一个铝合金箱体上表面固定连接;每个所述铝合金箱体内均放置有永磁吸附模块。
20.进一步地,丝杠二与丝杠螺母二之间的螺距为3mm。
21.进一步地,所述铝合金箱体的两侧均固定安装有滑块,所述滑块与固定安装在车身下方的滑轨相互配合。
22.进一步地,永磁吸附模块包括:一块轭铁、一个磁铁固定板以及四个大小相同的矩形永磁铁块。永磁吸附模块采用乙型磁路排布,永磁铁块采用沿高度方向磁化的矩形磁块,并选用具有高磁积能的钕铁硼磁性材料,轭铁和磁铁固定板采用纯铁或低碳钢制成,矩形永磁铁块通过磁铁固定板固定在轭铁的下方,每个矩形永磁铁块之间保持一定的间隙,且相邻磁极之间极性互不相同。
23.一种智能化曲面自适应轮式爬壁机器人的工作方法,包括如下步骤:
24.第一步:由整体控制系统发出的指令信号,使永磁吸附力可调机构进行上下移动,从而调整矩形永磁铁块与管道壁面之间的间隙,使磁吸附力能够满足工作的要求并具有可调性。
25.第二步:通过安装在车身上的激光测径仪完成对管道曲率的检测,并由整体控制系统发出指令,使轮臂四杆机构能够自主调节轮臂的张角,保证车身两后轮与管壁的实时贴合。
26.第三步:通过每个万向轮移动模块上的驱动电机,驱动万向轮进行转动,使爬壁机
器人能够完成沿管道移动。
27.第四步:当需要进行转向时,通过整体控制系统调节每个移动模块上换向电机工作,通过换向电机驱动u形架旋转,从而实现万向轮的转向。
28.本实用新型的技术效果和优点:
29.1、本实用新型通过车身上激光测径仪对管径曲率进行自主检测,使轮臂四杆机构接收到控制系统发出的指令信号并调整轮臂张角,从而调整车轮的位姿使其与管壁贴合,并且可以通过丝杠装置改变吸附模块与壁面之间的间隙,调节磁吸附力的大小,进一步提高爬壁机器人的整体适应性及运动性能,与现有技术相比,有效解决了运动稳定性较差和磁吸附力不可调等问题,可以适应曲面、凹凸面等非常规作业环境,并且可以根据工作壁面位置的不同来调节磁吸附力的大小,可以有效减小能源消耗,提升作业效率,便于拆卸;
30.2、本实用新型采用安装三个独立驱动的万向轮移动模块来实现沿管壁的轴向及周向运动,并且结合车身可以组成一个类似的悬架结构,可以减小车身受到的震动,保持爬壁机器人在凹凸不平的曲面上行走的稳定性。
附图说明
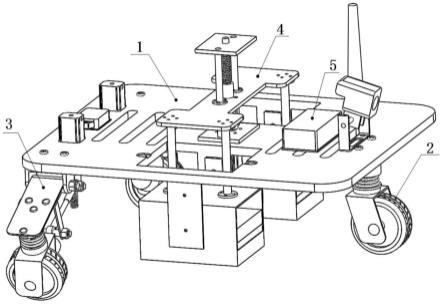
31.图1为本实用新型的一种智能化曲面自适应轮式爬壁机器人的结构示意图。
32.图2为本实用新型的一种智能化曲面自适应轮式爬壁机器人的另一方向结构示意图。
33.图3为本实用新型的一种智能化曲面自适应轮式爬壁机器人的行走移动机构结构示意图。
34.图4为本实用新型的一种智能化曲面自适应轮式爬壁机器人的轮臂四杆机构和行走移动机构结构示意图。
35.图5为本实用新型的一种智能化曲面自适应轮式爬壁机器人的直立式滚珠丝杠机构结构示意图。
36.图6为本实用新型的一种智能化曲面自适应轮式爬壁机器人的永磁吸附模块辅助装置结构示意图。
37.图7为本实用新型的一种智能化曲面自适应轮式爬壁机器人的永磁吸附模块主剖视图。
38.图8为本实用新型的一种智能化曲面自适应轮式爬壁机器人的永磁吸附模块仰视图。
39.图9为本实用新型的一种智能化曲面自适应轮式爬壁机器人沿圆柱形管道轴向行走的示意图。
40.图10为本实用新型的一种智能化曲面自适应轮式爬壁机器人沿圆柱形管道周向行走的示意图。
41.附图标记为:1、车身;
42.2、行走移动机构;201、万向轮;202、驱动电机;203、换向电机;204、弹簧;
43.3、轮臂四杆机构;301、拉杆;302、连接架;303、铰接固定板;304、步进电机一;305、丝杠一;306、丝杠螺母一;
44.4、永磁吸附力可调机构;401、步进电机二;402、传动轴;403、联轴器;404、丝杠二;
405、丝杠螺母二;406、导柱;407、升降板;408、立柱;409、铝合金箱体;410、滑块;411、导轨;412、轭铁;413、磁铁固定板;414、矩形永磁铁块;
45.5、传感器及控制装置;501、整体控制系统;502、激光测径仪;503、摄像头;504、控制天线;505、舵机;
46.6、管道。
具体实施方式
47.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
48.如附图1-10所示,本实用新型的一种智能化曲面自适应轮式爬壁机器人的整体结构主要包括车身1、行走移动机构2、轮臂四杆机构3、永磁吸附力可调机构4、传感器及控制装置5。
49.车身1整体为一块350
×
280
×
5mm大小的矩形板,采用6061铝合金材料,具有较好的强度且材料重量较轻,车身1上设有减重孔,有助于减轻整体重量且便于控制系统布线。本实用新型为满足爬壁机器人在管壁上能实现灵活转向的功能,对于行走移动模块,采用安装三个独立驱动的万向轮移动模块来实现沿管壁的轴向及周向运动。每个万向轮移动模块包括万向轮201、驱动电机202、换向电机203和弹簧204,其中换向电机203和弹簧204安装在万向轮201的上端并与车身1相连,组成一个类似的悬架结构,悬架结构的作用在于可以减小车身受到的震动,保持爬壁机器人在凹凸不平的曲面上行走的稳定性。
50.所述传感器及控制装置5,如附图2所示,包括:整体控制系统501、激光测径仪502、摄像头503、控制天线504和舵机505,整体控制系统501安装在车身1中间位置,用于接收和发出指令信号;激光测径仪502安装在车身1后方,用于检测管壁的曲率;摄像头503位于车身1正前方处,并通过舵机505调整其角度,用于观察爬壁机器人前方路况;在车身1左侧装有一根控制天线504,可用于接收和传输无线射频信号。
51.整体控制系统501的主控芯片cpu可采用stm32f103vet6,通过2.4g无线射频信号进行遥控,并将摄像头图像、机器人位置信号和实时速度监测等数据传回到遥控端。
52.如附图3所示,为本实用新型的行走移动机构2的结构示意图,行走移动机构2共由三个独立驱动的万向轮移动模块组成,分别位于车身的正前方及后方左右两侧,每个万向轮移动模块均包括:安装板、u形架、万向轮201、驱动电机202、换向电机203和弹簧204;
53.所述万向轮201转动安装在所述u形架内,所述驱动电机202输出轴与万向轮201连接,所述u形架上方固定安装有换向电机203,所述弹簧204套设在所述换向电机203外侧,所述换向电机203上方固定设置有所述安装板,正前方的万向轮移动模块通过所述安装板固定安装在车身1下表面。
54.通过换向电机203和弹簧204组成一个类似的悬架结构,悬架结构的作用在于可以减小车身行走时受到的震动,在一定程度上提高车轮的越障性能,保持爬壁机器人在凹凸不平的曲面上行走的稳定性。
55.如附图4所示,为本实用新型的轮臂四杆机构3和行走移动机构2结构示意图,所述
轮臂四杆机构3类似于一种曲柄滑块机构,整体结构由滚珠丝杠装置、拉杆301、连接架302及铰接固定板303组成;
56.其中滚珠丝杠装置包括步进电机一304、丝杠一305和丝杠螺母一306。将拉杆301两端通过螺栓分别与丝杠螺母一306和连接架302固定连接,连接架302上端与铰接固定板303由螺栓连接,并位于铰接固定板303下方,铰接固定板303的一端通过铰接轴安装在车身1的下方,另一端连接车身1后轮的万向轮移动模块,当丝杠螺母一306通过步进电机一304进行上下移动时,拉杆301受到作用力会使得铰接固定板303上的万向轮移动模块相对摆动,通过车身1上激光测径仪502对管径曲率进行自主检测,使轮臂四杆机构3接收到控制系统501发出的指令信号并调整轮臂张角,从而调整车轮的位置使其与管壁贴合。
57.如附图5所示,为本实用新型的直立式滚珠丝杠机构结构示意图,其作用在于调节永磁吸附模块与管壁之间的间隙,实现爬壁机器人的吸附力可调,直立式滚珠丝杠机构包括:步进电机二401、传动轴402、联轴器403、丝杠二404、丝杠螺母二405、导柱406、升降板407,立柱408,四根立柱408上下两端通过螺栓分别与铝合金箱体409上表面和升降板407进行固定连接,丝杠二404与导柱406处在升降板407中间位置,并通过安装在车身1上底座进行定位,步进电机二401安装在车身1的下方,并通过传动轴402和联轴器403为丝杠二404传递扭矩,丝杠螺母二405通过螺栓连接与升降板407固定,丝杠二404与丝杠螺母二405之间的螺距为3mm,并组成运动副,通过丝杠螺母二405带动升降板407进行上下移动,从而实现永磁吸附模块的上下升降,使爬壁机器人对管壁的吸附力大小发生改变。
58.如图6为本实用新型的永磁吸附模块辅助装置结构示意图,该辅助装置包括:铝合金箱体409、滑块410以及导轨411,考虑到管道表面或内部由于腐蚀会产生铁锈等杂质吸附到永磁体上,因此将整个吸附模块放置在铝合金箱体409内,铝合金箱体409厚度设置在1mm左右,使铁锈等杂质不会直接吸附在永磁体表面,同时铝合金箱体409几乎不会对磁吸附力造成影响,考虑到吸附模块需要进行上下移动,因此在铝合金箱体409左右两侧分别安装一个导轨411,便于吸附模块进行上下调节。
59.附图7和附图8分别为永磁吸附模块的主剖面图和仰视图,本实施例中采用非接触式永磁吸附方式,永磁吸附模块包括:两块轭铁412、四个磁铁固定板413以及八个大小相同的矩形永磁铁块414。永磁吸附模块分为两组位于车身1中间底部左右两侧,永磁吸附模块下方与管壁保持一定的间隙,整个永磁吸附模块放置在铝合金箱体409内部。
60.吸附模块采用乙型磁路排布,永磁铁块414采用沿高度方向磁化的矩形磁块,并选用具有高磁积能的钕铁硼磁性材料,轭铁412和磁铁固定板413采用纯铁或低碳钢制成,矩形永磁铁块414用磁铁固定板413固定在轭铁412的下方,每个矩形永磁铁块414之间保持一定的间隙,且相邻磁极之间极性互不相同。
61.附图9为本实用新型沿圆柱形管道作轴向行走的示意图,其中管道6直径为1000mm,车身1后轮通过激光测径仪502完成对管壁的曲率自主检测,使轮臂四杆机构3接收到控制系统501发出的指令,并随之调整好轮臂四杆机构3的张角使万向轮移动模块能够随着管壁曲率变化而做出相应的调整,实现爬壁机器人与管壁的实时贴合。
62.附图10为本实用新型沿圆柱形管道作周向行走的示意图,本实施例采用万向轮作为行走移动模块,其优势在于能在不改变自身姿态的情况下实现全向运动、转向灵活且转向半径小,由于本实施例采用的是三轮驱动方式,在管壁上能够更好的实现曲线运动轨迹。
63.本实用新型的工作方法,以图1-图10所示,包括如下步骤:
64.第一步:由整体控制系统501发出的指令信号,使永磁吸附力可调机构4进行上下移动,从而调整矩形永磁铁块414与管道壁面之间的间隙,使磁吸附力能够满足工作的要求并具有可调性。
65.第二步:通过安装在车身1上的激光测径仪502完成对管道曲率的检测,并由整体控制系统501发出指令,使轮臂四杆机构3能够自主调节轮臂的张角,保证车身1两后轮与管壁的实时贴合。
66.第三步:由每个万向轮移动模块上的驱动电机202,驱动万向轮201进行转动,使本实施例能够完成沿管道6轴向上,向前及向后的移动。当需要进行转向时,通过整体控制系统501调节每个移动模块上换向电机203工作,并带动u形架使万向轮201实现转向。
67.最后应说明的几点是:首先,在本技术的描述中,需要说明的是,除非另有规定和限定,术语“安装”、“相连”、“连接”应做广义理解,可以是机械连接或电连接,也可以是两个元件内部的连通,可以是直接相连,“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变,则相对位置关系可能发生改变;
68.其次:本实用新型公开实施例附图中,只涉及到与本公开实施例涉及到的结构,其他结构可参考通常设计,在不冲突情况下,本实用新型同一实施例及不同实施例可以相互组合;
69.最后:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。