1.本发明涉及汽车领域,特别是涉及一种基于物联网的智能驾驶卫星测试模拟方法。以及,一种基于物联网的智能驾驶卫星测试模拟系统。
背景技术:
2.随着通信技术、传感器技术的更新换代,以智能驾驶为核心的车联网技术不断发展。智能驾驶车辆可以实现对周围环境的感知,与智能车辆,地面单元进行信息的交互,从而实现车辆的定位与追踪、实时高效的车辆调度,减少因疲劳驾驶以及酒驾等一系列人为因素导致的交通事故,为人们的外出提供更加方便舒适的条件。
3.在实际的智能驾驶车辆行驶中,高精度的车辆位置信息是实现智能驾驶功能的重要前提。而在智能驾驶的功能测试中也需要获取车辆位置的准确信息。而现有技术依旧存在着定位精度不高的问题。要满足车辆自主驾驶和对其测试的场景需求,一般需要的是亚米级别的定位精度。然而传统的全球定位系统系统仅能提供10米左右的定位精度,不能实现满足智能驾驶“车道级别”的定位需求。对智能驾驶的场景测试而言,现有定位策略也无法满足厘米级的测试需求,会导致大量无意义的失败测试和校准时间。此外gps所提供的位置信息仅为二维位置信息,缺乏车辆在垂直域位置及各个方向上转动信息,无法获得测试过程中车辆的姿态信息,具有很大的局限性。
4.传统模拟定位技术测试场地要求较高,不够灵活,在封闭场地的智能驾驶场景测试中,获取的定位也不精确,十分影响自动驾驶技术的研发。因此亟需一种获取测试车辆位置、速度、加速度及姿态等行驶状态信息的定位技术来进行智能驾驶场景测试定位模拟,保证可以在智能驾驶行驶及测试过程中进行卫星定位的精确模拟和测试车辆的位姿的精确反馈采集。
技术实现要素:
5.在发明内容部分中引入了一系列简化形式的概念,该简化形式的概念均为本领域现有技术简化,这将在具体实施方式部分中进一步详细说明。本发明的发明内容部分并不意味着要试图限定出所要求保护的技术方案的关键特征和必要技术特征,更不意味着试图确定所要求保护的技术方案的保护范围。
6.本发明要解决的技术问题是提供一种基于物联网模拟gps定位信号,能进行gps精度和信号强弱的调整模拟各种场景下的gps定位信号变化,gps定位精度高、速度快,延迟低的基于物联网的智能驾驶卫星测试模拟方法。
7.以及,本发明还提供了一种基于物联网模拟gps定位信号,能进行gps精度和信号强弱的调整模拟各种场景下的gps定位信号变化,gps定位精度高、速度快,延迟低的基于物联网的智能驾驶卫星测试模拟系统。
8.为解决上述技术问题,本发明提供的基于物联网的智能驾驶卫星测试模拟方法,包括以下步骤:
9.s1,提供物联网系统覆盖的智能驾驶场景测试场地;
10.s2,测试车辆感知智能驾驶场景测试场的场景环境信息,通过与gps信号及高精地图配合进行数据融合后,由测试车辆决策系统规划路径和车辆行为,输出至测试车辆执行系统执行;
11.s3,智能驾驶场景测试场地的联网系统实时感知测量测试车辆动态参数,并记录测试车辆的行驶轨迹及各种行为动作;
12.s4,联网系统将测试车辆的相对定位信息转换成基于大地坐标行驶的绝对定位信息,形成测试车辆绝对行驶定位信号后再通过gps信号模拟将其转换为测试车辆可用的gps定位信号发送至测试车辆;
13.s5,测试车辆决策系统根据所述gps定位信号以及感知智能驾驶场景测试场的场景环境信息规划路径和车辆行为。
14.物联网(internet of things,简称iot)是指通过各种信息传感器、射频识别技术、全球定位系统、红外感应器、激光扫描器等各种装置与技术,实时采集任何需要监控、连接、互动的物体或过程,采集其声、光、热、电、力学、化学、生物、位置等各种需要的信息,通过各类可能的网络接入,实现物与物、物与人的泛在连接,实现对物品和过程的智能化感知、识别和管理。物联网是一个基于互联网、传统电信网等的信息承载体,它让所有能够被独立寻址的普通物理对象形成互联互通的网络。
15.可选择的,进一步改进所述基于物联网的智能驾驶卫星测试模拟方法,所述场景环境信息包括:前方目标障碍物位置信息、交通参与者位置信息和运动信息,以及交通标识信息。
16.可选择的,进一步改进所述基于物联网的智能驾驶卫星测试模拟方法,联网系统实时感知测量测试车辆动态参数包括:车辆位置姿态、车辆行驶速度和车辆运动加速度。
17.可选择的,进一步改进所述基于物联网的智能驾驶卫星测试模拟方法,其能用于智能驾驶及adas的场景测试。
18.为解决上述技术问题,本发明提供一种基于物联网的智能驾驶卫星测试模拟系统,包括:
19.模拟测试场景模块,其用于提供测试所需模拟环境;
20.物联网模块,其覆盖测试模拟环境,其实时感知测量测试车辆动态参数,并记录测试车辆的行驶轨迹及各种行为动作;
21.以及,将测试车辆的相对定位信息转换成基于大地坐标行驶的绝对定位信息,形成测试车辆绝对行驶定位信号发送至gps信号模拟装置;
22.gps信号模拟装置,其将其测试车辆绝对行驶定位信号转换为测试车辆可用的gps定位信号发送至测试车辆;
23.其中,测试车辆感知智能驾驶场景测试场的场景环境信息,通过与gps信号及高精地图配合进行数据融合后,由测试车辆决策系统规划路径和车辆行为,输出至测试车辆执行系统执行。
24.可选择的,进一步改进所述基于物联网的智能驾驶卫星测试模拟系统,所述场景环境信息包括:前方目标障碍物位置信息、交通参与者位置信息和运动信息,以及交通标识信息。
25.可选择的,进一步改进所述基于物联网的智能驾驶卫星测试模拟系统,物联网模块实时感知测量测试车辆动态参数包括:车辆位置姿态、车辆行驶速度和车辆运动加速度。
26.可选择的,进一步改进所述基于物联网的智能驾驶卫星测试模拟系统,其能用于智能驾驶及adas的场景测试。
27.智能驾驶车辆在行驶时需要实时的获取周围的环境信息,以及自车的位姿信息,再通过车辆的决策系统进行决策和规划。传统的gps多路径反射以及gps的低更新频率会给高速行驶的车辆带来明显的误差而惯性导航系统的传感器存在偏差且受外部因素的影响,也会给行车定位带来误差,无法满足智能驾驶测试中的测试车辆的行驶需求,也不能通过对测试车辆高精度的定位搭建相应的测试场景。
28.为了给予测试车辆更精确的精确定位,本发明在测试场地设立基于物联网的目标物定位系统。可以在固定场地中实时检测测试车辆的位置、速度、加速度和姿态变化等信息,此定位信息进行处理计算后为测试车辆相对测试场地的相对状态定位信息,得到精确的场地定位信息后,通过gps定位模拟将得到的测试车辆实时相对定位转化为大地坐标下的测试车辆gps绝对定位信号,此信号用于代替模拟测试车辆正常行驶中的gps定位信号。测试车辆得到由物联网传感技术获得的自车高精度gps定位。当测试车辆在测试场地中进行各种测试时,以5g的通信方式得到由物联网感知技术获得的自车高精度gps定位信号。
29.物联网系统通过多融合感知技术能使在测试场地中得到的测试车辆定位信息及其传输方式,具有精度高、速度快,延迟低等优点,能够满足智能驾驶的测试需求。本发明以物联网感知为基础模拟的gps定位信号的方式比较灵活,可以进行精度和信号强弱的调整来模拟各种场景下的gps定位信号变化。通过这种方式获得的定位信息受天气环境影响较小,封闭环境下信号不会被遮挡。在执行智能驾驶场景测试定位模拟时,保证可以在智能驾驶行驶及测试过程中进行卫星定位的精确模拟和测试车辆的位姿的精确反馈采集,能提高智能驾驶及adas的场景测试的准确性。
附图说明
30.本发明附图旨在示出根据本发明的特定示例性实施例中所使用的方法、结构和/或材料的一般特性,对说明书中的描述进行补充。然而,本发明附图是未按比例绘制的示意图,因而可能未能够准确反映任何所给出的实施例的精确结构或性能特点,本发明附图不应当被解释为限定或限制由根据本发明的示例性实施例所涵盖的数值或属性的范围。下面结合附图与具体实施方式对本发明作进一步详细的说明:
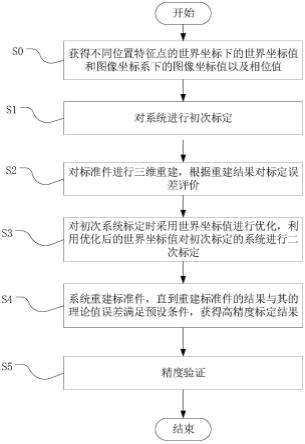
31.图1是本发明原理是示意图。
具体实施方式
32.以下通过特定的具体实施例说明本发明的实施方式,本领域技术人员可由本说明书所公开的内容充分地了解本发明的其他优点与技术效果。本发明还可以通过不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点加以应用,在没有背离发明总的设计思路下进行各种修饰或改变。需说明的是,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。本发明下述示例性实施例可以多种不同的形式来实施,并且不应当被解释为只限于这里所阐述的具体实施例。应当理解的是,提供这些实施例
是为了使得本发明的公开彻底且完整,并且将这些示例性具体实施例的技术方案充分传达给本领域技术人员。
33.第一实施例;
34.本发明提供一种基于物联网的智能驾驶卫星测试模拟方法,包括以下步骤:
35.s1,提供物联网系统覆盖的智能驾驶场景测试场地;
36.s2,测试车辆感知智能驾驶场景测试场的场景环境信息,通过与gps信号及高精地图配合进行数据融合后,由测试车辆决策系统规划路径和车辆行为,输出至测试车辆执行系统执行;
37.s3,智能驾驶场景测试场地的联网系统实时感知测量测试车辆动态参数,并记录测试车辆的行驶轨迹及各种行为动作;
38.s4,联网系统将测试车辆的相对定位信息转换成基于大地坐标行驶的绝对定位信息,形成测试车辆绝对行驶定位信号后再通过gps信号模拟将其转换为测试车辆可用的gps定位信号发送至测试车辆;
39.s5,测试车辆决策系统根据所述gps定位信号以及感知智能驾驶场景测试场的场景环境信息规划路径和车辆行为。
40.应当理解的是,当元件被称作“连接”或“结合”到另一元件时,该元件可以直接连接或结合到另一元件,或者可以存在中间元件。不同的是,当元件被称作“直接连接”或“直接结合”到另一元件时,不存在中间元件。在全部附图中,相同的附图标记始终表示相同的元件。如在这里所使用的,术语“和/或”包括一个或多个相关所列项目的任意组合和所有组合。应当以相同的方式解释用于描述元件或层之间的关系的其他词语(例如,“在
……
之间”和“直接在
……
之间”、“与
……
相邻”和“与
……
直接相邻”、“在
……
上”和“直接在
……
上”等)。
41.第二实施例;
42.本发明提供一种基于物联网的智能驾驶卫星测试模拟方法,其能用于智能驾驶及adas的场景测试,包括以下步骤:
43.s1,提供物联网系统覆盖的智能驾驶场景测试场地;
44.s2,测试车辆感知智能驾驶场景测试场中前方目标障碍物位置信息、交通参与者位置信息和运动信息,以及交通标识信息,通过与gps信号及高精地图配合进行数据融合后,由测试车辆决策系统规划路径和车辆行为,输出至测试车辆执行系统执行;
45.s3,智能驾驶场景测试场地的联网系统实时感知测量测试车辆位置姿态、车辆行驶速度和车辆运动加速度,并记录测试车辆的行驶轨迹及各种行为动作;
46.s4,联网系统将测试车辆的相对定位信息转换成基于大地坐标行驶的绝对定位信息,形成测试车辆绝对行驶定位信号后再通过gps信号模拟将其转换为测试车辆可用的gps定位信号发送至测试车辆;
47.s5,测试车辆决策系统根据所述gps定位信号以及感知智能驾驶场景测试场的场景环境信息规划路径和车辆行为。
48.这里所使用的术语仅是为了描述具体实施例,而非意图限制根据本发明的示例性实施例。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式。此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在所
述特征、整体、步骤、操作、元件和/或组件,但不排除存在或附加一个或多个其他特征、整体、步骤、操作、元件、组件和/或它们的组合。
49.第三实施例;
50.本发明提供一种基于物联网的智能驾驶卫星测试模拟系统,包括:
51.模拟测试场景模块,其用于提供测试所需模拟环境;
52.物联网模块,其覆盖测试模拟环境,其实时感知测量测试车辆动态参数,并记录测试车辆的行驶轨迹及各种行为动作;
53.以及,将测试车辆的相对定位信息转换成基于大地坐标行驶的绝对定位信息,形成测试车辆绝对行驶定位信号发送至gps信号模拟装置;
54.gps信号模拟装置,其将其测试车辆绝对行驶定位信号转换为测试车辆可用的gps定位信号发送至测试车辆;
55.其中,测试车辆感知智能驾驶场景测试场的场景环境信息,通过与gps信号及高精地图配合进行数据融合后,由测试车辆决策系统规划路径和车辆行为,输出至测试车辆执行系统执行。
56.第四实施例;
57.本发明提供一种基于物联网的智能驾驶卫星测试模拟系统,其能用于智能驾驶及adas的场景测试,包括:
58.模拟测试场景模块,其用于提供测试所需模拟环境;示例性的,例如采用中国专利202110930576.8中所描述的技术方案作为模拟测试场景模块;
59.物联网模块,其覆盖测试模拟环境,其实时感知测量测试车辆位置姿态、车辆行驶速度和车辆运动加速度,并记录测试车辆的行驶轨迹及各种行为动作;
60.以及,将测试车辆的相对定位信息转换成基于大地坐标行驶的绝对定位信息,形成测试车辆绝对行驶定位信号发送至gps信号模拟装置;
61.gps信号模拟装置,其将其测试车辆绝对行驶定位信号转换为测试车辆可用的gps定位信号发送至测试车辆;
62.其中,测试车辆感知智能驾驶场景测试场的前方目标障碍物位置信息、交通参与者位置信息和运动信息,以及交通标识信息,通过与gps信号及高精地图配合进行数据融合后,由测试车辆决策系统规划路径和车辆行为,输出至测试车辆执行系统执行。
63.除非另有定义,否则这里所使用的全部术语(包括技术术语和科学术语)都具有与本发明所属领域的普通技术人员通常理解的意思相同的意思。还将理解的是,除非这里明确定义,否则诸如在通用字典中定义的术语这类术语应当被解释为具有与它们在相关领域语境中的意思相一致的意思,而不以理想的或过于正式的含义加以解释。
64.以上通过具体实施方式和实施例对本发明进行了详细的说明,但这些并非构成对本发明的限制。在不脱离本发明原理的情况下,本领域的技术人员还可做出许多变形和改进,这些也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。